Estimating Canopy Parameters Based on the Stem Position in Apple Trees Using a 2D LiDAR





Abstract
:1. Introduction
2. Material and Methods
2.1. Field Experiments
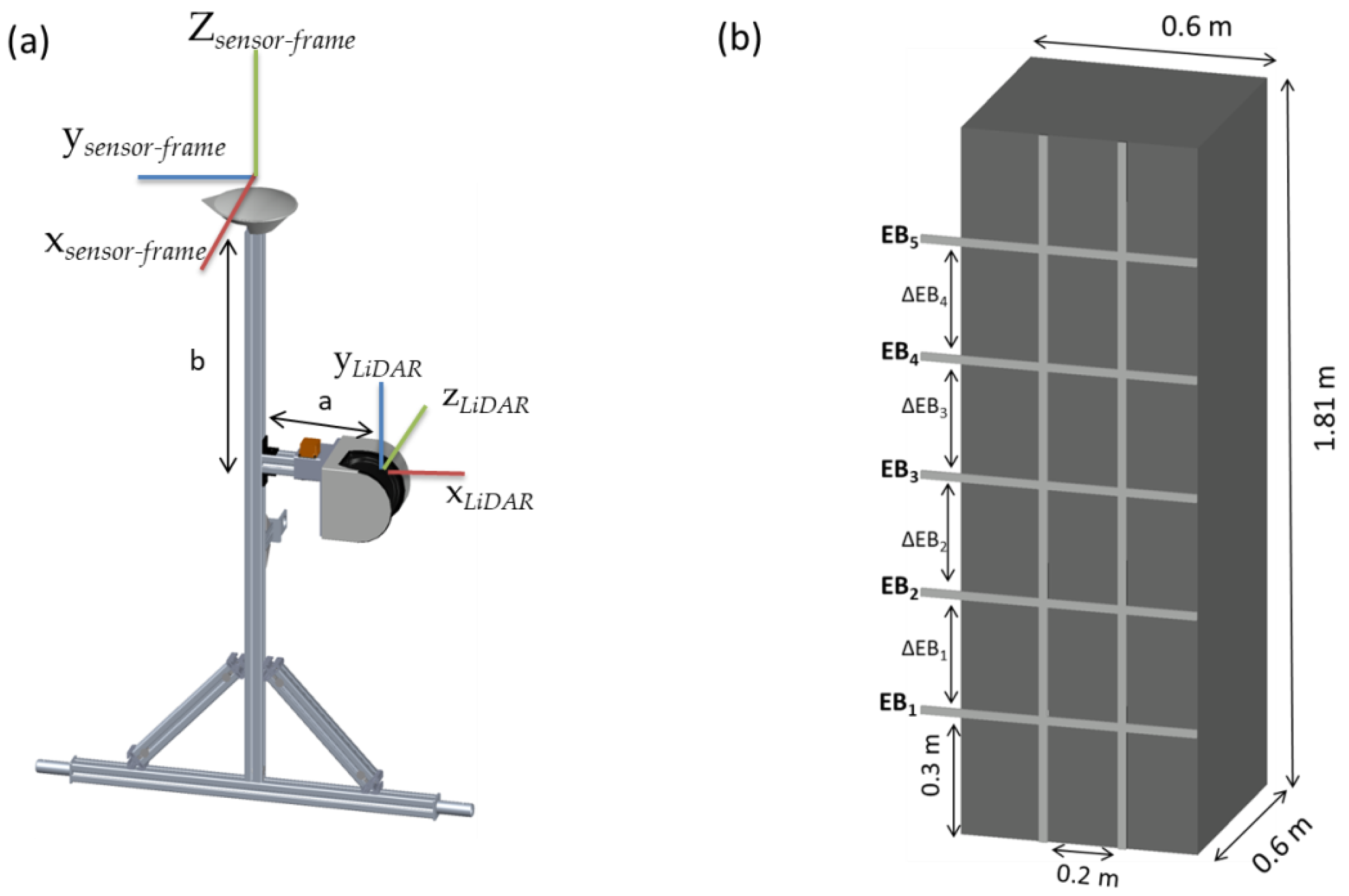
2.2. Instrumentation
2.3. Sensor-Frame Analysis
2.4. Data Pre-Processing
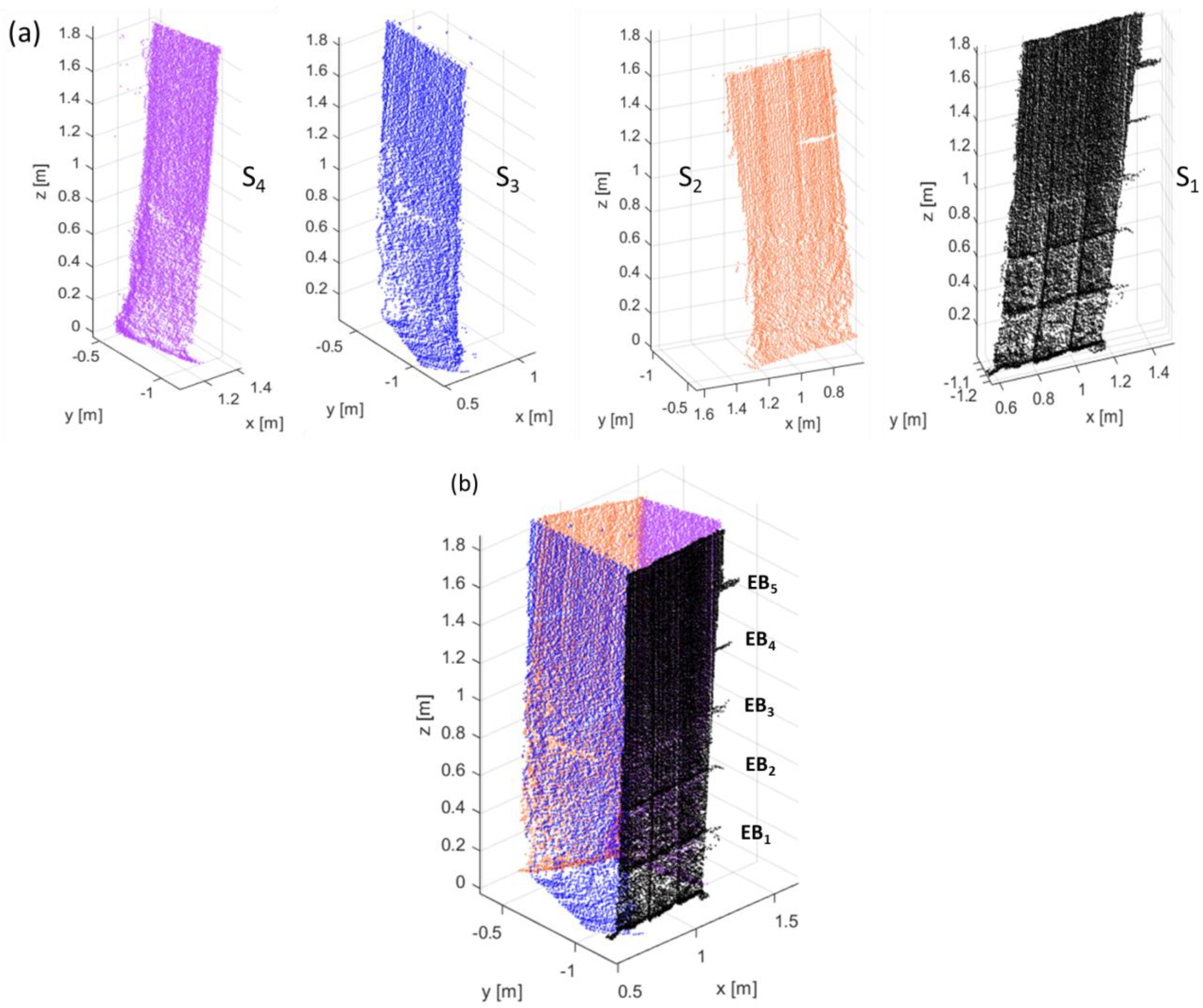
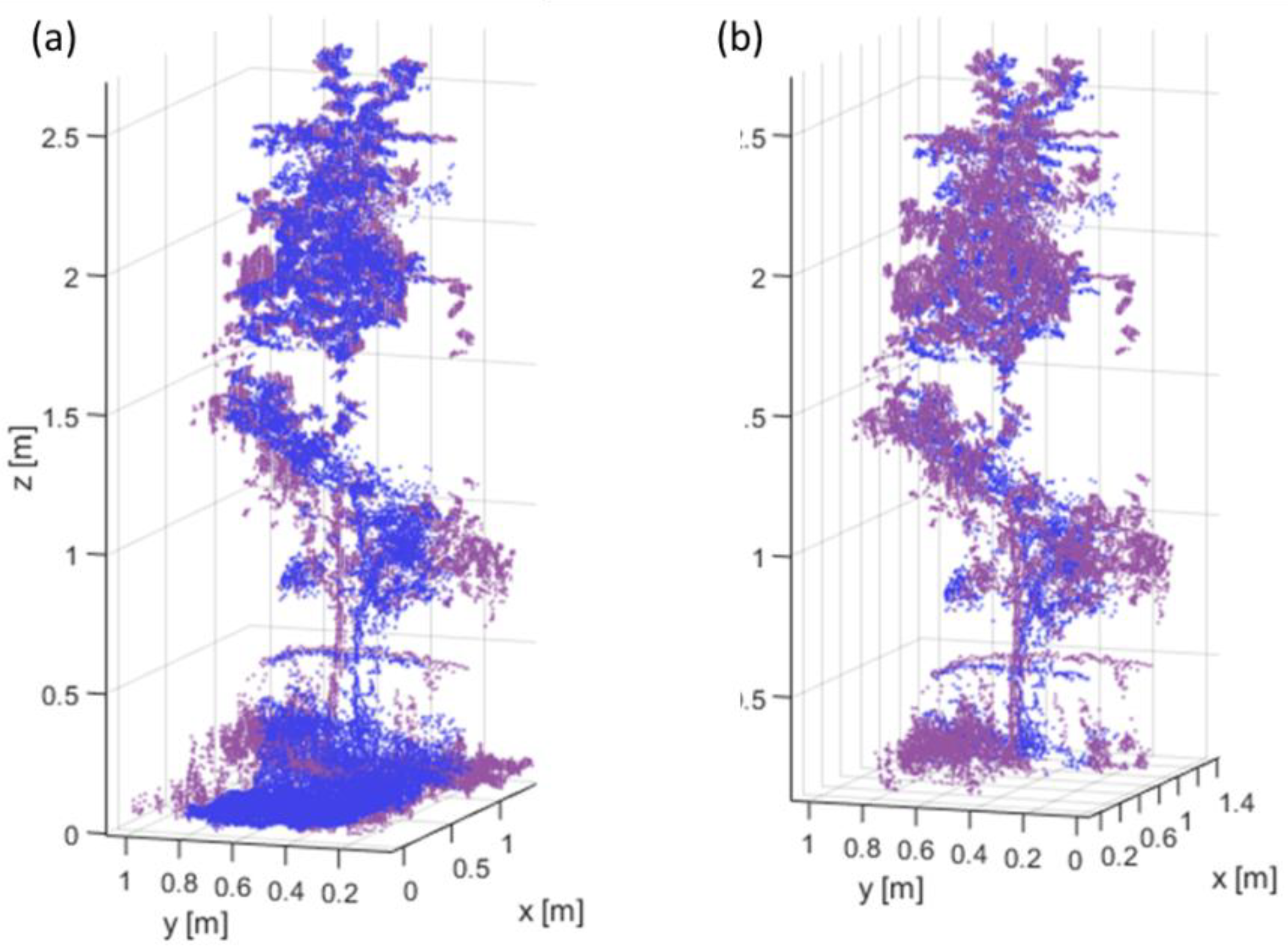
2.5. Point Cloud Rigid Registration and Stitching
2.6. Tree Row Alignment
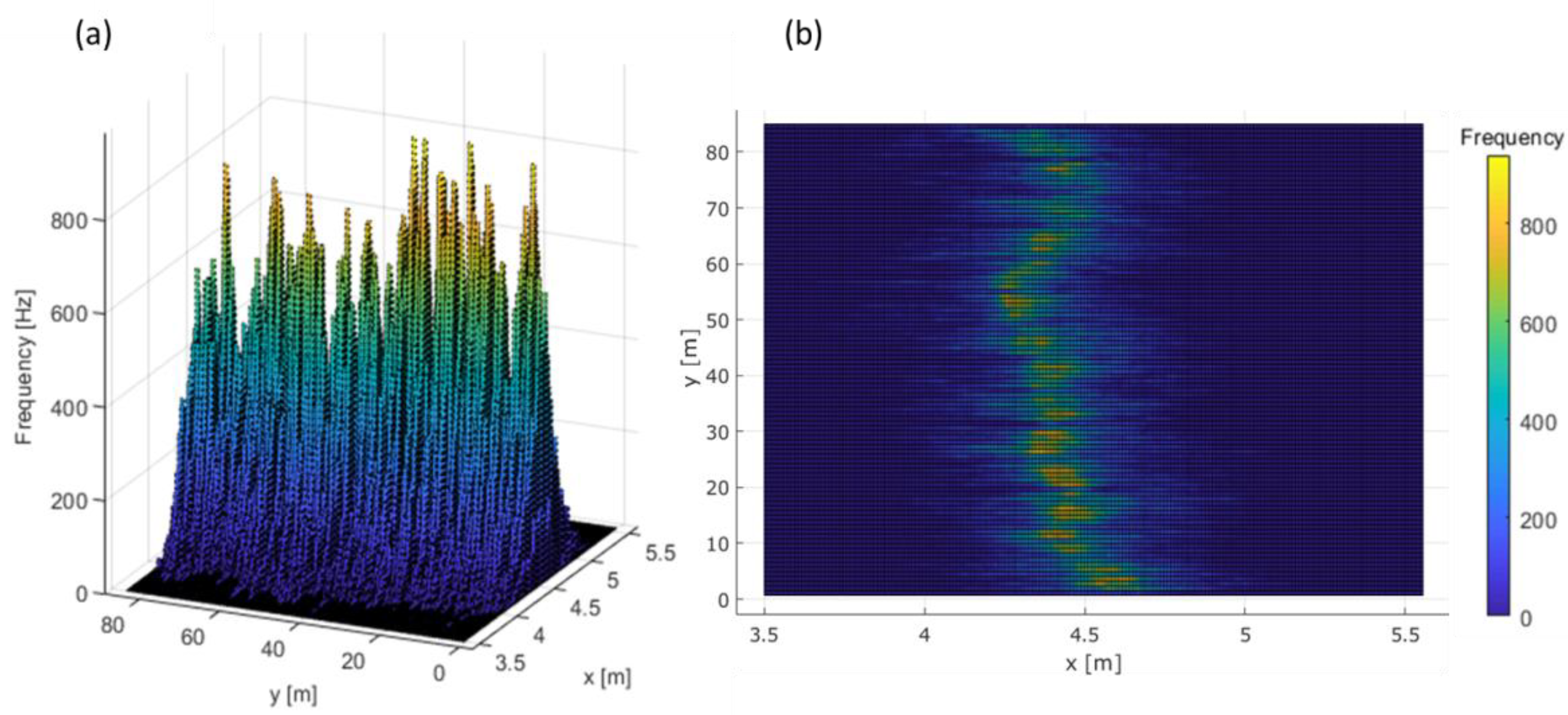
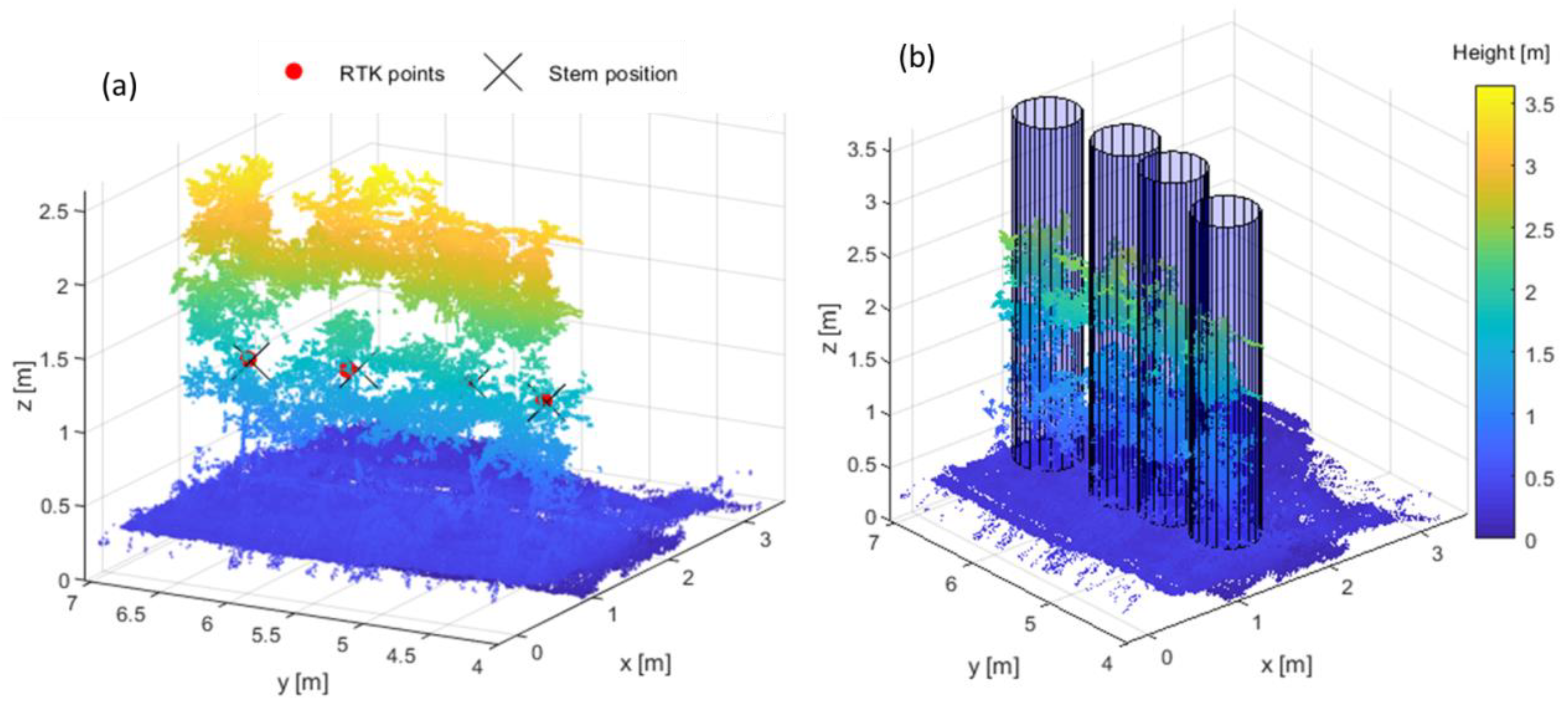
2.7. Tree Stem Estimation
2.8. Tree Height
2.9. Stem Diameter
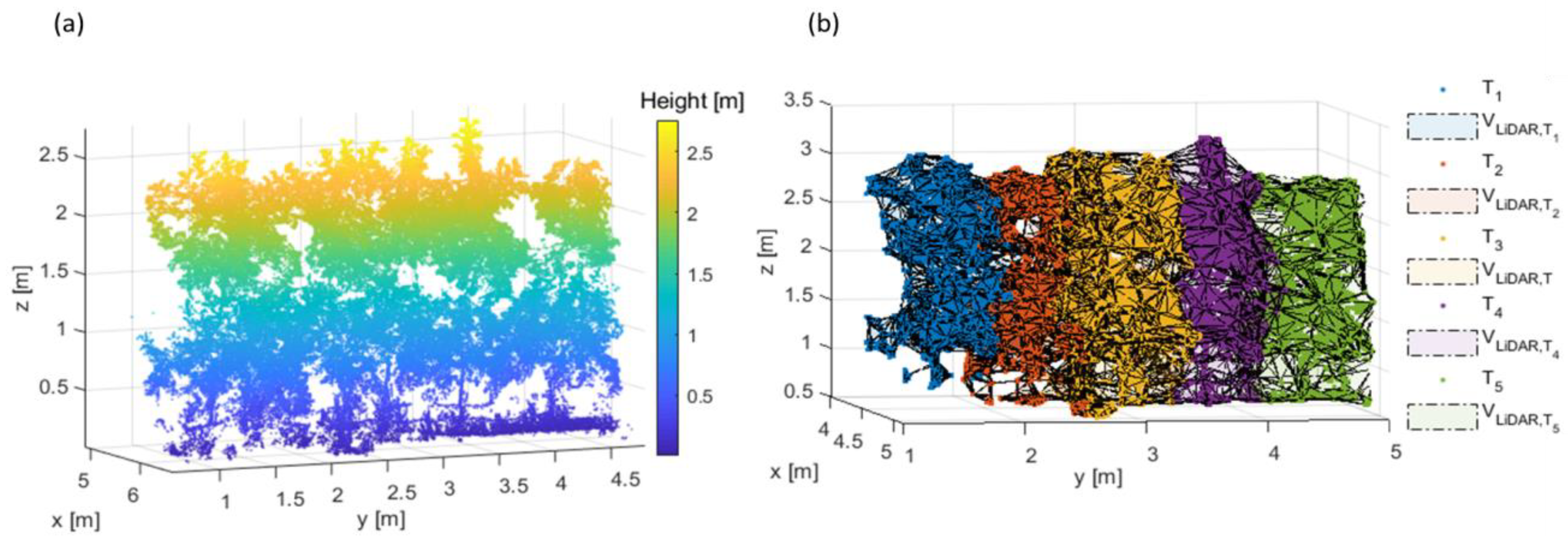
2.10. Canopy Volume
3. Results and Discussion
3.1. Measuring Uncertainty of the System Applied in the Field
3.2. Separation of Trees by Means of the Stem Position
3.3. Estimation of Tree Variables
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lee, K.H.; Ehsani, R. A laser scanner based measurement system for quantification of citrus tree geometric characteristics. Appl. Eng. Agric. 2009, 25, 777–788. [Google Scholar] [CrossRef]
- Chakraborty, M.; Khot, L.R.; Sankaran, S.; Jacoby, P.W. Evaluation of mobile 3D light detection and ranging based canopy mapping system for tree fruit crops. Comput. Electron. Agric. 2019, 158, 284–293. [Google Scholar] [CrossRef]
- Tsoulias, N.; Paraforos, D.S.; Fountas, S.; Zude-Sasse, M. Calculating the Water Deficit Spatially Using LiDAR Laser Scanner in an Apple Orchard. In Proceedings of the European 12th Conference of Precision Agriculture, Montpellier, France, 8–11 July 2019. [Google Scholar]
- Sanz, R.; Rosell, J.R.; Llorens, J.; Gil, E.; Planas, S. Relationship between tree row LIDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LIDAR 3D Dynamic Measurement System. Agric. For. Meteorol. 2013, 171, 153–162. [Google Scholar] [CrossRef]
- Arno, J.; Escola, A.; Valle’s, J.M.; Llorens, J.; Sanz, R.; Masip, J.; Palacín, J.; Rosell-Polo, J.R. Leaf area index estimation in vineyards using a ground-based LiDAR scanner. Precis. Agric. 2013, 14, 290–306. [Google Scholar] [CrossRef]
- Tagarakis, A.C.; Koundouras, S.; Fountas, S.; Gemtos, T. Evaluation of the use of LIDAR laser scanner to map pruning wood in vineyards and its potential for management zones delineation. Precis. Agric. 2018, 19, 334–347. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef]
- Walklate, P.J.; Cross, J.V.; Richardson, G.M.; Murray, R.A.; Baker, D.E. Comparison of different spray volume deposition models using LIDAR measurements of apple orchards. Biosyst. Eng. 2002, 82, 253–267. [Google Scholar] [CrossRef]
- Rosell Polo, J.R.; Sanz, R.; Llorens, J.; Arnó, J.; Escolà, A.; Ribes-Dasi, M.; Masip, J.; Camp, F.; Gràcia, F.; Solanelles, F.; et al. A tractor-mounted scanning LIDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements. Biosyst. Eng. 2009, 102, 128–134. [Google Scholar] [CrossRef]
- Escola, A.; Martínez-Casasnovas, J.A.; Rufat, J.; Arnó, J.; Arbonés, A.; Sebé, F.; Pascual, M.; Sebe, F.; Pascual, M.; Gregorio, E.; et al. Mobile terrestrial laser scanner applications in precision fruticulture/horticulture and tools to extract information from canopy point clouds. Precis. Agric. 2017, 18, 111–132. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Llorens, J.; Gamarra-Diezma, J.; Gil-Ribes, J.; Gil, E. Towards an optimized method of olive tree crown volume measurement. Sensors 2015, 15, 3671–3687. [Google Scholar] [CrossRef] [PubMed]
- Sanz, R.; Llorens, J.; Escolà, A.; Arnó, J.; Planas, S.; Román, C.; Rosell-Polo, J.R. LIDAR and non-LIDAR-based canopy parameters to estimate the leaf area in fruit trees and vineyard. Agric. For. Meteorol. 2018, 260, 229–239. [Google Scholar] [CrossRef]
- Cheein, F.A.A.; Guivant, J.; Sanz, R.; Escolà, A.; Yandún, F.; Torres-Torriti, M.; Rosell-Polo, J.R. Real-time approaches for characterization of fully and partially scanned canopies in groves. Comput. Electron. Agric. 2018, 118, 361–371. [Google Scholar] [CrossRef]
- Colaço, A.F.; Trevisan, R.G.; Molin, J.P.; Rosell-Polo, J.R. Orange tree canopy volume estimation by manual and LiDAR-based methods. Adv. Anim. Biosci. 2017, 8, 477–480. [Google Scholar] [CrossRef]
- Palleja, T.; Tresanchez, M.; Teixido, M.; Sanz, R.; Rosell, J.R.; Palacin, J. Sensitivity of tree volume measurement to trajectory errors from a terrestrial LIDAR scanner. Agric. For. Meteorol. 2010, 150, 1420–1427. [Google Scholar] [CrossRef]
- Jimenez-Berni, J.A.; Deery, D.M.; Rozas-Larraondo, P.; Condon, A.T.G.; Rebetzke, G.J.; James, R.A.; Bovill, W.D.; Sirault, X.R. High throughput determination of plant height, ground cover, and above-ground biomass in wheat with LiDAR. Front. Plant Sci. 2018, 9, 237. [Google Scholar] [CrossRef] [PubMed]
- Escolà, A.; Rosell-Polo, J.R.; Planas, S.; Gil, E.; Pomar, J.; Camp, F.; Solanelles, F. Variable rate sprayer. Part 1—Orchard prototype: Design, implementation and validation. Comput. Electron. Agric. 2013, 95, 122–135. [Google Scholar] [CrossRef]
- Siebers, M.; Edwards, E.; Jimenez-Berni, J.; Thomas, M.; Salim, M.; Walker, R. Fast phenomics in vineyards: Development of GRover, the grapevine rover, and LiDAR for assessing grapevine traits in the field. Sensors 2018, 18, 2924. [Google Scholar] [CrossRef] [PubMed]
- Underwood, J.P.; Jagbrant, G.; Nieto, J.I.; Sukkarieh, S. Lidar-based tree recognition and platform localization in orchards. J. Field Rob. 2015, 32, 1056–1074. [Google Scholar] [CrossRef]
- Reiser, D.; Vázquez-Arellano, M.; Paraforos, D.S.; Garrido-Izard, M.; Griepentrog, H.W. Iterative individual plant clustering in maize with assembled 2D LiDAR data. Comput. Indust. 2018, 99, 42–52. [Google Scholar] [CrossRef]
- Garrido, M.; Perez-Ruiz, M.; Valero, C.; Gliever, C.J.; Hanson, B.D.; Slaughter, D.C. Active optical sensors for tree stem detection and classification in nurseries. Sensors 2014, 14, 10783–10803. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Grift, T.E. A LIDAR-based crop height measurement system for Miscanthus giganteus. Comput. Electron. Agric. 2012, 85, 70–76. [Google Scholar] [CrossRef]
- Sun, S.; Li, C.; Paterson, A. In-field high-throughput phenotyping of cotton plant height using LiDAR. Remote Sens. 2017, 9, 377. [Google Scholar] [CrossRef]
- Vázquez-Arellano, M.; Paraforos, D.S.; Reiser, D.; Garrido-Izard, M.; Griepentrog, H.W. Determination of stem position and height of reconstructed maize plants using a time-of-flight camera. Comput. Electron. Agric. 2018, 154, 276–288. [Google Scholar] [CrossRef]
- SICK AG. Operation Instructions LMS5XX Laser Measurement Sensors. Available online: https://www.sick.com/media/docs/4/14/514/Operating_instructions_Laser_Measurement_Sensors_of_the_LMS5xx_Product_Family_en_IM0037514.pdf (accessed on 21 June 2019).
- Kooi, B. MTi User Manual, MTi 10-Series and MTi 100-Series. 2014. Available online: http://www.farnell.com/datasheets/1935846.pdf (accessed on 21 June 2019).
- Farrell, J.; Barth, M. The Global Positioning System & Inertial Navigation; McGraw-Hill: New York, NY, USA, 1999. [Google Scholar]
- Bentley, J.L. Multidimensional binary search trees used for associative searching. Commun. ACM 1975, 18, 509–517. [Google Scholar] [CrossRef]
- Garrido, M.; Paraforos, D.S.; Reiser, D.; Arellano, M.V.; Griepentrog, H.W.; Valero, C. 3D maize plant reconstruction based on georeferenced overlapping lidar point clouds. Remote Sens. 2015, 7, 17077–17096. [Google Scholar] [CrossRef]
- Vázquez-Arellano, M.; Reiser, D.; Paraforos, D.S.; Garrido-Izard, M.; Burce, M.E.C.; Griepentrog, H.W. 3-D reconstruction of maize plants using a time-of-flight camera. Comput. Electron. Agric. 2018, 145, 235–247. [Google Scholar] [CrossRef]
- Barber, C.B.; Dobkin, D.P.; Huhdanpaa, H.T. The Quickhull Algorithm for Convex Hulls. ACM Trans. Math. Softw. 1996, 22, 469–483. [Google Scholar] [CrossRef]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogram. Remote Sens. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Forsman, M.; Börlin, N.; Olofsson, K.; Reese, H.; Holmgren, J. Bias of cylinder diameter estimation from ground-based laser scanners with different beam widths: A simulation study. ISPRS J. Photogram. Remote Sens. 2018, 135, 84–92. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Jaakkola, A.; Kaasalainen, M.; Krooks, A.; Kukko, A. Analysis of incidence angle and distance effects on terrestrial laser scanner intensity: Search for correction methods. Remote Sens. 2011, 3, 2207–2221. [Google Scholar] [CrossRef]
- Lu, H.; Tang, L.; Whitham, S.A.; Mei, Y. A robotic platform for corn seedling morphological traits characterization. Sensors 2017, 17, 2082. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Estornell, J.; Velázquez-Martí, A.; Fernández-Sarría, A.; López-Cortés, I.; Martí-Gavilá, J.; Salazar, D. Estimation of structural attributes of walnut trees based on terrestrial laser scanning. RAET 2017, 48, 67–76. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S.C.; Horne, D.W.; Pugh, N.A.; Rooney, W.L. Automated detection and measurement of individual sorghum panicles using density-based clustering of terrestrial lidar data. ISPRS J Photogramm. Remote Sen. 2019, 149, 1–13. [Google Scholar] [CrossRef]
- Dassot, M.; Colin, A.; Santenoise, P.; Fournier, M.; Constant, T. Terrestrial laser scanning for measuring the solid wood volume, including branches, of adult standing trees in the forest environment. Comput. Electron. Agric. 2012, 89, 86–93. [Google Scholar] [CrossRef]
- Calders, K.; Newnham, G.; Burt, A.; Murphy, S.; Raumonen, P.; Herold, M.; Culvenor, D.; Avitabile, V.; Disney, M.; Armston, J.; et al. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods Ecol. Evol. 2015, 6, 198–208. [Google Scholar] [CrossRef]
- Srinivasan, S.; Popescu, S.; Eriksson, M.; Sheridan, R.; Ku, N.W. Terrestrial laser scanning as an effective tool to retrieve tree level height, crown width, and stem diameter. Remote Sens. 2015, 7, 1877–1896. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Functional Data | General Data |
|---|---|
| Operating range: up to 10 m | Light detection and ranging (LiDAR) Class: 1 (IEC 60825-1) |
| Scanning angle: 190° | Enclosure rating: IP 67 |
| Scanning frequency: 25 Hz | Temperature range: −40 °C to 60 °C |
| Systematic error: ± 25 mm | Light source: 905 nm (near infrared) |
| Statistical error: ± 6 mm | Total weight: 3.7 kg |
| Angular resolution: 0.1667° | Laser beam diameter at the front screen: 13.6 mm |
| Mean (m) | Max (m) | Min (m) | SD (mm) | MAE (mm) | MBE (mm) | RMSE (%) | ||
|---|---|---|---|---|---|---|---|---|
| Height | S1 | 1.83 | 1.83 | 1.81 | 13.98 | 8.18 | 2.75 | 1.63 |
| S2 | 1.80 | 1.81 | 1.79 | 13.34 | 3.00 | 1.75 | 0.60 | |
| S3 | 1.80 | 1.82 | 1.79 | 1.78 | 3.31 | 0.68 | 0.66 | |
| S4 | 1.79 | 1.81 | 1.79 | 5.37 | 1.06 | −0.81 | 0.21 | |
| Width | S1 | 0.60 | 0.60 | 0.58 | 2.10 | 4.51 | 2.33 | 0.90 |
| S2 | 0.59 | 0.60 | 0.58 | 7.10 | 1.50 | −1.5 | 0.30 | |
| S3 | 0.58 | 0.59 | 0.58 | 7.96 | 2.06 | −4.06 | 0.81 | |
| S4 | 0.59 | 0.61 | 0.59 | 8.5 | 2.18 | −2.22 | 0.43 |
| Mean (mm) | Max (mm) | Min (mm) | SD (mm) | MAE (mm) | MBE (mm) | RMSE (%) | ||
|---|---|---|---|---|---|---|---|---|
| Height | EB1 | 21 | 30 | 11 | 7.9 | 2.1 | −2.1 | 4.2 |
| EB2 | 10 | 30 | 10 | 8.5 | 2.8 | −2.8 | 5.6 | |
| EB3 | 27 | 29 | 20 | 4.8 | 0.8 | −0.8 | 1.5 | |
| EB4 | 28 | 30 | 20 | 4.8 | 0.6 | −1.5 | 3.2 | |
| EB5 | 29 | 30 | 28 | 0.9 | 0.2 | −0.2 | 3.0 | |
| Width | EB1 | 89 | 100 | 81 | 8.5 | 2.8 | 2.8 | 5.5 |
| EB2 | 81 | 85 | 79 | 2.6 | 0.4 | −2.8 | 5.3 | |
| EB3 | 104 | 120 | 85 | 4.8 | 0.8 | −0.8 | 1.5 | |
| EB4 | 102 | 103 | 100 | 1.9 | 1.5 | 0.4 | 0.8 | |
| EB5 | 102 | 104 | 100 | 1.9 | 1.6 | 0.4 | 0.7 |
| Min | Max | Mean | MAE | MBE | RMSE (%) | R2 | |
|---|---|---|---|---|---|---|---|
| Hmanual (mm) | 1900 | 2800 | 2310 | 5.55 | 0.62 | 5.71 | 0.87 |
| HLiDAR (mm) | 1870 | 2820 | 2350 | ||||
| Smanual (mm) | 55 | 132.5 | 97.1 | 2.52 | −3.75 | 2.23 | 0.88 |
| SLiDAR (mm) | 63 | 136 | 99.5 | ||||
| Vmanual (m3) | 0.23 | 1.12 | 0.55 | 5.23 | 5.93 | 4.64 | 0.77 |
| VLiDAR (m3) | 0.38 | 1.05 | 0.58 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsoulias, N.; Paraforos, D.S.; Fountas, S.; Zude-Sasse, M. Estimating Canopy Parameters Based on the Stem Position in Apple Trees Using a 2D LiDAR. Agronomy 2019, 9, 740. https://doi.org/10.3390/agronomy9110740
Tsoulias N, Paraforos DS, Fountas S, Zude-Sasse M. Estimating Canopy Parameters Based on the Stem Position in Apple Trees Using a 2D LiDAR. Agronomy. 2019; 9(11):740. https://doi.org/10.3390/agronomy9110740
Chicago/Turabian StyleTsoulias, Nikos, Dimitrios S. Paraforos, Spyros Fountas, and Manuela Zude-Sasse. 2019. "Estimating Canopy Parameters Based on the Stem Position in Apple Trees Using a 2D LiDAR" Agronomy 9, no. 11: 740. https://doi.org/10.3390/agronomy9110740
APA StyleTsoulias, N., Paraforos, D. S., Fountas, S., & Zude-Sasse, M. (2019). Estimating Canopy Parameters Based on the Stem Position in Apple Trees Using a 2D LiDAR. Agronomy, 9(11), 740. https://doi.org/10.3390/agronomy9110740