1. Introduction
Capsule robots are swallowable, untethered, mobile microrobots employed in minimally- or non-invasive procedures, which provide a promising method for precision medicine. Conventional tools, such as endoscopes, lead to blind spots due to the convoluted nature of body cavities, which are beyond the position of their reach. These treatments, either oral or rectal, rub against the cavities’ surfaces through push and pull maneuvers, and patients bear extreme discomfort during these procedures [
1]. However, through only the simple and non-invasive swallowing of a pill and no anaesthesia, modern capsule robots offer an appealing alternative to traditional flexible endoscopy in the gastrointestinal tract (GI) [
2]. These capsule robots are able to reach narrow regions, such as the small intestine, which is not possible with conventional endoscopes. Their essentially non-invasive nature allows for less painful diagnosis. It is widely agreed that these robots will make healthcare more portable and personal. The development of capsule robots has significant potential to revolutionize treatment procedures involving different applications. For example, drugs loaded in these robots can be delivered to target lesions [
3], and some minimally invasive surgeries are able to cure diseases by simplified medical apparatus and instruments. Furthermore, the diagnostic real time data is collected and transferred out of the body for surgeons [
4].
Owing to the great potential of capsule robots, mechanisms and locomotion have been studied for decades. The earthworm-like motion, inspired by biology, has been applied to capsule robots. Kim et al. [
5,
6] have developed two prototypes; these devices propel themselves by cyclic compression/extension of shape memory alloy (SMA) spring actuators. However, intrinsic cycle time and power consumption limits of SMA actuators limit actuation efficiency and speed. A “paddling” technique where leg-like fins travel the length of the capsule is proposed by Park et al. [
7] to produce locomotion in the GI tract, where the fins retract before recycling to the front of the capsule for the next paddle stroke. This motion can obtain rapid velocity, but it cannot achieve bidirectional motion in this form. Valdastri et al. [
8,
9] developed a 12-legged capsule robot which performed fully bidirectional locomotion. This design was able to distend tissues in a uniform manner with six points of contact at each end of the capsule. A main challenge is the consideration of foot geometry for safe contact with the intestinal wall. Yim et al. [
10] proposed a magnetically actuated soft capsule endoscope as a tetherless miniature mobile robot platform for diagnostic and therapeutic medical applications inside the stomach. The distance change between the robot and permanent magnet should be compensated in real-time for further development.
A promising new approach for locomotion in the laminar regime is propeller or screw propulsion, where actuated by external magnetic field, the robots rotate inside the body tissues. Lee et al. [
11] proposed an untethered flexible-legged magnetic robot to generate effective locomotion and precision unclogging motion. The control method based on frequency has been verified by in vitro experiments. Fu and colleagues [
12] proposed a capsule robot with shrouded propeller and screw grooves rotating in a magnetic field to achieve effective propulsive performance. Moreover, the results demonstrated that the propulsive force of a shrouded propeller was larger than a bare propeller. Yu and Kim [
13] designed a robotic guidewire, which was controlled by an external rotating magnetic field. The active locomotion, steering, and towing of the guidewire and drilling was verified in a silicone oil and agar jelly. Temel et al. [
14,
15] set a computational dynamic model of untethered robots in a channel and validated it with experiments. They provided valuable insights for the design of capsule robots with geometrical parameters. To reduce fluid distorting effect, a petal-shaped capsule robot was proposed by Zhang et al. [
16,
17]. The twist impact on the GI tract by the petal-shaped capsule robot was reduced, while the non-contact driving performance in the GI tract was improved greatly isolated by fluid membrane with high dynamic pressure. Furthermore, the propulsion and swimming speed of the innovative, variable-diameter capsule robot, with radial clearance compensation based on multiple wedge effects, were significantly improved [
18]. Because of their self-propulsion and battery-free properties, capsule robots with screw structures driven by external magnetic fields are designed in this paper.
Although mechanisms and control strategies have achieved huge success, as mentioned above, and commercial capsule endoscopes are available for patients more easily, there are still some shortages for further clinical applications. On the one hand, due to the intrinsic size limitation of the swallowable capsules, an individual robot can hardly carry enough sensors and power units, which results in a lack of multifunction. Thus, commercial capsule robots are able to replace endoscopes, but have not been competent in biopsy or surgery. On the other hand, limited by space constraints of the GI tract, the poor dexterity of a simplex structure is another limitation for clinical application, as capsule robots lack the ability to interact with GI tissue [
19].
Multiple robots technology may be able to address the single function problem. Multiple robots, also called assembling reconfigurable endoluminal surgical systems (ARES) in some cases [
20], is a set of robots with different features which can realize multifunction after assembling together. A typical multiple robots set may include several robots carrying different sensors, tools or drugs. By tracing, assembly, resolution, and other motions, these multiple units detect the environments and accomplish complex manipulations. Kim et al. [
21] introduced a prototype capsule system which was designed to distribute functional burdens. These robots achieved active locomotion via a collaborative actuation. Moreover, inductive transmission techniques were used to supply power. To steer robots for endoluminal surgery, Harada et al. [
22,
23] proposed a master device, which enables surgeons to customize the surgical system. These preliminary studies have respective shortages. The robots driven by electric energy lack effective power supply units, and these robots have not been tested in liquid environments. Nagy et al. [
24,
25] proposed the use magnets in a specific configuration on the mating faces of the module. Their results showed that high success rates can be achieved and snake-type robots can adapt to irregular paths. The probability of correct alignment needs to be improved. Guo et al. [
26] proposed wireless spiral capsule robots with modular structures. Driven by electromagnetic fields, guide and auxiliary robots combine and separate via docking mechanisms. However, it is hard for magnetic fields to steer individual robots independently, because the drive frequencies of individual robots have the same range (i.e., one robot is out of control as the operator guides the other one, and they can only move in opposite directions). Zhang et al. [
27] studied the start-up curves of different robots and employed genetic algorithms to optimize screw structures to drive several capsule robots. However, the cooperative locomotion of multiple robots has not been implemented in the real world.
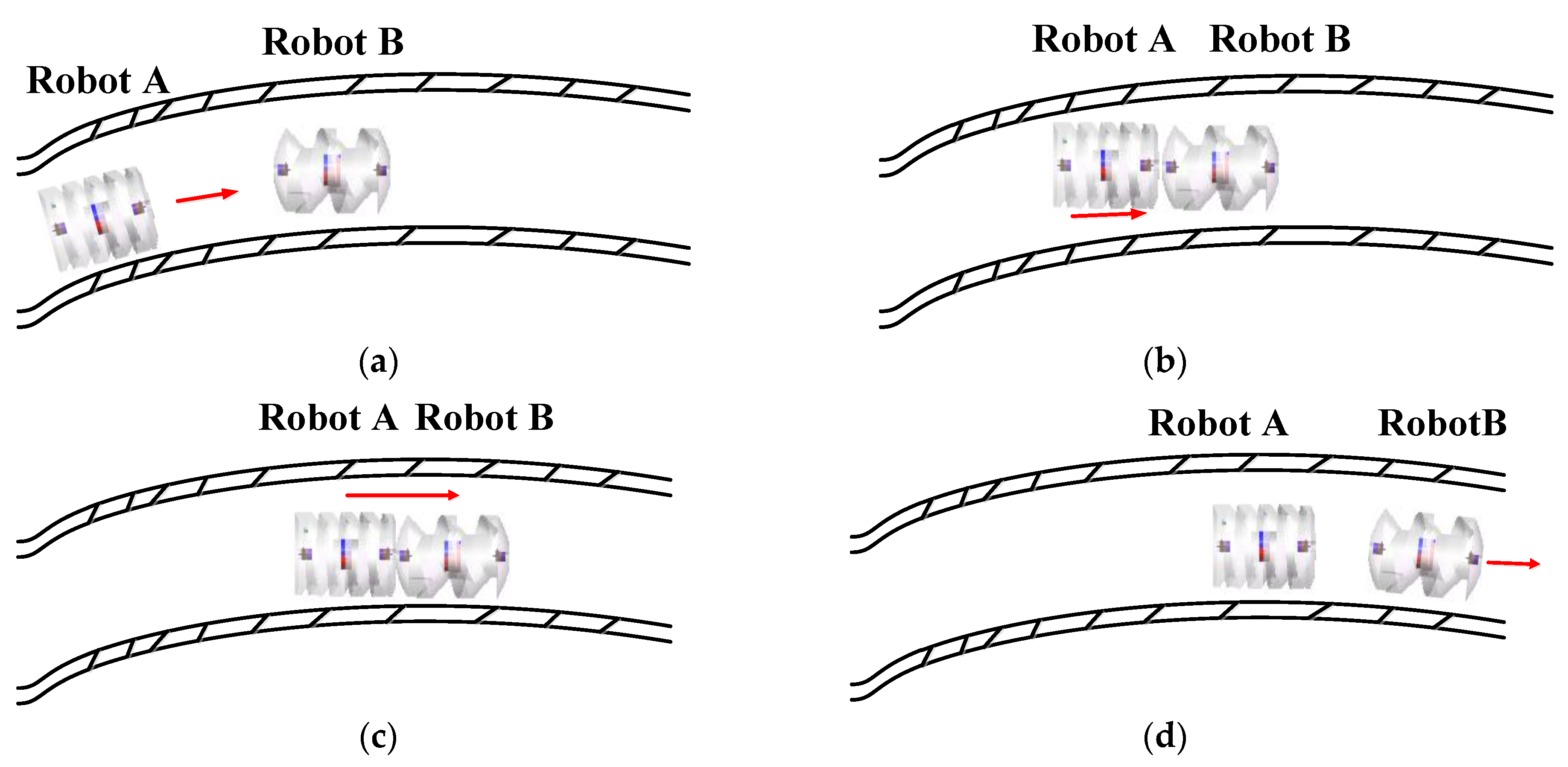
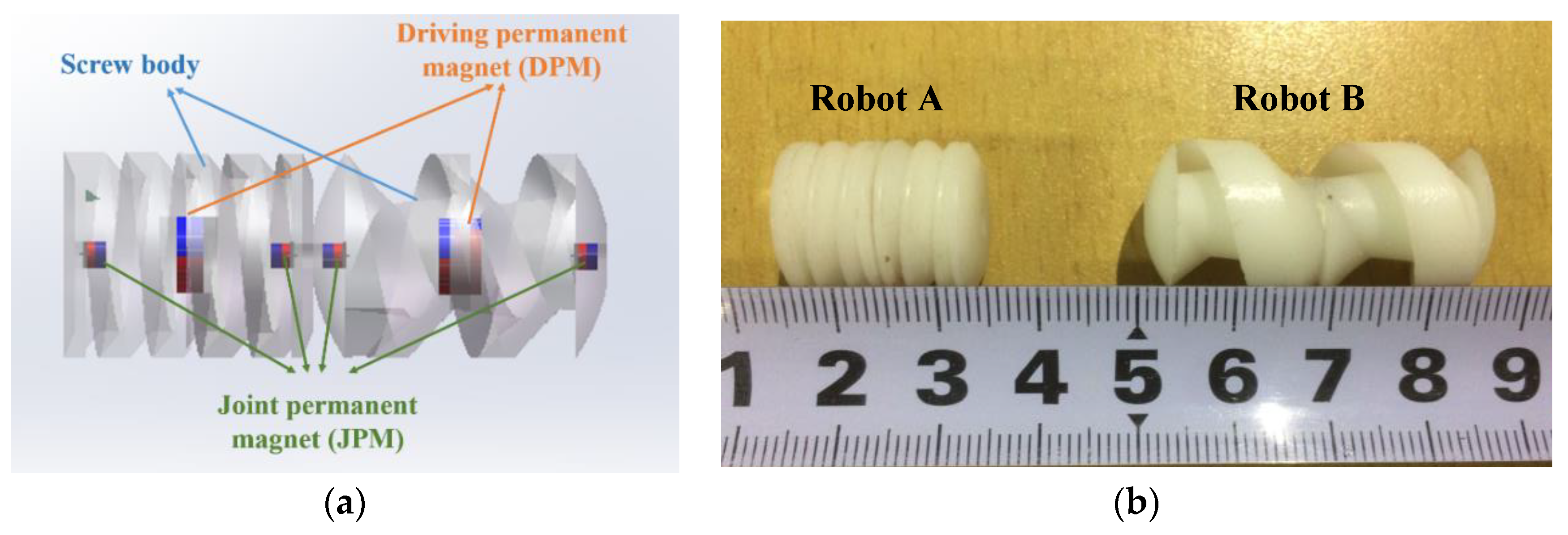
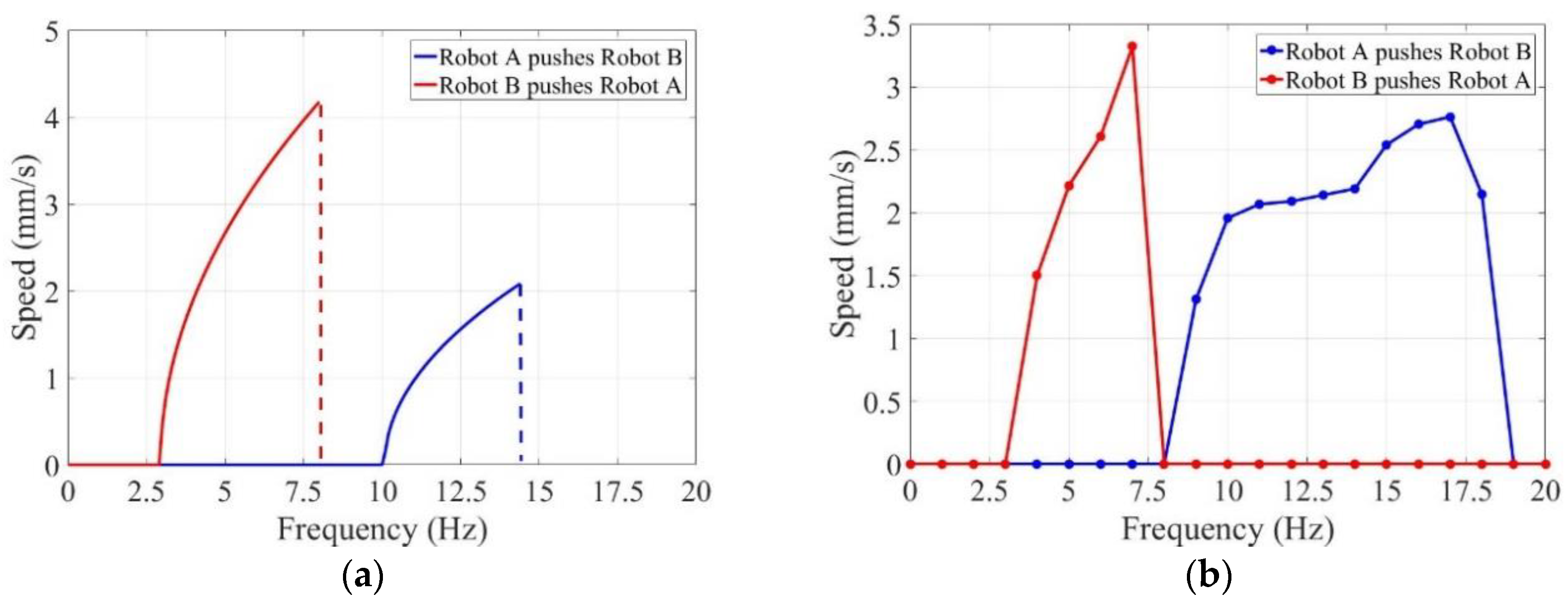
In this paper, a different-frequency driven approach for multiple capsule robots in narrow tissues of the GI tract is proposed. With an enough non-overlapping range of critical driven frequencies, multiple capsule robots can move independently as well as cooperatively under an identical electromagnetic field. Two capsule robots with screw structures and docking mechanisms are designed and fabricated. Helmholtz coils generate an electromagnetic field to steer these robots to implement linear motions. The dynamic model of the capsule robot is established and the multiple start and step-out frequencies are defined theoretically. The effectiveness of docking, release, and cooperative locomotion is validated by a series of experiments in pipe. The start frequencies of the two capsule robots have an interval of 5 Hz, and the step-out frequencies of the two robots are 19 Hz and 8 Hz, separately. The axial speeds of an individual robot peak at 4.75 mm/s and 6.35 mm/s, separately. The maximum of cooperative locomotion speed achieved is 3.32 mm/s.
This paper is organized as follows. In
Section 2, the mechanism and fabrication of multiple capsule robots and electromagnetic field design with Helmholtz coils are presented. In
Section 3, the different-frequency driven approach to steer multiple robots under an identical rotational electromagnetic field is presented, where definition of multiple start and step-out frequencies are given theoretically based on the dynamic model. The experiments and results of different motions such as docking, release, and cooperative locomotion in pipe are described in
Section 4. Finally, the conclusions and future work are summarized in
Section 5.
3. Different-Frequency Driven Approach
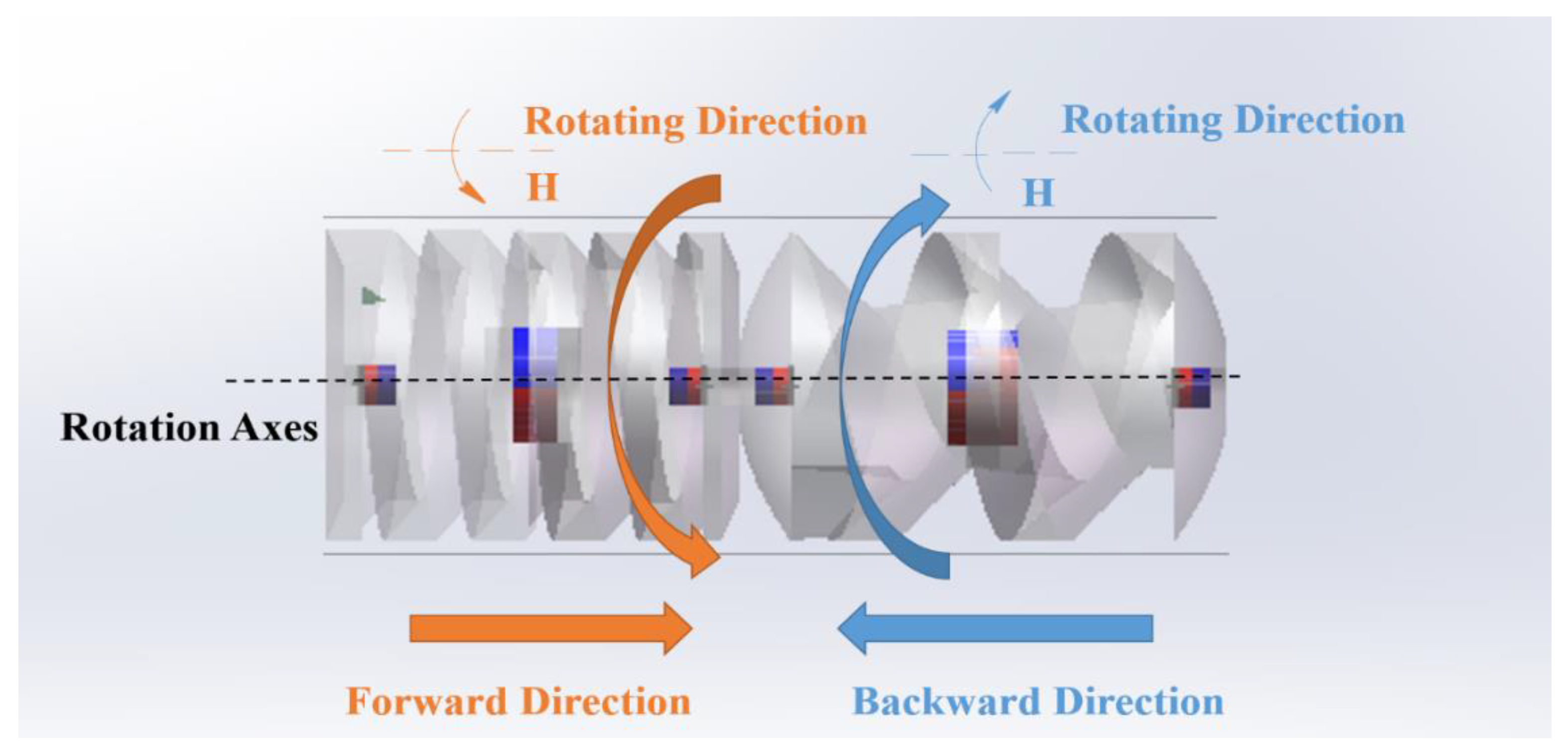
As is stated above, the screw structure outside the robotic body is significant for hydrodynamic analysis. In order to research the kinematic performance of the multiple capsule robots, a dynamic model based on geometrical parameters was set. Furthermore, the driven approach was also developed for these robots to start or stop by different frequencies.
Due to the focus on medical application, water was substituted for body fluids at the experimental stage. The Reynolds number—a dimensionless number used to characterize the fluid flow—determines the resistance of an object in liquid. The definition of a Reynolds number is:
where
and
are density and viscosity of the liquid, and
and
are velocity and length scale of the flow. In this paper, the capsule robots moved in a pipe filled with water (viscosity coefficient
). Since the practical axial speeds of the capsule robots were about 1.3 mm/s to 6.4 mm/s, and the diameter of the robots was 16 mm, the minimal and maximal Reynold numbers were 20.3 and 99.9. The environment was the laminar regime and the flow was Newtonian fluid flow.
According to Newton Viscous Law, the viscous resistance is defined by:
where
is the circumferential viscous resistance generated by the rotation motion.
is the area of the robot with relative motion, and
is the circumferential velocity gradient [
33].
The infinitesimal method (i.e., decomposing the entity into small pitches) increased the efficiency for mechanic solution. The geometrical parameters of the capsule robot are shown in
Figure 6. Picked as an infinitesimal element on the screw blade, the circumferential viscous resistance from the liquid were evaluated by the following equations:
where
and
are circumferential viscous resistance of left and right screw blade respectively.
is the area of the infinitesimal element’s trajectory when the capsule robot rotates one turn,
is the distance between the infinitesimal element on the left blade and the pipe, and
is the distance between the infinitesimal element on the right blade and the long axis. The two distances are expressed as:
where
is the radius of the capsule robot,
is the depth of the screw, and
is the radial distance between the infinitesimal element and the root of the screw. The area of the trajectory is expressed as:
where the
is the width of the infinitesimal element and
is the perimeter of the trajectory. The
is expressed as
where
is the height of the infinitesimal element and
is the blade angle. The perimeter of trajectory
is presented as:
where
is the lead angle. Furthermore, the circumferential viscous resistances acting on the crest and root of the screw are expressed as:
where
is the width of the screw,
is the angular velocity of the capsule robot,
is the rotational frequency of the robot, and
is the pitch of the screw. The total circumferential viscous resistance
and torque
of the capsule robot are expressed as:
where
is the number of screws.
In
Figure 6, the circumferential viscous resistance of screw blade
perpendicular to the paper is expressed as:
which can also be expressed as:
where
is the propulsion along the axis.
Multiple start frequency: At low frequencies, the DPMs try to rotate synchronously with rotational electromagnetic field. Rotating at a certain velocity, the capsule robot obtains an axial force while the water flows backward. The capsule robot begins to move axially only when it can overcome friction force between the pipe and the robot. For laminar flow, friction force can be calculated as:
where
and
are the gravity and buoyancy of the robot,
is the friction coefficient, and
is given as:
where
is the volume of the capsule robot.
At low driven frequencies, the capsule robot rotates to keep pace with rotational electromagnetic field. The rotational frequencies of the robot are close to the rotation frequencies of external electromagnetic field. A capsule robot is able to move axially, only when the propulsion is greater than friction force, otherwise, the capsule robot rotates at a certain angular velocity, but remains at the initial position. With the rotational frequencies increasing, the propulsion becomes larger than the friction force. Then the robot starts the axial movement. Based on this point, the rotational frequency of a capsule robot which enables it to start axial movement is defined as “start frequency”. In this paper, the start frequency of multiple capsule robots is defined as:
where
,
,
represent the start frequency of an individual robot.
Propulsion is determined by the geometrical parameters of the screw. Once the geometrical parameters are set, the start frequency is invariable. This equation shows that the propulsion is related to screw pitch, the numbers of turns, radium of the robot, the depth and width of screws, the blade angle, and the lead angle. Two robots with different start frequencies were obtained by designing these parameters. Therefore, one can move forward or backward, while the other stays in the initial position in the identical electromagnetic field.
Multiple step-out frequency: Once the capsule robot moves forward, the drag force increases as the axial speed increases. The drag force of a cylinder is defined as:
where
is the maximum cross area that is vertical to the flow of fluid and
is the resistance coefficient.
The rotational frequencies of the robot increase as the frequencies of the rotational electromagnetic field increase. The propulsion becomes larger which enables the robot to accelerate axially. The capsule robot keeps a constant speed when the propulsion is equal to the resultant force of friction force and drag force. Indeed, the maximum of axial speed is determined by the peak of rotation speed. Until the robot is not able to maintain synchronous rotation with external electromagnetic field, the axial speed of the capsule robot declines to zero rapidly. The rotational frequency of the robot which cannot hold synchronous rotation with external electromagnetic field is defined as “step-out frequency”. In this paper, the step-out frequency of multiple robots is defined as:
where
,
,
represent the step-out frequency of an individual robot.
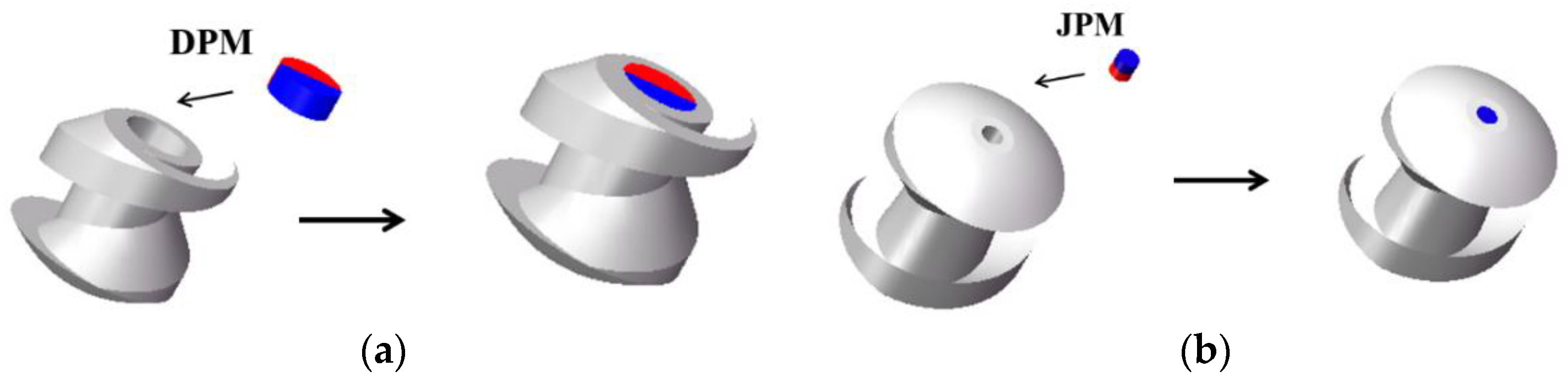
The rotation motion is controlled by the DPMs in the electromagnetic field. The magnetic force and magnetic torque of an individual DPM are given by:
where
and
are the volume and magnetization of the magnet and
is the magnetic flux density.
In a certain rotational electromagnetic field, the magnetic torque is affected by DPMs. Our approach was to change the practical torque by overlapping the DPMs with different overlap angles of two polarities. The torque is offset if the opposite polarities overlap and the torque increases as the overlap of same polarities enlarges. If the overlap angle of the same polarities is
degree, the torque of the magnetic is twice that of an individual magnet. The step-out frequency of the robot increases. However, if the opposite polarities overlap, the torque will be offset. The robot would not rotate with the external electromagnetic field, as well as move forward. The description is shown in
Figure 7. The practical torque is given by:
where
is the overlap angle of the opposite polarities.
According to Equation (14), at a certain rotational frequency , the robot is able to rotate synchronously with the rotational electromagnetic field when , otherwise the robot cannot maintain synchronous rotation and comes to a stop.
Based on the dynamic model, the axial speed of a capsule robot is expressed as:
where
is the function between axial speeds and variables such as driven frequencies and design parameters. However, some practical factors, such as vibration during rotation, collision with the pipe, and the interaction of multiple robots are not considered in this equation. So a correction factor is introduced to this model. The axial speed is then expressed as:
where
is the correction factor. Verified by some experiments,
was set at 0.5 in this paper.
The multiple capsule robots can be controlled independently under the different frequency ranges, as long as the frequency ranges have non-overlapping areas. The multiple start frequency and step-out frequency can be designed by the geometrical parameters of the robot and the overlap angles of DPMs.
5. Conclusions
In this paper, a different-frequency driven approach for the millimeter-level multiple capsule robots actuated by identical electromagnetic field is proposed. Steered by the driven frequencies in non-overlapping range, the two robots mimic the independent and cooperative locomotion in narrow tissues of the GI tract or other cavities of the human body. A dynamic model of the robots was established and the multiple start and step-out frequencies were proposed to provide the manipulation guidelines. Different critical driven frequencies can be obtained by designing the geometrical parameters of screw structure and the overlap angles of magnetic polarities. Experimental results of different motions such as docking, release, and cooperative locomotion verified the feasibility of controlling multiple capsule robots with different driven frequencies.
The start frequencies of the two robots had the interval of 5 Hz and the step-out frequencies were 19 Hz and 8 Hz, separately. The axial speeds of the individual robots peaked at 6.35 mm/s and 4.21 mm/s, respectively. The maximum of cooperative locomotion speed achieved was 3.32 mm/s. The axial speed was lower than the existing rotational robots in the laminar regime, because some of the overlapped frequencies may be discarded to keep only one robot moving. Furthermore, the ranges of driven frequencies were less than 20 Hz, which means the robots were easy to fall into a stop. These results provide significant insights for the development of multiple capsule robots for clinical applications in narrow body cavities.
In real world applications, multiple robots will break the size limitation of individual capsule robots and the space constraint of body cavities. These capsule robots can be swallowed in sequence and form new structures inside the body via docking. Multiple capsule robots with different sensors, drugs, and appliances may be competent for complex treatments such as minimally invasive surgery, and surgeons can customize treatment with different kinds of robots.
Since the dynamic model strongly relies on friction and drag force, our future work will involve collecting information of the GI tract. Besides, various structures for individual capsule robots will be designed to load different sensors, drugs, and appliances. These multiple capsule robots will be guided to form complex structure in three-dimensional space, then in vivo experiments will be conducted in porcine intestine.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}