Decoupling Research of a Novel Three-Dimensional Force Flexible Tactile Sensor Based on an Improved BP Algorithm

Abstract
:1. Introduction
2. Principles and Methods
2.1. Properties of Conductive Rubber
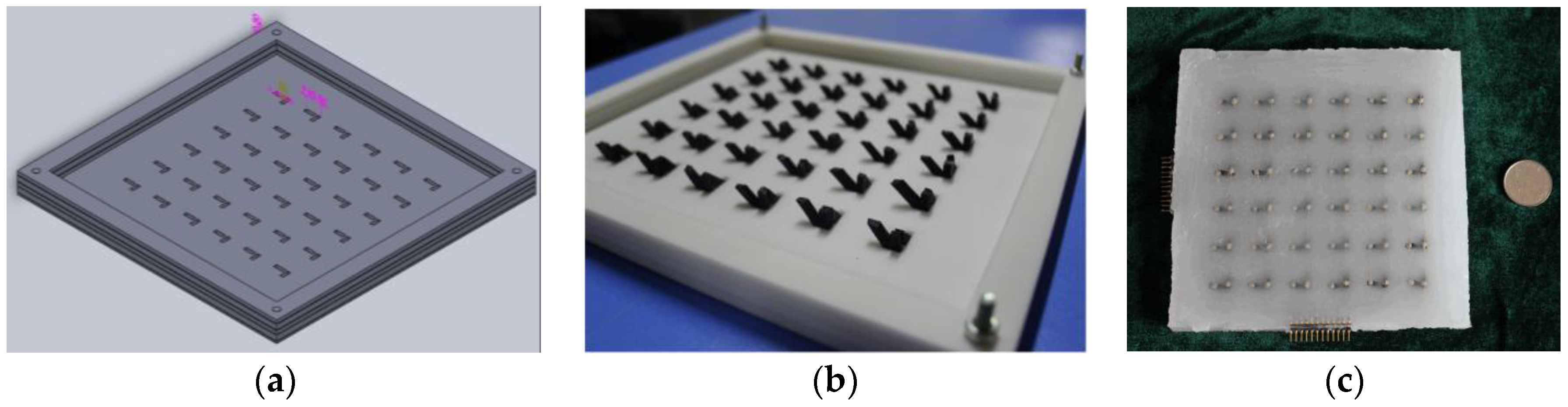
2.2. Prototype of the Tactile Sensor Array
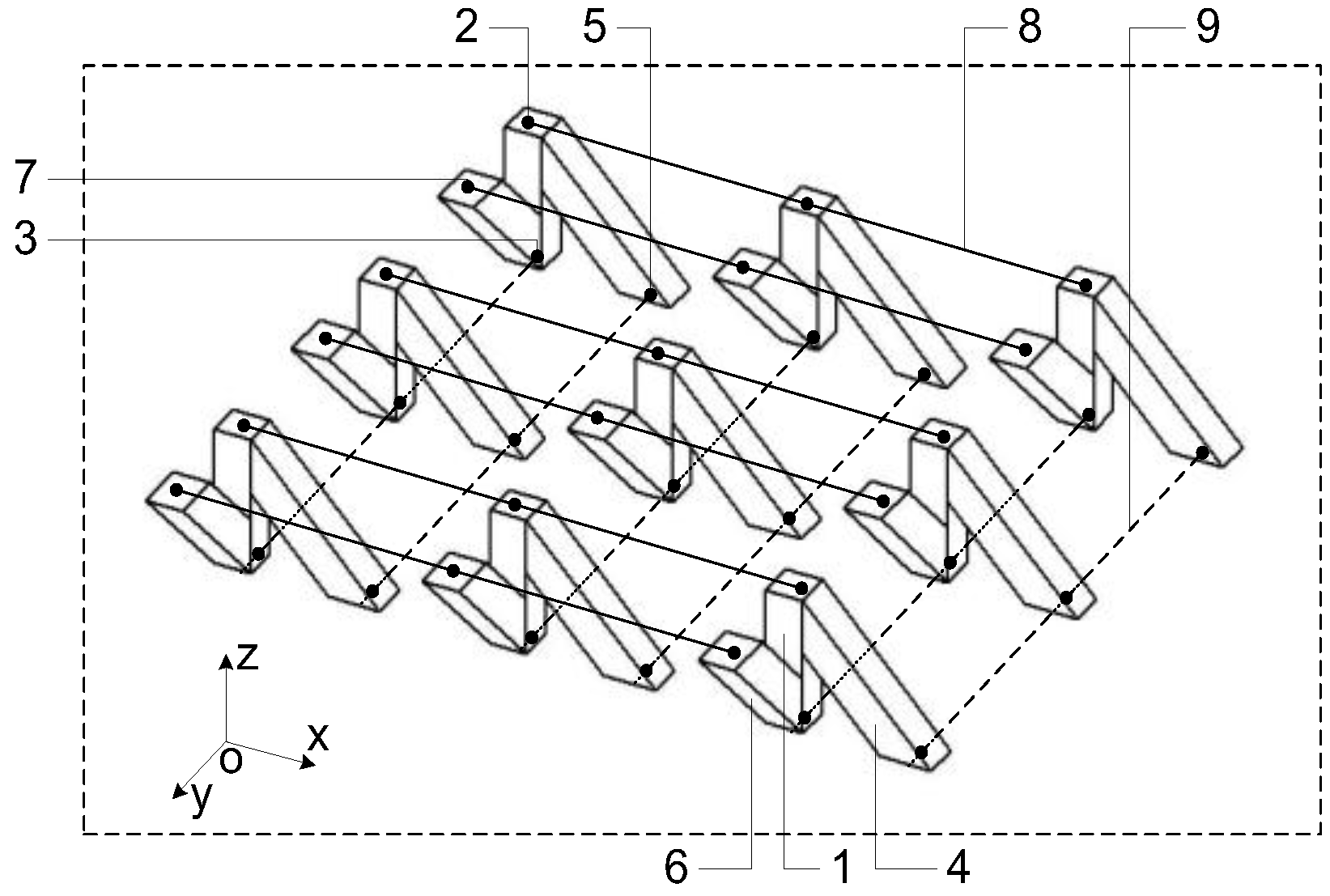
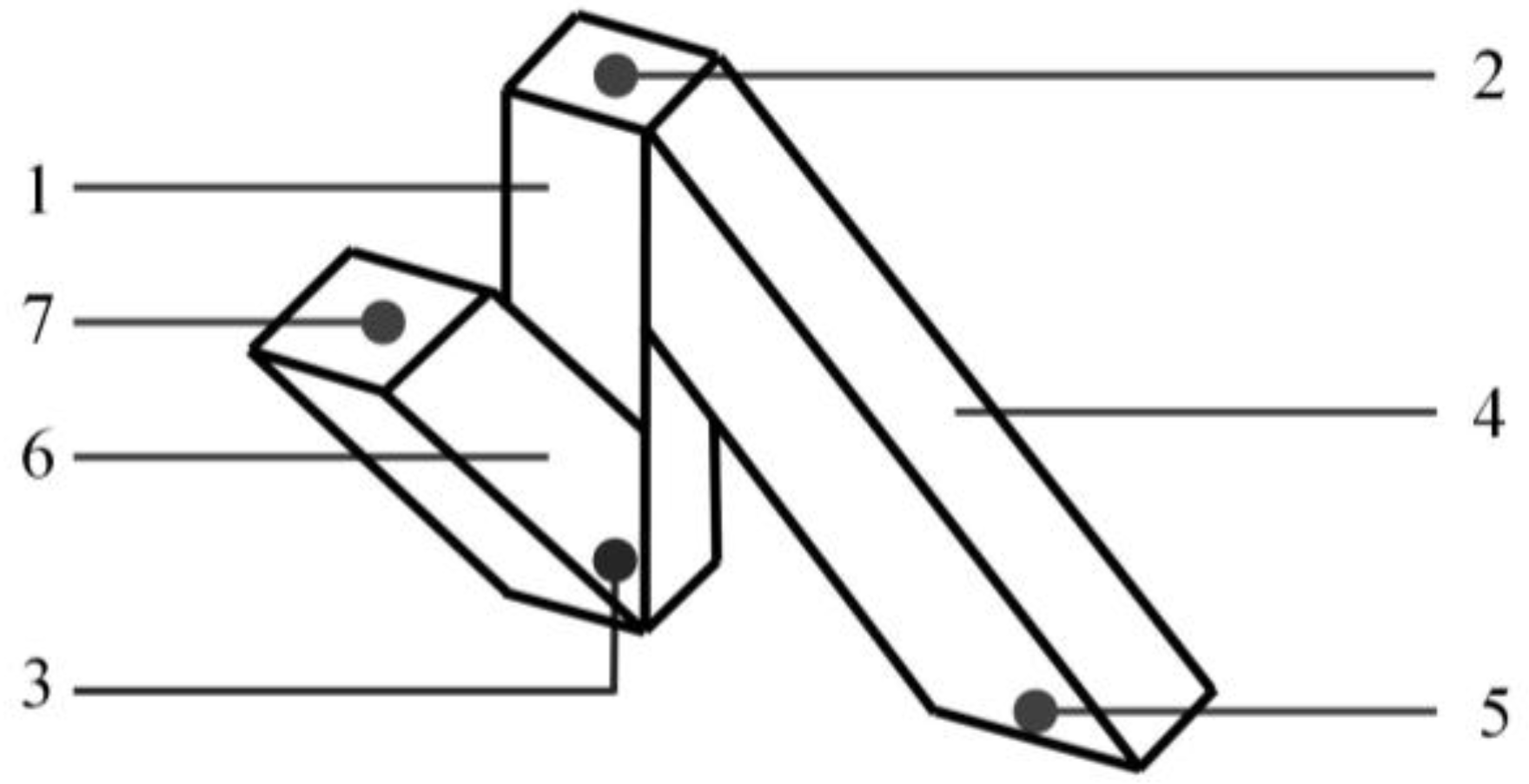
2.3. Structure of the Flexible Tactile Sensor
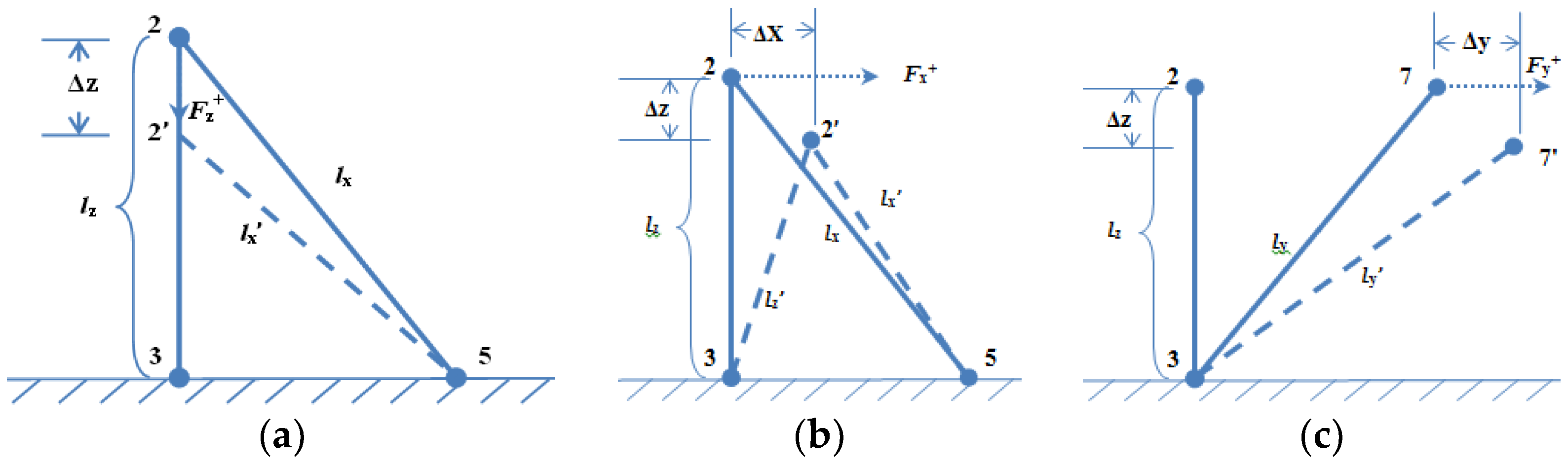
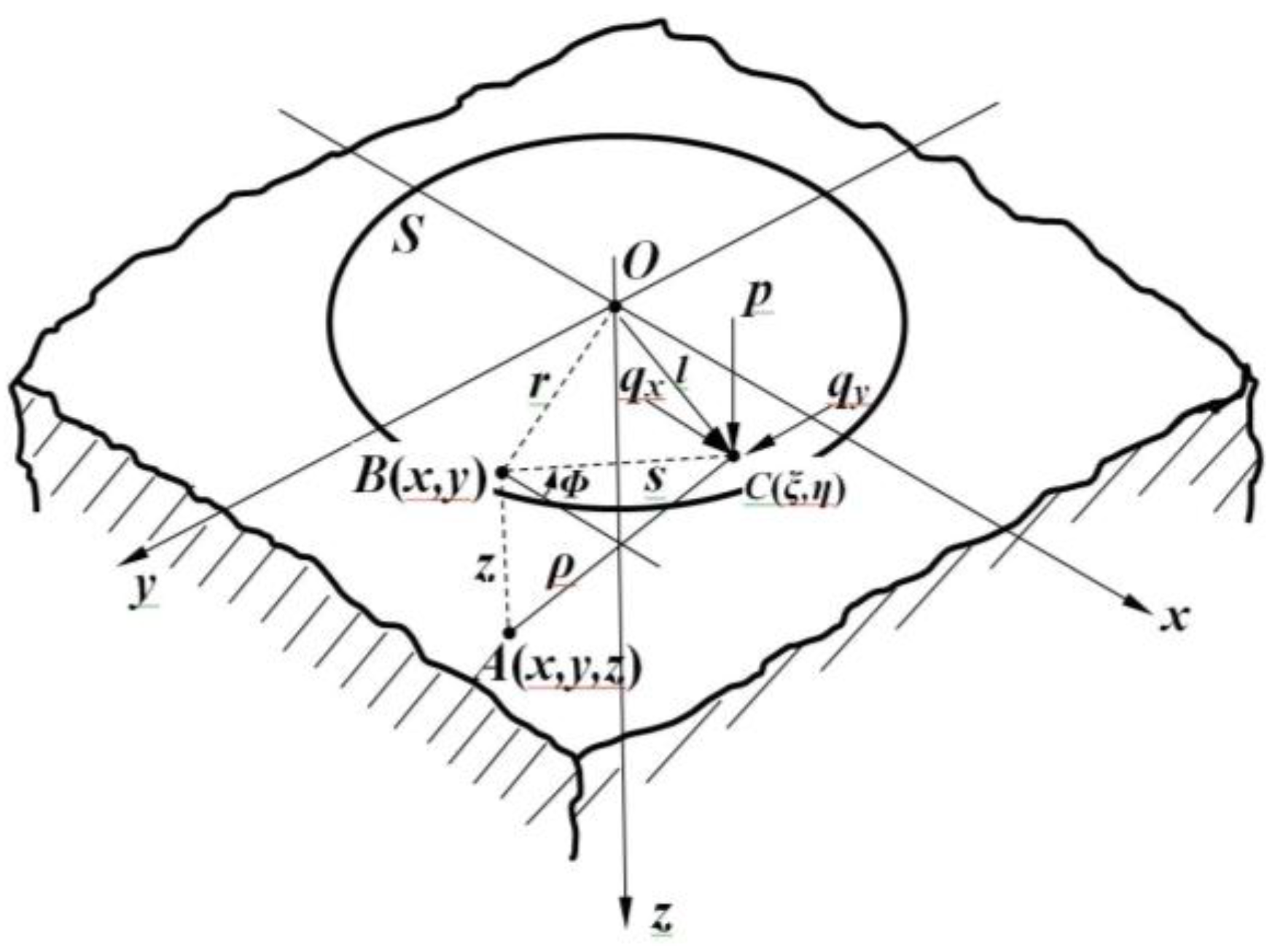
2.4. Detection Principle and Mathematical Model
2.5. Analytical Analysis
2.6. The Improved BP Algorithm
3. Decoupling Results and Discussion
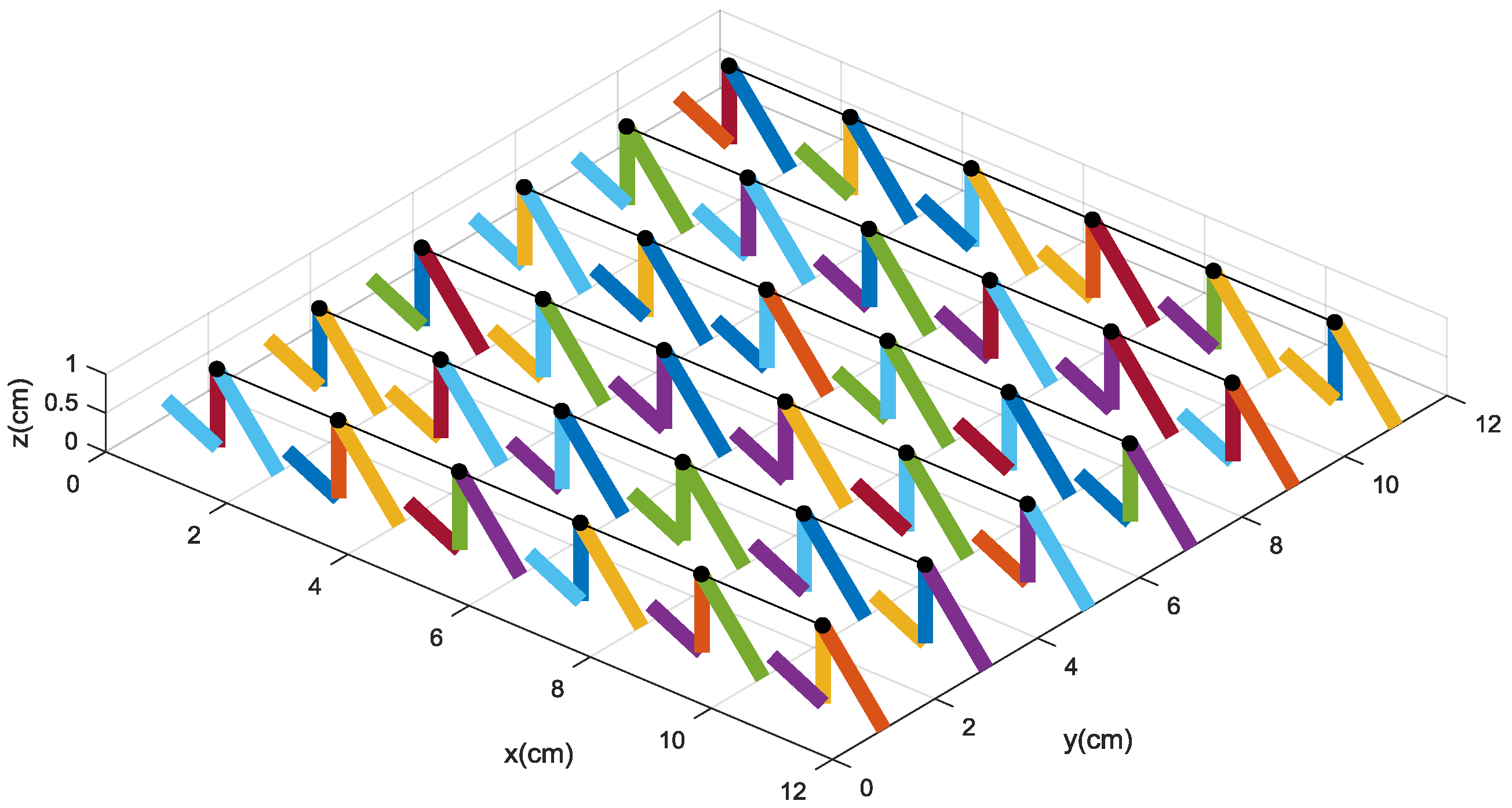
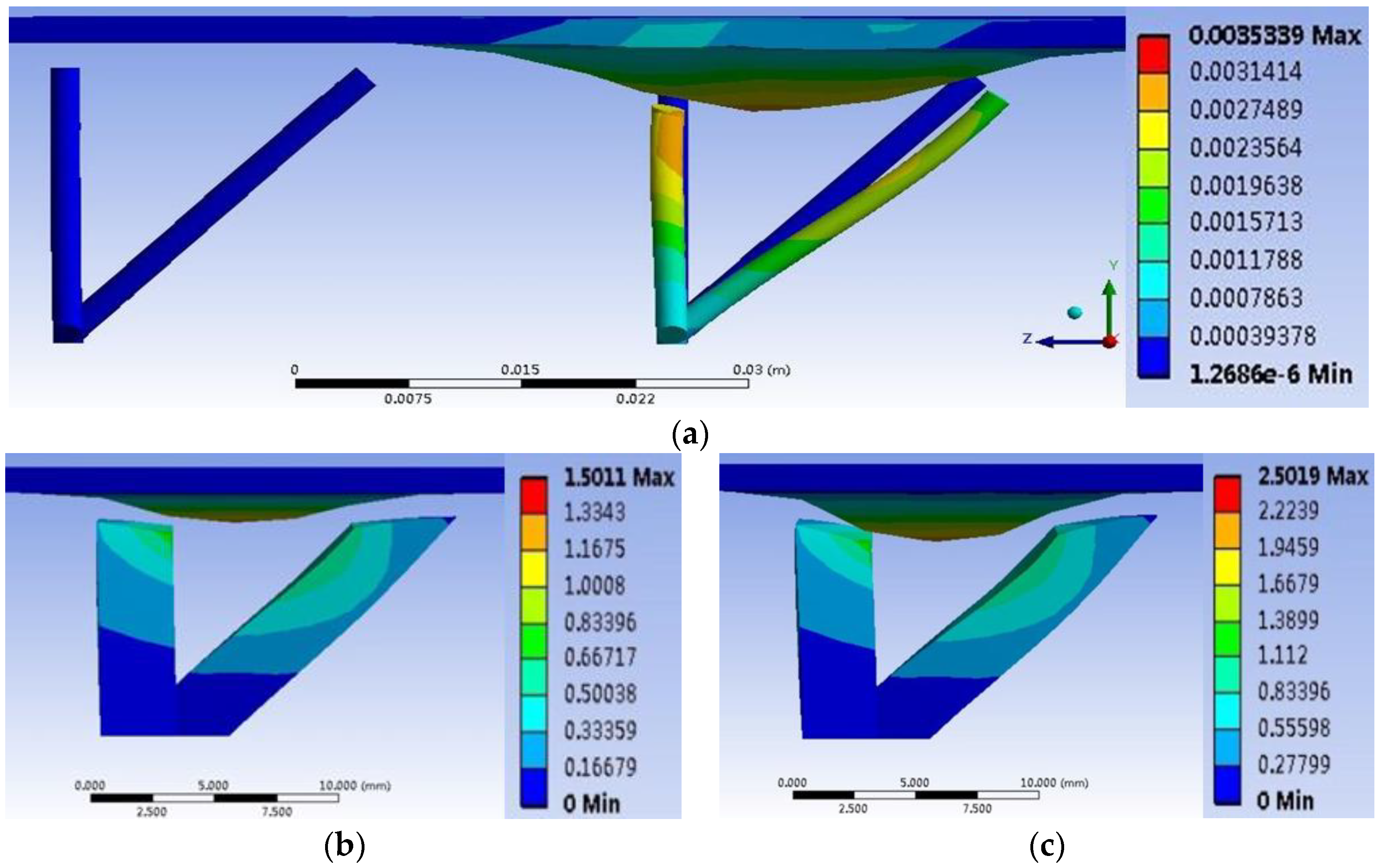
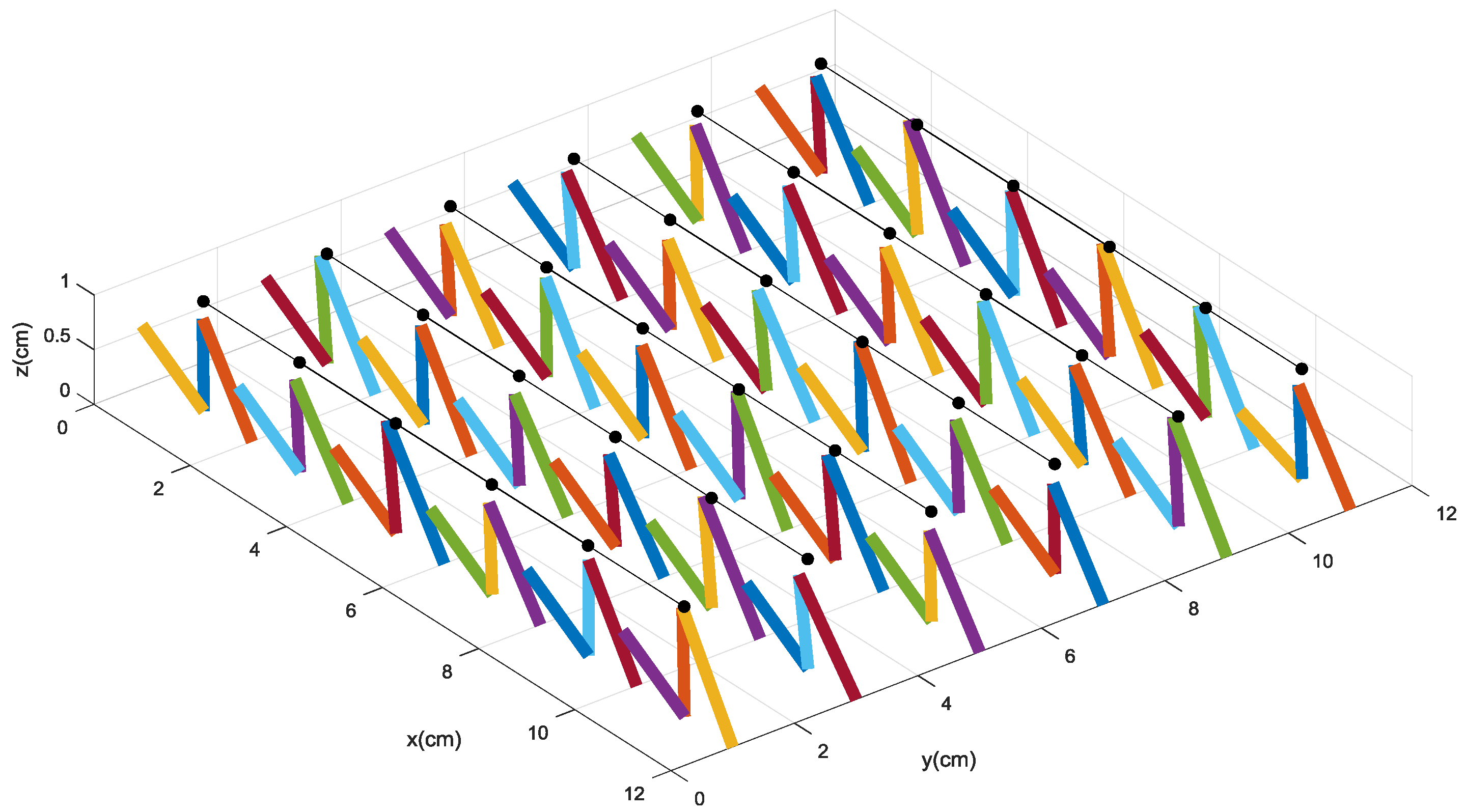
3.1. Simulation
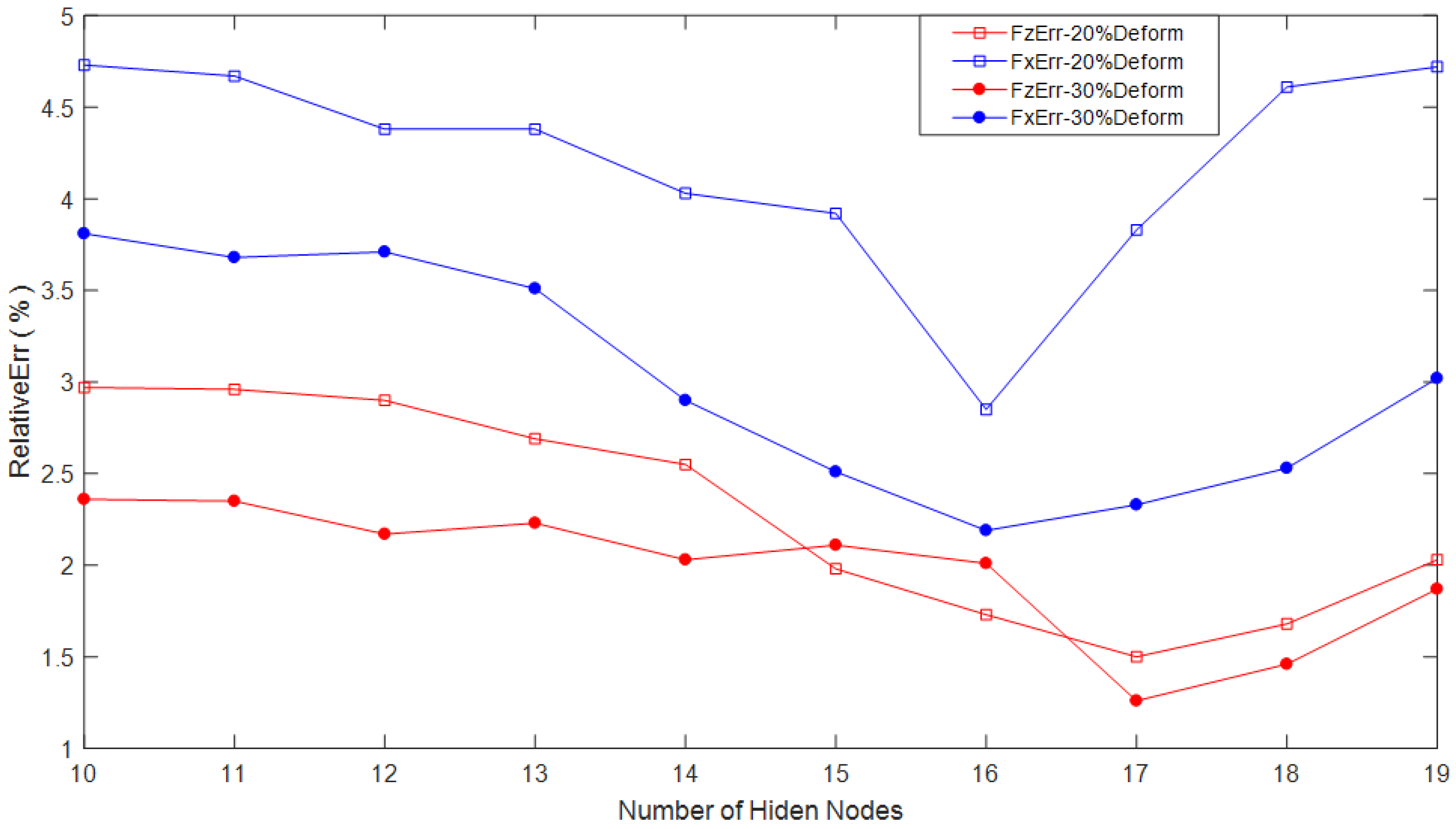
3.2. Decoupling Process of Tactile Force Based on the Improved BP Algorithm with Different Hidden Nodes
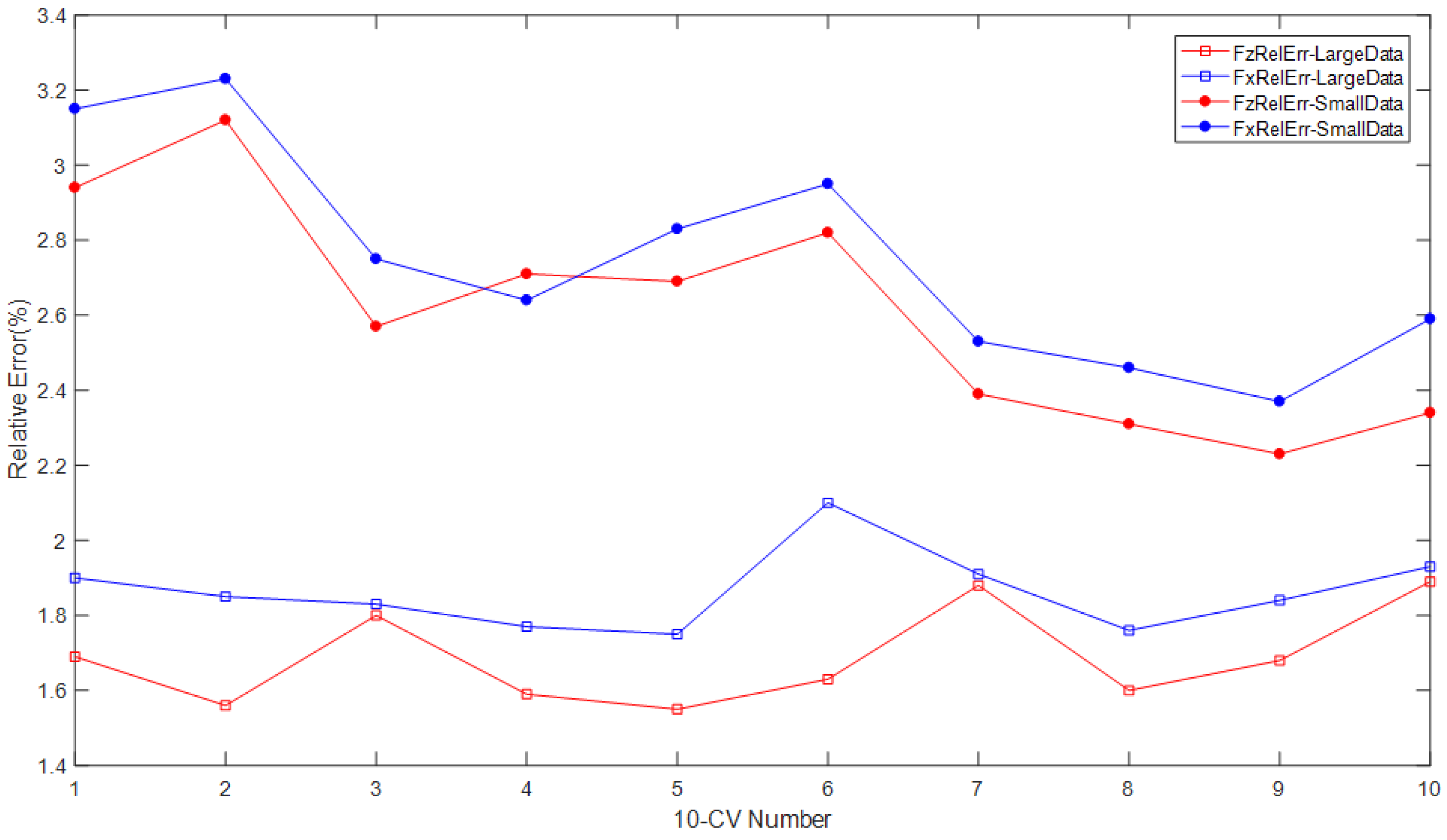
3.3. Decoupling Process for Tactile Force Based on k-Cross Validation (k-CV) Method with Different Datasets
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Kim, M.S.; Ahn, H.R.; Lee, S.; Kim, C.; Kim, Y.J. A dome-shaped piezoelectric tactile sensor arrays fabricated by an air inflation technique. Sens. Actuators A Phys. 2014, 212, 151–158. [Google Scholar] [CrossRef]
- Sumer, B.; Aksak, B.; Ssahin, K.; Chuengsatiansup, K. Piezoelectric Polymer Fiber Arrays for Tactile Sensing Applications. Sens. Lett. 2011, 9, 457–463. [Google Scholar] [CrossRef]
- Liang, G.; Wang, Y.; Mei, D.; Xi, K.; Chen, Z. Flexible Capacitive Tactile Sensor Array with Truncated Pyramids as Dielectric Layer for Three-Axis Force Measurement. J. Microelectromech. Syst. 2015, 24, 1510–1519. [Google Scholar] [CrossRef]
- Hotta, Y.; Zhang, Y.; Miki, N. A Flexible Capacitive Sensor with Encapsulated Liquids as Dielectrics. Micromachines 2012, 3, 137–149. [Google Scholar] [CrossRef]
- Maiolino, P.; Maggiali, M.; Cannata, G.; Metta, G.; Natale, L. A Flexible and Robust Large Scale Capacitive Tactile System for Robots. IEEE Sens. J. 2013, 13, 3910–3917. [Google Scholar] [CrossRef]
- Suzuki, M.; Takahashi, T.; Aoyagi, S. Flexible Tactile Sensor Using Polyurethane Thin Film. Micromachines 2012, 2, 315–324. [Google Scholar] [CrossRef]
- Pirozzi, S. Multi-Point Force Sensor Based on Crossed Optical Fibers. Sens. Actuators A Phys. 2012, 183, 1–10. [Google Scholar] [CrossRef]
- Xie, H.; Jiang, A.; Wurdemann, H.A.; Liu, H.; Seneviratne, L.D.; Althoefer, K. Magnetic Resonance-Compatible Tactile Force Sensor Using Fiber Optics and Vision Sensor. IEEE Sens. J. 2014, 14, 829–838. [Google Scholar] [CrossRef]
- Rothmaier, M.; Luong, M.P.; Clemens, F. Textile Pressure Sensor Made of Flexible Plastic Optical Fibers. Seonsors 2008, 8, 4318–4329. [Google Scholar] [CrossRef] [PubMed]
- Sekitani, T.; Noguchi, Y.; Hata, K. A rubberlike stretchable active matrix using elastic conductors. Science 2008, 321, 1468–1472. [Google Scholar] [CrossRef] [PubMed]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, B.C.; Helstrom, S.L. Skin-like pressure and strain sensors based ontransparent elastic films of carbon nanotubes. Nat. Nanotechnol. 2011, 6, 788–792. [Google Scholar] [CrossRef] [PubMed]
- Asadnia, M.; Kottapalli, A.G.P.; Mial, J.M.; Triantafyllou, M.S. Ultra-sensitive and stretchable strain sensor based on piezoelectric polymeric nanofibers. In Proceedings of the 2015 The 28th IEEE International Conference on MEMS, Estoril, Portugal, 18–22 January 2015; pp. 678–681. [Google Scholar] [CrossRef]
- Harada, S.; Kanao, K.; Yamamoto, Y.; Arie, T.; Akita, S. Fully Printed Flexible Fingerprint-like Three-Axis Tactile and Slip Force and Temperature Sensors for Artificial Skin. ACS Nano 2014, 18, 12851–12857. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Gu, C.; Zeng, R.; Yu, P.; Fu, X. A Novel Inverse Solution of Contact Force Based on a Sparse Tactile Sensor Array. Sensors 2018, 18, 351. [Google Scholar] [CrossRef]
- Cabibihan, J.J.; Carrozza, M.C. Influence of the skin thickness on tactile shape discrimination. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on BioRob, Rome, Italy, 24–27 June 2012; pp. 1681–1685. [Google Scholar]
- Cirillo, A.; Cirillo, P.; Maria, G.D.; Natale, C.; Pirozzi, S. Modeling and Calibration of a Tactile Sensor for Robust Grasping. In Proceedings of the 20th World Congress of the IFAC 2017, Toulouse, France, 14 July 2017; pp. 6843–6850. [Google Scholar]
- Mittendorer, P.; Yoshida, E.; Cheng, G. Realizing whole-body tactile interactions with a self-organizing, multi-modal artificial skin on a humanoid robot. Adv. Robot. 2015, 29, 51–67. [Google Scholar] [CrossRef]
- Wu, X.; Song, A.; Wang, Z. The Study on Static Decoupling Algorithm for Six-Axis Force Sensor and Static Calibration. Chin. J. Sens. Actuators 2013, 26, 851–856. [Google Scholar] [CrossRef]
- Lee, I.I.; Kim, M.G.; Shikida, M.; Sato, M. A Table-Shaped Tactile Sensor for Detecting Triaxial Force on the Basis of Strain Distribution. Sensors 2013, 13, 16347–16359. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Sun, X.; Feng, S. Decoupling Research of a Three-dimensional Force Tactile Sensor Based on Radical Basis Function Neural Network. Sens. Transducers 2013, 159, 289–298. [Google Scholar]
- Chen, S.; Wang, H.; Du, L.; Li, J. Research on a New Type of Overvoltages Monitoring Sensor and Decoupling Technology. IEEE Trans. Appl. Supercond. 2014, 24. [Google Scholar] [CrossRef]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, NY, USA, 1985. [Google Scholar]
- Ma, W.; Fan, E. Linear superposition principle applying to Hirota bilinear equations. Comput. Math. Appl. 2011, 61, 950–959. [Google Scholar] [CrossRef]
- Yu, B.; Wang, S.; Yang, X.; Fan, Y. BP Neural Netwok Constitutive Model Based on Optimization with Genetic Algorithm for SMA. Acta Metall. Sinica 2017, 53, 248–256. [Google Scholar] [CrossRef]
- Jiang, J. BP Neural Network Algorithm Optimized by Genetic Algorithm and Its Simulation. Int. J. Comput. Sci. Issues 2013, 10, 516–519. [Google Scholar]
- Haykin, S. Multilayer Perceptron. In Neural Networks and Learning Machines, 3rd ed.; China Machine Press: Beijing, China, 2011. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Young’s Modulus (MPa) | Poisson’s Ratio | Bulk Modulus (MPa) | Shear Modulus (MPa) |
|---|---|---|---|
| 6.1 | 0.49 | 101.67 | 2.05 |
| 10-CV | Relative Decoupling Errors of 10-CV Method | |||
|---|---|---|---|---|
| Large Dataset (2000 Samples) | Small Dataset (200 Samples) | |||
| FzRelErr (%) | FxRelErr (%) | FzRelErr (%) | FxRelErr (%) | |
| 1st | 1.80 | 2.94 | 1.90 | 3.15 |
| 2nd | 1.69 | 3.12 | 1.85 | 3.23 |
| 3rd | 1.56 | 2.57 | 1.83 | 2.75 |
| 4th | 1.59 | 2.71 | 1.77 | 2.64 |
| 5th | 1.55 | 2.69 | 1.75 | 2.83 |
| 6th | 1.63 | 2.82 | 2.10 | 2.95 |
| 7th | 1.88 | 2.39 | 1.91 | 2.53 |
| 8th | 1.60 | 2.31 | 1.77 | 2.46 |
| 9th | 1.68 | 2.23 | 1.84 | 2.37 |
| 10th | 1.89 | 2.34 | 1.93 | 2.59 |
| Average Error (%) | 1.69 | 2.61 | 1.86 | 2.75 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Wang, F.; Zhang, Z. Decoupling Research of a Novel Three-Dimensional Force Flexible Tactile Sensor Based on an Improved BP Algorithm. Micromachines 2018, 9, 236. https://doi.org/10.3390/mi9050236
Song Y, Wang F, Zhang Z. Decoupling Research of a Novel Three-Dimensional Force Flexible Tactile Sensor Based on an Improved BP Algorithm. Micromachines. 2018; 9(5):236. https://doi.org/10.3390/mi9050236
Chicago/Turabian StyleSong, Yang, Feilu Wang, and Zhenya Zhang. 2018. "Decoupling Research of a Novel Three-Dimensional Force Flexible Tactile Sensor Based on an Improved BP Algorithm" Micromachines 9, no. 5: 236. https://doi.org/10.3390/mi9050236
APA StyleSong, Y., Wang, F., & Zhang, Z. (2018). Decoupling Research of a Novel Three-Dimensional Force Flexible Tactile Sensor Based on an Improved BP Algorithm. Micromachines, 9(5), 236. https://doi.org/10.3390/mi9050236