

A Comparative Study of Safety Zone Visualisations for Virtual and Physical Robot Arms Using Augmented Reality

Abstract
:1. Introduction
2. Related Work
3. Methods
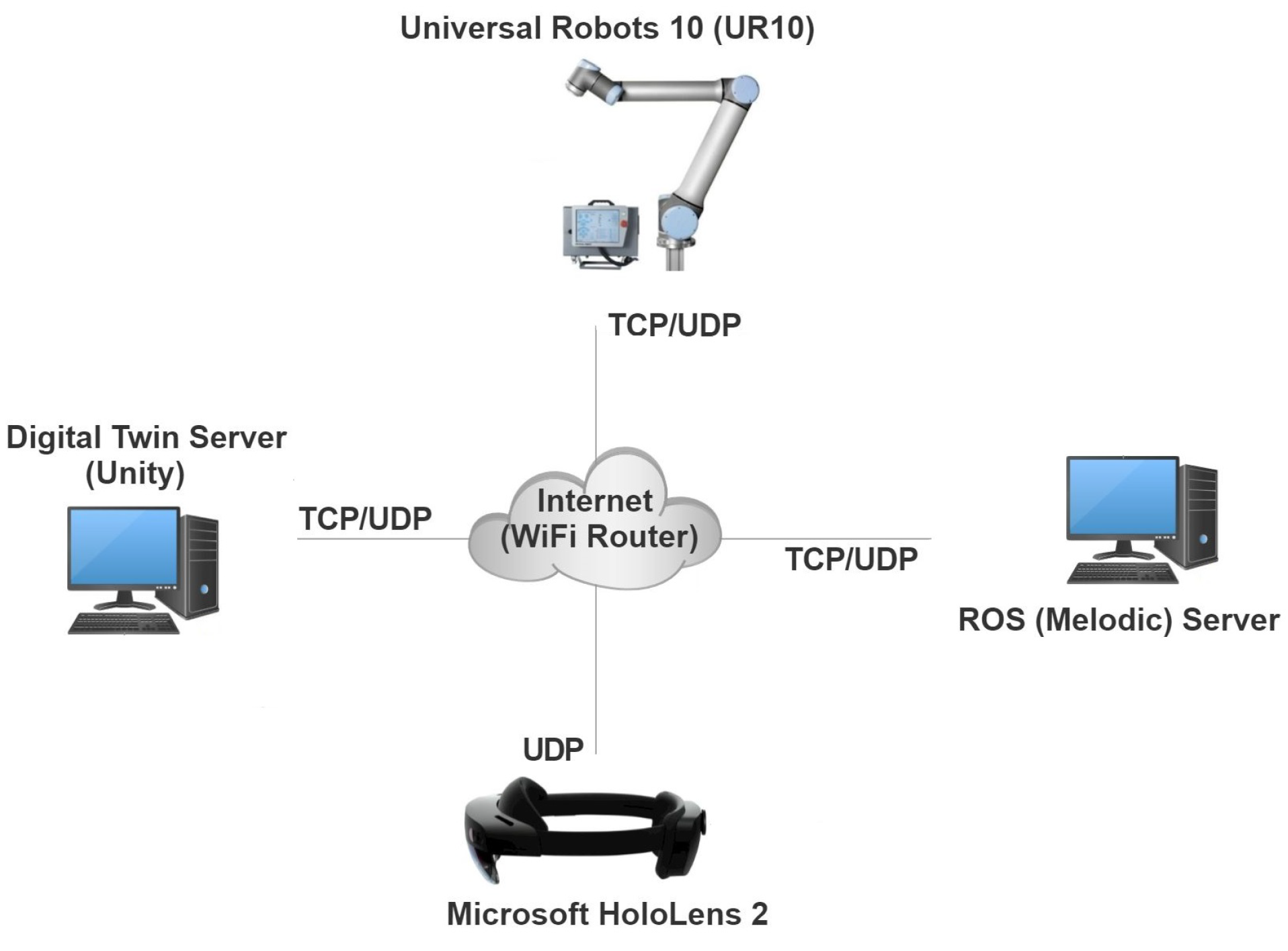
3.1. The System
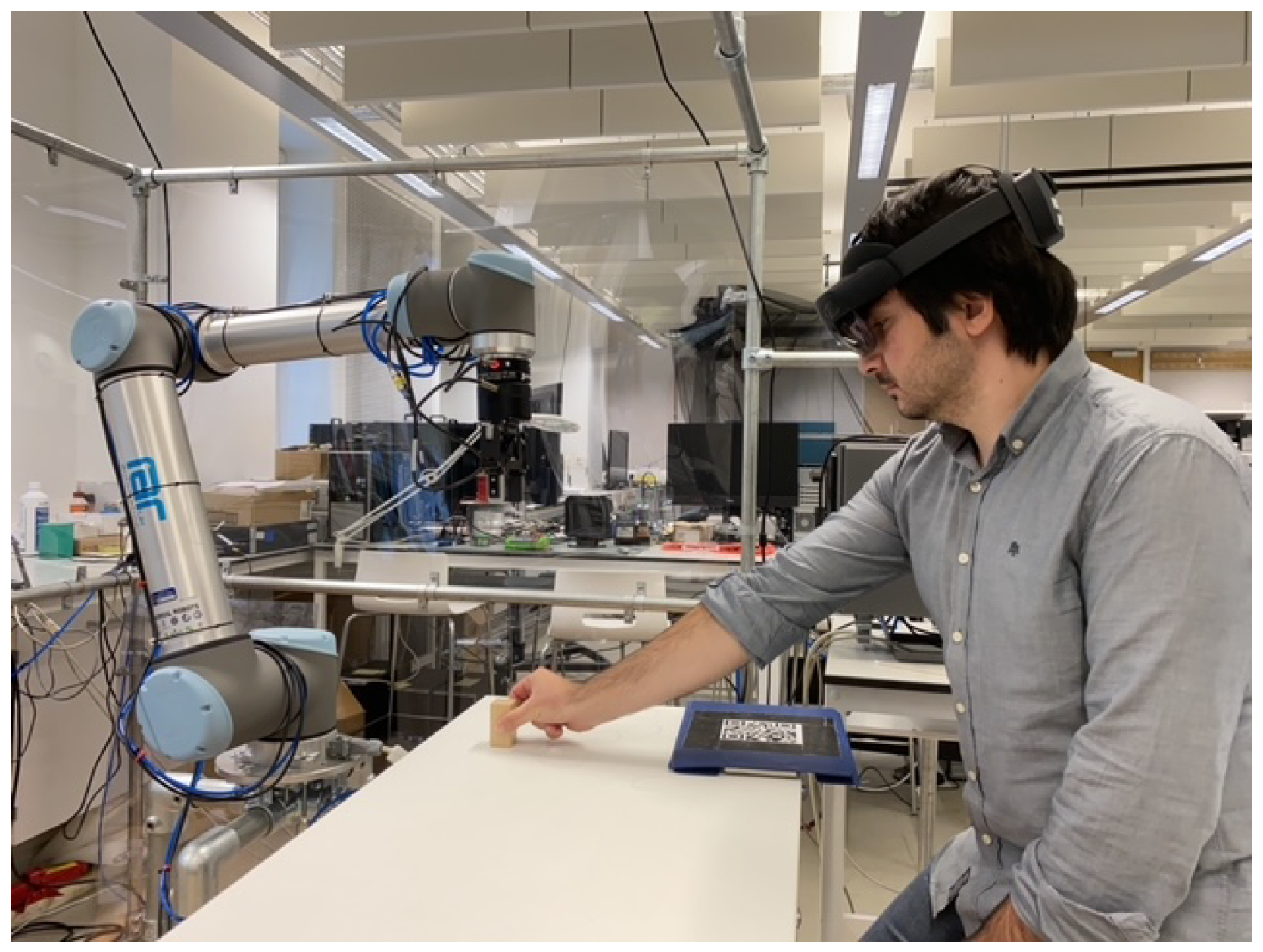
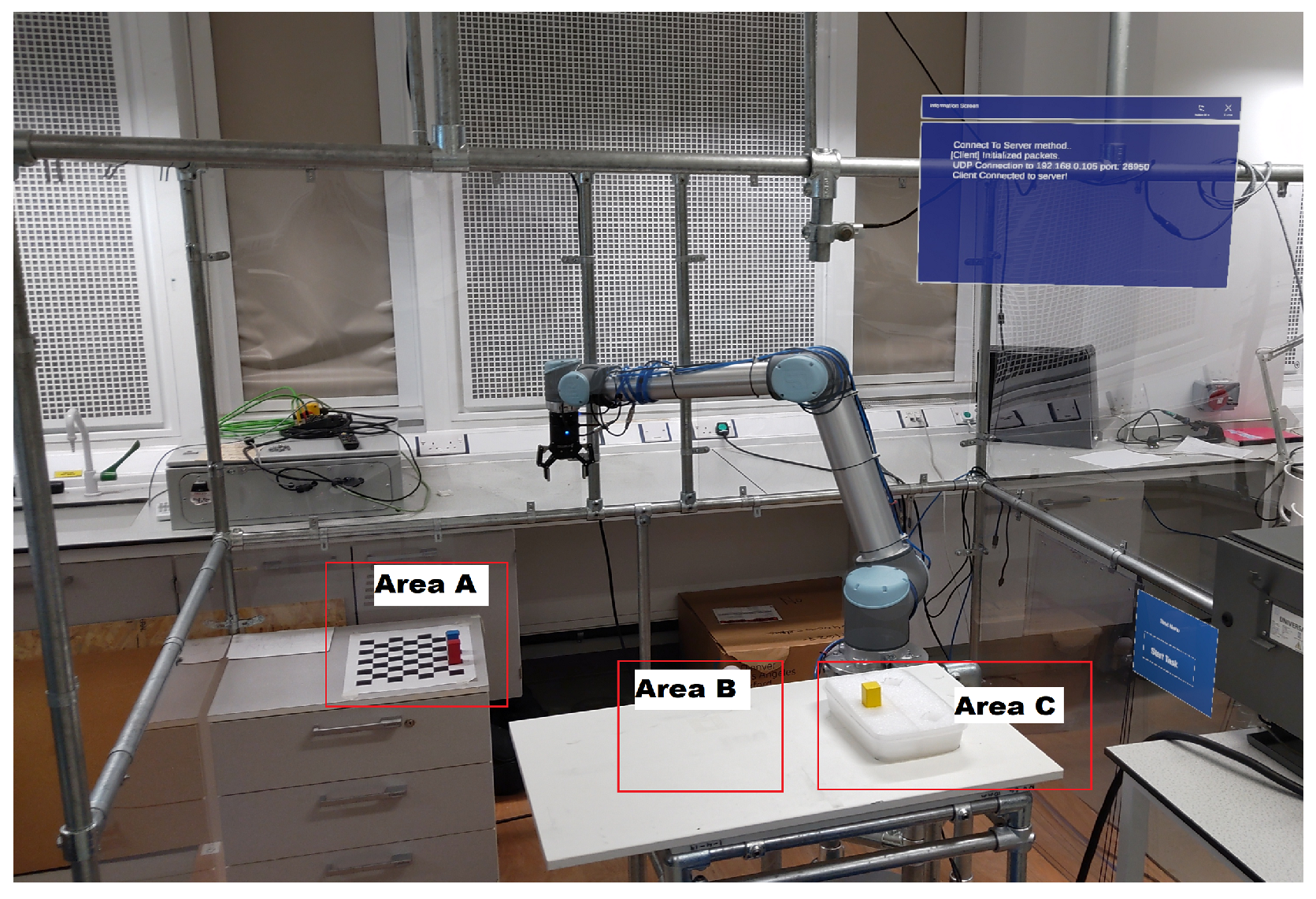
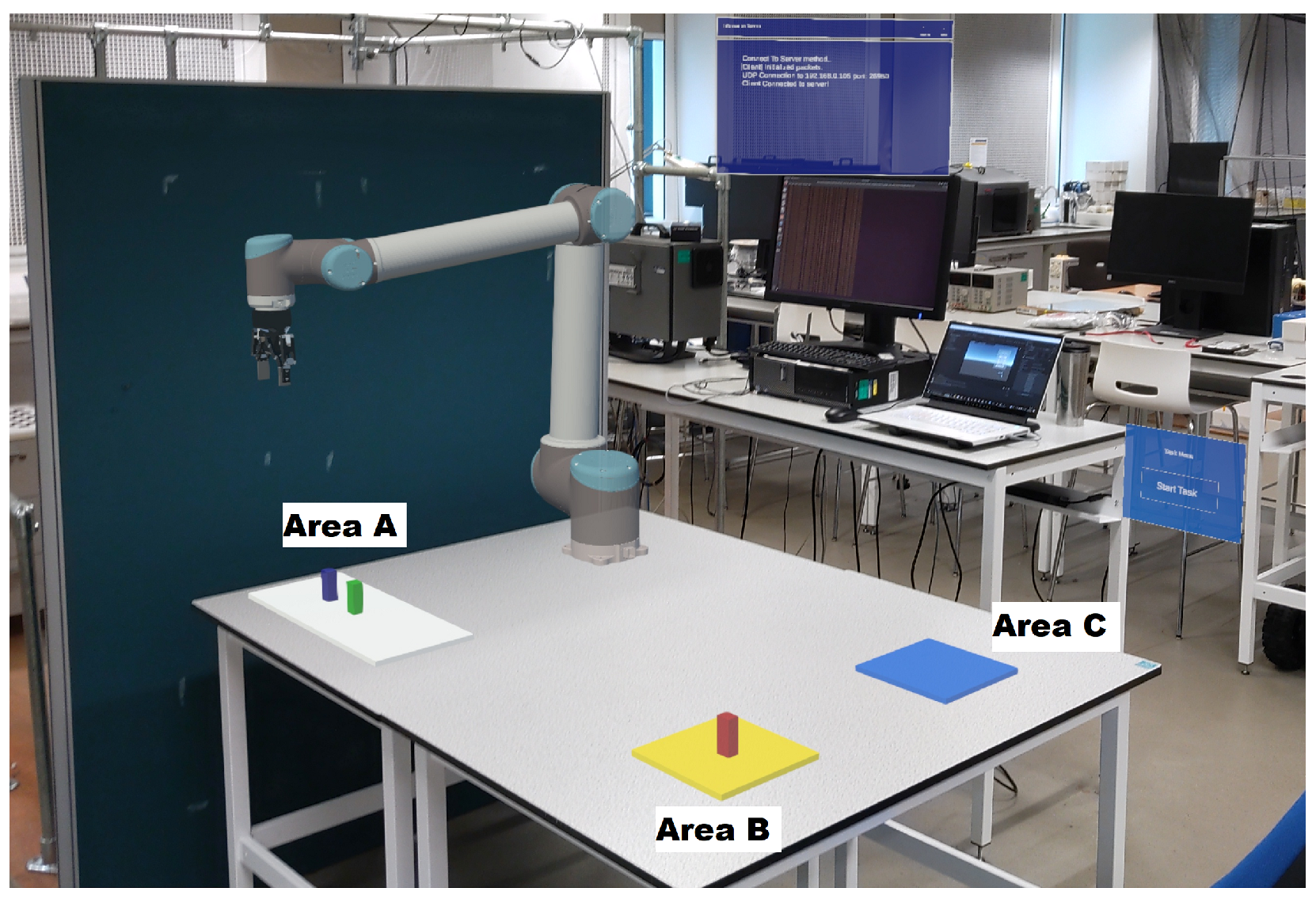
3.2. Experimental Setup


3.3. Process
4. Results and Discussion
4.1. The Real Robot Arm Experiment
4.2. The Virtual Robot Arm Experiment
4.3. Comparing the Results of the Real and Virtual Robot Arm Experiments
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Lotsaris, K.; Fousekis, N.; Koukas, S.; Aivaliotis, S.; Kousi, N.; Michalos, G.; Makris, S. Augmented Reality (AR) based framework for supporting human workers in flexible manufacturing. Procedia CIRP 2021, 96, 301–306. [Google Scholar] [CrossRef]
- Nenna, F.; Orso, V.; Zanardi, D.; Gamberini, L. The virtualization of human–robot interactions: A user-centric workload assessment. Virtual Real. 2022, 1–19. [Google Scholar] [CrossRef]
- Hietanen, A.; Pieters, R.; Lanz, M.; Latokartano, J.; Kämäräinen, J. AR-based interaction for human-robot collaborative manufacturing. Robot.-Comput.-Integr. Manuf. 2020, 63, 101891. [Google Scholar] [CrossRef]
- Hoang, K.; Chan, W.; Lay, S.; Cosgun, A.; Croft, E. Virtual Barriers in Augmented Reality for Safe and Effective Human-Robot Cooperation in Manufacturing. arXiv 2021, arXiv:2104.05211. [Google Scholar]
- Cogurcu, Y.; Maddock, S. An augmented reality system for safe human-robot collaboration. In Proceedings of the 4th UK-RAS Conference for PhD Students and Early-Career Researchers on“ Robotics At Home”, Online, 2 June 2021. [Google Scholar]
- Cogurcu, Y.; Douthwaite, J.; Maddock, S. Augmented reality for safety zones in human-robot collaboration. In Proceedings of the Computer Graphics & Visual Computing (CGVC) 2022, Virtual, 15–16 September 2022. [Google Scholar]
- Druta, R.; Druta, C.; Negirla, P.; Silea, I. A review on methods and systems for remote collaboration. Appl. Sci. 2021, 11, 10035. [Google Scholar] [CrossRef]
- Harris, D.; Bird, J.; Smart, P.; Wilson, M.; Vine, S. A framework for the testing and validation of simulated environments in experimentation and training. Front. Psychol. 2020, 11, 605. [Google Scholar] [CrossRef] [PubMed]
- Gallala, A.; Kumar, A.; Hichri, B.; Plapper, P. Digital Twin for human–robot interactions by means of Industry 4.0 Enabling Technologies. Sensors 2022, 22, 4950. [Google Scholar] [CrossRef] [PubMed]
- ISO/TS 15066:2016; Robots and Robotic Devices Collaborative Robots. International Organization for Standardization: Geneve, Switzerland, 2016.
- Oyekan, J.; Hutabarat, W.; Tiwari, A.; Grech, R.; Aung, M.; Mariani, M.; López-Dávalos, L.; Ricaud, T.; Singh, S.; Dupuis, C. The effectiveness of virtual environments in developing collaborative strategies between industrial robots and humans. Robot.-Comput.-Integr. Manuf. 2019, 55, 41–54. [Google Scholar] [CrossRef]
- Malik, A.; Masood, T.; Bilberg, A. Virtual reality in manufacturing: Immersive and collaborative artificial-reality in design of human-robot workspace. Int. J. Comput. Integr. Manuf. 2020, 33, 22–37. [Google Scholar] [CrossRef]
- Eswaran, M.; Bahubalendruni, M. Challenges and opportunities on AR/VR technologies for manufacturing systems in the context of industry 4.0: A state of the art review. J. Manuf. Syst. 2022, 65, 260–278. [Google Scholar] [CrossRef]
- Han, Z.; Zhu, Y.; Phan, A.; Garza, F.; Castro, A.; Williams, T. Crossing Reality: Comparing Physical and Virtual Robot Deixis. In Proceedings of the 2023 ACM/IEEE International Conference On Human-Robot Interaction (HRI), Stockholm, Sweden, 13–16 March 2023. [Google Scholar]
- Douthwaite, J.; Lesage, B.; Gleirscher, M.; Calinescu, R.; Aitken, J.; Alexander, R.; Law, J. A Modular Digital Twinning Framework for Safety Assurance of Collaborative Robotics. Front. Robot. AI. 2021, 8, 758099. [Google Scholar] [CrossRef] [PubMed]
- ISO 10218-2; Robots and Robotic Devices–Safety Requirements for Industrial Robots—Part 2: Robot Systems and Integration. International Organization for Standardization: Geneve, Switzerland, 2011.
- Miro, M.; Glogowski, P.; Lemmerz, K.; Kuhlenkoetter, B.; Gualtieri, L.; Rauch, E.; Gkournelos, C.; Makris, S.; Plapper, P.; Kumar, A. Simulation technology and application of safe collaborative operations in human-robot interaction. In Proceedings of the ISR Europe 2022, 54th International Symposium on Robotics, Munich, Germany, 20–21 June 2022; pp. 1–9. [Google Scholar]
- ISO 13855; Safety of machinery—Positioning of Safeguards with Respect to the Approach Speeds of Parts of the Human Body. International Organization for Standardization: Geneve, Switzerland, 2010.
- Park, M.; Han, D.; Lim, J.; Shin, M.; Han, Y.; Kim, D.; Rhim, S.; Kim, K. Assessment of pressure pain thresholds in collisions with collaborative robots. PLoS ONE 2019, 14, e0215890. [Google Scholar] [CrossRef] [PubMed]
- Van Laerhoven, H.; Zaag-Loonen, H.; Derkx, B. A comparison of Likert scale and visual analogue scales as response options in children’s questionnaires. Acta Paediatr. 2004, 93, 830–835. [Google Scholar] [CrossRef] [PubMed]
- Derrick, B.; White, P. Comparing two samples from an individual Likert question. Int. J. Math. Stat. 2017, 18, 1–13. [Google Scholar]
- Uska, M.; Wirasasmita, R.; Fahrurrozi, M. The application of Usability Testing Method for Evaluating the New Student Acceptance (NSA) System. J. Phys. Conf. Ser. 2020, 1539, 012028. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Question No | Questions |
|---|---|
| Configurations | |
| Q1 | This configuration made it easier for me to do the task than the other configurations. |
| Q2 | This configuration made me trust the robot arm when I was doing the task. |
| Q3 | This configuration made me feel safe when I was doing the task. |
| Q4 | I would choose this configuration if I had to do a similar task again. |
| Q5 | Please put the configurations in your order of preference. Your preferred best configuration should be rated as 1 and the others 2, 3, and 4. Tick the relevant boxes accordingly. |
| Use of Microsoft HoloLens 2 | |
| Q6a | I found the HoloLens 2 easy to use. |
| Q6b | I found the HoloLens 2 to be comfortable to use. |
| Visualisation | |
| Q7a | The red transparency effect without the virtual bars worked well for displaying the safety zones. |
| Q7b | The red transparency effect with the virtual bars worked well for displaying the safety zones. |
| Q7c | Red is a good colour to use for the safety zone display. |
| Q7d | The cuboid safety zones dynamically changed in size during the experiments. I did not find this distracting. |
| Q7e | Overall, I thought the safety zones were well displayed. |
| The System | |
| Q8a | I was confident whilst doing the task using the system. |
| Q8b | Interaction with the robot arm was easy using the system. |
| Q8c | I think that I would need the help of a technical person to use the system in the future. |
| Q8d | I would imagine that most people would learn to use this system quickly. |
| Q8e | When I made a mistake or the robot made a mistake, it was easy and quick to recover and continue with the task. |
| Strongly Disagree | Disagree | Neither Disagree Nor Agree | Agree | Strongly Agree | |
|---|---|---|---|---|---|
| Configuration | |||||
| Q1–configuration made it easier to do the task | |||||
| Small cuboid | - | - | - | - | - |
| Small cylinders | - | - | - | - | - |
| Large cuboid with cage bars | - | - | - | 3 | - |
| Large cylinders with cage bars | - | - | - | 3 | 8 |
| Q2–configuration made me trust the robot arm | |||||
| Small cuboid | - | - | - | - | - |
| Small cylinders | - | - | - | 1 | 1 |
| Large cuboid with cage bars | - | - | - | 2 | 3 |
| Large cylinders with cage bars | - | - | - | 1 | 6 |
| Q3–configuration made me feel safe | |||||
| Small cuboid | - | - | - | - | - |
| Small cylinders | - | - | - | - | 1 |
| Large cuboid with cage bars | - | - | - | 2 | 3 |
| Large cylinders with cage bars | - | - | - | 2 | 6 |
| Q4–would choose this configuration again | |||||
| Small cuboid | - | - | - | - | - |
| Small cylinders | - | - | - | 1 | - |
| Large cuboid with cage bars | - | - | - | 3 | 1 |
| Large cylinders with cage bars | - | - | - | - | 9 |
| HoloLens 2 | |||||
| Q6a–easy to use | - | 2 | - | 10 | 2 |
| Q6b–comfortable to use | - | 1 | 1 | 7 | 5 |
| Visualisation | |||||
| Q7a–red transparency without virtual bars worked well | 1 | 7 | 2 | 3 | 1 |
| Q7b–red transparency with virtual bars worked well | - | - | - | 1 | 13 |
| Q7c–red is a good colour to use for the safety zone display | - | - | 2 | 3 | 9 |
| Q7d–dynamic cuboid is not distracting | 1 | - | - | 4 | 9 |
| Q7e–safety zones were well displayed | - | - | - | 7 | 7 |
| The System | |||||
| Q8a–user confident with system | - | - | - | 3 | 11 |
| Q8b–interaction was easy | - | - | - | 2 | 12 |
| Q8c–need the help of a technical person | 6 | 6 | 2 | - | - |
| Q8d–people would learn the system quickly | - | - | - | 6 | 8 |
| Q8e–if mistake made, it was easy and quick to recover | - | - | - | 5 | 9 |
| Rankings | ||||
|---|---|---|---|---|
| Configurations | 1 | 2 | 3 | 4 |
| Small cuboid | 1 | 1 | 1 | 11 |
| Small cylinders | - | 5 | 6 | 3 |
| Large cuboid with cage bars | 3 | 6 | 5 | - |
| Large cylinders with cage bars | 10 | 2 | 2 | - |
| Strongly Disagree | Disagree | Neither Disagree Nor Agree | Agree | Strongly Agree | |
|---|---|---|---|---|---|
| Configuration | |||||
| Q1–configuration made it easier to do the task | |||||
| Small cuboid | - | - | - | 1 | - |
| Small cylinders | - | - | - | 2 | 2 |
| Large cuboid with cage bars | - | - | - | 2 | 4 |
| Large cylinders with cage bars | - | - | - | - | 3 |
| Q2–configuration made me trust the robot arm | |||||
| Small cuboid | - | - | - | - | 1 |
| Small cylinders | - | - | - | 1 | 2 |
| Large cuboid with cage bars | - | - | - | 2 | 4 |
| Large cylinders with cage bars | - | - | - | 2 | 2 |
| Q3–configuration made me feel safe | |||||
| Small cuboid | - | - | - | - | 1 |
| Small cylinders | - | - | - | - | 3 |
| Large cuboid with cage bars | - | - | - | 1 | 6 |
| Large cylinders with cage bars | - | - | - | 2 | 1 |
| Q4–would choose this configuration again | |||||
| Small cuboid | - | - | - | - | 1 |
| Small cylinders | - | - | - | 1 | 2 |
| Large cuboid with cage bars | - | - | - | 2 | 2 |
| Large cylinders with cage bars | - | - | - | 1 | 5 |
| HoloLens 2 | |||||
| Q6a–easy to use | - | 1 | - | 4 | 9 |
| Q6b–comfortable to use | - | - | 2 | 4 | 8 |
| Visualisation | |||||
| Q7a–red transparency without virtual bars worked well | 2 | 5 | 3 | 2 | 2 |
| Q7b–red transparency with virtual bars worked well | 1 | 1 | 1 | 3 | 8 |
| Q7c–red is a good colour to use for the safety zone display | - | - | 2 | 7 | 5 |
| Q7d–dynamic cuboid is not distracting | 3 | 1 | - | 7 | 3 |
| Q7e–safety zones were well displayed | - | - | - | 8 | 6 |
| The System | |||||
| Q8a–user confident with system | - | - | - | 4 | 10 |
| Q8b–interaction was easy | - | - | 1 | 4 | 9 |
| Q8c–need the help of a technical person | 5 | 9 | - | - | - |
| Q8d–people would learn the system quickly | - | - | 1 | 3 | 10 |
| Q8e–if a mistake was made, it was easy and quick to recover | - | - | 1 | 6 | 7 |
| Rankings | ||||
|---|---|---|---|---|
| Configurations | 1 | 2 | 3 | 4 |
| Small cuboid | 1 | 3 | 4 | 6 |
| Small cylinders | 3 | 4 | 6 | 1 |
| Large cuboid with cage bars | 6 | 4 | 1 | 3 |
| Large cylinders with cage bars | 4 | 3 | 3 | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cogurcu, Y.E.; Douthwaite, J.A.; Maddock, S. A Comparative Study of Safety Zone Visualisations for Virtual and Physical Robot Arms Using Augmented Reality. Computers 2023, 12, 75. https://doi.org/10.3390/computers12040075
Cogurcu YE, Douthwaite JA, Maddock S. A Comparative Study of Safety Zone Visualisations for Virtual and Physical Robot Arms Using Augmented Reality. Computers. 2023; 12(4):75. https://doi.org/10.3390/computers12040075
Chicago/Turabian StyleCogurcu, Yunus Emre, James A. Douthwaite, and Steve Maddock. 2023. "A Comparative Study of Safety Zone Visualisations for Virtual and Physical Robot Arms Using Augmented Reality" Computers 12, no. 4: 75. https://doi.org/10.3390/computers12040075
APA StyleCogurcu, Y. E., Douthwaite, J. A., & Maddock, S. (2023). A Comparative Study of Safety Zone Visualisations for Virtual and Physical Robot Arms Using Augmented Reality. Computers, 12(4), 75. https://doi.org/10.3390/computers12040075