Numerical Investigation of DC Dielectrophoretic Deformable Particle–Particle Interactions and Assembly



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
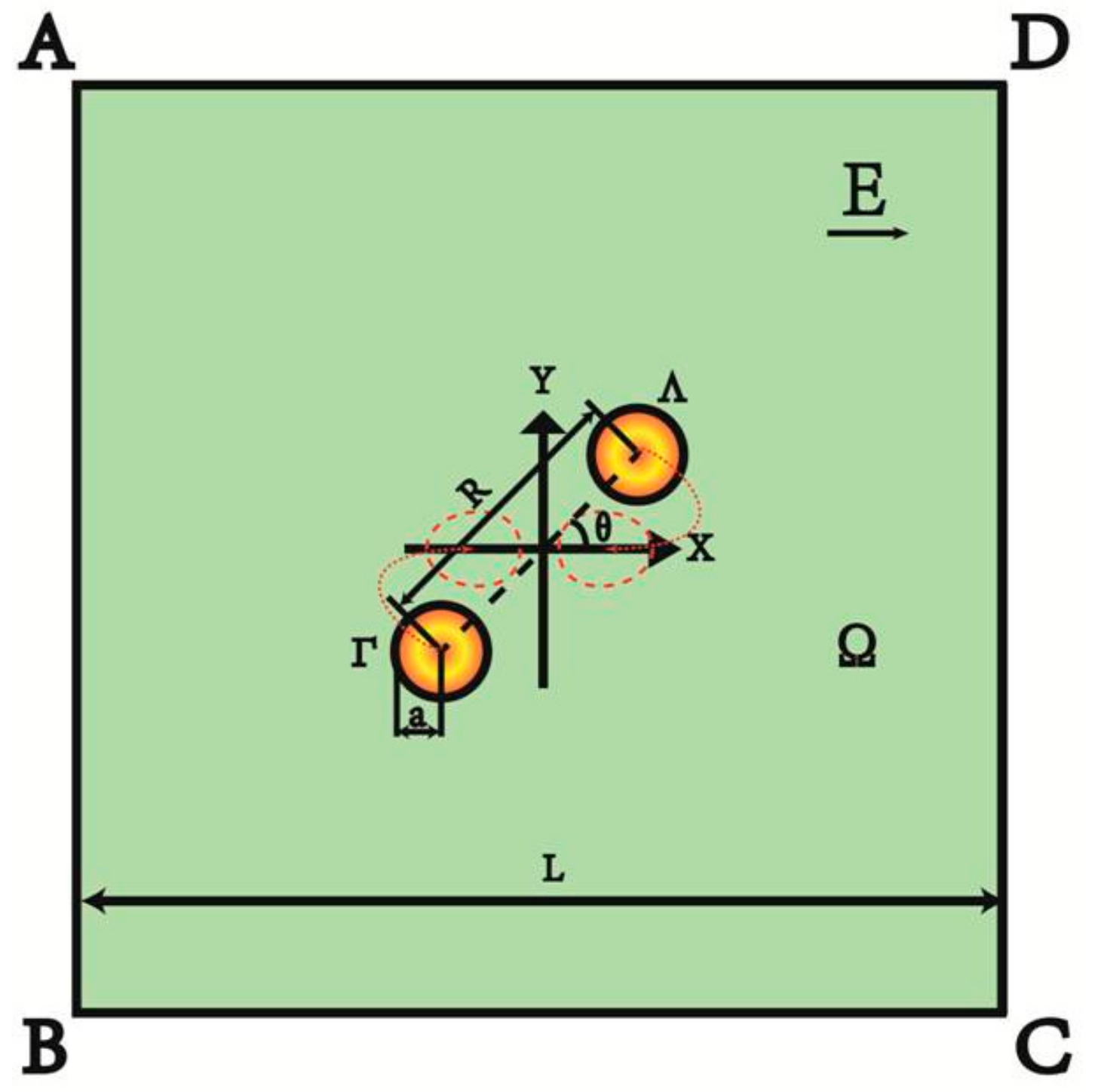
2.1. Mathematical Model
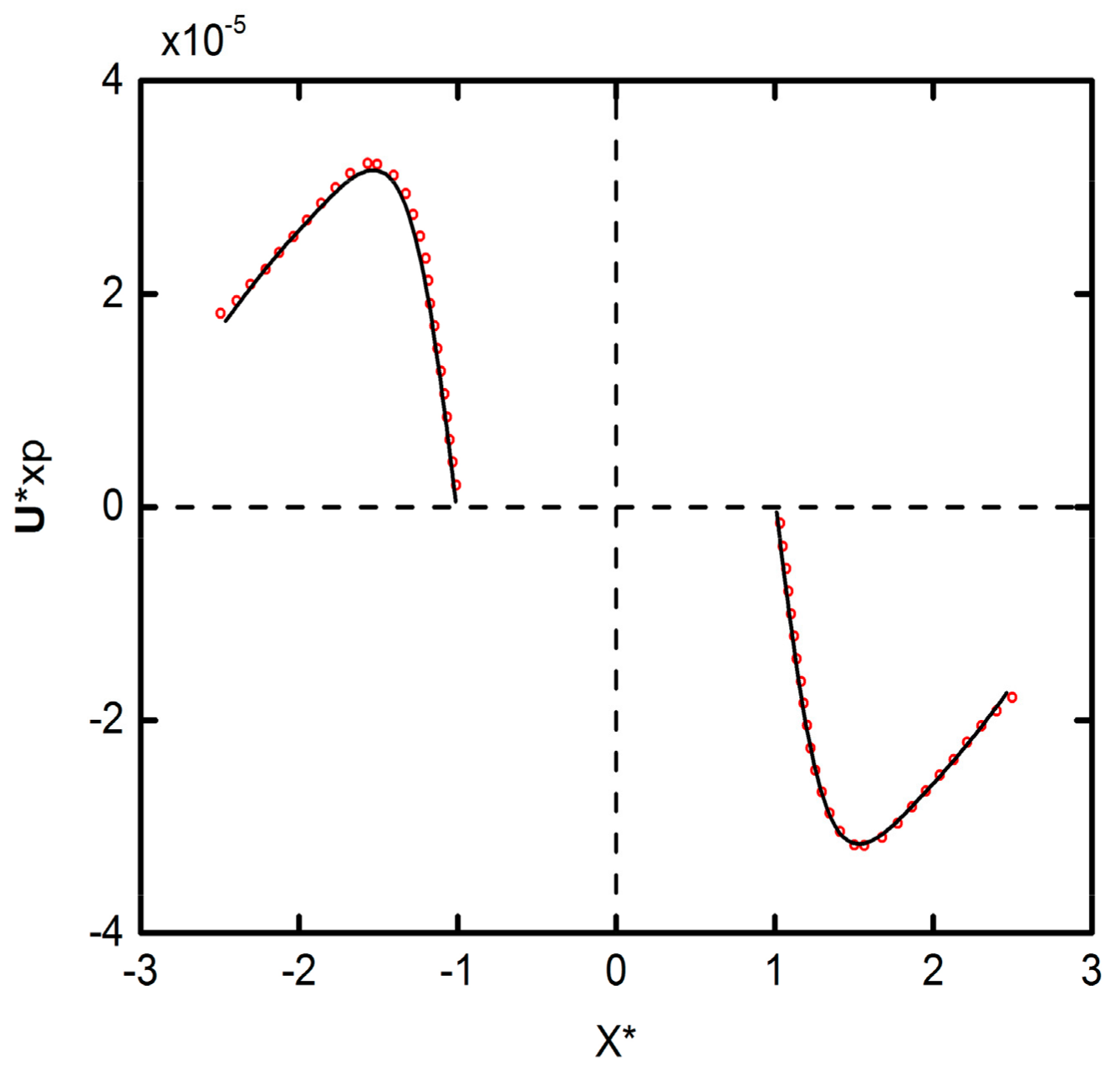
2.2. Numerical Method and Code Validation
3. Results and Discussion
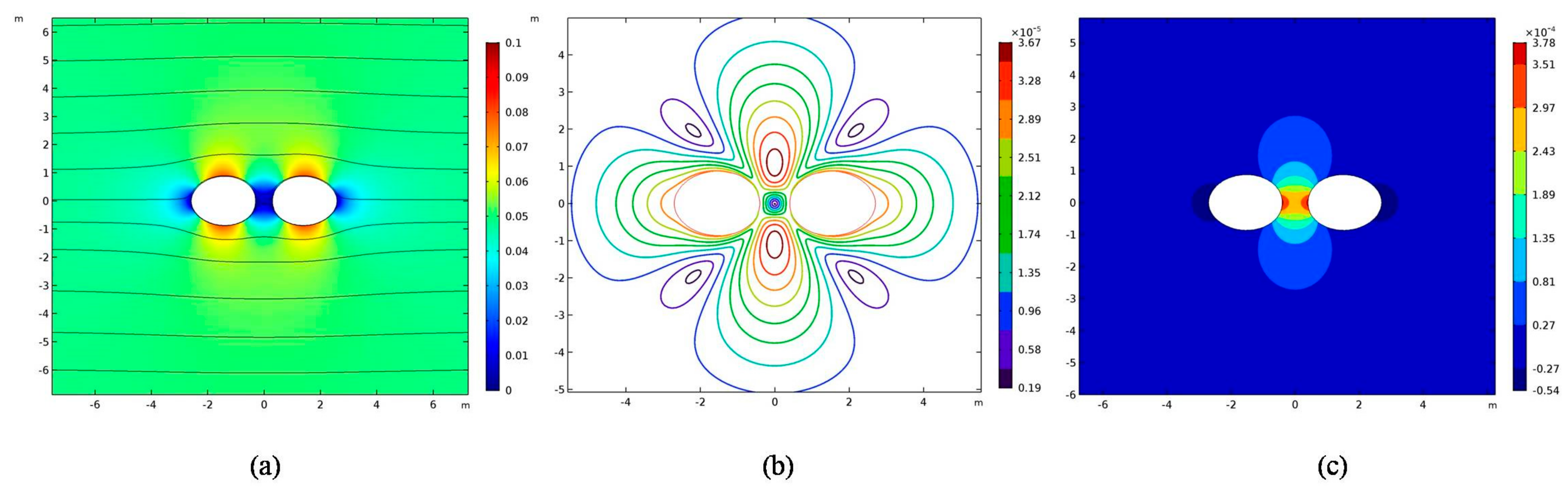
3.1. The Dielectrophoresis (DEP) Particle–Particle Interaction in the Horizontal Direction
3.2. The DEP Particle–Particle Interaction in Vertical Direction
3.3. The DEP Particle–Particle Interaction in Arbitrary Direction
3.3.1. DEP Particle–Particle Interaction: θ = 85°
3.3.2. The Influence Factors of DEP Interaction: Particle Radius
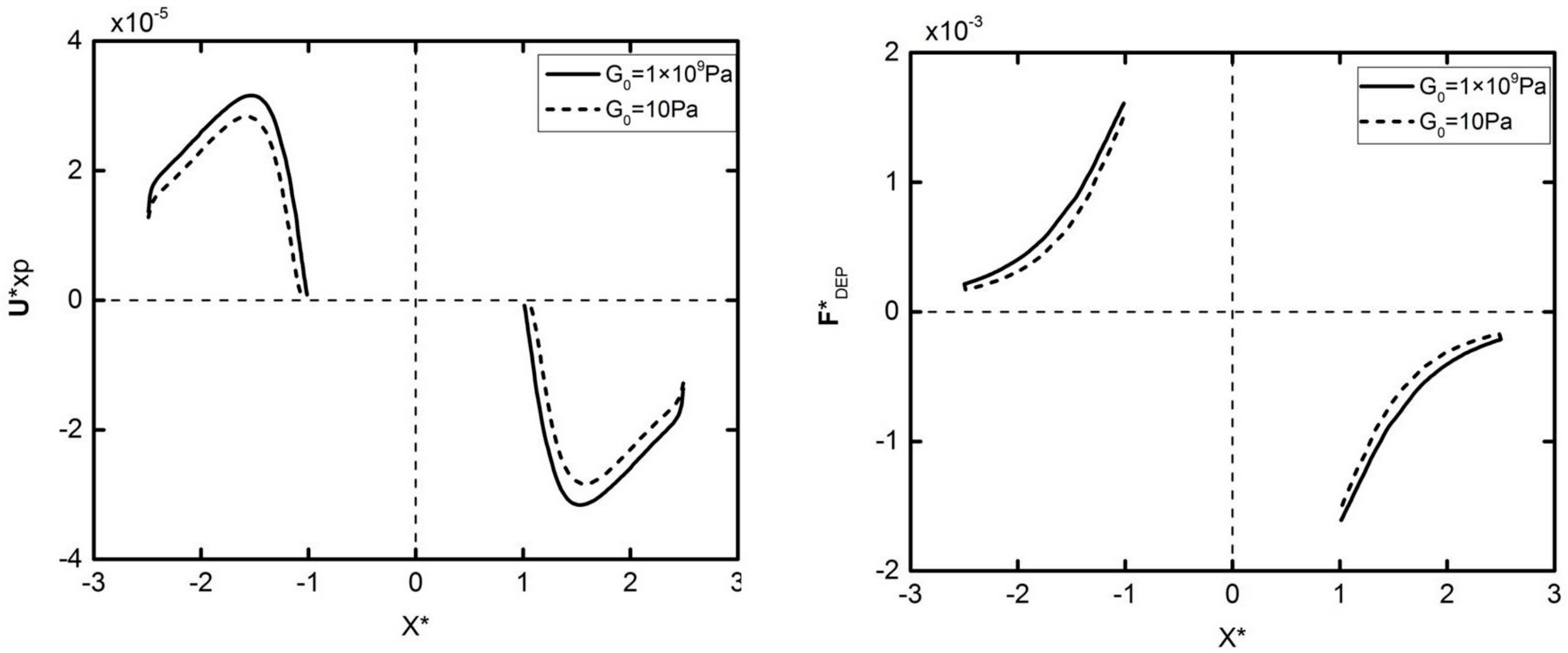
3.3.3. The Influence Factors of DEP Interaction: Electric Field Intensity
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Zhu, J.; Tzeng, T.-R.J.; Hu, G.; Xuan, X. DC dielectrophoretic focusing of particles in a serpentine microchannel. Microfluid. Nanofluid. 2009, 7, 751–756. [Google Scholar] [CrossRef]
- Xuan, X.; Xu, B.; Li, D. Accelerated particle electrophoretic motion and separation in converging-diverging microchannels. Anal. Chem. 2005, 77, 4323–4328. [Google Scholar] [CrossRef] [PubMed]
- Ai, Y.; Park, S.; Zhu, J.; Xuan, X.; Beskok, A.; Qian, S. DC electrokinetic particle transport in an L-shaped microchannel. Langmuir 2010, 26, 2937–2944. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Hsu, J.-P.; Xuan, X. Exploiting the wall-induced non-inertial lift in electrokinetic flow for a continuous particle separation by size. Langmuir 2014, 31, 620–627. [Google Scholar] [CrossRef] [PubMed]
- Xuan, X.; Zhu, J.; Church, C. Particle focusing in microfluidic devices. Microfluid. Nanofluid. 2010, 9, 1–16. [Google Scholar] [CrossRef]
- Xuan, X.; Raghibizadeh, S.; Li, D. Wall effects on electrophoretic motion of spherical polystyrene particles in a rectangular poly (dimethylsiloxane) microchannel. J. Colloid Interface Sci. 2006, 296, 743–748. [Google Scholar] [CrossRef] [PubMed]
- Ren, Y.; Liu, W.; Jia, Y.; Tao, Y.; Shao, J.; Ding, Y.; Jiang, H. Induced-charge electroosmotic trapping of particles. Lab Chip 2015, 15, 2181. [Google Scholar] [CrossRef] [PubMed]
- Yeh, L.-H.; Zhang, M.; Hu, N.; Joo, S.W.; Qian, S.; Hsu, J.-P. Electrokinetic ion and fluid transport in nanopores functionalized by polyelectrolyte brushes. Nanoscale 2012, 4, 5169–5177. [Google Scholar] [CrossRef] [PubMed]
- Qian, S.; Bau, H.H. Theoretical investigation of electro-osmotic flows and chaotic stirring in rectangular cavities. Appl. Math. Model. 2005, 29, 726–753. [Google Scholar] [CrossRef]
- Ai, Y.; Mauroy, B.; Sharma, A.; Qian, S. Electrokinetic motion of a deformable particle: Dielectrophoretic effect. Electrophoresis 2011, 32, 2282–2291. [Google Scholar] [CrossRef] [PubMed]
- Zhou, T.; Liu, Z.; Wu, Y.; Deng, Y.; Liu, Y.; Liu, G. Hydrodynamic particle focusing design using fluid-particle interaction. Biomicrofluidics 2013, 7, 054104. [Google Scholar] [CrossRef] [PubMed]
- Zhou, T.; Liu, T.; Deng, Y.; Chen, L.; Qian, S.; Liu, Z. Design of microfluidic channel networks with specified output flow rates using the cfd-based optimization method. Microfluid. Nanofluid. 2017, 21, 11. [Google Scholar] [CrossRef]
- Liang, L.; Ai, Y.; Zhu, J.; Qian, S.; Xuan, X. Wall-induced lateral migration in particle electrophoresis through a rectangular microchannel. J. Colloid Interface Sci. 2010, 347, 142–146. [Google Scholar] [CrossRef] [PubMed]
- Ai, Y.; Qian, S.; Liu, S.; Joo, S.W. Dielectrophoretic choking phenomenon in a converging-diverging microchannel. Biomicrofluidics 2010, 4, 13201. [Google Scholar] [CrossRef] [PubMed]
- Dash, S.; Mohanty, S. Dielectrophoretic separation of micron and submicron particles: A review. Electrophoresis 2014, 35, 2656–2672. [Google Scholar] [CrossRef] [PubMed]
- Jubery, T.Z.; Srivastava, S.K.; Dutta, P. Dielectrophoretic separation of bioparticles in microdevices: A review. Electrophoresis 2014, 35, 691–713. [Google Scholar] [CrossRef] [PubMed]
- Zhou, T.; Xu, Y.; Liu, Z.; Joo, S.W. An enhanced one-layer passive microfluidic mixer with an optimized lateral structure with the dean effect. J. Fluids Eng. 2015, 137, 091102. [Google Scholar] [CrossRef]
- Zhou, T.; Ge, J.; Shi, L.; Fan, J.; Liu, Z.; Woo Joo, S. Dielectrophoretic choking phenomenon of a deformable particle in a converging-diverging microchannel. Electrophoresis 2018, 39, 590–596. [Google Scholar] [CrossRef] [PubMed]
- Kale, A.; Lu, X.; Patel, S.; Xuan, X. Continuous-flow dielectrophoretic trapping and patterning of colloidal particles in a ratchet microchannel. J. Micromech. Microeng. 2014, 24, 075007. [Google Scholar] [CrossRef]
- Hossan, M.R.; Dillon, R.; Roy, A.K.; Dutta, P. Modeling and simulation of dielectrophoretic particle–particle interactions and assembly. J. Colloid Interface Sci. 2013, 394, 619. [Google Scholar] [CrossRef] [PubMed]
- Xie, C.; Chen, B.; Liu, L.; Chen, H.; Wu, J. Iterative dipole moment method for the interaction of multiple dielectrophoretic particles in an AC electrical field. Eur. J. Mech. B/Fluids 2016, 58, 50–58. [Google Scholar] [CrossRef]
- Yan, Y.; Morris, J.F.; Koplik, J. Hydrodynamic interaction of two particles in confined linear shear flow at finite reynolds number. Phys. Fluids 2007, 19, 113305. [Google Scholar] [CrossRef]
- Ai, Y.; Qian, S. DC dielectrophoretic particle–particle interactions and their relative motions. J. Colloid Interface Sci. 2010, 346, 448–454. [Google Scholar] [CrossRef] [PubMed]
- Ai, Y.; Zeng, Z.; Qian, S. Direct numerical simulation of AC dielectrophoretic particle–particle interactive motions. J. Colloid Interface Sci. 2014, 417, 72–79. [Google Scholar] [CrossRef] [PubMed]
- Kang, K.H.; Li, D. Dielectric force and relative motion between two spherical particles in electrophoresis. Langmuir 2006, 22, 1602–1608. [Google Scholar] [CrossRef] [PubMed]
- Hwang, H.; Kim, J.-J.; Park, J.-K. Experimental investigation of electrostatic particle−particle interactions in optoelectronic tweezers. J. Phys. Chem. B 2008, 112, 9903–9908. [Google Scholar] [CrossRef] [PubMed]
- Khoshmanesh, K.; Akagi, J.; Nahavandi, S.; Skommer, J.; Baratchi, S.; Cooper, J.M.; Kalantar-Zadeh, K.; Williams, D.E.; Wlodkowic, D. Dynamic analysis of drug-induced cytotoxicity using chip-based dielectrophoretic cell immobilization technology. Anal. Chem. 2011, 83, 2133–2144. [Google Scholar] [CrossRef] [PubMed]
- Zhou, T.; Yeh, L.-H.; Li, F.-C.; Mauroy, B.; Joo, S. Deformability-based electrokinetic particle separation. Micromachines 2016, 7, 170. [Google Scholar] [CrossRef]
- Krueger, T.; Holmes, D.; Coveney, P. Deformability-based red blood cell separation in deterministic lateral displacement devices-a simulation study. Biomicrofluidics 2014, 8, 054114. [Google Scholar] [CrossRef] [PubMed]
- Korin, N.; Bransky, A.; Dinnar, U. Theoretical model and experimental study of red blood cell (RBC) deformation in microchannels. J. Biomech. 2007, 40, 2088–2095. [Google Scholar] [CrossRef] [PubMed]
- Beech, J.P.; Holm, S.H.; Adolfsson, K.; Tegenfeldt, J.O. Sorting cells by size, shape and deformability. Lab Chip 2012, 12, 1048. [Google Scholar] [CrossRef] [PubMed]
- Zhou, T.; Shi, L.; Fan, C.; Liang, D.; Weng, S.; Joo, S.W. A novel scalable microfluidic load sensor based on electrokinetic phenomena. Microfluid. Nanofluid. 2017, 21, 59. [Google Scholar] [CrossRef]
- Zhou, T.; Deng, Y.; Zhao, H.; Zhang, X.; Shi, L.; Woo Joo, S. The mechanism of size-based particle separation by dielectrophoresis in the viscoelastic flows. J. Fluids Eng. 2018, 140, 091302–091306. [Google Scholar] [CrossRef]
- Soffe, R.; Tang, S.-Y.; Baratchi, S.; Nahavandi, S.; Nasabi, M.; Cooper, J.M.; Mitchell, A.; Khoshmanesh, K. Controlled rotation and vibration of patterned cell clusters using dielectrophoresis. Anal. Chem. 2015, 87, 2389–2395. [Google Scholar] [CrossRef] [PubMed]











© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, X.; Xu, L.; Zhou, T.; Shi, L.; Deng, Y.; Li, J. Numerical Investigation of DC Dielectrophoretic Deformable Particle–Particle Interactions and Assembly. Micromachines 2018, 9, 260. https://doi.org/10.3390/mi9060260
Ji X, Xu L, Zhou T, Shi L, Deng Y, Li J. Numerical Investigation of DC Dielectrophoretic Deformable Particle–Particle Interactions and Assembly. Micromachines. 2018; 9(6):260. https://doi.org/10.3390/mi9060260
Chicago/Turabian StyleJi, Xiang, Li Xu, Teng Zhou, Liuyong Shi, Yongbo Deng, and Jie Li. 2018. "Numerical Investigation of DC Dielectrophoretic Deformable Particle–Particle Interactions and Assembly" Micromachines 9, no. 6: 260. https://doi.org/10.3390/mi9060260
APA StyleJi, X., Xu, L., Zhou, T., Shi, L., Deng, Y., & Li, J. (2018). Numerical Investigation of DC Dielectrophoretic Deformable Particle–Particle Interactions and Assembly. Micromachines, 9(6), 260. https://doi.org/10.3390/mi9060260