
Fabrication of Bilayer Magnetically Actuated L-Shaped Microrobot Based on Chitosan via Photolithography


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Fabrication of Chitosan-Based Microrobots
2.2.1. Preparation of Photo-Crosslinkable Chitosan Solution
2.2.2. Preparation of Magnetic Solution
2.2.3. Design of Microrobots
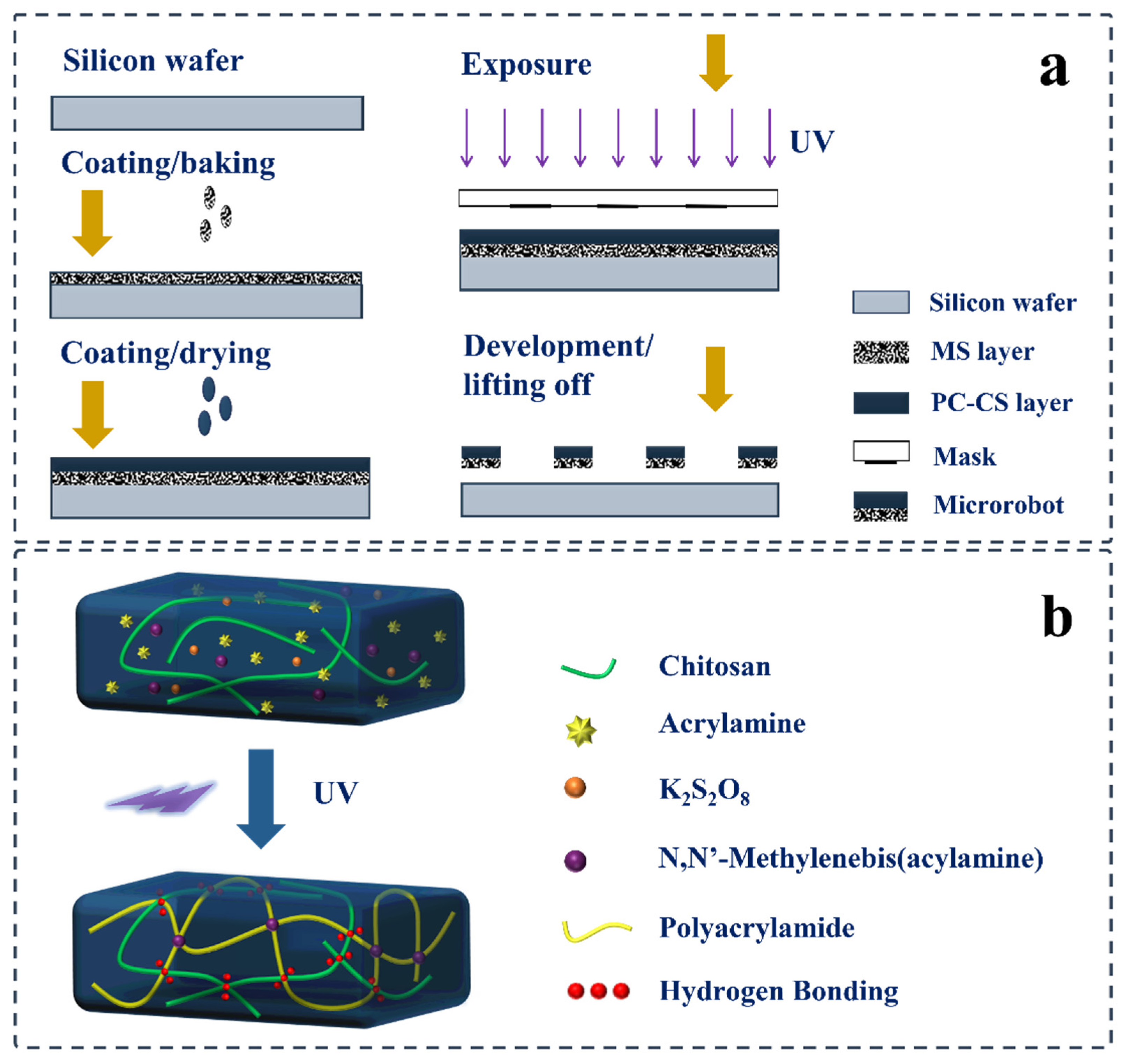
2.2.4. Fabrication Procedure for the Microrobots
2.3. Characterization
2.4. Motion Test of the Microrobots
2.5. In Vitro Cytotoxicity
3. Results
3.1. Fabrication of the Microrobots
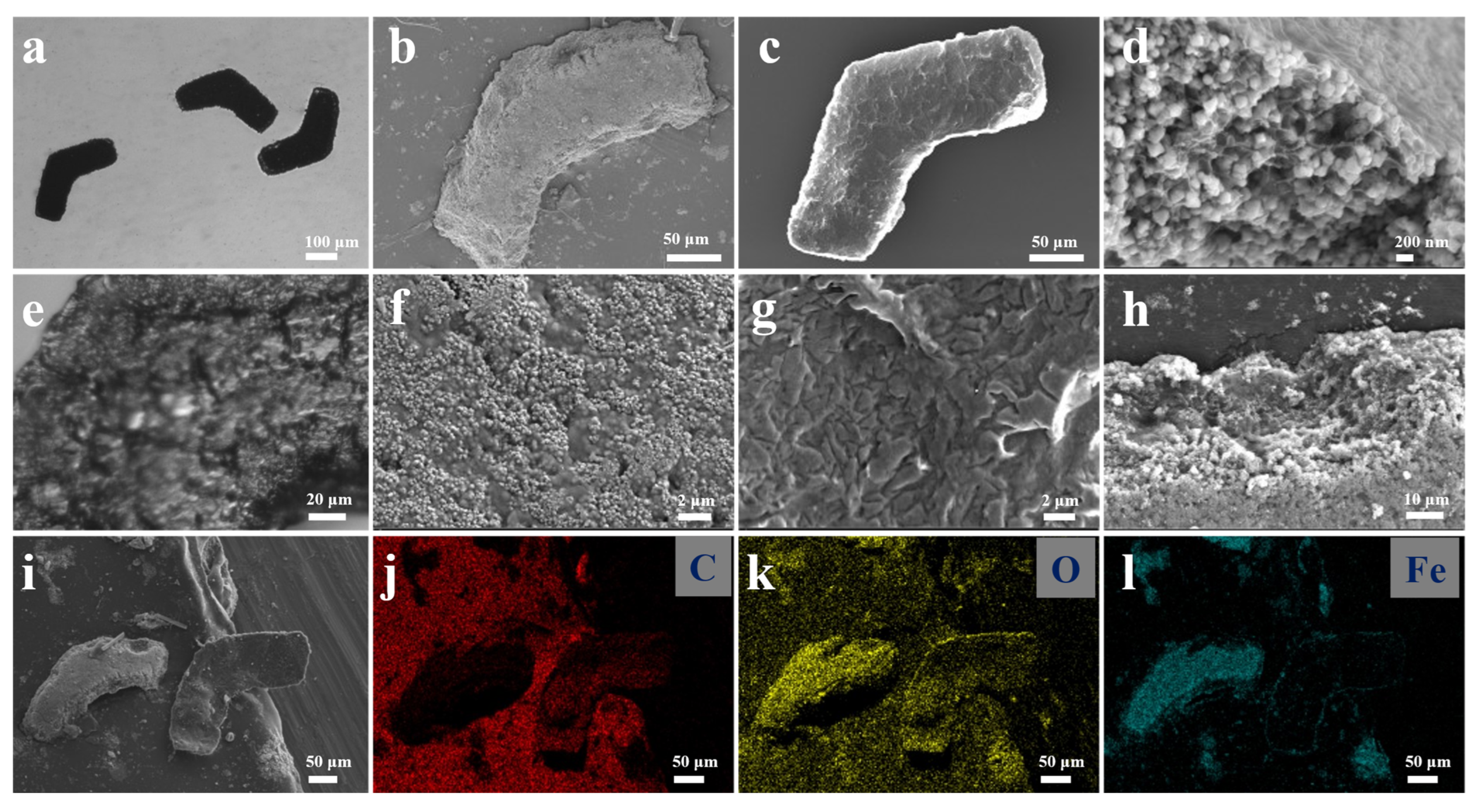
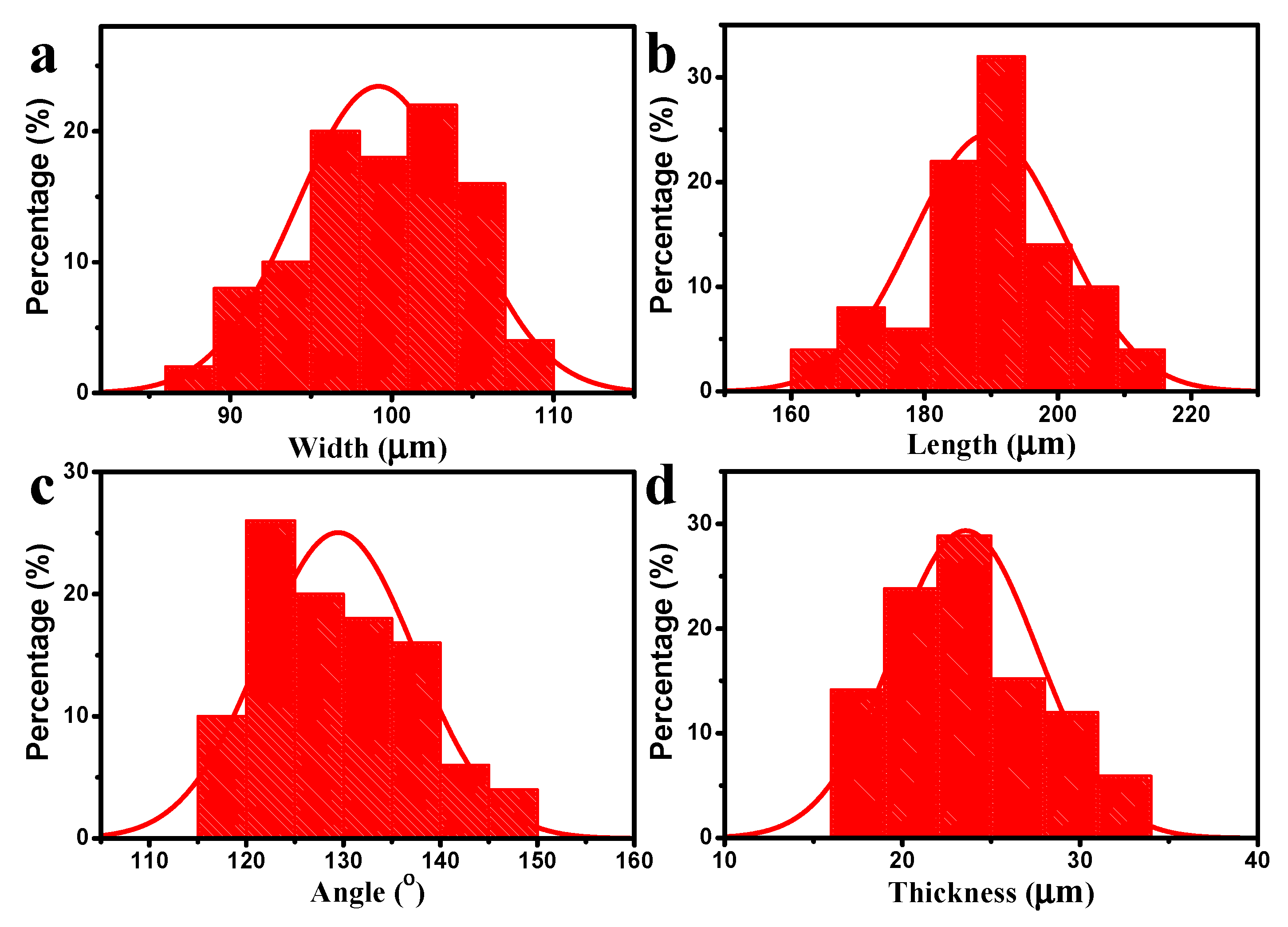
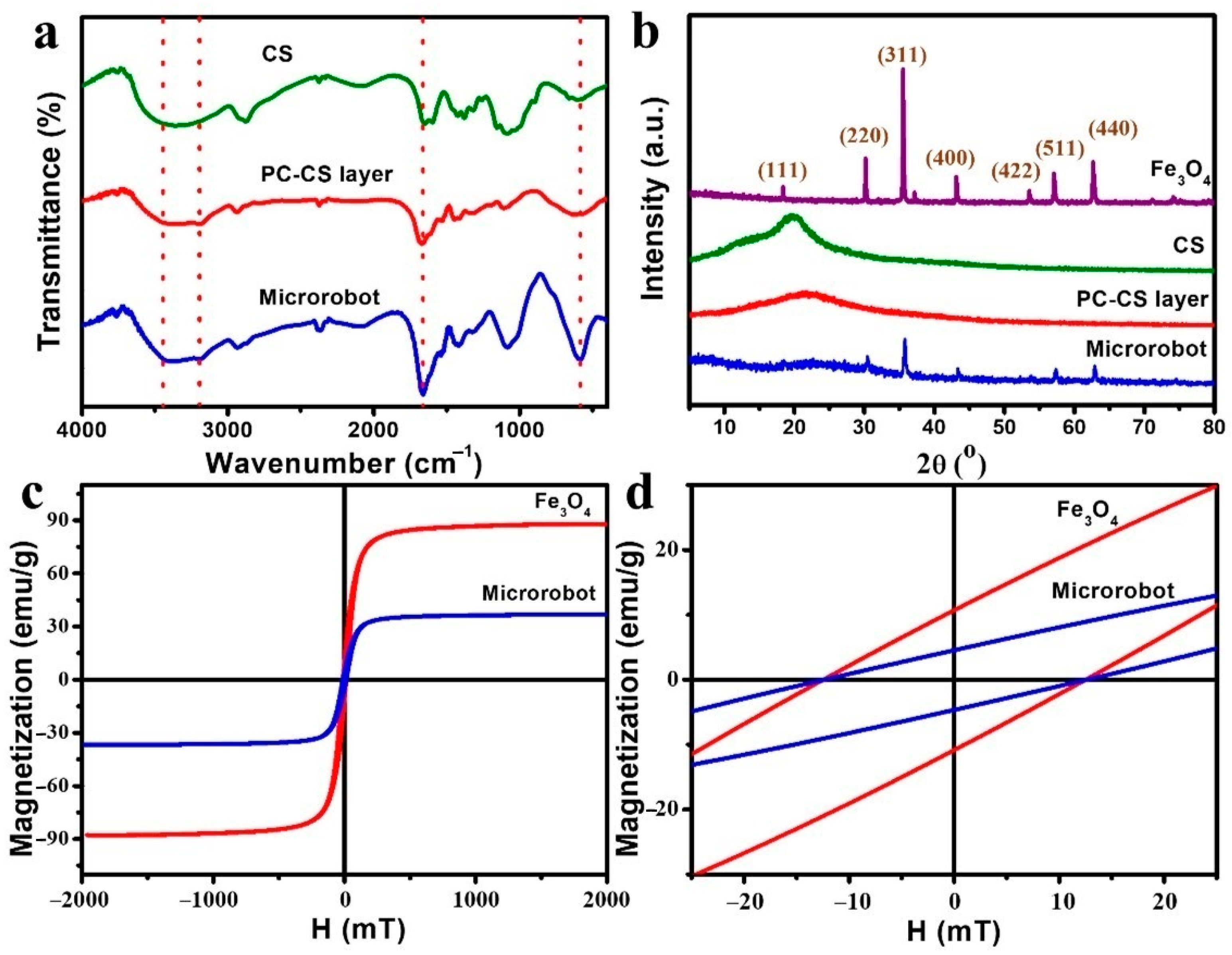
3.2. Structure of the Microrobots
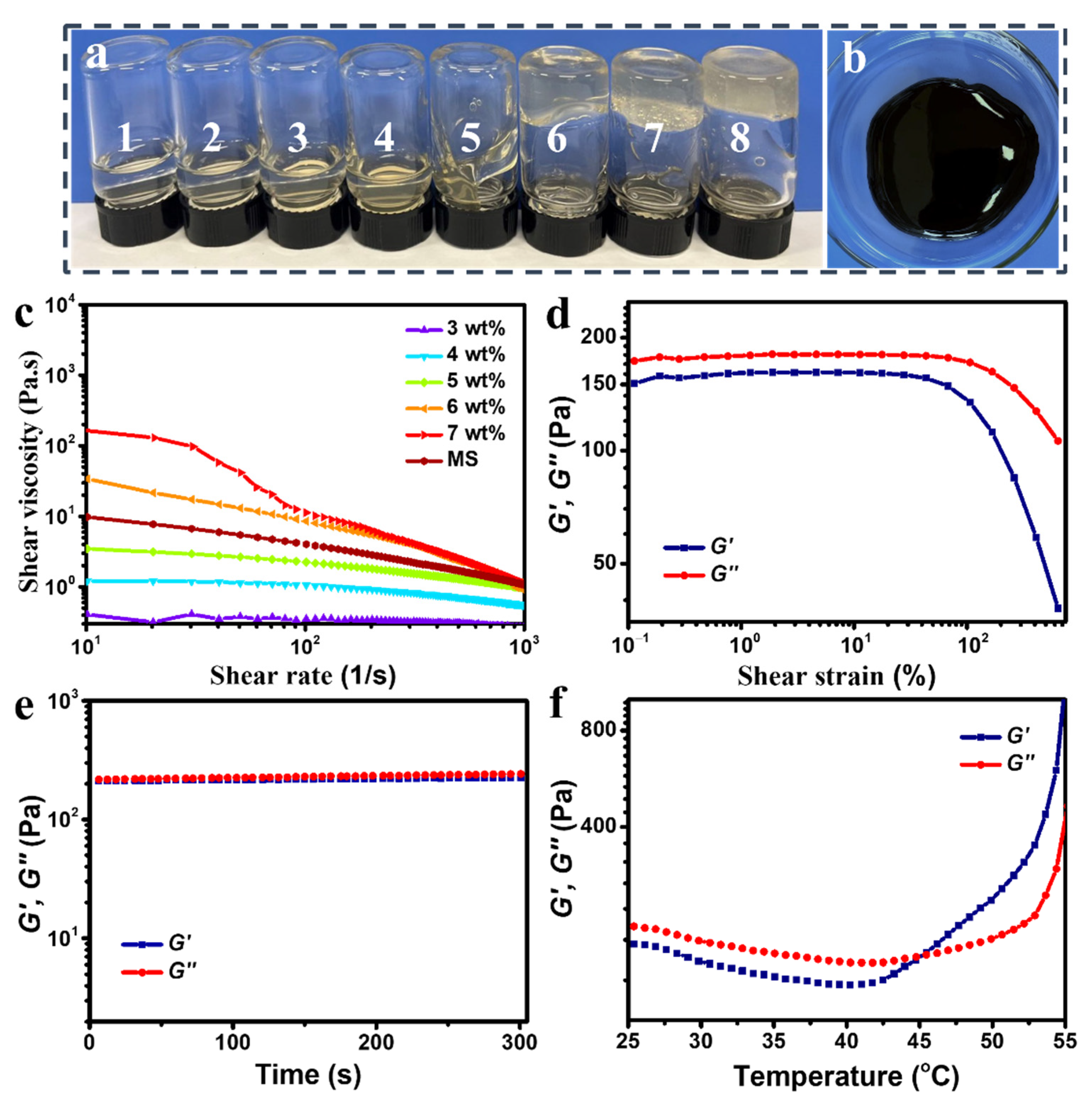
3.3. Physiochemical Property of the Microrobot
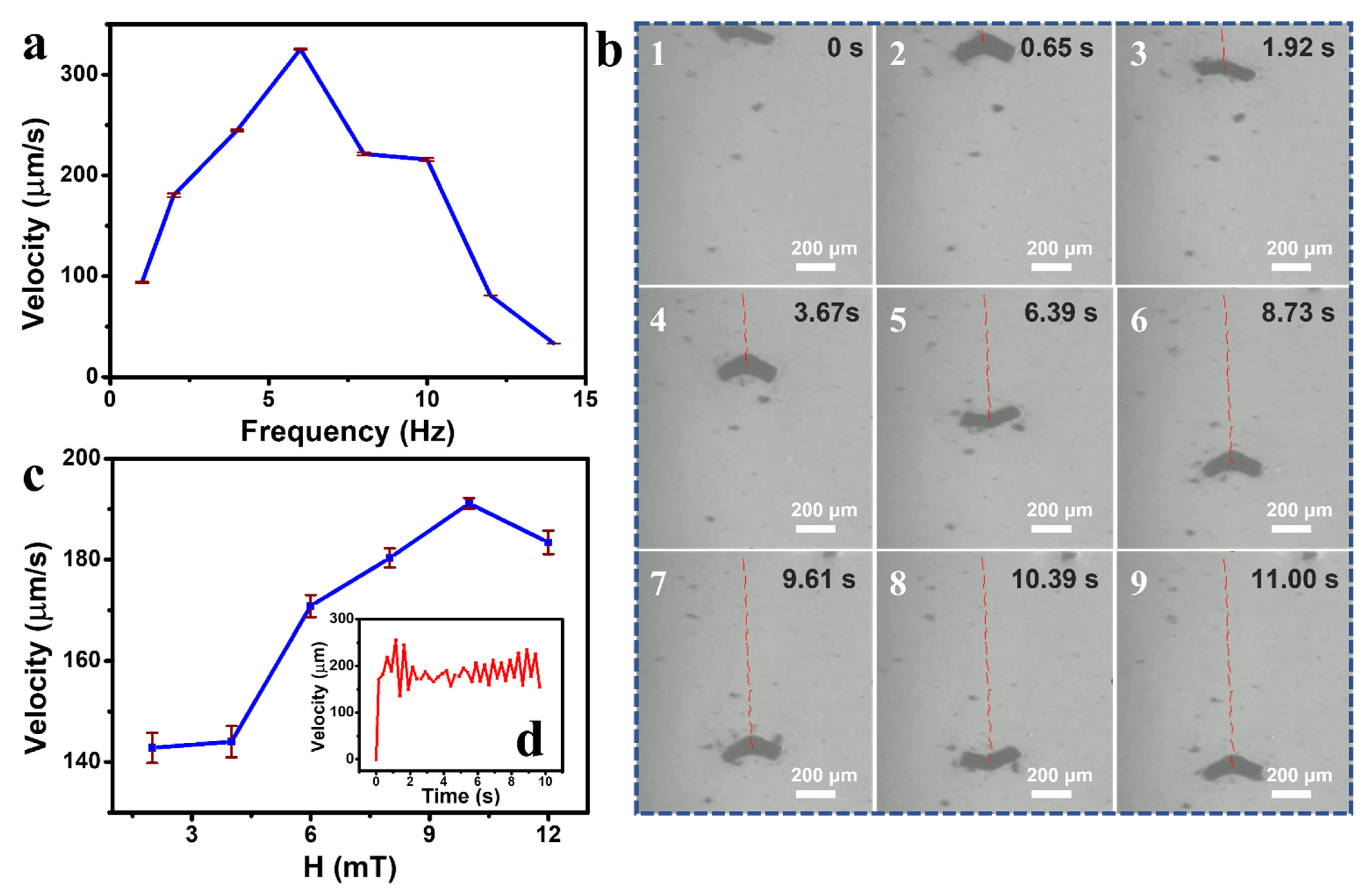
3.4. Motion of Microrobots
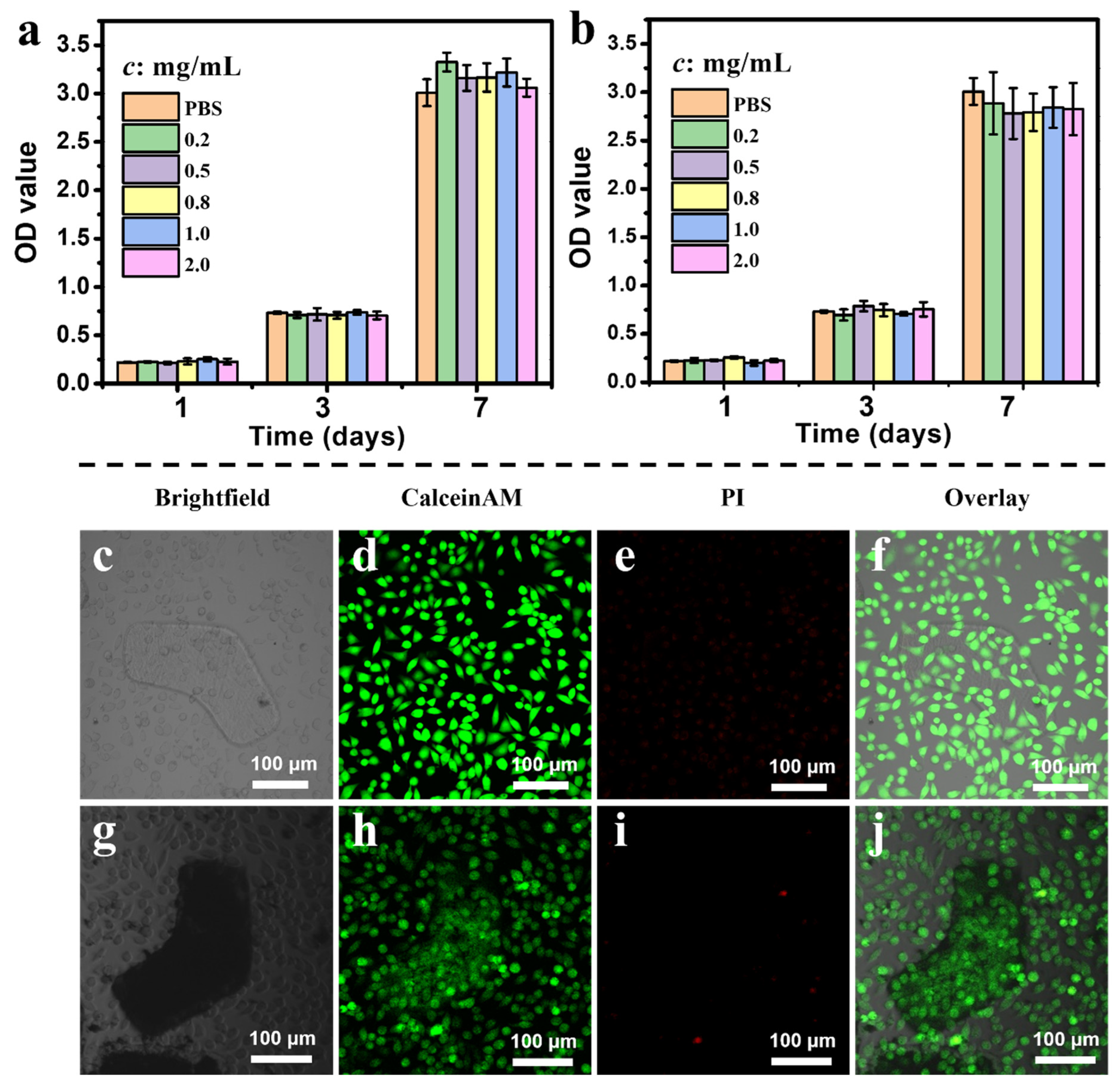
3.5. Biocompatibility of Microrobot
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, B.; Kostarelos, K.; Nelson, B.J.; Zhang, L. Trends in Micro-/Nanorobotics: Materials Development, Actuation, Localization, and System Integration for Biomedical Applications. Adv. Mater. 2021, 33, 2002047. [Google Scholar] [CrossRef]
- Soto, F.; Karshalev, E.; Zhang, F.; Esteban Fernandez de Avila, B.; Nourhani, A.; Wang, J. Smart Materials for Microrobots. Chem. Rev. 2022, 122, 5365–5403. [Google Scholar] [CrossRef]
- Ceylan, H.; Yasa, I.C.; Kilic, U.; Hu, W.; Sitti, M. Translational Prospects of Untethered Medical Microrobots. Prog. Biomed. Eng. 2019, 1, 012002. [Google Scholar] [CrossRef]
- Darzi, S.A.; Munz, Y. The Impact of Minimally Invasive Surgical Techniques. Annu. Rev. Med. 2004, 55, 223–237. [Google Scholar] [CrossRef]
- Soto, F.; Wang, J.; Ahmed, R.; Demirci, U. Medical Micro/Nanorobots in Precision Medicine. Adv. Sci. 2020, 7, 2002203. [Google Scholar] [CrossRef]
- Bunea, A.I.; Taboryski, R. Recent Advances in Microswimmers for Biomedical Applications. Micromachines 2020, 11, 1048. [Google Scholar] [CrossRef]
- Sitti, M. Miniature Devices: Voyage of the Microrobots. Nature 2009, 458, 1121–1122. [Google Scholar] [CrossRef]
- Ebrahimi, N.; Bi, C.; Cappelleri, D.J.; Ciuti, G.; Conn, A.T.; Faivre, D.; Habibi, N.; Hošovský, A.; Iacovacci, V.; Khalil, I.S.M.; et al. Magnetic Actuation Methods in Bio/Soft Robotics. Adv. Funct. Mater. 2021, 31, 2005137. [Google Scholar] [CrossRef]
- Liao, P.; Xing, L.; Zhang, S.; Sun, D. Magnetically Driven Undulatory Microswimmers Integrating Multiple Rigid Segments. Small 2019, 15, 1901197. [Google Scholar] [CrossRef]
- Hartmann, F.; Baumgartner, M.; Kaltenbrunner, M. Becoming Sustainable, The New Frontier in Soft Robotics. Adv. Mater. 2021, 33, 2004413. [Google Scholar] [CrossRef]
- Chen, Z.; Lee, J.B. Biocompatibility of Su-8 and Its Biomedical Device Applications. Micromachines 2021, 12, 794. [Google Scholar] [CrossRef]
- Genchi, G.; Carocci, A.; Lauria, G.; Sinicropi, M.S.; Catalano, A. Nickel: Human Health and Environmental Toxicology. Int. J. Environ. Res. Public Health 2020, 17, 679. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Dong, Y.; Ma, P.; Wang, Y.; Zhang, F.; Cai, B.; Chen, P.; Liu, B.F. Intelligent Micro-/Nanorobots for Cancer Theragnostic. Adv. Mater. 2022, 2201051. [Google Scholar] [CrossRef]
- Llacer-Wintle, J.; Rivas-Dapena, A.; Chen, X.Z.; Pellicer, E.; Nelson, B.J.; Puigmartí-Luis, J.; Pané, S. Biodegradable Small-Scale Swimmers for Biomedical Applications. Adv. Mater. 2021, 33, 2102049. [Google Scholar] [CrossRef]
- Choi, J.; Hwang, J.; Kim, J.; Choi, H. Recent Progress in Magnetically Actuated Microrobots for Targeted Delivery of Therapeutic Agents. Adv. Healthc. Mater. 2021, 10, 2001596. [Google Scholar] [CrossRef]
- Wu, Z.; Wu, Y.; He, W.; Lin, X.; Sun, J.; He, Q. Self-Propelled Polymer-Based Multilayer Nanorockets for Transportation and Drug Release. Angew. Chemie-Int. Ed. 2013, 52, 7000–7003. [Google Scholar] [CrossRef]
- Bakshi, P.S.; Selvakumar, D.; Kadirvelu, K.; Kumar, N.S. Chitosan as an Environment Friendly Biomaterial–A Review on Recent Modifications and Applications. Int. J. Biol. Macromol. 2020, 150, 1072–1083. [Google Scholar] [CrossRef]
- Hamedi, H.; Moradi, S.; Hudson, S.M.; Tonelli, A.E. Chitosan Based Hydrogels and Their Applications for Drug Delivery in Wound Dressings: A Review. Carbohydr. Polym. 2018, 199, 445–460. [Google Scholar] [CrossRef]
- Rinaudo, M. Chitin and Chitosan: Properties and Applications. Prog. Polym. Sci. 2006, 31, 603–632. [Google Scholar] [CrossRef]
- Zeng, J.; He, Y.; Li, S.; Wang, Y. Chitin Whiskers: An Overview. Biomacromolecules 2012, 13, 1–11. [Google Scholar] [CrossRef]
- Shariatinia, Z. Pharmaceutical Applications of Chitosan Wound Healing Food Additives. Adv. Colloid Interface Sci. 2019, 263, 131–194. [Google Scholar] [CrossRef]
- Fusco, S.; Chatzipirpiridis, G.; Sivaraman, K.M.; Ergeneman, O.; Nelson, B.J.; Pané, S.; Fusco, S.; Chatzipirpiridis, G.; Sivaraman, K.M.; Ergeneman, O.; et al. Chitosan Electrodeposition for Microrobotic Drug Delivery. Adv. Healthc. Mater. 2013, 2, 1037–1044. [Google Scholar] [CrossRef]
- Go, G.; Yoo, A.; Song, H.W.; Min, H.K.; Zheng, S.; Nguyen, K.T.; Kim, S.; Kang, B.; Hong, A.; Kim, C.S.; et al. Multifunctional Biodegradable Microrobot with Programmable Morphology for Biomedical Applications. ACS Nano 2021, 15, 1059–1076. [Google Scholar] [CrossRef]
- Chen, W.; Sun, M.; Fan, X.; Xie, H. Magnetic/PH-Sensitive Double-Layer Microrobots for Drug Delivery and Sustained Release. Appl. Mater. Today 2020, 19, 100583. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, Y.; Yang, X.; Yang, L.; Shen, Y.; Shang, W. Multi-Functionalized Micro-Helical Capsule Robots with Superior Loading and Releasing Capabilities. J. Mater. Chem. B 2021, 9, 1441–1451. [Google Scholar] [CrossRef]
- Bozuyuk, U.; Yasa, O.; Yasa, I.C.; Ceylan, H.; Kizilel, S.; Sitti, M. Light-Triggered Drug Release from 3D-Printed Magnetic Chitosan Microswimmers. ACS Nano 2018, 12, 9617–9625. [Google Scholar] [CrossRef]
- Palagi, S.; Fischer, P. Bioinspired Microrobots. Nat. Rev. Mater. 2018, 3, 113–124. [Google Scholar] [CrossRef]
- Bakenecker, A.C.; von Gladiss, A.; Schwenke, H.; Behrends, A.; Friedrich, T.; Lüdtke-Buzug, K.; Neumann, A.; Barkhausen, J.; Wegner, F.; Buzug, T.M. Navigation of a magnetic micro-robot through a Cerebral Aneurysm Phantom with Magnetic Particle Imaging. Sci. Rep. 2021, 11, 14082. [Google Scholar] [CrossRef]
- Ahmed, D.; Hauri, D.; Sukhov, A.; Rodrigue, D.; Gian, M.; Harting, J.; Nelson, B. Bio-Inspired Acousto-Magnetic Microswarm Robots with Upstream Motility. Nat. Mach. Intell. 2021, 3, 116–124. [Google Scholar] [CrossRef]
- Erin, O.; Alici, C.; Sitti, M. Design, Actuation, and Control of an MRI-Powered Untethered Robot for Wireless Capsule Endoscopy. IEEE Robot. Autom. Lett. 2021, 6, 6000–6007. [Google Scholar] [CrossRef]
- Hong, C.; Ren, Z.; Wang, C.; Li, M.; Wu, Y.; Tang, D.; Hu, W.; Sitti, M. Magnetically Actuated Gearbox for the Wireless Control of Millimeter-Scale Robots. Sci. Robot. 2022, 7, eabo4401. [Google Scholar] [CrossRef] [PubMed]
- Sitti, M.; Wiersma, D.S. Pros and Cons: Magnetic versus Optical Microrobots. Adv. Mater. 2020, 32, 1906766. [Google Scholar] [CrossRef] [PubMed]
- Purcell, E.M. Life at Low Reynolds Number. Am. J. Phys. 1977, 45, 3. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Dong, D.; Lam, W.; Xing, L.; Wei, T.; Sun, D. Automated in Vivo Navigation of Magnetic-Driven Microrobots Using OCT Imaging Feedback. IEEE Trans. Biomed. Eng. 2020, 67, 2349–2358. [Google Scholar] [CrossRef]
- Chen, X.Z.; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, B.J.; Pané, S. Recent Developments in Magnetically Driven Micro- and Nanorobots. Appl. Mater. Today 2017, 9, 37–48. [Google Scholar] [CrossRef] [Green Version]
- Xu, T.; Yu, J.; Yan, X.; Choi, H.; Zhang, L. Magnetic Actuation Based Motion Control for Microrobots: An Overview. Micromachines 2015, 6, 1346–1364. [Google Scholar] [CrossRef]
- Wang, W.; Wu, Z.; Yang, L.; Si, T.; He, Q. Rational Design of Polymer Conical Nanoswimmers with Upstream Motility. ACS Nano 2022, 16, 9317–9328. [Google Scholar] [CrossRef]
- Dong, Y.; Ramey-Ward, A.N.; Salaita, K. Programmable Mechanically Active Hydrogel-Based Materials. Adv. Mater. 2021, 33, 2006600. [Google Scholar] [CrossRef]
- Zhang, L.; Qu, S.; Du, X. Intelligent Soft Actuators and Flexible Devices. Adv. Intell. Syst. 2021, 3, 2100173. [Google Scholar] [CrossRef]
- Ali, J.; Cheang, U.K.; Darvish, A.; Kim, H.; Kim, M.J. Biotemplated Flagellar Nanoswimmers. APL Mater. 2017, 5, 116106. [Google Scholar] [CrossRef]
- Zhao, D.; Yang, J.; Wang, Y.; Yu, C.; Jiang, Y.; Wang, S.; Fukuda, T. Multiple Welfare-Robots Architecture of Smart House for Security Assistance of Daily Activities. In Proceedings of the 2018 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Shenyang, China, 24–27 August 2018; pp. 595–601. [Google Scholar] [CrossRef]
- Dabbagh, S.R.; Sarabi, M.R.; Birtek, M.T.; Seyfi, S.; Sitti, M.; Tasoglu, S. 3D-Printed Microrobots from Design to Translation. Nat. Commun. 2022, 13, 5875. [Google Scholar] [CrossRef] [PubMed]
- Sugahara, T.; Ekubaru, Y.; Nong, N.V.; Kagami, N.; Ohata, K.; Hung, L.T.; Okajima, M.; Nambu, S.; Suganuma, K. Fabrication with Semiconductor Packaging Technologies and Characterization of a Large-Scale Flexible Thermoelectric Module. Adv. Mater. Technol. 2019, 4, 1800556. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Z.; Quashie, D.; Benhal, P.; Ali, J.; Kim, M.J.; Cheang, U.K. Propulsion of Magnetically Actuated Achiral Planar Microswimmers in Newtonian and Non-Newtonian Fluids. Sci. Rep. 2021, 11, 21190. [Google Scholar] [CrossRef] [PubMed]
- Mirzae, Y.; Dubrovski, O.; Kenneth, O.; Morozov, K.I.; Leshansky, A.M. Geometric Constraints and Optimization in Externally Driven Propulsion. Sci. Robot. 2018, 3, eaas8713. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheang, U.K.; Dejan, M.; Choi, J.; Kim, M. Towards Model-Based Control of Achiral Microswimmers. In Proceedings of the ASME 2014 Dynamic Systems and Control Conference, San Antonio, TX, USA, 22–24 October 2014; Volume 2, p. V002T33A002. [Google Scholar] [CrossRef]
- Tan, L.; Ali, J.; Cheang, U.K.; Shi, X.; Kim, D.; Kim, M.J. μ-PIV Measurements of Flows Generated by Photolithography-Fabricated Achiral Microswimmers. Micromachines 2019, 10, 865. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lawrence, C.J.; Zhou, W. Spin Coating of Non-Newtonian Fluids. J. Nonnewton. Fluid Mech. 1991, 39, 137–187. [Google Scholar] [CrossRef]
- Noh, S.; Jeon, S.; Kim, E.; Oh, U.; Park, D.; Park, S.H.; Kim, S.W.; Pané, S.; Nelson, B.J.; Kim, J.Y.; et al. A Biodegradable Magnetic Microrobot Based on Gelatin Methacrylate for Precise Delivery of Stem Cells with Mass Production Capability. Small 2022, 18, 2107888. [Google Scholar] [CrossRef]
- Cheang, U.K.; Meshkati, F.; Kim, D.; Kim, M.J.; Fu, H.C. Minimal Geometric Requirements for Micropropulsion via Magnetic Rotation. Phys. Rev. E-Stat. Nonlinear Soft Matter Phys. 2014, 90, 033007. [Google Scholar] [CrossRef]
- Kei Cheang, U.; Lee, K.; Julius, A.A.; Kim, M.J. Multiple-Robot Drug Delivery Strategy through Coordinated Teams of Microswimmers. Appl. Phys. Lett. 2014, 105, 083705. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Song, X.; Xiong, J.; Cheang, U.K. Fabrication of Bilayer Magnetically Actuated L-Shaped Microrobot Based on Chitosan via Photolithography. Polymers 2022, 14, 5509. https://doi.org/10.3390/polym14245509
Wang H, Song X, Xiong J, Cheang UK. Fabrication of Bilayer Magnetically Actuated L-Shaped Microrobot Based on Chitosan via Photolithography. Polymers. 2022; 14(24):5509. https://doi.org/10.3390/polym14245509
Chicago/Turabian StyleWang, Haoying, Xiaoxia Song, Junfeng Xiong, and U Kei Cheang. 2022. "Fabrication of Bilayer Magnetically Actuated L-Shaped Microrobot Based on Chitosan via Photolithography" Polymers 14, no. 24: 5509. https://doi.org/10.3390/polym14245509
APA StyleWang, H., Song, X., Xiong, J., & Cheang, U. K. (2022). Fabrication of Bilayer Magnetically Actuated L-Shaped Microrobot Based on Chitosan via Photolithography. Polymers, 14(24), 5509. https://doi.org/10.3390/polym14245509