Elucidating the Mechanisms of Two Unique Phenomena Governed by Particle-Particle Interaction under DEP: Tumbling Motion of Pearl Chains and Alignment of Ellipsoidal Particles


Abstract
:1. Introduction
2. Experimental Setup and Observation
2.1. Experimental Setup
2.2. Experimental Observation
3. Theoretical Development
3.1. VPI Method (for Spherical and Non-Spherical Particles)
3.2. Coupled ALE-VPI Method (for Spherical Particle)
4. Numerical Implementation
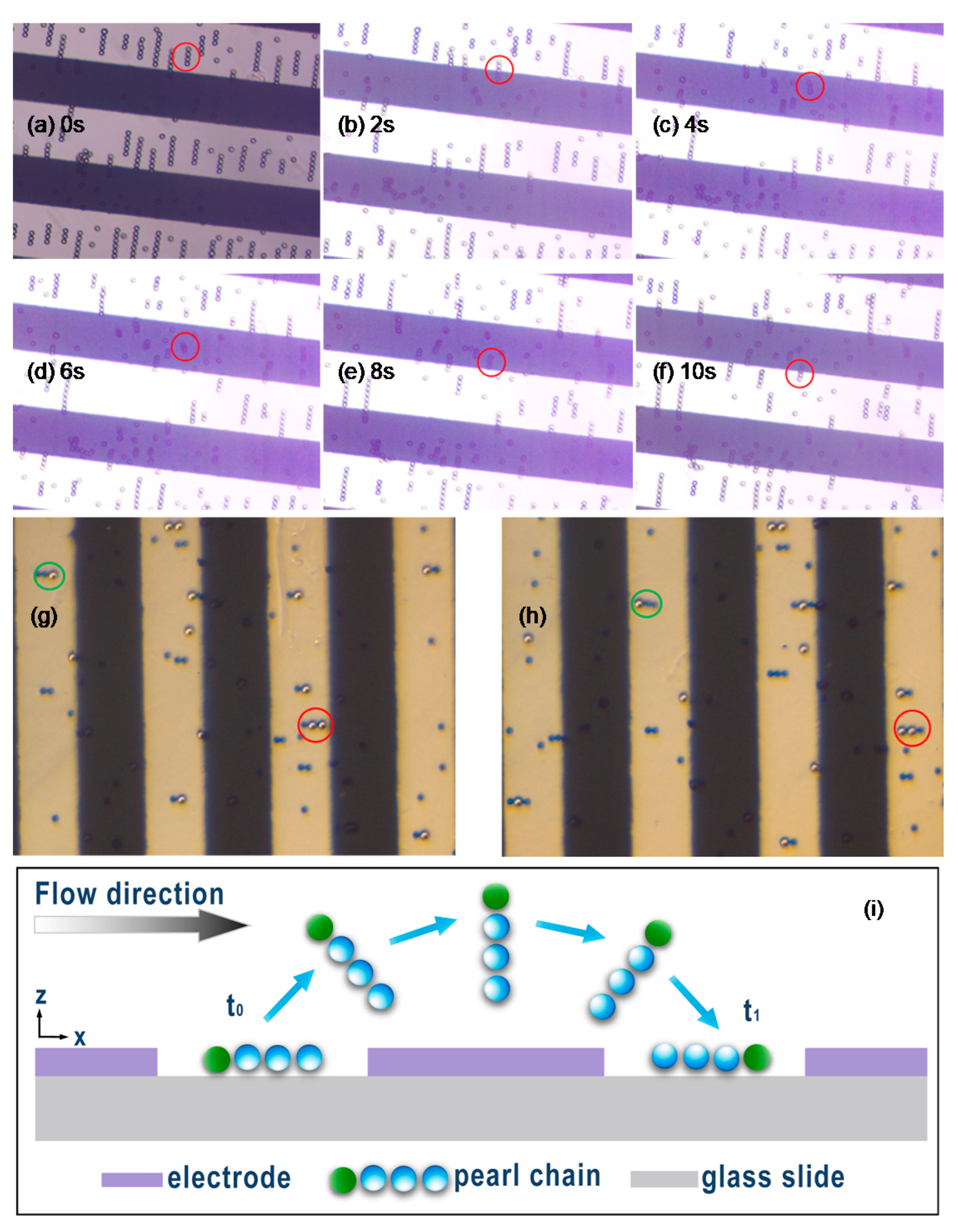
4.1. Tumbling Motion of Pearl Chains of Particles in a Flow Condition
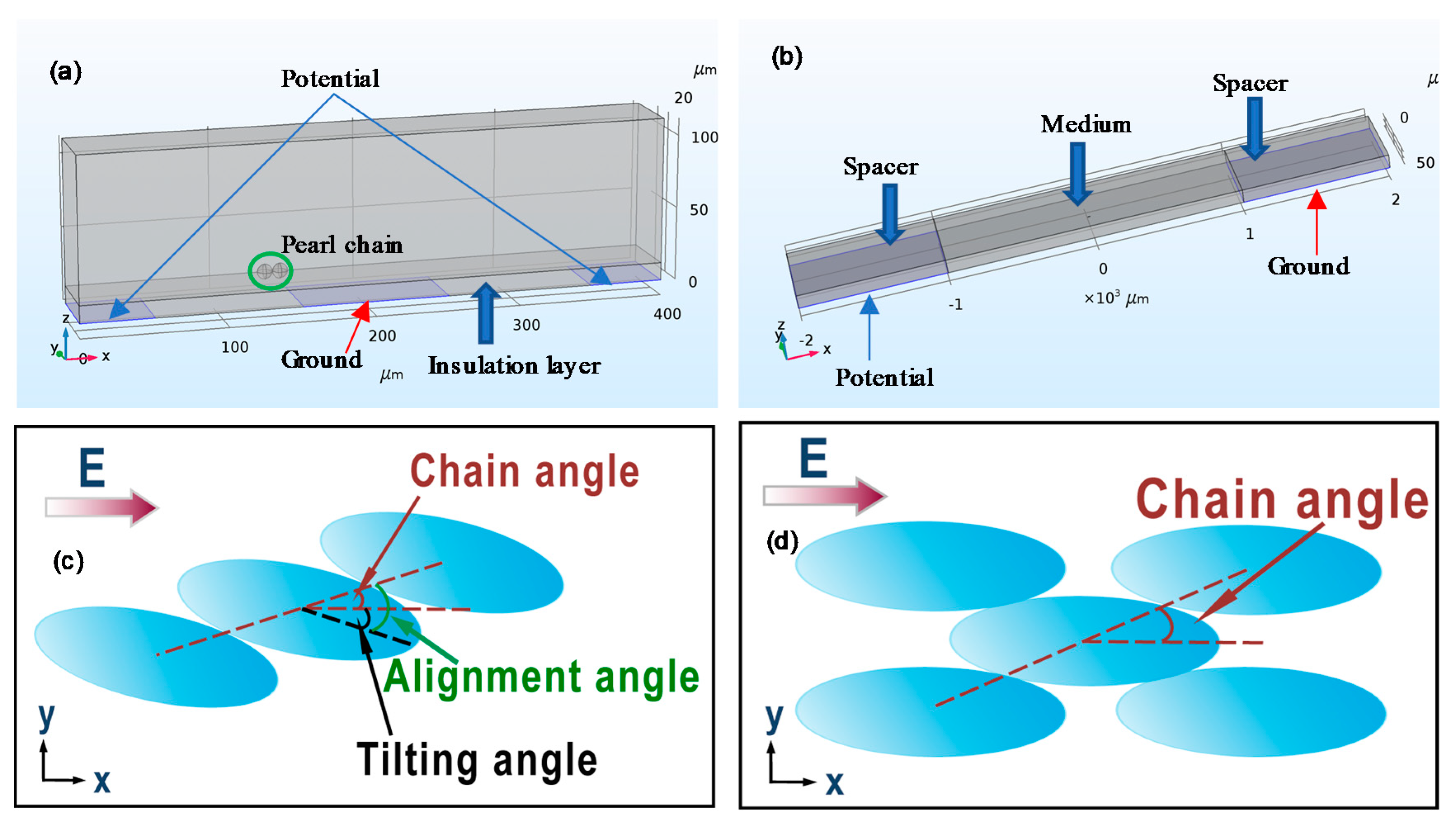
4.2. Ellipsoidal Particle Alignment
4.2.1. Validation of VPI Expressions of Electrostatic Potential Energy and Torque
4.2.2. Determination of the Stable Orientation of the Ellipsoidal Particle Chain
5. Results and Discussion
5.1. Tumbling Motion of Pearl Chains of Particles in a Flow Condition
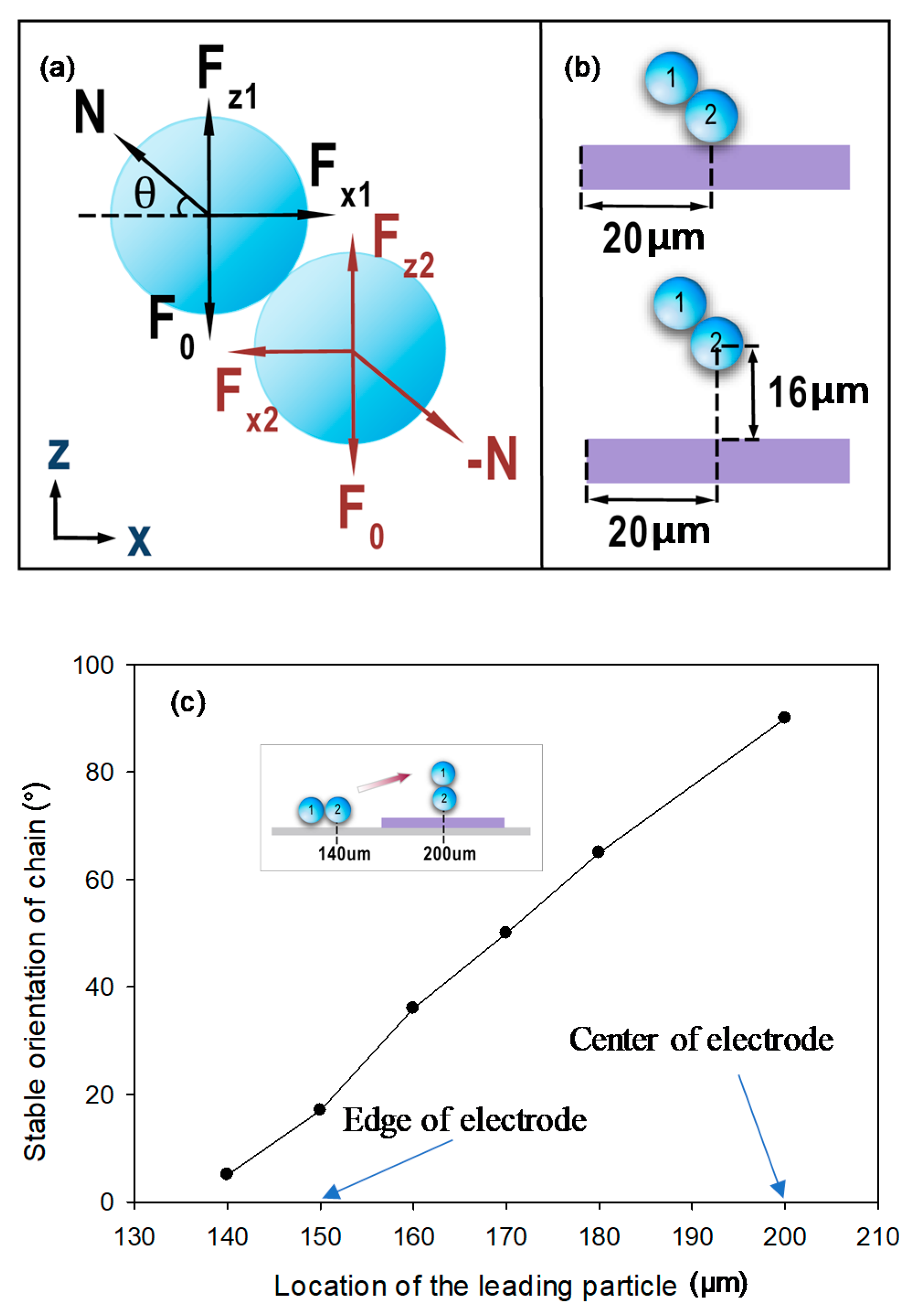
5.1.1. Static Force Analysis
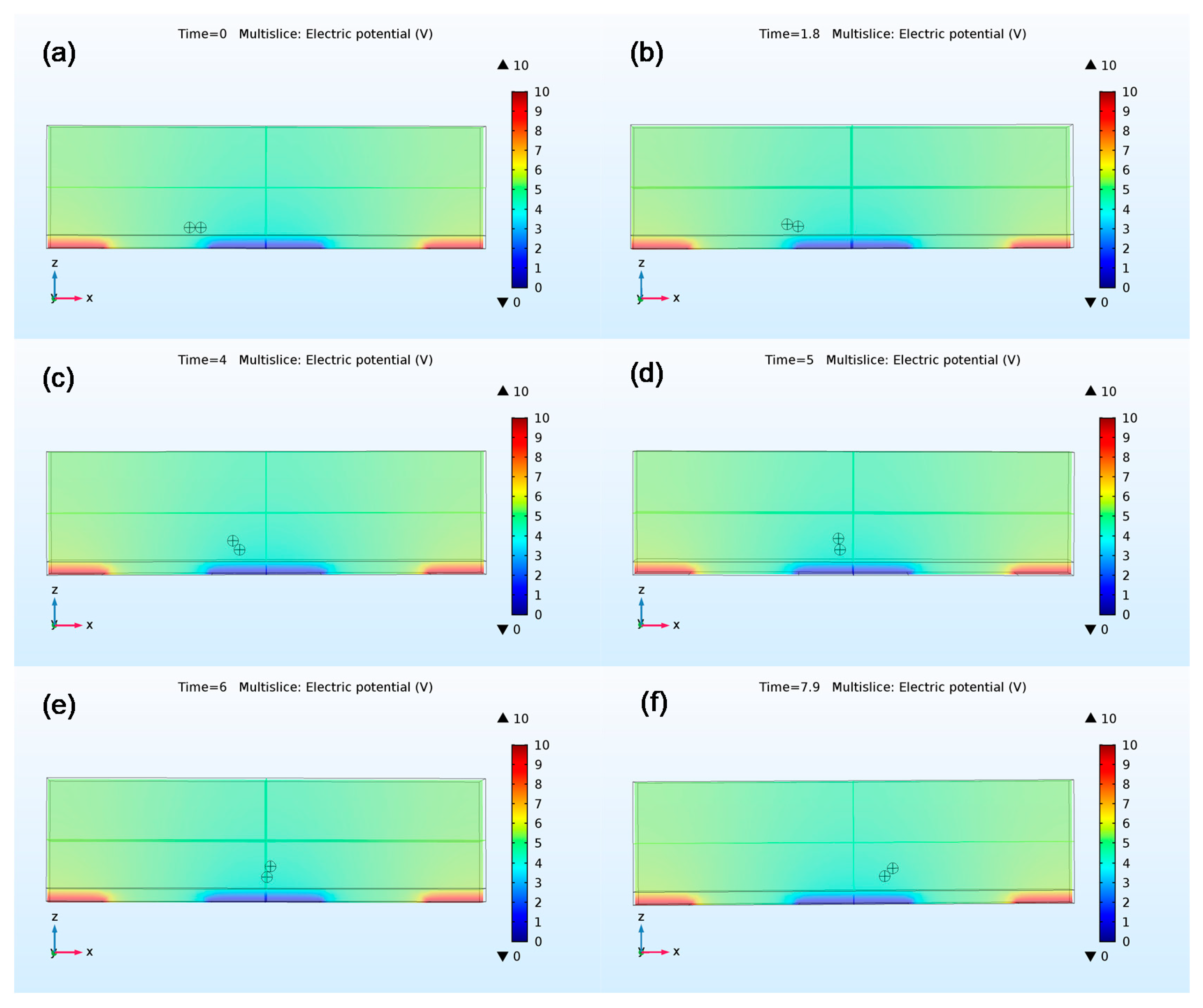
5.1.2. Coupled ALE-VPI Method
5.2. Ellipsoidal Particle Alignment
5.2.1. Validation of VPI Expressions of Electrostatic Potential Energy and Torque
5.2.2. Determination of the Stable Orientation of Ellipsoidal Particle Chain
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Church, C.; Zhu, J.; Xuan, X. Negative dielectrophoresis-based particle separation by size in a serpentine microchannel. Electrophoresis 2011, 32, 527–531. [Google Scholar] [CrossRef] [PubMed]
- Kang, Y.; Li, D.; Kalams, S.A.; Eid, J.E. DC-Dielectrophoretic separation of biological cells by size. Biomed. Microdevices 2008, 10, 243–249. [Google Scholar] [CrossRef] [PubMed]
- Lapizco-Encinas, B.H.; Simmons, B.A.; Cummings, E.B.; Fintschenko, Y. Dielectrophoretic Concentration and Separation of Live and Dead Bacteria in an Array of Insulators. Anal. Chem. 2004, 76, 1571–1579. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Li, S.; Li, W.; Wen, W.; Alici, G. Continuous manipulation and separation of particles using combined obstacle- and curvature-induced direct current dielectrophoresis. Electrophoresis 2013, 34, 952–960. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moon, H.S.; Kwon, K.; Kim, S.I.; Han, H.; Sohn, J.; Lee, S.; Jung, H.I. Continuous separation of breast cancer cells from blood samples using multi-orifice flow fractionation (MOFF) and dielectrophoresis (DEP). Lab Chip 2011, 11, 1118–1125. [Google Scholar] [CrossRef] [PubMed]
- Ho, C.T.; Lin, R.Z.; Chang, W.Y.; Chang, H.Y.; Liu, C.H. Rapid heterogeneous liver-cell on-chip patterning via the enhanced field-induced dielectrophoresis trap. Lab Chip 2006, 6, 724–734. [Google Scholar] [CrossRef] [PubMed]
- Ho, C.T.; Lin, R.Z.; Chen, R.J.; Chin, C.K.; Gong, S.E.; Chang, H.Y.; Peng, H.L.; Hsu, L.; Yew, T.R.; Chang, S.F.; et al. Liver-cell patterning lab chip: Mimicking the morphology of liver lobule tissue. Lab Chip 2013, 13, 3578–3587. [Google Scholar] [CrossRef] [PubMed]
- Gel, M.; Kimura, Y.; Kurosawa, O.; Oana, H.; Kotera, H.; Washizu, M. Dielectrophoretic cell trapping and parallel one-to-one fusion based on field constriction created by a micro-orifice array. Biomicrofluidics 2010, 4, 022808. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kimura, Y.; Gel, M.; Techaumnat, B.; Oana, H.; Kotera, H.; Washizu, M. Dielectrophoresis-assisted massively parallel cell pairing and fusion based on field constriction created by a micro-orifice array sheet. Electrophoresis 2011, 32, 2496–2501. [Google Scholar] [CrossRef] [PubMed]
- Kadaksham, J.; Singh, P.; Aubry, N. Manipulation of particles using dielectrophoresis. Mech. Res. Commun. 2006, 33, 108–122. [Google Scholar] [CrossRef]
- Ai, Y.; Qian, S. DC dielectrophoretic particle-particle interactions and their relative motions. J. Colloid Interface Sci. 2010, 346, 448–454. [Google Scholar] [CrossRef] [PubMed]
- Ai, Y.; Zeng, Z.; Qian, S. Direct numerical simulation of AC dielectrophoretic particle-particle interactive motions. J. Colloid Interface Sci. 2014, 417, 72–79. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Brcka, J.; Faguet, J.; Zhang, G. Elucidating the DEP phenomena using a volumetric polarization approach with consideration of the electric double layer. Biomicrofluidics 2017, 11, 024106. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Singh, J.P.; Lele, P.P.; Nettesheim, F.; Wagner, N.J.; Furst, E.M. One-and two-dimensional assembly of colloidal ellipsoids in ac electric fields. Phys. Rev. E 2009, 79, 050401. [Google Scholar] [CrossRef] [PubMed]
- House, D.L.; Luo, H.; Chang, S. Numerical study on dielectrophoretic chaining of two ellipsoidal particles. J. Colloid Interface Sci. 2012, 374, 141–149. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.M.; Shah, S.S. Determination of critical micelle concentration (CMC) of sodium dodecyl sulfate (SDS) and the effect of low concentration of pyrene on its CMC using ORIGIN software. J. Chem. Soc. Pakistan 2008, 30, 186–191. [Google Scholar]
- Arnold, W.M.; Schwan, H.P.; Zimmermann, U. Surface conductance and other properties of latex particles measured by electrorotation. J. Phys. Chem. 1987, 91, 5093–5098. [Google Scholar] [CrossRef]
- Jones, T.B. Basic theory of dielectrophoresis and electrorotation. IEEE Eng. Med. Biol. 2003, 22, 33–42. [Google Scholar] [CrossRef]
- Mittal, M.; Furst, E.M. Electric Field-Directed Convective Assembly of Ellipsoidal Colloidal Particles to Create Optically and Mechanically Anisotropic Thin Films. Adv. Funct. Mater. 2009, 19, 3271–3278. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Physical Meaning | Value |
|---|---|---|
| k | Coefficient of normal force | 10−12 N/µm |
| th | Thickness of insulation layer | 12 µm |
| l | A small value to characterize normal force change | 1 µm |
| ρparticle | The density of particle | 1050 kg/m3 |
| ρfluid | The density of fluid | 1000 kg/m3 |
| η | Dynamic viscosity | 10−3 Pa·s |
| 𝜎p | Conductivity of particle | 5 × 10−4 S/m |
| 𝜎m | Conductivity of fluid | 1.8 × 10−4 S/m |
| 𝜀m | Permittivity of fluid | 78.5 |
| 𝜀p | Permittivity of particle | 2.5 |
| θ | Fx1 (10−13 N) | Fx2 (10−13 N) | Fz1 (10−13 N) | Fz2 (10−13 N) |
| 0 | −3.12 | 6.50 | 16.7 | 3.25 × 10−2 |
| 11.25 | 2.40 | 0.299 | 14.8 | −0.353 |
| 22.5 | 6.49 | −4.25 | 10.8 | 2.16 |
| 33.75 | 8.28 | −6.24 | 5.72 | 6.12 |
| 45 | 7.70 | −5.63 | 1.07 | 10.1 |
| 56.25 | 5.28 | −3.00 | −2.17 | 13.0 |
| 67.5 | 1.94 | 0.683 | −3.42 | 14.0 |
| 78.75 | −1.33 | 4.32 | −2.60 | 13.0 |
| θ | Fx1 − Fx2 (10−13 N) | N (10−13 N) | Fz1 + N × sin θ (10−13 N) | Fz2 − N × sin θ (10−13 N) |
| 0 | −9.61 | −4.81 | 16.7 | 3.25 × 10−2 |
| 11.25 | 2.10 | 1.07 | 15.0 | −0.562 |
| 22.5 | 10.7 | 5.81 | 13.0 | −6.56 × 10-2 |
| 33.75 | 14.5 | 8.73 | 10.6 | 1.27 |
| 45 | 13.3 | 9.42 | 7.73 | 3.44 |
| 56.25 | 8.28 | 7.45 | 4.02 | 6.79 |
| 67.5 | 1.26 | 1.64 | −1.90 | 12.5 |
| 78.75 | −5.64 | −14.5 | −16.8 | 27.2 |
| θ | Fx1 (10−13 N) | Fx2 (10−13 N) | Fz1 (10−13 N) | Fz2 (10−13 N) |
| 0 | −0.700 | 1.39 | 6.90 | −0.354 |
| 11.25 | 1.78 | −1.13 | 6.22 | −0.185 |
| 22.5 | 3.62 | −3.00 | 4.37 | 1.23 |
| 33.75 | 4.32 | −3.68 | 2.02 | 3.25 |
| 45 | 3.83 | −3.12 | −0.134 | 5.20 |
| 47.81 | 3.56 | −2.82 | −0.569 | 5.61 |
| 50.63 | 3.23 | −2.46 | −0.951 | 5.97 |
| 53.44 | 2.86 | −2.06 | −1.28 | 6.27 |
| θ | Fx1 − Fx2 (10−13 N) | N (10−13 N) | Fz1 + N × sin θ (10−13 N) | Fz2 − N × sin θ (10−13 N) |
| 0 | −2.09 | −1.04 | 6.90 | −0.354 |
| 11.25 | 2.91 | 1.49 | 6.51 | −0.474 |
| 22.5 | 6.62 | 3.58 | 5.74 | −0.144 |
| 33.75 | 8.00 | 4.81 | 4.69 | 0.579 |
| 45 | 6.95 | 4.91 | 3.34 | 1.73 |
| 47.81 | 6.38 | 4.75 | 2.95 | 2.09 |
| 50.63 | 5.69 | 4.49 | 2.52 | 2.50 |
| 53.44 | 4.92 | 4.13 | 2.04 | 2.96 |
| Aspect ratio | Most Probable Chain Angle (Modeling) | Most Probable Chain Angle (Experiment) |
|---|---|---|
| 3 | 6.5° | 13° |
| 4.3 | 5° | 12° |
| 7.6 | 3° | 12° |
| Aspect ratio | Distribution of Chain Angle (Modeling) | Distribution of Chain Angle (Experiment) |
|---|---|---|
| 3 | −6°–26° | 4°–32° |
| 4.3 | −4°–20.5° | 4°–26° |
| 7.6 | −2°–13° | 4°–20° |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Brcka, J.; Faguet, J.; Zhang, G. Elucidating the Mechanisms of Two Unique Phenomena Governed by Particle-Particle Interaction under DEP: Tumbling Motion of Pearl Chains and Alignment of Ellipsoidal Particles. Micromachines 2018, 9, 279. https://doi.org/10.3390/mi9060279
Zhao Y, Brcka J, Faguet J, Zhang G. Elucidating the Mechanisms of Two Unique Phenomena Governed by Particle-Particle Interaction under DEP: Tumbling Motion of Pearl Chains and Alignment of Ellipsoidal Particles. Micromachines. 2018; 9(6):279. https://doi.org/10.3390/mi9060279
Chicago/Turabian StyleZhao, Yu, Jozef Brcka, Jacques Faguet, and Guigen Zhang. 2018. "Elucidating the Mechanisms of Two Unique Phenomena Governed by Particle-Particle Interaction under DEP: Tumbling Motion of Pearl Chains and Alignment of Ellipsoidal Particles" Micromachines 9, no. 6: 279. https://doi.org/10.3390/mi9060279
APA StyleZhao, Y., Brcka, J., Faguet, J., & Zhang, G. (2018). Elucidating the Mechanisms of Two Unique Phenomena Governed by Particle-Particle Interaction under DEP: Tumbling Motion of Pearl Chains and Alignment of Ellipsoidal Particles. Micromachines, 9(6), 279. https://doi.org/10.3390/mi9060279