Parallel Tempering Monte Carlo Studies of Phase Transition of Free Boundary Planar Surfaces


Abstract
:1. Introduction
2. Models and Monte Carlo Technique
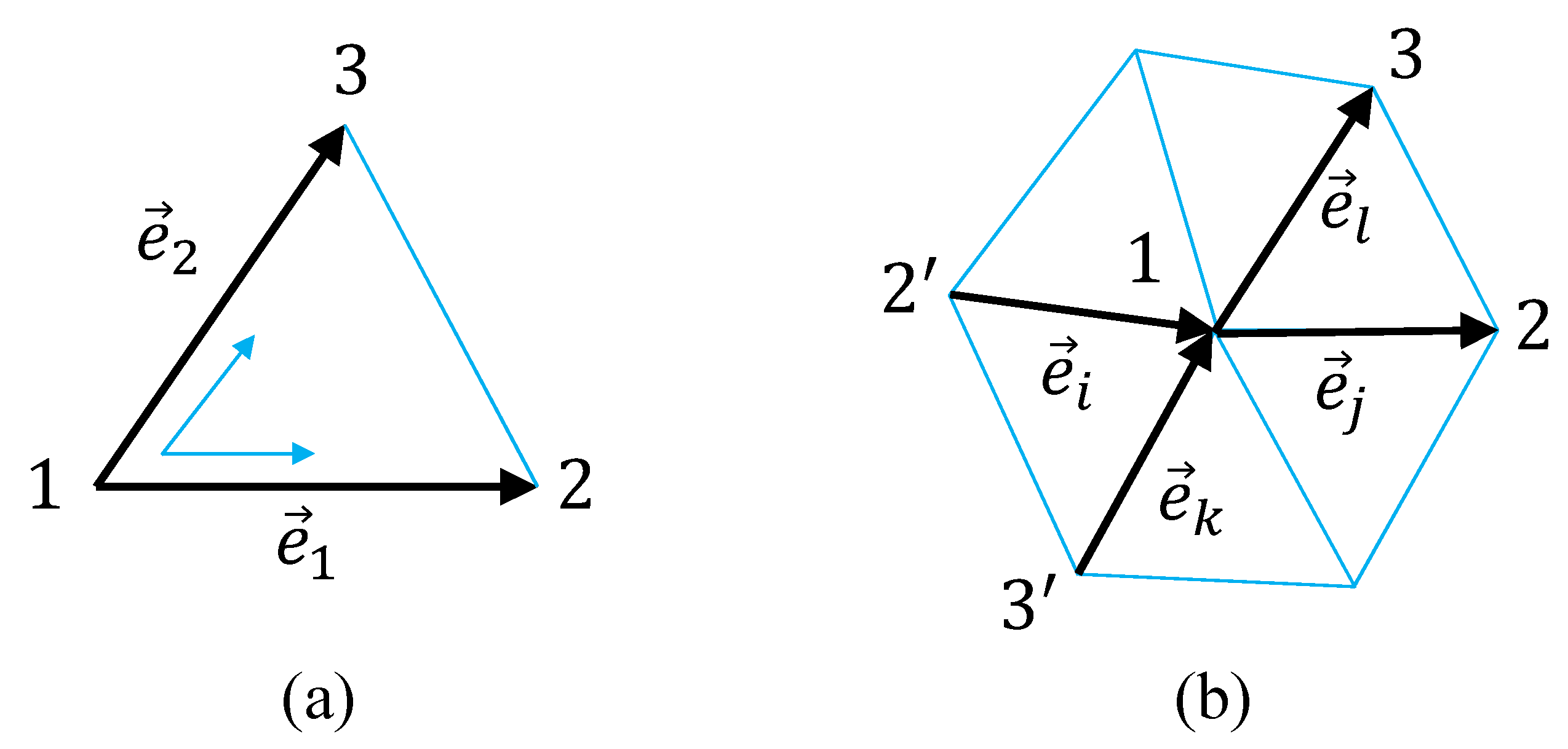
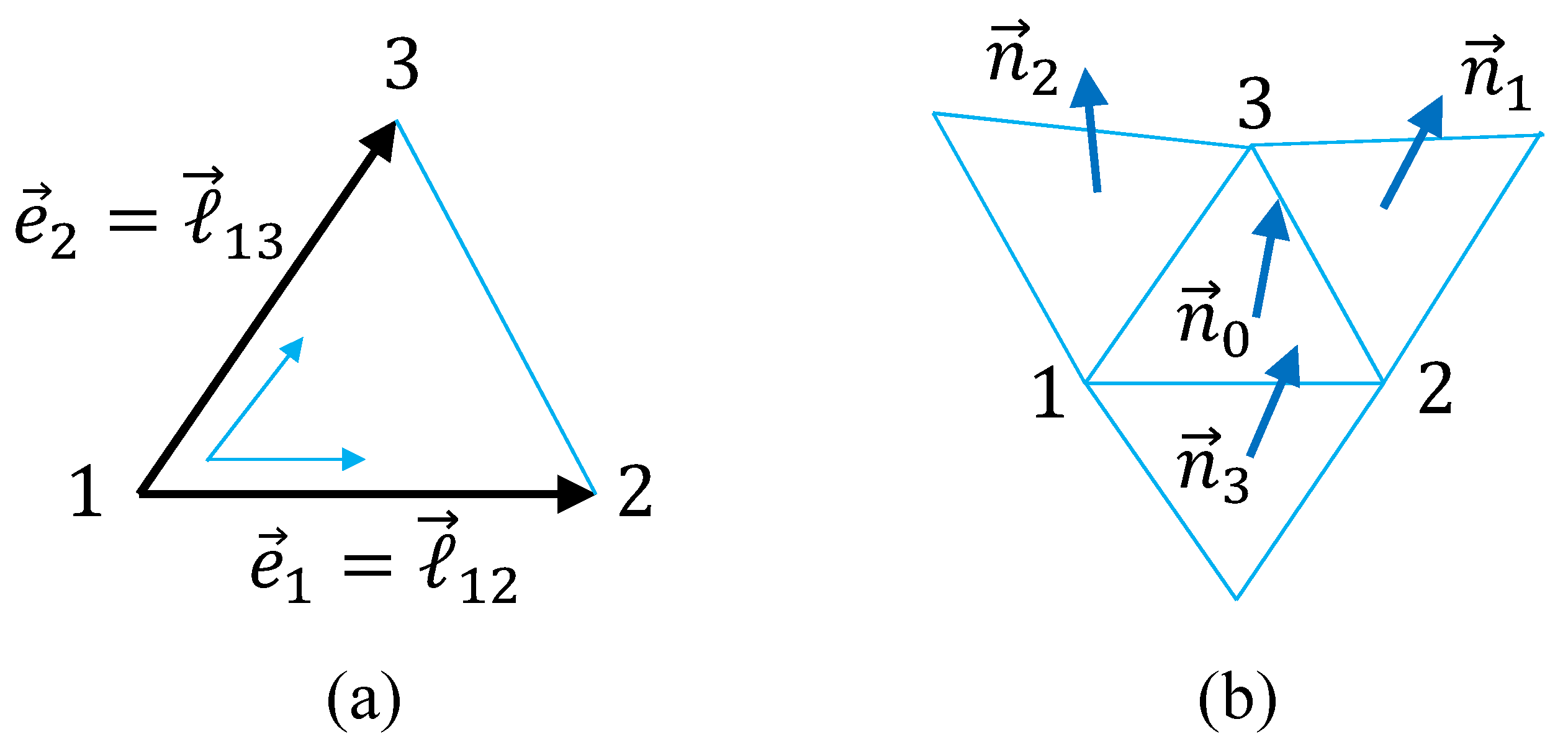
2.1. Triangulated Disk
2.2. Landau-Ginzburg surface Model
2.3. Canonical Model
2.4. Modified Canonical Model
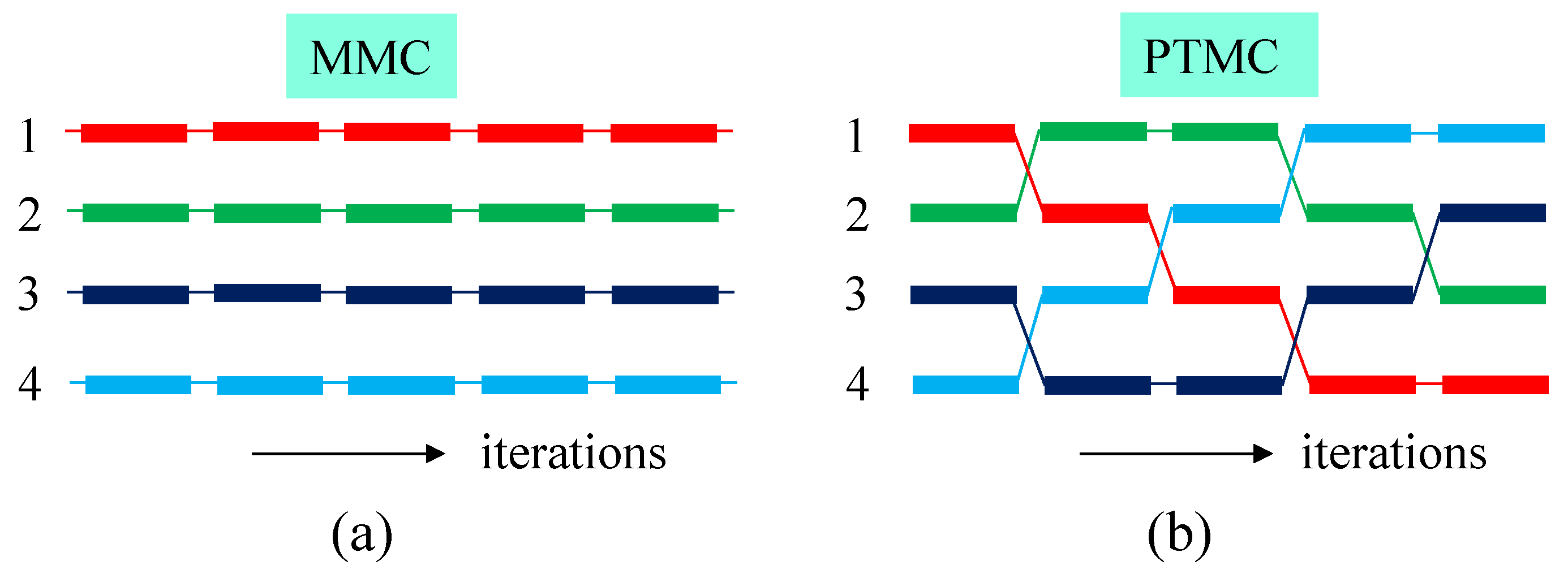
2.5. Parallel Tempering Monte Carlo Technique
- (P1)
- Perform long MMC simulations for replicas
- (P2)
- Exchange all nearest neighbor systems and with the probability
- (P3)
- Repeat and
3. Simulation Results
3.1. Snapshots
3.2. Bending Energy and Mean Square Gyration
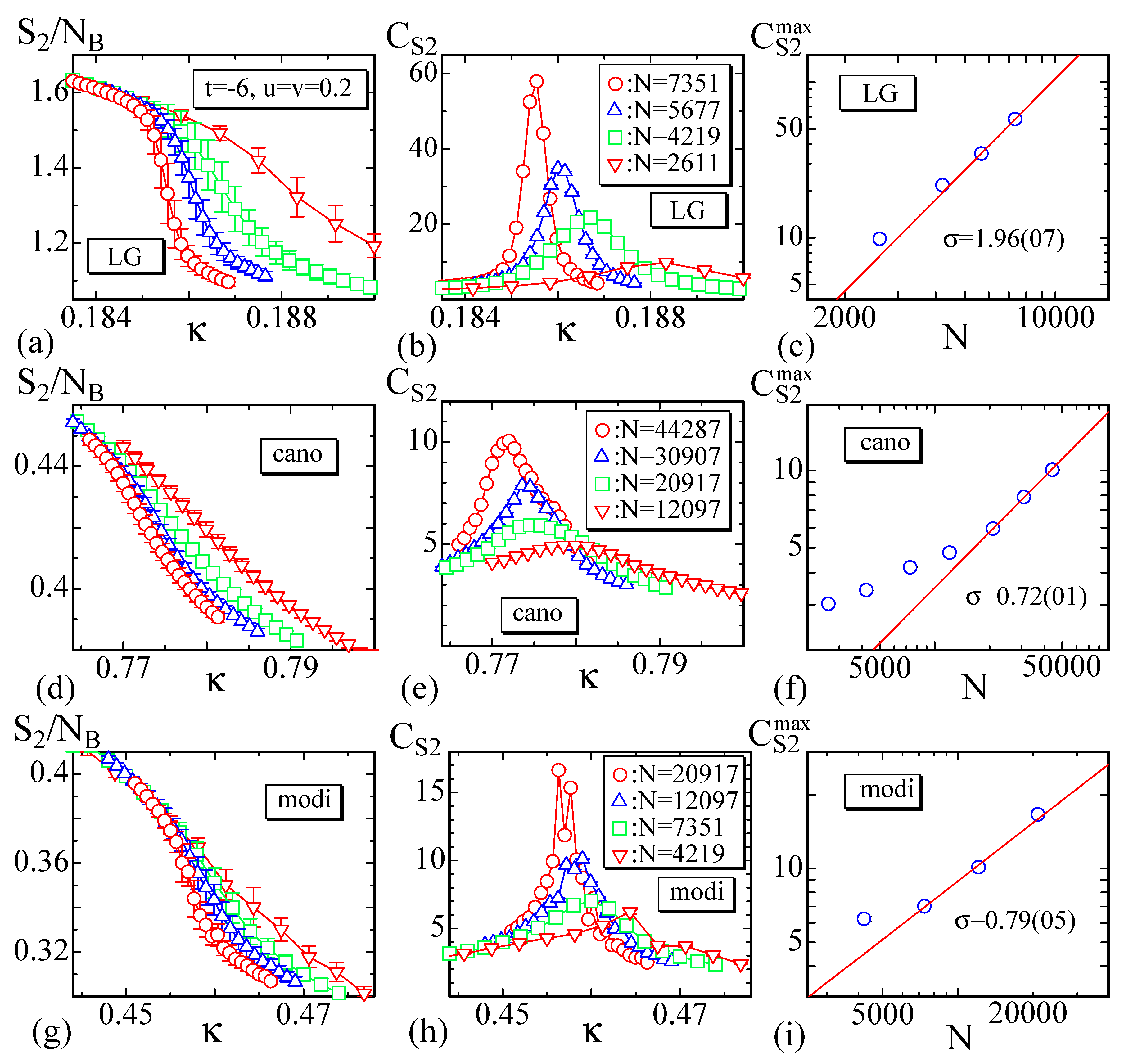
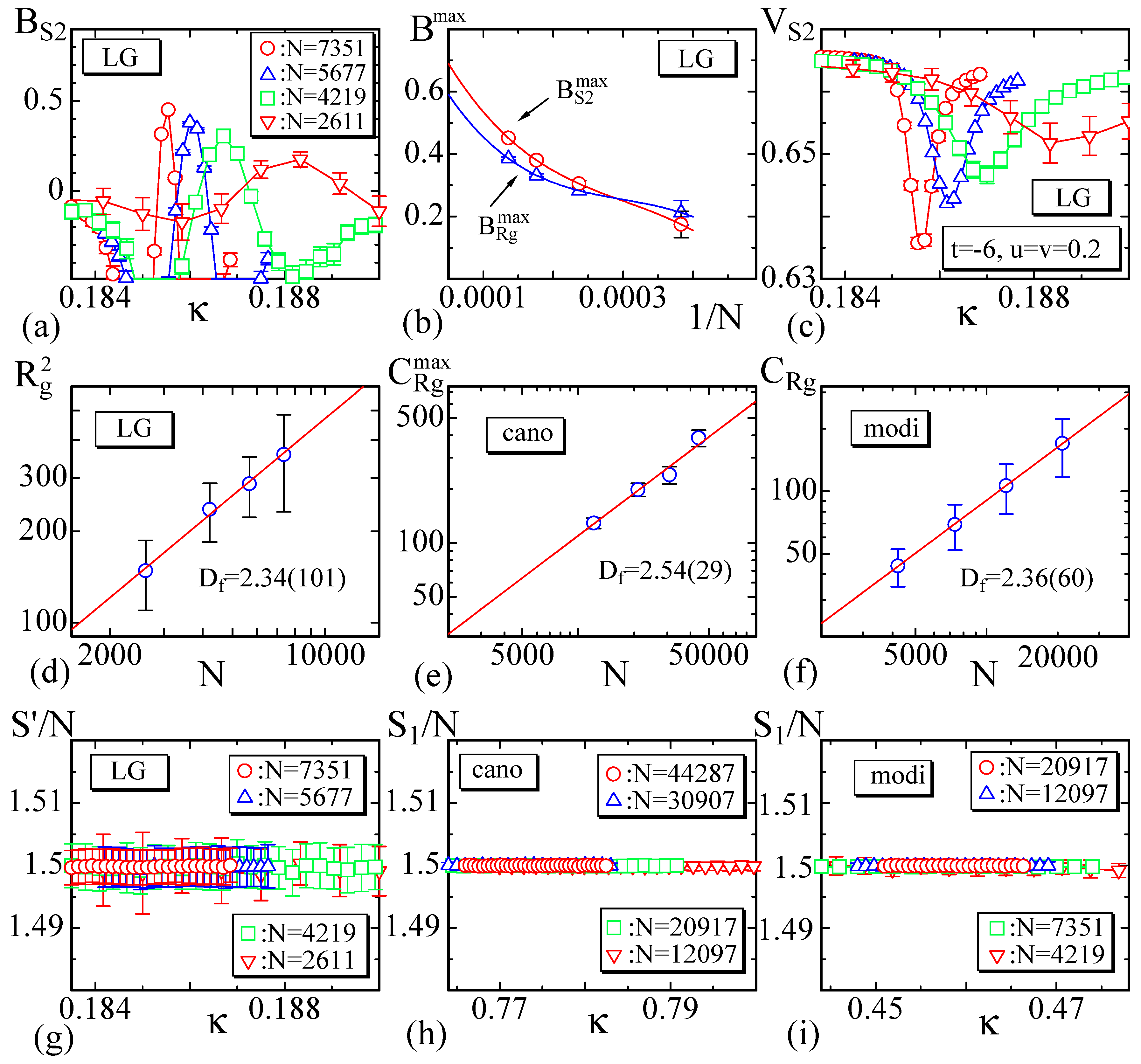
3.3. Binder Quantity and Fractal Dimension
4. Summary and Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| MC | Monte Carlo |
| PTMC | parallel tempering Monte Carlo |
| MMC | Metropolis Monte Carlo |
| MCS | Three letter acronym |
| LG | Landau Ginzburg |
| cano | canonical |
| modi | modified canonical |
References
- Helfrich, W. Elastic Properties of Lipid Bilayers: Theory and Possible Experiments. Z. Naturforsch C 1973, 28, 693–703. [Google Scholar] [CrossRef] [PubMed]
- Polyakov, A.M. Fine structure of strings. Nucl. Phys. B 1986, 268, 406–412. [Google Scholar] [CrossRef]
- Peliti, L.; Leibler, S. Effects of Thermal Fluctuations on Systems with Small Surface Tension. Phys. Rev. Lett. 1985, 54, 1690–1693. [Google Scholar] [CrossRef] [PubMed]
- Guitter, E.; David, F.; Leibler, S.; Peliti, L. Crumpling and Buckling Transitions in Polymerized Membranes. Phys. Rev. Lett. 1988, 61, 2949–2952. [Google Scholar] [CrossRef]
- David, F.; Guitter, E. Crumpling Transition in Elastic Membranes: Renormalization Group Treatment. Europhys. Lett. 1988, 5, 709–714. [Google Scholar] [CrossRef]
- Nelson, D. The Statistical Mechanics of Membranes and Interfaces. In Statistical Mechanics of Membranes and Surfaces, 2nd ed.; Nelson, D., Piran, T., Weinberg, S., Eds.; World Scientific: Singapore, 2004; pp. 1–17. [Google Scholar]
- Wheater, J.F. Random surfaces: From polymer membranes to strings. J. Phys. A Math. Gen. 1994, 27, 3323–3354. [Google Scholar] [CrossRef]
- Kownacki, J.-P.; Mouhanna, D. Crumpling transition and flat phase of polymerized phantom membranes. Phys. Rev. E 2009, 79, 040101. [Google Scholar] [CrossRef]
- Essafi, K.; Kownacki, J.P.; Mouhanna, D. First-order phase transitions in polymerized phantom membranes. Phys. Rev. E 2014, 89, 042101. [Google Scholar] [CrossRef]
- Bowick, M.; Travesset, A. The statistical mechanics of membranes. Phys. Rep. 2001, 344, 255–308. [Google Scholar] [CrossRef] [Green Version]
- Bowick, M.J. Fixed-connectivity Membranes. In Statistical Mechanics of Membranes and Surfaces, 2nd ed.; Nelson, D., Piran, T., Weinberg, S., Eds.; World Scientific: Singapore, 2004; pp. 323–357. [Google Scholar]
- Gompper, G.; Kroll, D.M. Triangulated-surface Models of Fluctuating Membranes. In Statistical Mechanics of Membranes and Surfaces, 2nd ed.; Nelson, D., Piran, T., Weinberg, S., Eds.; World Scientific: Singapore, 2004; pp. 59–426. [Google Scholar]
- Kantor, Y.; Karder, M.; Nelson, D.R. Tethered surfaces: Statics and dynamics. Phys. Rev. A 1987, 35, 3056–3071. [Google Scholar] [CrossRef]
- Kantor, Y.; Nelson, D.R. Phase Transitions in Flexible Polymeric Surfaces. Phys. Rev. A 1987, 36, 4020–4032. [Google Scholar] [CrossRef]
- Ho, J.-S.; Baumga¨rtner, A. Simulations of Fluid Self-Avoiding Membranes. Europhys. Lett. 1990, 12, 295–300. [Google Scholar] [CrossRef]
- Ambjo¨rn, J.; Irba¨ck, A.; Jurkiewicz, J.; Petersson, B. The theory of dynamical random surfaces with extrinsic curvature. Nucl. Phys. B 1993, 393, 571–600. [Google Scholar] [CrossRef] [Green Version]
- Kownacki, J.-P.; Diep, H.T. First-order transition of tethered membranes in three-dimensional space. Phys. Rev. E 2002, 66, 066105. [Google Scholar] [CrossRef] [PubMed]
- Nishiyama, Y. Crumpling transition of the triangular lattice without open edges: Effect of a modified folding rule. Phys. Rev. E 2010, 81, 041116. [Google Scholar] [CrossRef] [PubMed]
- Nishiyama, Y. Crumpling transition of the discrete planar folding in the negative-bending-rigidity regime. Phys. Rev. E 2010, 82, 012102. [Google Scholar] [CrossRef]
- Endo, I.; Koibuchi, H. First-order phase transition of the tethered membrane model on spherical surfaces. Nucl. Phys. B 2006, 732, 426–443. [Google Scholar] [CrossRef] [Green Version]
- Igawa, M.; Koibuchi, H.; Yamada, M. Monte Carlo simulations of a tethered membrane model on a disk with intrinsic curvature. Phys. Lett. A 2005, 338, 433–438. [Google Scholar] [CrossRef] [Green Version]
- Bowick, M.J.; Catterall, S.M.; Falcioni, M.; Thorleifsson, G.; Anagnostopoulos, K.N. The Flat Phase of Crystalline Membranes. J. Phys. I 1996, 6, 1321–1345. [Google Scholar] [CrossRef] [Green Version]
- Cuerno, R.; Caballero, R.G.; Gordillo-Guerrero, A.; Monroy, P.; Ruiz-Lorenzo, J.J. Universal behavior of crystalline membranes: Crumpling transition and Poisson ratio of the flat phase. Phys. Rev. E 2016, 93, 022111. [Google Scholar] [CrossRef]
- Hukushima, K.; Nemoto, K. Exchange Monte Carlo method and application to spin glass simulations. J. Phys. Soc. Jpn. 1996, 65, 1604–1608. [Google Scholar] [CrossRef]
- Takayama, H.; Hukushima, K. Computational experiment on glassy dynamic nature of field-cooled magnetization in ising spin-glass model. J. Phys. Soc. Jpn. 2007, 76, 013702. [Google Scholar] [CrossRef]
- Neuhaus, T.; Magiera, M.P.; Hansmann, U.H.E. Efficient parallel tempering for first-order phase transitions. Phys. Rev. E 2007, 76, 045701R. [Google Scholar] [CrossRef] [PubMed]
- Fiore, C.E. First-order phase transitions: A study through the parallel tempering method. Phys. Rev. E 2008, 78, 041109. [Google Scholar] [CrossRef] [PubMed]
- Usui, S.; Koibuchi, H. Parallel TemperingMonte Carlo Simulations of Spherical Fixed-Connectivity Model for Polymerized Membranes. J. Stat. Phys. 2016, 162, 701–711. [Google Scholar] [CrossRef]
- Koltonow, A.R.; Luo, C.; Luo, J.; Huang, J. Graphene Oxide Sheets in Solvents: To Crumple or Not to Crumple? ACS Omega 2017, 2, 8005–8009. [Google Scholar] [CrossRef]
- Shang, J.; Chen, Y.; Zhou, Y.; Liu, L.; Wang, G.; Li, X.; Kuang, J.; Liu, Q.; Dai, Z.; Miao, H.; et al. Effect of folded and crumpled morphologies of graphene oxide platelets on the mechanical performances of polymer nanocomposites. Polymer 2014, 68, 131–139. [Google Scholar] [CrossRef]
- Novoselov, K.S.; Geim, A.K.; Morozov, S.V.; Jiang, D.; Zhang, Y.; Dubonos, S.V.; Grigorieva, I.V.; Firsov, A.A. Electric Field Effect in Atomically Thin Carbon Films. Science 2004, 306, 666–669. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Novoselov, K.S.; Jiang, D.; Schedin, F.; Booth, T.J.; Khotkevich, V.V.; Morozov, S.V.; Geim, A.K. Two-dimensional atomic crystals. Proc. Natl. Acad. Sci. USA 2005, 102, 10451–10453. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Deng, S.; Berry, V. Wrinkled, rippled and crumpled graphene: An overview of formation mechanism, electronic properties, and applications. Mater. Today 2016, 19, 197–212. [Google Scholar] [CrossRef]
- Papageorgiou, D.G.; Kinloch, I.A.; Young, R.J. Mechanical properties of graphene and graphene-based nanocomposites. Prog. Mat. Sci. 2017, 90, 75–127. [Google Scholar] [CrossRef]
- Zang, J.; Ryu, S.; Pugno, N.; Wang, Q.; Tu, Q.; Buehler, M.J.; Zhao, X. Multifunctionality and control of the crumpling and unfolding of large-area graphene. Nat. Mat. 2013. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Jang, H.D.; Sun, T.; Xiao, L.; He, Z.; Katsoulidis, A.P.; Kanatzidis, M.G.; Gibson, J.M.; Huang, J. Compression and Aggregation-Resistant Particles of Crumpled Soft Sheets. ACS Nano 2011, 5, 8943–8949. [Google Scholar] [CrossRef] [PubMed]
- Chee, W.K.; Lim, H.N.; Huang, N.M.; Harrison, I. Nanocomposites of Graphene/ Polymers: A Review. RSC Adv. 2015, 5, 68014–68051. [Google Scholar] [CrossRef]
- Di´ez-Pascual, A.M.; Sa´nchez, J.A.L.; Capilla, R.P.; Di´az, P.G. Recent Developments in Graphene/Polymer Nanocomposites for pplication in Polymer Solar Cells. Polymers 2018, 10, 217. [Google Scholar] [CrossRef]
- Kim, H.; Abdala, A.A.; Macosko, C.W. Graphene/Polymer Nanocomposites. Macromolecules 2010, 43, 6515–6530. [Google Scholar] [CrossRef]
- Dai, Z.; Weng, C.; Liu, L.; Hou, Y.; Zhao, X.; Kuang, J.; Shi, J.; Wei, Y.; Lou, J.; Zhang, Z. Multifunctional Polymer-Based Graphene Foams with Buckled Structure and Negative Poisson’s Ratio. Sci. Rep. 2016, 6, 32989. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marsden, A.J.; Papageorgiou, D.G.; Valle´s, C.; Liscio, A.; V Palermo, V.; Bisse, M.A.; Young, R.J.; Kinloch, I.A. Electrical percolation in graphene-polymer composites. 2D Mater. 2018, 5, 032003. [Google Scholar] [CrossRef]
- Creutz, M. Quarks, Gluons and Lattices; Cambridge University Press: Cambridge, UK, 1983. [Google Scholar]
- Paczuski, M.; Kardar, M.; Nelson, D.R. Landau Theory of the Crumpling Transition. Phys. Rev. Lett. 1988, 60, 2638–2640. [Google Scholar] [CrossRef] [PubMed]
- Koibuchi, H.; Shobukhov, A. Monte Carlo simulations of Landau-Ginzburg model for membranes. Int. J. Mod. Phys. C 2014, 25, 1450033. [Google Scholar] [CrossRef]
- Koibuchi, H. Monte Carlo studies of triangulated spherical surfaces in the two-dimensional space. Nucl. Phys. B 2010, 836, 186–203. [Google Scholar] [CrossRef]
- Ueno, K. Algebraic geometry and string theory. In Developments in Mathematical Physics. Developments in Mathematical Physics 1988, 111–149. (In Japanese) [Google Scholar]
- Doi, M.; Edwards, S.F. The Theory of Polymer Dynamics; Oxford University Press: Oxford, UK, 1986. [Google Scholar]
- Koibuchi, H.; Sekino, H. Monte Carlo studies of a Finsler geometric surface model. Physica A 2014, 393, 37–50. [Google Scholar] [CrossRef] [Green Version]
- Proutorov, E.; Matsuyama, N.; Koibuchi, H. Finsler geometry modeling and Monte Carlo study of liquid crystal elastomer under electric fields. J. Phys. Condens. Matter. 2018, 30, 405101. [Google Scholar] [CrossRef] [PubMed]
- Metropolis, N.; Rosenbluth, A.W.; Rosenbluth, M.N.; Teller, A.H. Equation of State Calculations by Fast Computing Machines. J. Chem. Phys. 1953, 21, 1087–1092. [Google Scholar] [CrossRef]
- Landau, D.P. Finite-size behavior of the Ising square lattice. Phys. Rev. B 1976, 13, 2997–3011. [Google Scholar] [CrossRef]
- Landau, D.P. Monte Carlo studies of finite size effects at first and second order phase transitions. In Finite Size Scaling and Numerical Simulation of Statistical Systems; Privman, V., Ed.; World Scientific: Singapore, 1990; pp. 225–260. [Google Scholar]
- Binder, K. Finite size scaling analysis of ising model block distribution functions. Z. Phys. B 1981, 43, 119–140. [Google Scholar] [CrossRef]
- Challa, M.S.S.; Landau, D.P.; Binder, K. Finite-size effects at temperatur–driven first-order transitions. Phys. Rev. B 1986, 34, 1841–1852. [Google Scholar] [CrossRef]
- Coquand, O.; Essafi, K.; Kownacki, J.-P.; Mouhanna, D. Glassy phase in quenched disordered crystalline membranes. Phys. Rev. E 2017, 97, 030102. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | N | #Total (MCS) | #Therm (MCS) | |||||
|---|---|---|---|---|---|---|---|---|
| LG | 7351 | 10 | 24 | 0.1835 | 0.187 | |||
| LG | 5677 | 10 | 24 | 0.1842 | 0.1878 | |||
| LG | 4219 | 10 | 24 | 0.183 | 0.194 | |||
| LG | 2611 | 10 | 24 | 0.18 | 0.2 | |||
| cano | 44,287 | 20 | 24 | 0.766 | 0.782 | |||
| cano | 30,907 | 20 | 24 | 0.764 | 0.787 | |||
| cano | 20,917 | 20 | 24 | 0.762 | 0.792 | |||
| cano | 12,097 | 10 | 24 | 0.77 | 0.804 | |||
| modi | 20,917 | 20 | 24 | 0.451 | 0.467 | |||
| modi | 12,097 | 10 | 24 | 0.448 | 0.47 | |||
| modi | 7351 | 10 | 16 | 0.444 | 0.476 | |||
| modi | 4219 | 10 | 16 | 0.44 | 0.49 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shobukhov, A.; Koibuchi, H. Parallel Tempering Monte Carlo Studies of Phase Transition of Free Boundary Planar Surfaces. Polymers 2018, 10, 1360. https://doi.org/10.3390/polym10121360
Shobukhov A, Koibuchi H. Parallel Tempering Monte Carlo Studies of Phase Transition of Free Boundary Planar Surfaces. Polymers. 2018; 10(12):1360. https://doi.org/10.3390/polym10121360
Chicago/Turabian StyleShobukhov, Andrey, and Hiroshi Koibuchi. 2018. "Parallel Tempering Monte Carlo Studies of Phase Transition of Free Boundary Planar Surfaces" Polymers 10, no. 12: 1360. https://doi.org/10.3390/polym10121360
APA StyleShobukhov, A., & Koibuchi, H. (2018). Parallel Tempering Monte Carlo Studies of Phase Transition of Free Boundary Planar Surfaces. Polymers, 10(12), 1360. https://doi.org/10.3390/polym10121360