
Agile Development of Polymer Power Transmission Systems for e-Mobility—A Novel Methodology Based on an e-Bike Drive Case Study





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Blending of Agile and Stage-Gate Methodology at Physical Product Development
1.2. Prototyping and Agile Methods
1.3. Research and Development Challenges in the e-Mobility Sector
2. Project Description and Applied Methods
- Analysis of the team composition based on the Scrum framework.
- Review of the APD-based product development process and the influence of sudden specification changes on the process.
- Specifics of polymer gears development following the APD framework.
- Critical review of the communication model in correlation with the considered Scrum method.
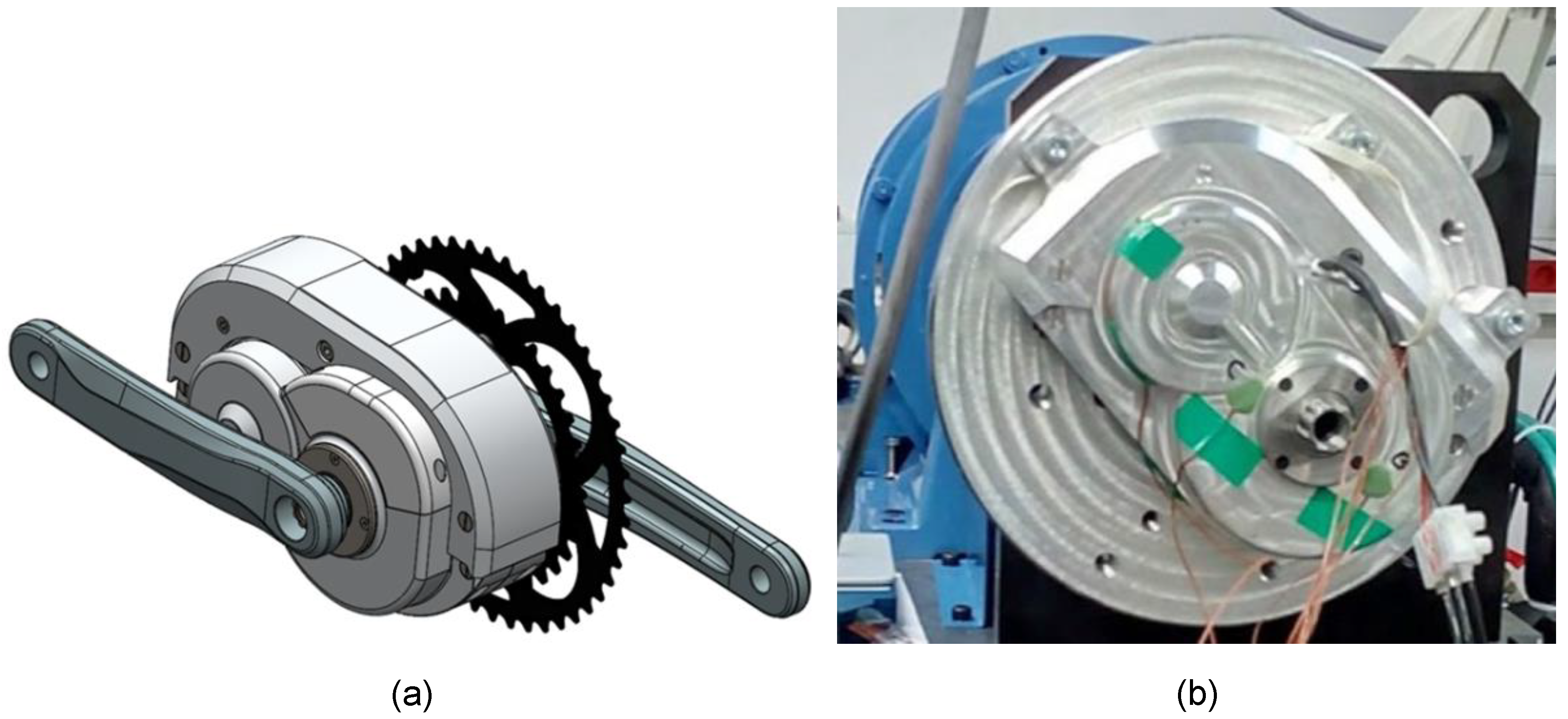
2.1. Project Background
2.2. Team Composition
- Sub-team P1: Project coordination, system design, motor design with electronic commutation, powertrain durability testing.
- Sub-team P2/customer: system design, power source and wiring, analysis of customer requirements (bikes manufacturers)
- Sub-team P3: Powertrain R&D (including polymer gearbox)—the authors were part of this team.
- Sub-team P4: Development of the torque sensor
- Sub-team P5: Development of electronics and control system
2.3. Modifications to the Technical Requirements
2.4. The Development Process
Development of Polymer Gear Transmissions
2.5. Communication
3. Results
3.1. Identification of Key Problems in the Development Process
- Testing of the developed product using prototypes is of paramount importance. Producing a physical prototype is time-consuming and costly and can result in project delays if a large number of prototype iterations are required. Virtual prototypes can often successfully replace physical prototypes, provided that the underlying assumptions of the used physical models have been suitably validated.
- While initial specifications were accurately defined, these often changed based on new insights gained by the customer either following their internal market analyses or after the presentation of intermediate physical prototypes by the development team. Several changes occurred fairly late in the project resulting in further delay. Using virtual prototypes to convey new important design changes can help the customer understand more quickly what their actual requirements are and iterate to the final solution faster.
- To confirm that newly introduced solutions are technically suitable, virtual prototypes have their limitations, and physical testing is often required. Partial physical prototypes proved critical to determine if a function (e.g., one-way clutch transmission, planetary gear, sealing, etc.) was successfully met. To test and confirm critical components and sub-assemblies more quickly with partial physical prototypes, access to rapid prototyping tools that enable component production of comparable quality to conventional production methods is essential.
- The response to changes in customer requirements was often too slow. Adapting to intermediate specification changes can only be conducted in a quick and responsive fashion if modern CAD/CAE software tools are systematically used to develop and numerically test new VP iterations and then transition to physical prototypes. Using suitable parametrization methods for quick model updates and numerical simulation checks, combined the model-based definition approach (MBD) to transition seamlessly from model to production can yield quicker prototype iterations.
- Only after the mechanical system of the e-bike drive was developed, the electronics necessary for system power supply and control could begin to be tested. This could have been avoided, i.e., the electronics could be tested in parallel with the mechanics, if a suitable prototype testbed replicating the e-bike operation conditions was available for this purpose.
- While regular meetings were scheduled during the project to help keep all members of the various STs informed, they were often too broad in scope, regularly including all or most of the STs involved and covering a wide range of topics that often did not directly affect all STs. Broader meetings should be time-limited and only serve to define what needs to be done, not discuss problems. Issues are then discussed in more detail within each ST or among the STs involved.
- The project backlog and reviews of each development cycle—both in terms of design updates and new knowledge gained—were often poorly managed, contributing to slower than optimal project progress. Implementing appropriate (web-based) tools and methods for regularly updating and sharing the latest relevant information is especially important when the parties involved are from different organizations across wide geographical areas. In the project described, the flow of information proved to be suboptimal, as information was not exchanged directly and quickly enough between the parties involved.
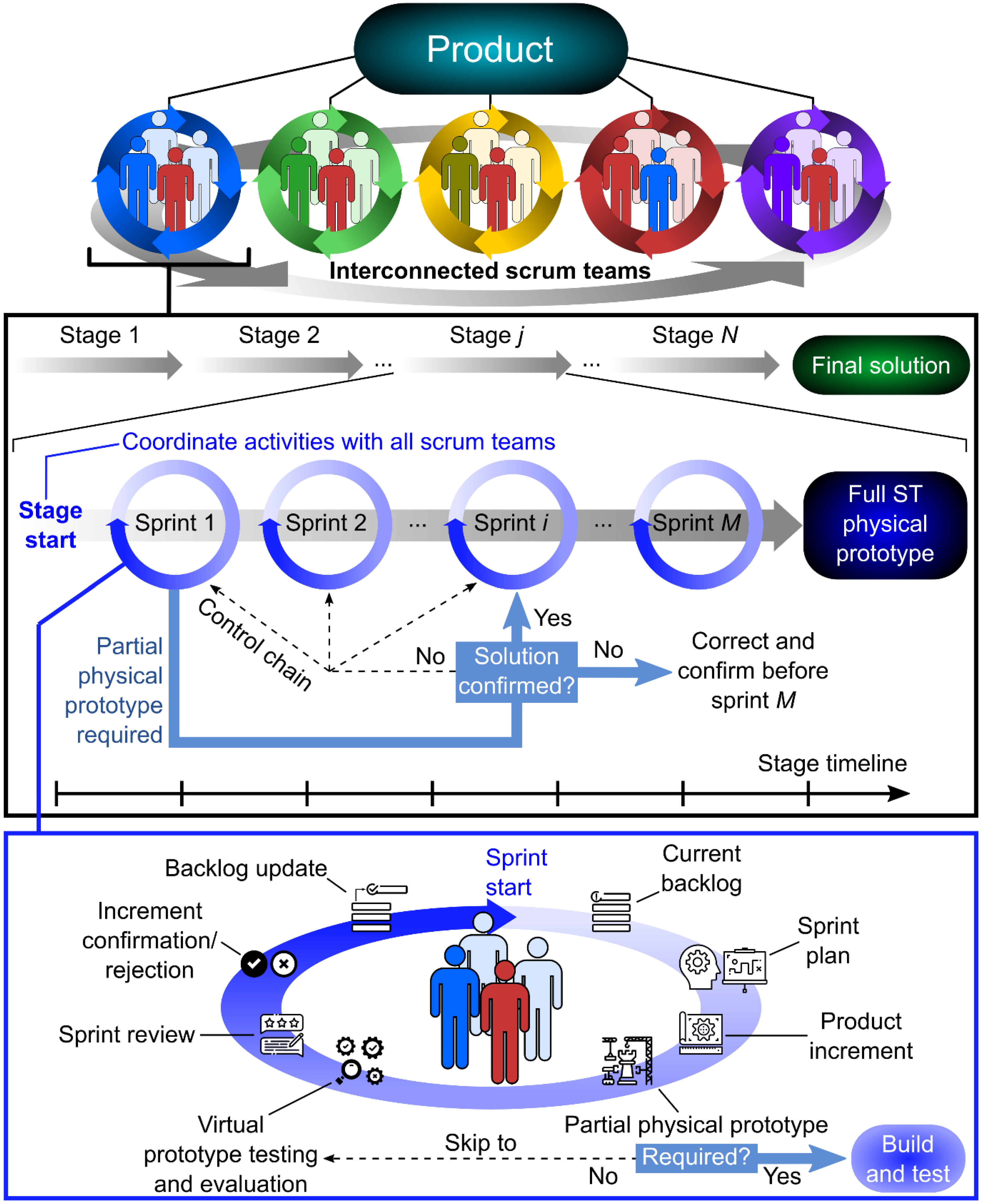
3.2. Agile Approach to the Development of Polymer Power Transmissions
- The product is divided into individual sets that are interdependent and ultimately make up the entire system but can also be developed individually and simultaneously to a certain extent.
- Teams are composed of members with specific skills required to develop each set. Work on individual sets should take place within an appropriate agile framework. In the case studied, Scrum proves to be a suitable basis.
- The product development team needs to be supported with key skills such as polymer gear design. Necessary research must be conducted in parallel with a simplified and generic model to reduce time and complexity (if possible).
- The results of each iteration/sprint must be evaluated accordingly. Numerical simulations (Finite Element Analysis—FEA) and engineering tools such as FMEA (Failure Mode and Effects Analysis) and DoE (Design of Experiments) can be employed to assess the virtual prototypes. Features that cannot be evaluated on the virtual prototype are tested on a physical prototype. The physical prototype needs to be adapted to the testing purpose.
- Continuous product testing is essential. This is divided into the following two categories:
- ▪
- Functional testing is carried out at four levels and takes place before testing at the customer’s premises: (I). Virtual prototype testing, (II). Testing of partial physical prototypes (e.g.,: Testing polymer gearboxes), (III). Testing full physical prototypes of each stage and (IV). Testing of the whole product (full physical prototype—combined results of all stages).
- ▪
- A full physical prototype is required for functional testing of the product. The prototype merges the results of successful phases of all Scrum Teams. The production of the prototype is time consuming and usually involves high costs. Individual product subassemblies are interconnected but are not always needed for testing in all phases. Some tests can be performed on prototypes that only cover the R&D work of a single scrum team or a limited number of Scrum Teams.
- ▪
- The result of each sprint is an updated virtual prototype. A set of fully functional virtual prototypes can be assembled into a comprehensive virtual prototype that can be shown to the customers (augmented or virtual reality can be used at this stage). By reviewing the customer feedback, the necessary changes that lead to a higher product value are identified. Customer feedback must be taken into account in the next sprint. It is especially important to communicate with customers in the earlier phases and present updated results (and thus determine what customers want).
- ▪
- Identify modules or submodules that can be further developed while waiting for production and test results of a physical prototype. Optimal parallelization of development tasks is the goal.
- ▪
- There are several critical issues to consider when developing a completely new, complex physical product. If ST does not master these, it may not be able to meet the required product specifications. External revisions can provide new solutions and help bridge the critical points.
- ▪
- Information must be communicated comprehensively and as quickly as possible, without unnecessary noise. Short chains of communication usually prove to be the best.
3.3. Agile Approach to the Development of Polymer Gears
- Preliminary design of the gear based on the input data (simple calculation of the gears, material selection). If the selected polymer material pair already has known material properties, the procedure can be continued with Stage 3.
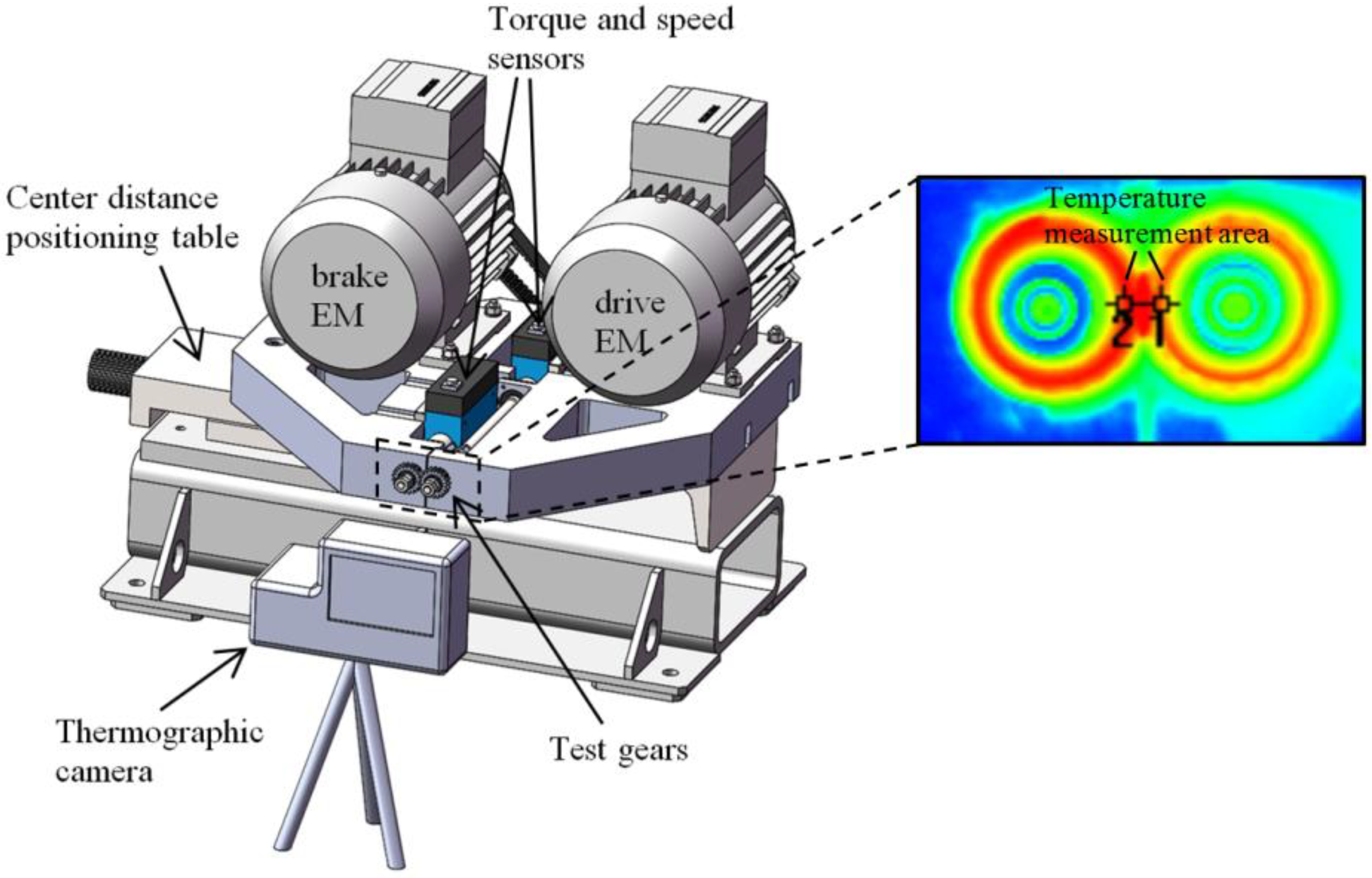
- Accelerated (step) tests. Preliminary step tests (increasing the torque level in several steps). The step test is a fast prediction of tribological properties and polymer strength and helps to identify the most promising material pairs, which are then followed up in life tests (durability tests). Coefficient of friction can be determined from operating parameters and measured temperature as presented in [69].
- Lifetime tests on a test bench with standard size gears (at selected speed and torque). The test is carried out with the pair of materials and under conditions close to those of the final product (speed, temperature). Wear, coefficient of friction and durability are properties, which depend on selected pair of materials. Durability tests of gears are the best indicators of material properties, which are important for the calculation of gears [72]. Material’s fatigue strength can be determined from the tested load level and gear geometry. The number of load cycles can be calculated from the test duration before failure and speed of rotation. Wear factor is assessed from measuring wear during durability test as presented by Zorko [68].
- Detailed calculation and design of polymer gears: well-defined material properties (Stage 2) enable reliable calculation of gears. This reduces the number of prototypes required.
- Testing of gears in the final application (product validation). The production of tools for injection molding is expensive and time-consuming. It is important to perform all the previous steps well and create the tools only once.
4. Discussion
Limitations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Duhovnik, J.; Tavčar, J. Concurrent Engineering in Machinery. In Concurrent Engineering in the 21st Century: Foundations, Developments and Challenges; Stjepandić, J., Wognum, N., Verhagen, W.J.C., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 639–670. [Google Scholar]
- Stjepandić, J.; Wognum, N.; Verhagen, W.J.C. Concurrent Engineering in the 21st Century; Springer International Publishing: Cham, Switzerland, 2015; ISBN 978-3-319-13775-9. [Google Scholar]
- Tavčar, J.; Demšar, I.; Duhovnik, J. Engineering Change Management Maturity Assessment Model with Lean Criteria for Automotive Supply Chain. J. Eng. Des. 2018, 29, 235–257. [Google Scholar] [CrossRef]
- Islam, G.; Storer, T. A Case Study of Agile Software Development for Safety-Critical Systems Projects. Reliab. Eng. Syst. Saf. 2020, 200, 106954. [Google Scholar] [CrossRef]
- Tam, C.; da Costa Moura, E.J.; Oliveira, T.; Varajão, J. The Factors Influencing the Success of On-Going Agile Software Development Projects. Int. J. Proj. Manag. 2020, 38, 165–176. [Google Scholar] [CrossRef]
- Younas, M.; Jawawi, D.N.A.; Ghani, I.; Fries, T.; Kazmi, R. Agile Development in the Cloud Computing Envi-Ronment: A Systematic Review. Inf. Softw. Technol. 2018, 103, 142–158. [Google Scholar] [CrossRef]
- Beck, K.M.; Beedle, M.; Bennekum, A.V.; Cockburn, A.; Cunningham, W.; Fowler, M.; Grenning, J.; Highsmith, J.; Hunt, A.; Jeffries, R.; et al. Manifesto for Agile Software Development. Available online: https://agilemanifesto.org/ (accessed on 19 November 2020).
- Leite, M.; Braz, V. Agile Manufacturing Practices for New Product Development: Industrial Case Studies. J. Manuf. Technol. Manag. 2016, 27, 560–576. [Google Scholar] [CrossRef]
- Leite, M.; Baptista, A.J.; Ribeiro, A.M.R. A road map for implementing lean and agile techniques in SMEs product development teams. IJPD 2016, 21, 20. [Google Scholar] [CrossRef] [Green Version]
- Potdar, P.K.; Routroy, S.; Behera, A. Agile Manufacturing: A Systematic Review of Literature and Implications for Future Research. Benchmarking Int. J. 2017, 24, 2022–2048. [Google Scholar] [CrossRef]
- Schwaber, K.; Sutherland, J. The Scrum Guide. The Definitive Guide to Scrum: The Rules of the Game. 2013, 268, 19. [Google Scholar]
- Ovesen, N. The Challenges of Becoming Agile: Implementing and Conducting Scrum in Integrated Product Development. Ph.D. Thesis, Department of Architecture & Design, Aalborg University, Aalborg, Denmark, 2012. [Google Scholar]
- Riesener, M.; Rebentisch, E.; Dölle, C.; Schloesser, S.; Kuhn, M.; Radermacher, J.; Schuh, G. A Model for Dependency-Oriented Prototyping in the Agile Development of Complex Technical Systems. Procedia CIRP 2019, 84, 8–10. [Google Scholar] [CrossRef]
- Sommer, A.F.; Hedegaard, C.; Dukovska-Popovska, I.; Steger-Jensen, K. Improved Product Development Performance through Agile/Stage-Gate Hybrids: The Next-Generation Stage-Gate Process? Res. Technol. Manag. 2015, 58, 34–45. [Google Scholar] [CrossRef] [Green Version]
- Cooper, R.G. Agile–Stage-Gate Hybrids. Res. Technol. Manag. 2016, 59, 21–29. [Google Scholar] [CrossRef]
- Karlstrom, D.; Runeson, P. Combining Agile Methods with Stage-Gate Project Management. IEEE Software 2005, 22, 43–49. [Google Scholar] [CrossRef]
- Cooper, R.G.; Sommer, A.F. Agile-Stage-Gate for Manufacturers. Res. Technol. Manag. 2018, 61, 17–26. [Google Scholar] [CrossRef]
- Asmar, L.; Rabe, M.; Low, C.Y.; Yee, J.; Kühn, A.; Dumitrescu, R. Framework for the Agile Development of Innovative Product Service-Systems for Existing Physical Rehabilitation Systems. Procedia Manuf. 2018, 24, 147–152. [Google Scholar] [CrossRef]
- Gary, C. Agile Project Management: How to Succeed in the Face of Changing Project Requirements; AMACOM: New York, NY, USA, 2004. [Google Scholar]
- Salvato, J.J.; Laplume, A.O. Agile Stage-Gate Management (ASGM) for Physical Products. R D Manag. 2020, 50, 631–647. [Google Scholar] [CrossRef]
- Hendler, S.; Boer, H. Digital-Physical Product Developments: A Review and Research Agenda. Int. J. Technol. Manag. 2019, 80, 12–35. [Google Scholar] [CrossRef]
- Hendler, S. Digital-Physical Product Development: A Qualitative Analysis. Eur. J. Innov. Manag. 2019, 25, 315–334. [Google Scholar] [CrossRef]
- Smith, P.G. Flexible Product Development: Building Agility for Changing Markets; Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Schuh, G.; Dölle, C.; Kantelberg, J.; Menges, A. Identification of Agile Mechanisms of Action as Basis for Agile Product Development. Procedia CIRP 2018, 70, 19–24. [Google Scholar] [CrossRef]
- Baschin, J.; Schneider, D.; Huth, T.; Vietor, T. Project-Oriented Selection of Agile Methods for the Design of Physical Products. In Proceedings of the 2021 IEEE International Conference on Industrial Engineering and Engineering Management (IEEE), Singapore, 13–16 December 2021; Vol. IEEM21. pp. 999–1003. [Google Scholar]
- Schmidt, T.S.; Paetzold, K. Maturity Assessment of Teams Developing Physical Products in An Agile Manner. In Proceedings of the 23rd International Conference on Engineering, Technology and Innovation (ICE/ITMC), Madeira Island, Portugal, 27–29 June 2017; pp. 237–245. [Google Scholar]
- Žužek, T.; Kušar, J.; Rihar, L.; Berlec, T. Agile-Concurrent Hybrid: A Framework for Concurrent Product de-Velopment Using Scrum. Concurr. Eng. Res. Appl. 2020, 28, 255–264. [Google Scholar] [CrossRef]
- Zink, L.; Bohmer, A.I.; Hostetter, R.; Lindemann, U.; Knoll, A. The Use of Prototypes Within Agile Product Development Explorative Case Study of a Makeathon. In Proceedings of the 23rd International Conference on Engineering, Technology and Innovation (ICE/ITMC), Madeira Island, Portugal, 27–29 June 2017; pp. 68–77. [Google Scholar]
- Reichwein, J.; Vogel, S.; Schork, S.; Kirchner, E. On the Applicability of Agile Development Methods to Design for Additive Manufacturing. Procedia CIRP 2020, 91, 653–658. [Google Scholar] [CrossRef]
- Vinodh, S.; Devadasan, S.R.; Maheshkumar, S.; Aravindakshan, M.; Arumugam, M.; Balakrishnan, K. Agile Product Development through CAD and Rapid Prototyping Technologies: An Examination in a Traditional Pump-Manufacturing Company. Int. J. Adv. Manuf. Technol. 2010, 46, 663–679. [Google Scholar] [CrossRef]
- Potdar, P.K.; Routroy, S. Analysis of Agile Manufacturing Enablers: A Case Study. Mater. Today Proc. 2018, 5, 4008–4015. [Google Scholar] [CrossRef]
- Stare, A. Agile Project Management in Product Development Projects. Procedia Soc. Behav. Sci. 2014, 119, 295–304. [Google Scholar] [CrossRef] [Green Version]
- Raj, S.A.; Sudheer, A.; Vinodh, S.; Anand, G. A Mathematical Model to Evaluate the Role of Agility Enablers and Criteria in a Manufacturing Environment. Int. J. Prod. Res. 2013, 51, 5971–5984. [Google Scholar] [CrossRef]
- Chen, J.; Reilly, R.R.; Lynn, G.S. New Product Development Speed: Too Much of a Good Thing? J. Prod. Innov. Manag. 2012, 29, 288–303. [Google Scholar] [CrossRef]
- Caban, J.; Vrabel, J.; Šarkan, B.; Zarajczyk, J.; Marczuk, A. Analysis of the Market of Electric Tractors in Agricultural Production. MATEC Web Conf. 2018, 244, 03005. [Google Scholar] [CrossRef] [Green Version]
- Živanović, Z.; Nikolic, Z. The Application of Electric Drive Technologies in City Buses. In New Generation of Electric Vehicles; IntechOpen: London, UK, 2012. [Google Scholar]
- Lie, T.T.; Prasad, K.; Ding, N. The Electric Vehicle: A Review. Int. J. Electr. Hybrid Veh. 2017, 9, 49. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Muratori, M.; Alexander, M.; Arent, D.; Bazilian, M.; Cazzola, P.; Dede, E.M.; Farrell, J.; Gearhart, C.; Greene, D.; Jenn, A.; et al. The Rise of Electric Vehicles—2020 Status and Future Expectations. Prog. Energy 2021, 3, 022002. [Google Scholar] [CrossRef]
- Fishman, E.; Cherry, C. E-Bikes in the Mainstream: Reviewing a Decade of Research. Transp. Rev. 2016, 36, 72–91. [Google Scholar] [CrossRef]
- Bourne, J.E.; Sauchelli, S.; Perry, R.; Page, A.; Leary, S.; England, C.; Cooper, A.R. Health Benefits of Electrically-Assisted Cycling: A Systematic Review. Int. J. Behav. Nutr. Phys. Act. 2018, 15, 116. [Google Scholar] [CrossRef] [PubMed]
- Salmeron-Manzano, E.; Manzano-Agugliaro, F. The Electric Bicycle: Worldwide Research Trends. Energies 2018, 11, 894. [Google Scholar] [CrossRef] [Green Version]
- Hung, N.B.; Lim, O. A Review of History, Development, Design and Research of Electric Bicycles. Appl. Energy 2020, 260, 114323. [Google Scholar] [CrossRef]
- Kazemzadeh, K.; Bansal, P. Electric Bike Level of Service: A Review and Research Agenda. Sustain. Cities Soc. 2021, 75, 103413. [Google Scholar] [CrossRef]
- Dižo, J.; Blatnický, M.; Melnik, R.; Karľa, M. Improvement of Steerability and Driving Safety of an Electric Three-Wheeled Vehicle by a Design Modification of Its Steering Mechanism. LOGI Sci. J. Transp. Logist. 2022, 13, 49–60. [Google Scholar] [CrossRef]
- Turoń, K.; Czech, P. The Concept of Rules and Recommendations for Riding Shared and Private E-Scooters in the Road Network in the Light of Global Problems. In Proceedings of the Modern Traffic Engineering in the System Approach to the Development of Traffic Networks, Katowice, Poland, 16–18 September 2019; Macioszek, E., Sierpiński, G., Eds.; Springer: Cham, Switzerland, 2020; pp. 275–284. [Google Scholar]
- Gogola, M. Are the E-Bikes More Dangerous than Traditional Bicycles? In Proceedings of the 2018 XI International Science-Technical Conference Automotive Safety, Častá, Slovakia, 18–20 April 2018; pp. 1–4. [Google Scholar]
- Tavčar, J.; Černe, B.; Duhovnik, J.; Zorko, D. A Multicriteria Function for Polymer Gear Design Optimization. J. Comput. Des. Eng. 2021, 8, 581–599. [Google Scholar] [CrossRef]
- Figlus, T.; Kozioł, M.; Kuczyński, Ł. The Effect of Selected Operational Factors on the Vibroactivity of Upper Gearbox Housings Made of Composite Materials. Sensors 2019, 19, 4240. [Google Scholar] [CrossRef] [Green Version]
- Singh, P.K.; Siddhartha; Singh, A.K. An Investigation on the Thermal and Wear Behavior of Polymer Based Spur Gears. Tribol. Int. 2018, 118, 264–272. [Google Scholar] [CrossRef]
- Mao, K.; Langlois, P.; Hu, Z.; Alharbi, K.; Xu, X.; Milson, M.; Li, W.; Hooke, C.J.; Chetwynd, D. The Wear and Thermal Mechanical Contact Behaviour of Machine Cut Polymer Gears. Wear 2015, 332, 822–826. [Google Scholar] [CrossRef]
- Hasl, C.; Illenberger, C.; Oster, P.; Tobie, T.; Stahl, K. Potential of Oil-Lubricated Cylindrical Plastic Gears. J. Adv. Mech. Des. Syst. Manuf. 2018, 12, jamdsm0016. [Google Scholar] [CrossRef] [Green Version]
- Hasl, C.; Oster, P.; Tobie, T.; Stahl, K. Bending Strength of Oil-Lubricated Cylindrical Plastic Gears. Ing. 2017, 81, 349–355. [Google Scholar] [CrossRef]
- Bravo, A.; Koffi, D.; Toubal, L.; Erchiqui, F. Life and Damage Mode Modeling Applied to Plastic Gears. Eng. Fail. Anal. 2015, 58, 113–133. [Google Scholar] [CrossRef]
- Trobentar, B.; Kulovec, S.; Hlebanja, G.; Glodež, S. Experimental Failure Analysis of S-Polymer Gears. Eng. Fail. Anal. 2020, 111, 104496. [Google Scholar] [CrossRef]
- Mao, K.; Li, W.; Hooke, C.J.; Walton, D. Friction and Wear Behaviour of Acetal and Nylon Gears. Wear 2009, 267, 639–645. [Google Scholar] [CrossRef]
- Sarita, B.; Senthilvelan, S. Effects of Lubricant on the Surface Durability of an Injection Molded Polyamide 66 Spur Gear Paired with a Steel Gear. Tribol. Int. 2019, 137, 193–211. [Google Scholar] [CrossRef]
- Lu, Z.; Liu, H.; Zhu, C.; Song, H.; Yu, G. Identification of Failure Modes of a PEEK-Steel Gear Pair under Lubrication. Int. J. Fatigue 2019, 125, 342–348. [Google Scholar] [CrossRef]
- Illenberger, C.M.; Tobie, T.; Stahl, K. Flank Load Carrying Capacity of Oil-Lubricated High Performance Plastic Gears. Forsch. Im. Ing. 2019, 83, 545–552. [Google Scholar] [CrossRef]
- Vorgerd, J.; Tenberge, P.; Joop, M. Scuffing of Cylindrical Gears with Pitch Line Velocities up to 100 m/S. Forsch. Im Ing. 2022, 86, 513–520. [Google Scholar] [CrossRef]
- Ding, Y.; Rieger, N.F. Spalling Formation Mechanism for Gears. Wear 2003, 254, 1307–1317. [Google Scholar] [CrossRef]
- Brumercik, F.; Lukac, M.; Caban, J.; Krzysiak, Z.; Glowacz, A. Comparison of Selected Parameters of a Planetary Gearbox with Involute and Convex–Concave Teeth Flank Profiles. Appl. Sci. 2020, 10, 1417. [Google Scholar] [CrossRef] [Green Version]
- Wojnar, G.; Burdzik, R.; Wieczorek, A.N.; Konieczny, Ł. Multidimensional Data Interpretation of Vibration Signals Registered in Different Locations for System Condition Monitoring of a Three-Stage Gear Transmission Operating under Difficult Conditions. Sensors 2021, 21, 7808. [Google Scholar] [CrossRef]
- Hu, J.; Hu, N.; Yang, Y.; Zhang, L.; Shen, G. Nonlinear Dynamic Modeling and Analysis of a Helicopter Planetary Gear Set for Tooth Crack Diagnosis. Measurement 2022, 198, 111347. [Google Scholar] [CrossRef]
- Cao, W.; Han, Z.; Yang, Z.Z.; Wang, N.; Qu, J.X.; Wang, D. Deterioration State Diagnosis and Wear Evolution Evaluation of Planetary Gearbox Using Vibration and Wear Debris Analysis. Measurement 2022, 193, 110978. [Google Scholar] [CrossRef]
- Zhang, K.; Li, H.; Cao, S.; Wang, C.; Sun, B.; Liu, A. Investigation on Planetary Gearbox Fault Mechanism under Variable Speed Conditions Based on Rigid-Flexible Coupling Dynamics Model. Eng. Fail. Anal. 2022, 133, 105994. [Google Scholar] [CrossRef]
- Zorko, D. Investigation on the High-Cycle Tooth Bending Fatigue and Thermo-Mechanical Behavior of Polymer Gears with a Progressive Curved Path of Contact. Int. J. Fatigue 2021, 151, 106394. [Google Scholar] [CrossRef]
- Zorko, D.; Kulovec, S.; Duhovnik, J.; Tavčar, J. Durability and Design Parameters of a Steel/PEEK Gear Pair. Mech. Mach. Theory 2019, 140, 825–846. [Google Scholar] [CrossRef]
- Tavčar, J.; Grkman, G.; Duhovnik, J. Accelerated Lifetime Testing of Reinforced Polymer Gears. J. Adv. Mech. Des. Syst. Manuf. 2018, 12, JAMDSM0006. [Google Scholar] [CrossRef] [Green Version]
- Zorko, D.; Demšar, I.; Tavčar, J. An Investigation on the Potential of Bio-Based Polymers for Use in Polymer Gear Transmissions. Polym. Test. 2021, 93, 106994. [Google Scholar] [CrossRef]
- Černe, B.; Petkovšek, M.; Duhovnik, J.; Tavčar, J. Thermo-Mechanical Modeling of Polymer Spur Gears with Experimental Validation Using High-Speed Infrared Thermography. Mech. Mach. Theory 2020, 146, 103734. [Google Scholar] [CrossRef]
- Cathelin, J. Material Data for Advanced Plastic Gear Simulation. In International Conference on Gears 2019; VDI Verlag GMBH: Düsseldorf, Germany, 2019; Volume 2355, pp. 1379–1390. [Google Scholar]
- Zorko, D.; Duhovnik, J.; Tavčar, J. Tooth Bending Strength of Gears with a Progressive Curved Path of Contact. J. Comput. Des. Eng. 2021, 8, 1037–1058. [Google Scholar] [CrossRef]
- Zorko, D.; Tavčar, J.; Šturm, R.; Bergant, Z. Investigation of the Durability and Performance of Autoclave-Cured, Woven Carbon Fiber-Reinforced Polymer Composite Gears in Mesh with a Steel Pinion. Compos. Struct. 2021, 273, 114250. [Google Scholar] [CrossRef]
- Zorko, D.; Tavčar, J.; Bizjak, M.; Šturm, R.; Bergant, Z. High Cycle Fatigue Behaviour of Autoclave-Cured Woven Carbon Fibre-Reinforced Polymer Composite Gears. Polymer Testing 2021, 102, 107339. [Google Scholar] [CrossRef]
- Černe, B.; Bergant, Z.; Šturm, R.; Tavčar, J.; Zorko, D. Experimental and Numerical Analysis of Laminated Carbon Fibre-Reinforced Polymer Gears with Implicit Model for Coefficient-of-Friction Evaluation. J. Comput. Des. Eng. 2022, 9, 246–262. [Google Scholar] [CrossRef]
- Urbas, U.; Zorko, D.; Vukašinović, N.; Černe, B. Comprehensive Areal Geometric Quality Characterisation of Injection Moulded Thermoplastic Gears. Polymers 2022, 14, 705. [Google Scholar] [CrossRef] [PubMed]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demšar, I.; Černe, B.; Tavčar, J.; Vukašinović, N.; Zorko, D. Agile Development of Polymer Power Transmission Systems for e-Mobility—A Novel Methodology Based on an e-Bike Drive Case Study. Polymers 2023, 15, 68. https://doi.org/10.3390/polym15010068
Demšar I, Černe B, Tavčar J, Vukašinović N, Zorko D. Agile Development of Polymer Power Transmission Systems for e-Mobility—A Novel Methodology Based on an e-Bike Drive Case Study. Polymers. 2023; 15(1):68. https://doi.org/10.3390/polym15010068
Chicago/Turabian StyleDemšar, Ivan, Borut Černe, Jože Tavčar, Nikola Vukašinović, and Damijan Zorko. 2023. "Agile Development of Polymer Power Transmission Systems for e-Mobility—A Novel Methodology Based on an e-Bike Drive Case Study" Polymers 15, no. 1: 68. https://doi.org/10.3390/polym15010068
APA StyleDemšar, I., Černe, B., Tavčar, J., Vukašinović, N., & Zorko, D. (2023). Agile Development of Polymer Power Transmission Systems for e-Mobility—A Novel Methodology Based on an e-Bike Drive Case Study. Polymers, 15(1), 68. https://doi.org/10.3390/polym15010068