


Drone-Assisted Particulate Matter Measurement in Air Monitoring: A Patent Review

 , ,
, ,  , and
, and
Abstract
:1. Introduction
1.1. Drones
Rotary-Wing Drones
2. Methodology
2.1. Patent Review Articles Search Methodology
2.2. Data Sources and Search Strategy
2.3. Inclusion and Exclusion Criteria
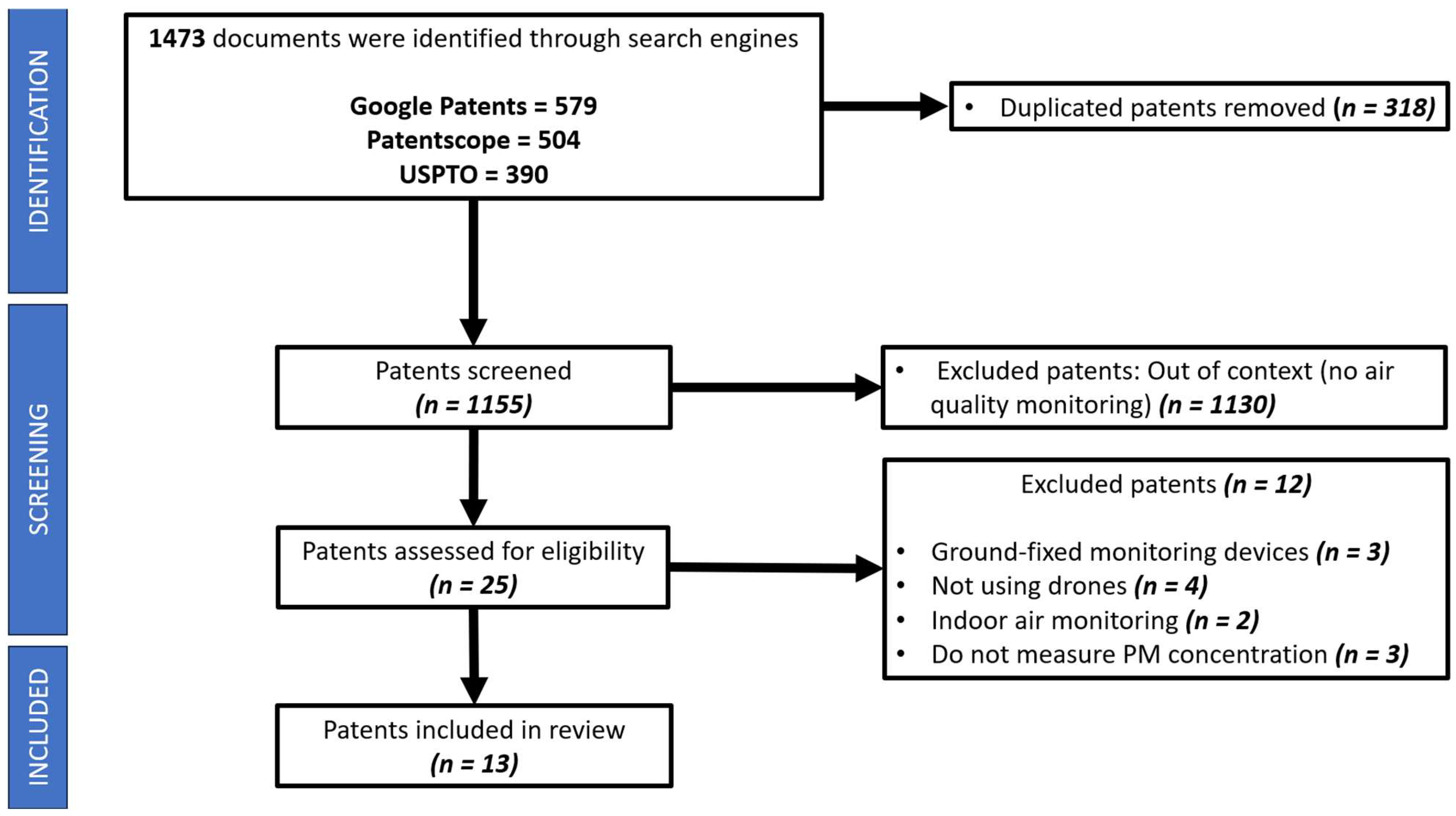
2.4. Study Selection
2.5. Data Extraction
3. Results
3.1. Patents Analysis
3.2. Patents Summary
3.2.1. Air Pollution Monitoring
- Patent IN202241014209, India, 2022. This invention uses a drone to detect the concentration of CO, CO2, NO2, SO2, PM, and Volatile Organic Compounds (VOC) in the air at a specific altitude and geographical coordinates in a specific period using an infrared light-scattering sensor. Information is stored in a cloud server, which is periodically updated and transmits information to a device with a Graphical User Interface (GUI) to display it to users [57].
- Patent US10175151B2, USA, 2019. This invention consists of a rotary-wing drone, whose number of rotors vary according to the lifting needs, including an air monitoring system, a GPS module, and a wireless transmitter such as IEEE 802.11. An air quality sensor detects the concentration of pollutants. If the concentration of impurities in air is higher than a defined threshold, an air sample is taken using a gas sampling bag or a vacuum canister. Air quality information is wirelessly transmitted to a ground station [58].
- Patent CN217918426U, China, 2022. This invention provides a drone equipped with PM2.5 and PM10 sensors which are not specified, since it can be any commercial sensor to be selected according to the needs of the user. The aim of this invention is to solve the presented problem when the sight of the camera included in a drone is obstructed by water drops. The drone includes a high-definition camera covered by a glass chamber, to prevent water drops from vapor liquefaction from being produced on the camera lens surface. When a water drop is produced on the glass cover and obstructs the camera lens, a rod is spun by a motor to remove the water drop without damaging the high-definition camera’s lens. The improvement of this invention is not focused on air quality monitoring, although the device’s purpose is to monitor outdoor air quality [59].
- Patent CN109059870A, China, 2020. This consists of a system to detect, through an infrared camera and a geographic location module, the source of air pollutant discharge, identifying the illegal operation of coal-burning boilers. If the temperature threshold detected by the infrared camera is reached, the concentration of PM10 and PM2.5 is measured. Data are stored by transmission to a ground station through a non-specified protocol [60].
- Patent PL234716B1, Poland, 2020. This presents a remotely controlled quadcopter with a differential measurement air monitor device. This invention aims at solving the problem presented when a chimney contains more than one smoke opening. The device comprises two air inlets, each with a sensor for measuring concentration of PM10, PM2.5, CO2, O3, SO2, and HCl in the intake air. A differential measurement circuit receives the signal of every sensor. A display that contains the pollutant concentration measured by every sensor and the difference measured by the differential measurement circuit is combined with measurement systems. The air inlets are mounted in the bottom face of the drone and are able to rotate around a vertical axis from 0 to 90 degrees in opposite directions to each other. A camera is located between the inlets, allowing the operator to know the position of the inlets [61].
3.2.2. Air Pollution Control
- Patent DE202022103602U1, Germany, 2022. This invention uses a set of quadcopters that are capable of identifying a region with a higher PM2.5 concentration with respect to other regions. After every drone detects the PM2.5 concentration where they are located, quadcopters group at the region where the drone that detected the highest PM2.5 concentration is located to purify air in the polluted identified region [62].
3.2.3. Assessing the Air Quality and Pollutant Ratio
- Patent KR102035693B1, South Korea, 2019. This presents an invention that generates three-dimensional spatial information using a drone integrated with an infrared camera, a laser scanner, a GPS device, and a pollutant concentration sensor group that transmits the measured concentration of PM10, O3, SO2, CO, NO2, and Pb through a communication device into a data-receiving unit using serial transmission. The received data generate numerical values for the air pollution index and its distribution in a three-dimensional map using geographical location information. The data are stored in a database [63].
- Patent JP2022059848A, Japan, 2022. This uses a set of bicopters that consist of slave drones that communicate with a master drone to measure air quality by detecting the concentration of PM2.5 with a high time resolution in a three-dimensional region. Information is sent to a base station that can be either fixed to the ground or mounted in a vehicle. The drones also include meteorological parameter sensors such as wind sensors and humidity sensors to be able to predict the source of the detected PM2.5 by knowing its trajectory. Slave drones communicate with the master drone by Wi-Fi, and the master drone communicates with the base station by mobile data to allow a larger communication range [64].
- Patent CN110068655A, China, 2022. This invention aims to solve the presented problem when it is required to measure air quality at high altitudes in the atmosphere and acquire ground images to create a map. Taking a picture at a very long distance from the ground affects image resolution while taking a picture close to the ground does not allow for measuring air quality at high altitudes in the atmosphere. This invention creates a high-resolution geospatial map that includes the concentration parameter of PM10, PM2.5, CO, NO, SO2, NO2, and O3. A drone that is capable of reaching very high heights is equipped with a GPS module, a data acquisition module, a data memory module, and a data pre-processing unit. The device measures air quality high in the air and moves close to the ground in a desired region to take a high-resolution picture of the ground after. A geospatial map is created using dedicated software after taking several pictures of the ground in a desired region. A stereograph is produced when superposing stereoscopic images are taken by the plane’s camera, creating a three-dimensional map [65].
- Patent CN112305163A, China, 2023. This invention combines wind parameter information with an air monitoring system to identify acquired data inaccuracy. The invention uses a fixed-wing drone to measure the concentrations of PM2.5, PM10, O3, NOx, CO, and SO2 in the atmospheric environment. At the same time, it stores location data using a GPS module and wind parameter data such as wind speed and wind direction using a wind parameter module. The data of an air sample are collected in the first step within 1 s of time resolution. In the second step, the data packets are sent to the control and operation module through a 4G signal. In the third step, the sent data in the second step are obtained by the control and operation module. In the fourth step, the data packets are processed using MATLAB software (version number not specified) to create matrices containing the concentration of every measured pollutant, wind speed, wind direction and location coordinates. In the fifth step, the data are post-processed to determine regions of high pollutant concentration for each individual pollutant and the coordinates of the centroid of every high pollutant concentration region are afterwards corrected using the height parameter [66].
- Patent CN107422747B, China, 2023. This comprises an environment monitoring and sampling device that consists of an information processing unit, a flight control unit, a positioning unit, a data transmission unit (based on signal modulation principles of GSM and Wi-Fi, and the like), an obstacle detection unit, an image acquisition unit, a sampling unit (a jar with a choke valve and a solenoid valve, wherein the solenoid valve controls the opening and closing of the jar, and the choke valve controls the flow speed of the atmospheric sample into the tank), and an atmospheric environment sensor group (PM2.5, PM10, O3, and black carbon concentration, concentration, humidity, and temperature sensors). The invention aims to improve previous inventions in the field of environmental monitoring using drones by including an obstacle detection unit. The obstacle detection module comprises six ultrasonic ranging sensors and depth image cameras located at the front, back, left, right, upper, and lower parts of the drone, automatically monitoring obstacles near the drone in real time. The air pollutant concentration measurements are used to create a three-dimensional map to trace the source of the detected pollutants [67].
- Patent CN113804829A, China, 2020. This invention consists of a real-time monitoring system of atmospheric pollution at different heights that measures the concentration of PM10, PM2.5, PM1, O3, NO2, and SO2. PM2.5 concentration is measured using a laser light-scattering sensor which is specified to be a TSI SidePakAM520 type sensor and is calibrated regularly according to its requirements. The invention comprises five steps. The first of them acquires air quality information, pollution source information, meteorological conditions, and local regional topographic characteristics to provide a complete technical scheme for integrally monitoring atmospheric pollution. In the second step, statistical analysis is performed on historical data to perform a pollutant diffusion simulation based on an air quality diffusion model in combination with terrain, landform, vegetation, and other information, judging a main pollution transmission channel in the area. In the third step, an observation point distribution scheme in the research area is determined by performing a comparison of the air quality measured parameter and the simulated values. In the fourth step, a real-time monitoring network is constructed where the centroid of each researched pollutant emission area is determined through vehicle-mounted navigation. In the fifth and final step, satellite information, meteorological information, pollution source information and simulation methods, and distribution characteristics in the area are integrated to judge the mutual transmission relationship among cities, determine the PM flux, perform pollution characteristics analysis, and provide early warning [68].
- Patent CN110889199A, China, 2022. This invention aims to improve previous inventions that create a gridded plane with PM concentration data among a researched region. The improvement is made by detecting PM2.5 and PM10 concentration, as well as TSP (Total Suspended Particles) data in a three-dimensional space, which requires measuring air quality at different heights from the ground. This is conducted using a drone that carries a PM concentration detector, which allows the building of many gridded planes with PM concentration information. Afterwards, the highest values of PM concentration on every grid are joined to build a plane that contains the highest PM concentration on every grid. Additionally, a gridded plane is created using the average PM concentrations in the vertical space for every grid [69].
4. Discussion
4.1. PM Spatial Distribution Analysis
4.2. Integration of Camera
4.3. Air Purification
4.4. Inclusion of GPS Tracking Unit
4.5. Additional Technological Aspects
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Pollutants and Substance’s Nomenclature
| HCl | Hydrogen chloride |
| HCN | Hydrogen cyanide |
| H2S | Hydrogen sulfide |
| Pb | Lead |
| H2 | Molecular hydrogen |
| Cl2 | Molecular chlorine |
| PM | Particulate matter |
| O2 | Molecular oxygen |
| O3 | Ozone |
| VOC | Volatile organic compound |
| CH4 | Methane |
| CH2O | Formaldehyde |
| SO2 | Sulfur dioxide |
| CO | Carbon monoxide |
| CO2 | Carbon dioxide |
| NO2 | Nitrogen dioxide |
| NO | Nitrogen monoxide |
| NH3 | Ammonia |
| PH3 | Phosphine |
References
- Rohi, G.; Ejofodomi, O.; Ofualagba, G. Autonomous monitoring, analysis, and countering of air pollution using environmental drones. Heliyon 2020, 6, e03252. [Google Scholar] [CrossRef] [PubMed]
- Anderson, J.O.; Thundiyil, J.G.; Stolbach, A. Clearing the Air: A Review of the Effects of Particulate Matter Air Pollution on Human Health. J. Med. Toxicol. 2012, 8, 166–175. [Google Scholar] [CrossRef] [PubMed]
- Cohen, A.J. Estimates and 25-year trends of the global burden of disease attributable to ambient air pollution: An analysis of data from the Global Burden of Diseases Study 2015. Lancet 2017, 389, 1907–1918. [Google Scholar] [CrossRef] [PubMed]
- Paho. Who Weekly Press Briefing on COVID-19—Media Briefing October 27 2021. 2021. Available online: https://www.paho.org/en/documents/weekly-press-briefing-covid-19-directors-opening-remarks-october-27-2021 (accessed on 19 February 2024).
- Environmental Health. Available online: https://www.who.int/health-topics/environmental-health#tab=tab_2 (accessed on 18 January 2024).
- Cortez-Huerta, M. Influence of particulate matter on air quality due to ‘Nortes’ events in the Gulf of Mexico. Atmos. Pollut. Res. 2023, 14, 101889. [Google Scholar] [CrossRef]
- Altieri, K.E.; Keen, S.L. Public health benefits of reducing exposure to ambient fine particulate matter in South Africa. Sci. Total Environ. 2019, 684, 610–620. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Hu, Z.; Cao, J.; Xu, X. The impact of environmental accountability on air pollution: A public attention perspective. Energy Policy 2022, 161, 112733. [Google Scholar] [CrossRef]
- Jia, B.; Gao, M.; Zhang, X.; Xiao, X.; Zhang, S.; Lam, K.K. Rapid increase in mortality attributable to PM2.5 exposure in India over 1998–2015. Chemosphere 2021, 269, 128715. [Google Scholar] [CrossRef]
- Shi, Y. PM2.5-related premature deaths and potential health benefits of controlled air quality in 34 provincial cities of China during 2001–2017. Environ. Impact Assess. Rev. 2022, 97, 106883. [Google Scholar] [CrossRef]
- Somboonsin, P.; Vardoulakis, S.; Canudas-Romo, V. A comparative study of life-years lost attributable to air particulate matter in Asia-Pacific and European countries. Chemosphere 2023, 338, 139420. [Google Scholar] [CrossRef]
- Silva, R.A.; Adelman, Z.; Fry, M.M.; West, J.J. The impact of individual anthropogenic emissions sectors on the global burden of human mortality due to ambient air pollution. Environ. Health Perspect. 2016, 124, 1776–1784. [Google Scholar] [CrossRef]
- Ambient (Outdoor) Air Pollution. Available online: https://www.who.int/news-room/fact-sheets/detail/ambient-(outdoor)-air-quality-and-health (accessed on 18 January 2024).
- Oh, S.M.; Kim, H.R.; Park, Y.J.; Lee, S.Y.; Chung, K.H. Organic Extracts of Urban Air Pollution Particulate Matter (PM2.5)-Induced Genotoxicity and Oxidative Stress in Human Lung Bronchial Epithelial Cells (BEAS-2B Cells). Mutat. Res. Genet. Toxicol. Environ. Mutagen. 2011, 723, 142–151. [Google Scholar] [CrossRef] [PubMed]
- Yang, M. Sources, chemical components, and toxicological responses of size segregated urban air PM samples in high air pollution season in Guangzhou, China. Sci. Total Environ. 2023, 865, 161092. [Google Scholar] [CrossRef] [PubMed]
- Rivera-García, M.O.; Reyna, M.A.; Camarillo-Ramos, M.A.; Reyna-Vargas, M.A.; Avitia, R.L.; Cuevas-González, D.; Osornio, A.R. Cyclone Separator for Air Particulate Matter Personal Monitoring: A Patent Review. Atmosphere 2023, 14, 624. [Google Scholar] [CrossRef]
- US EPA. Air Quality Monitoring and Sensor Technologies. Available online: https://www.epa.gov/air-research/air-quality-monitoring-and-sensor-technologies (accessed on 18 January 2024).
- Budde, M.; Zhang, L.; Beigl, M. Distributed, Low-cost Particulate Matter Sensing: Scenarios, Challenges, Approaches. In Proceedings of the 1st International Conference on Atmospheric Dust—DUST2014, Castellaneta, Marina, Italy, 1–6 June 2014. [Google Scholar] [CrossRef]
- US EPA. Managing Air Quality—Ambient Air Monitoring. Available online: https://www.epa.gov/air-quality-management-process/managing-air-quality-ambient-air-monitoring (accessed on 18 January 2024).
- Kang, Y.; Aye, L.; Ngo, T.D.; Zhou, J. Performance evaluation of low-cost air quality sensors: A review. Sci. Total Environ. 2022, 818, 151769. [Google Scholar] [CrossRef] [PubMed]
- Mead, M.I. The use of electrochemical sensors for monitoring urban air quality in low-cost, high-density networks. Atmos. Environ. 2013, 70, 186–203. [Google Scholar] [CrossRef]
- Jumaah, H.J.; Kalantar, B.; Mansor, S.; Halin, A.A.; Ueda, N.; Jumaah, S.J. Development of UAV-based PM2.5 monitoring system. Drones 2021, 5, 60. [Google Scholar] [CrossRef]
- Tian, J. Integration of Satellite Remote Sensing and Ground-Based Measurements for Modelling the Spatiotemporal Distribution of Fine Particulate Matter at a Regional Scale. Ph.D. Thesis, Queen’s University, Kingston, ON, Canada, December 2008. [Google Scholar]
- Lambey, V.; Prasad, A.D. A Review on Air Quality Measurement Using an Unmanned Aerial Vehicle. Water Air. Soil Pollut. 2021, 232, 109. [Google Scholar] [CrossRef]
- Jońca, J.; Pawnuk, M.; Bezyk, Y.; Arsen, A.; Sówka, I. Drone-Assisted Monitoring of Atmospheric Pollution—A Comprehensive Review. Sustainability 2022, 14, 11516. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Gupta, S.G.; Ghonge, M.M.; Jawandhiya, P.M. Review of Unmanned Aircraft System (UAS). Int. J. Adv. Res. Comput. Eng. Technol. (IJARCET) 2013, 2, 2278–13233. [Google Scholar] [CrossRef]
- Berman, E.S.F.; Fladeland, M.; Liem, J.; Kolyer, R.; Gupta, M. Greenhouse gas analyzer for measurements of carbon dioxide, methane, and water vapor aboard an unmanned aerial vehicle. Sens. Actuators B Chem. 2012, 169, 128–135. [Google Scholar] [CrossRef]
- Si, S. Air Pollutant Monitoring Device. International Patent WO2019034949A1, 21 February 2019. [Google Scholar]
- Fixed-Wing vs. Multirotor Drones: Which is Better? Available online: https://geonadir.com/fixed-wing-vs-multirotor-drones/ (accessed on 6 February 2024).
- Dileep, M.R.; Navaneeth, A.V.; Ullagaddi, S.; Danti, A. A Study and Analysis on Various Types of Agriculturl Drones and its Applications. In Proceedings of the Fifth International Conference on Research in Computational Intelligence and Communication Networks (ICRCICN), Bangalore, India, 26–27 November 2020. [Google Scholar] [CrossRef]
- Drone Types: Multi-Rotor, Fixed-Wing, Single Rotor, Hybrid VTOL. Available online: https://www.auav.com.au/articles/drone-types/#1 (accessed on 18 January 2024).
- Shukla, D.; Komerath, N. Multirotor drone aerodynamic interaction investigation. Drones 2018, 2, 43. [Google Scholar] [CrossRef]
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned aerial systems for civil applications: A review. Drones 2017, 1, 2. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Khan, M. Quadcopter Flight Dynamics. Int. J. Sci. Technol. Res. 2014, 3, 130–135. [Google Scholar]
- DJI M30 Drone Gas Detection. DJI M30 Air Quality Pollution Monitoring Sensor. Available online: https://www.drone-payload.com/product/dji-m30-drone-gas-detection-air-quality-pollution-monitoring-sensor/ (accessed on 27 March 2024).
- Uavfordrone. Drone Air Quality Pollution Monitoring System for DJI Matrice 300. Available online: https://www.uavfordrone.com/product/drone-air-quality-pollution-monitoring-system-for-dji-matrice-300/ (accessed on 27 March 2024).
- Prana Air: Quadcopter Air Quality Drone. Pollution Detector. 4K Camera. Available online: https://www.pranaair.com/air-quality-monitor/air-drone/ (accessed on 27 March 2024).
- DR2000 Drone Based Environmental Monitoring—Scentroid Solutions. Available online: https://scentroid.com/products/analyzers/dr2000-flying-lab/?gad_source=1&gclid=CjwKCAjwh4-wBhB3EiwAeJsppBFzyMoNa8vkVtwS7kAOTLyI8J8ect-cTqzehOR2F_WDDf9S9rCMuBoCCx0QAvD_BwE (accessed on 27 March 2024).
- Sniffer4D. Mobile Air Poluttant Mapping System. Available online: https://sniffer4d.eu/sniffer4d/ (accessed on 27 March 2024).
- SoftBlue. Anti-Smog Drone for Testing PM10 PM2.5 Dust, Producer. Available online: https://softblue.pl/en/products/eco-solutions/airdron/ (accessed on 27 March 2024).
- Alshbatat, A.I.N. Development of Autonomous Hexacopter UAVs for Smart City Air Quality Management. Jordan J. Electr. Eng. 2023, 9, 450–465. [Google Scholar] [CrossRef]
- Rani Hemamalini, R.; Vinodhini, R.; Shanthini, B.; Partheeban, P.; Charumathy, M.; Cornelius, K. Air Quality Monitoring and Forecasting Using Smart Drones and Recurrent Neural Network for Sustainable Development in Chennai City. Sustain. Cities Soc. 2022, 85, 104077. [Google Scholar] [CrossRef]
- Bretschneider, L.; Schlerf, A.; Baum, A.; Bohlius, H.; Buchholz, M.; Düsing, S.; Ebert, V.; Erraji, H.; Frost, P.; Käthner, R.; et al. MesSBAR—Multicopter and Instrumentation for Air Quality Research. Atmosphere 2022, 13, 629. [Google Scholar] [CrossRef]
- Simo, A.; Dzitac, S.; Dzitac, I.; Frigura-Iliasa, M.; Frigura-Iliasa, F.M. Air Quality Assessment System Based on Self-Driven Drone and LoRaWAN Network. Comput. Commun. 2021, 175, 13–24. [Google Scholar] [CrossRef]
- Gu, Q.; Michanowicz, D.R.; Jia, C. Developing a Modular Unmanned Aerial Vehicle (UAV) Platform for Air Pollution Profiling. Sensors 2018, 18, 4363. [Google Scholar] [CrossRef]
- Brady, J.M.; Dale Stokes, M.; Bonnardel, J.; Bertram, T.H. Characterization of a Quadrotor Unmanned Aircraft System for Aerosol-Particle-Concentration Measurements. Environ. Sci. Technol. 2016, 50, 1376–1383. [Google Scholar] [CrossRef]
- Peng, Z.R.; Wang, D.; Wang, Z.; Gao, Y.; Lu, S. A Study of Vertical Distribution Patterns of PM2.5 Concentrations Based on Ambient Monitoring with Unmanned Aerial Vehicles: A Case in Hangzhou, China. Atmos. Environ. 2015, 123, 357–369. [Google Scholar] [CrossRef]
- Alvarado, M.; Gonzalez, F.; Fletcher, A.; Doshi, A. Towards the Development of a Low Cost Airborne Sensing System to Monitor Dust Particles after Blasting at Open-Pit Mine Sites. Sensors 2015, 15, 19667–19687. [Google Scholar] [CrossRef]
- Marin, D.B.; Becciolini, V.; Santana, L.S.; Rossi, G.; Barbari, M. State of the Art and Future Perspectives of Atmospheric Chemical Sensing Using Unmanned Aerial Vehicles: A Bibliometric Analysis. Sensors 2023, 23, 8384. [Google Scholar] [CrossRef]
- Tricco, A.C.; Lillie, E.; Zarin, W.; O’Brien, K.K.; Colquhoun, H.; Levac, D.; Moher, D.; Peters, M.D.J.; Horsley, T.; Weeks, L.; et al. PRISMA Extension for Scoping Reviews (PRISMA-ScR): Checklist and Explanation. Ann. Intern. Med. 2018, 169, 467–473. [Google Scholar] [CrossRef]
- Chen, J.; Hoek, G. Long-term exposure to PM and all-cause and cause-specific mortality: A systematic review and meta-analysis. Environ. Int. 2020, 143, 105974. [Google Scholar] [CrossRef]
- Thangavel, P.; Park, D.; Lee, Y.-C. Recent insights into particulate matter (PM2.5)-mediated toxicity in humans: An overview. Int. J. Environ. Res. Public Health 2022, 19, 7511. [Google Scholar] [CrossRef]
- World Health Organization. Who Global Air Quality Guidelines; World Health Organization: Geneva, Switzerland, 2021; pp. 189–193. [Google Scholar]
- Bodor, K.; Szép, R.; Bodor, Z. The human health risk assessment of Particulate Air Pollution (PM2.5 and PM10) in Romania. Toxicol. Rep. 2022, 9, 556–562. [Google Scholar] [CrossRef]
- Hemamalini, R. A System and Method for Assessing the Air Quality and Pollutant Ratio at Pre-Determined Altitude of. Indian Patent IN202241014209, 8 April 2020. [Google Scholar]
- Avakov, Y. Environmental Monitoring UAV System. U.S. Patent US10175151B2, 8 January 2019. [Google Scholar]
- Deng, Y. Air Quality Monitoring Unmanned Aerial Vehicle. Chinese Patent CN217918426U, 11 November 2022. [Google Scholar]
- Anonymous. Boiler Air Pollutant Emission Supervisory Systems and Method for Inspecting Based on Unmanned Plane Image. Chinese Patent CN109059870A, 13 October 2020. [Google Scholar]
- Tymiński, D. Unmanned Aircraft with Differential Air Pollution Measuring Instrument. Polish Patent PL234716B1, 31 March 2020. [Google Scholar]
- Anonymous. Airborne Computer System for Air Pollution Control. German Patent DE202022103602U1, 20 July 2022. [Google Scholar]
- Kwon, S. Method of Monitoring Air Pollution and System for the Same. South Korean Patent KR102035693B1, 23 October 2019. [Google Scholar]
- Kiguchi, O. Atmospheric Environment Measuring Method and Wireless Sensor System. Japanese Patent JP2022059848A, 14 April 2022. [Google Scholar]
- Wang, H. A Kind of Air-Ground Integrated Atmospheric Monitoring System in Day. Chinese Patent CN110068655A, 22 April 2022. [Google Scholar]
- Liu, W. Atmospheric Pollution Monitoring System Based on Fixed-Wing Unmanned Aerial Vehicle and Data Processing Method. Chinese Patent CN112305163A, 7 April 2023. [Google Scholar]
- Peng, Z. Unmanned Aerial Vehicle System for On-Line Monitoring of Atmospheric Environment and Controlled Sampling of Atmosphere. Chinese Patent CN107422747B, 20 June 2023. [Google Scholar]
- Yu, J. Atmospheric Pollution Space-Air-Ground Integrated Real-Time Monitoring System and Method. Chinese Patent CN113804829A, 17 December 2021. [Google Scholar]
- Feng, X. Layout Optimization Method of Port Atmospheric Particulate Matter Concentration Online Detector. Chinese Patent CN110889199A, 23 September 2022. [Google Scholar]
- Kelly, K.E.; Whitaker, J.; Petty, A.; Widmer, C.; Dybwad, A.; Sleeth, D.; Martin, R.; Butterfield, A. Ambient and Laboratory Evaluation of a Low-Cost Particulate Matter Sensor. Environ. Pollut. 2017, 221, 491–500. [Google Scholar] [CrossRef]
- Sánchez-Barajas, M.A.; Cuevas-González, D.; Reyna, M.A.; Delgado-Torres, J.C.; Altamira-Colado, E.; López-Avitia, R. Development of a Low-Cost Particulate Matter Optical Sensor for Real-Time Monitoring. Eng. Proc. 2023, 58, 4. [Google Scholar] [CrossRef]
- Kokate, P.; Middey, A.; Sadistap, S.; Sarode, G.; Narayan, A. Review on Drone-Assisted Air-Quality Monitoring Systems. DAV 2023, 1, 10005. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model/Name | Manufacturer | Detected Substances/Pollutants |
|---|---|---|
| DJI M30 drone gas detection air quality pollution monitoring sensor [37] | Drone-Payload, Shenzhen, China | PM2.5, PM10, SO2, CO, NO2, O2, O3, VOCs, CH4, CO2, HF, H2S, NH3, HCl, H2, Cl2, PH3, NO, HCN |
| Drone Air Quality Pollution Monitoring System for DJI Matrice 300 [38] | UAVFORDRONE, Shenzhen, China | PM2.5, PM10, SO2, CO, NO2, O2, O3, VOCs, CH4, CO2, H2S, NH3, HCl, H2, Cl2, PH3, TSP |
| Prana Air-Air Quality Monitoring Drone [39] | Prana Air, Delhi, India | PM, SO2, NO2, CO2, NH3, O3 |
| DR2000 Drone-Based Environmental Monitoring and Air Quality Analyzer [40] | Scentroid, Whitchurch-Stouffville, Canada | PM1, PM2.5, PM4, PM10, VOCs, CO2, CH4 Total Reduced Sulfurs (TRS) |
| Sniffer4D—Mobile Air Pollutant Mapping System [41] | TPI, Warszawa, Poland | PM2.5, PM10, SO2, H2S, TSP, O3, NO2, NH3, H2, CO, HCl, VOCs |
| AirDron [42] | SoftBlue SA, Warszawa, Poland | PM1, PM2.5, PM10, CH2O, HCl, HCN, NH3, H2S, VOCs |
| Title | Detected Substances/Pollutants | Year of Publication |
|---|---|---|
| Development of Autonomous Hexacopter UAVs for Smart City Air Quality Management [43] | PM2.5 | 2023 |
| Air quality monitoring and forecasting using smart drones and recurrent neural network for sustainable development in Chennai city [44] | Liquid petroleum gas, propane, CH4, H2, PM2.5, PM10, VOC, CO, CO2, NO2, SO2 | 2022 |
| MesSBAR—Multicopter and Instrumentation for Air Quality Research [45] | PM1, PM2.5, PM4, PM10, CO, NO, NO2, O3 | 2022 |
| Air quality assessment system based on self-driven drone and LoRaWAN network [46] | CO, NO, NO2, SO2, PM1, PM2.5, PM10, H2, CH4, CO2 | 2021 |
| Autonomous monitoring, analysis, and countering of air pollution using environmental drones [1] | CO2, CO, NH3, SO2, PM, O3, NO2 | 2020 |
| Developing a Modular Unmanned Aerial Vehicle (UAV) Platform for Air Pollution Profiling [47] | PM1, PM2.5, PM10, NO2 | 2018 |
| Characterization of a Quadrotor Unmanned Aircraft System for Aerosol-Particle-Concentration Measurements [48] | PM, CO2 | 2016 |
| A study of vertical distribution patterns of PM2.5 concentrations based on ambient monitoring with unmanned aerial vehicles: A case in Hangzhou, China [49] | PM2.5 | 2015 |
| Towards the Development of a Low Cost Airborne Sensing System to Monitor Dust Particles after Blasting at Open-Pit Mine Sites [50] | PM10 | 2015 |
| Inclusion | Exclusion |
|---|---|
| Must include particulate matter sensors (PM10, PM2.5) | Static environmental sensor |
| Sensor is placed in a drone | Indoor air monitoring |
| All patents regardless of the language were screened |
| Source | Input Query String | |||||
|---|---|---|---|---|---|---|
| “Drone” AND “PM 10” | “Drone” AND “PM 2.5” | “UAV” AND “PM 10” | “UAV” AND “PM 2.5” | “Aircraft” AND “PM 10” | “Aircraft” AND “PM 2.5” | |
| Google Patents | 70 | 11 | 29 | 5 | 440 | 24 |
| Patentscope by WIPO | 72 | 41 | 11 | 7 | 290 | 83 |
| USPTO | 87 | 22 | 26 | 5 | 110 | 140 |
| ID | Patent # | Title | Status | Grant Date | Inventor | Assignee | Type of Drone | PM Sensor(s) Measurement Technology | Measured Substance(s) | Copes with Turbulence Produced by Propellers | Includes Cyclone Separator |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | US10175151B2 [58] | Environmental monitoring UAV system | Active | 8 January 2019 | Yaaqov Avakov | Sami Shamoon College Of Engineering (R.A.) | Rotary-wing | Not mentioned | Any/not specified | No | Not included |
| B | KR102035693B1 [63] | Method of monitoring air pollution and system for the same | Pending | 23 October 2019 | Kwon Seung Joon | N/A | Not mentioned | Not mentioned | PM10, O3, SO2, CO, NO2, Pb | No | Not mentioned |
| C | PL234716B1 [61] | Unmanned aircraft with differential air pollution measuring instrument | Pending | 31 March 2020 | Dariusz Tymiński | Spolka Jawna, Univ Wroclawski | Quadcopter | Not mentioned | PM10, PM2.5, CO2, O3, SO2, HCl | No | Not mentioned |
| D | CN109059870A [60] | Boiler Air Pollutant Emission supervisory systems and method for inspecting based on unmanned plane image | Active | 13 October 2020 | Anonymous | Henan Blue Sky Yunhai Aviation Technology Co., Ltd. | Not mentioned | Not mentioned | PM 10, PM2.5 | No | Not mentioned |
| E | CN113804829A [68] | Atmospheric pollution space-air-ground integrated real-time monitoring system and method | Pending | 17 December 2021 | Yu Jiayan | Sichuan Ecological Environment Monitoring Station, Chongqing Ecological Environment Monitoring Center, Chongqing Institute of Green and Intelligent Technology of CAS | Fixed-wing | Laser | PM10, PM2.5, PM1, O3, NO2, SO2 | No | Not mentioned |
| F | IN202241014209 [57] | A system and method for assessing the air quality and pollutant ratio at determined altitude of | Active | 8 April 2022 | R. Rani Hemamalini | N/A | Not mentioned | Infrared | CO, CO2, NO2, SO2, PM, Volatile Organic Compounds (VOC) | No | Not included |
| G | JP2022059848A [64] | Atmospheric environment measuring method and wireless sensor system | Pending | 14 April 2022 | Kiguchi Osamu | Akita Prefectural University | Bicopter | Not mentioned | PM2.5 | No | Not mentioned |
| H | CN110068655A [65] | A kind of air-ground integrated atmospheric monitoring system in day | Active | 22 April 2022 | Wang Haowei | Institute of Urban Environment of CAS | Not mentioned | Not mentioned | PM10, PM2.5, CO, NO, SO2, NO2, O3 | No | Not included |
| I | DE202022103602U1 [62] | Airborne computer system for air pollution control | Active | 20 July 2022 | Anonymous | Graphic Era Deemed to be University | Quadcopter | Not mentioned | PM2.5 | No | Not included |
| J | CN110889199A [69] | Layout optimization method of port atmospheric particulate matter concentration online detector | Active | 23 September 2022 | Feng Xuejung | Hohai University HHU | Not mentioned | Not mentioned | PM2.5, PM10, TSP (Total Suspended Particles) | No | Not mentioned |
| K | CN217918426U [59] | Air quality monitoring unmanned aerial vehicle | Active | 29 November 2022 | Deng Yong Bing | Guogu Aviation Technology Hangzhou Co., Ltd. | Quadcopter | Not mentioned | PM2.5, PM10 | No | Not included |
| L | CN112305163A [66] | Atmospheric pollution monitoring system based on fixed-wing unmanned aerial vehicle and data processing method | Active | 7 April 2023 | Liu Wei | Northwestern Polytechnical University | Fixed-wing | Not mentioned | PM2.5, PM10, O3, NOx, CO, SO2 | Only considers affectation caused by the natural movement of wind | Not included |
| M | CN107422747B [67] | Unmanned aerial vehicle system for on-line monitoring of atmospheric environment and controlled sampling of atmosphere | Active | 20 June 2023 | Peng Zhongren | Shanghai Jiaotong University | Not mentioned | Not mentioned | PM2.5, PM10, O3, black carbon | No | Not mentioned |
| ID | Patent # | Includes Sampling Function | Inclusion of GPS Tracking Unit Explicitly Mentioned | Does Spatial Distribution Analysis | A Camera Is Integrated in the Drone |
|---|---|---|---|---|---|
| A | US10175151B2 [58] | ✓ | ✓ | ||
| B | KR102035693B1 [63] | ✓ | ✓ | ✓ | |
| C | PL234716B1 [61] | ✓ | ✓ | ||
| D | CN109059870A [60] | ✓ | ✓ | ||
| E | CN113804829A [68] | ✓ | |||
| F | IN202241014209 [57] | ✓ | |||
| G | JP2022059848A [64] | ✓ | ✓ | ||
| H | CN110068655A [65] | ✓ | ✓ | ✓ | |
| I | DE202022103602U1 [62] | ||||
| J | CN110889199A [69] | ✓ | |||
| K | CN217918426U [59] | ✓ | |||
| L | CN112305163A [66] | ✓ | |||
| M | CN107422747B [67] | ✓ | ✓ | ✓ | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Altamira-Colado, E.; Cuevas-González, D.; Reyna, M.A.; García-Vázquez, J.P.; Avitia, R.L.; Osornio-Vargas, A.R. Drone-Assisted Particulate Matter Measurement in Air Monitoring: A Patent Review. Atmosphere 2024, 15, 515. https://doi.org/10.3390/atmos15050515
Altamira-Colado E, Cuevas-González D, Reyna MA, García-Vázquez JP, Avitia RL, Osornio-Vargas AR. Drone-Assisted Particulate Matter Measurement in Air Monitoring: A Patent Review. Atmosphere. 2024; 15(5):515. https://doi.org/10.3390/atmos15050515
Chicago/Turabian StyleAltamira-Colado, Eladio, Daniel Cuevas-González, Marco A. Reyna, Juan Pablo García-Vázquez, Roberto L. Avitia, and Alvaro R. Osornio-Vargas. 2024. "Drone-Assisted Particulate Matter Measurement in Air Monitoring: A Patent Review" Atmosphere 15, no. 5: 515. https://doi.org/10.3390/atmos15050515
APA StyleAltamira-Colado, E., Cuevas-González, D., Reyna, M. A., García-Vázquez, J. P., Avitia, R. L., & Osornio-Vargas, A. R. (2024). Drone-Assisted Particulate Matter Measurement in Air Monitoring: A Patent Review. Atmosphere, 15(5), 515. https://doi.org/10.3390/atmos15050515