
Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer


Abstract
:
1. Introduction
2. Experimental Design and Methods
2.1. Data Reduction Approach
2.2. Physical Components
2.3. Sonic Anemometer
2.4. Measurement Procedures
2.5. Implementation of Data Reduction
3. Results and Discussion
3.1. Measurement Site Overview
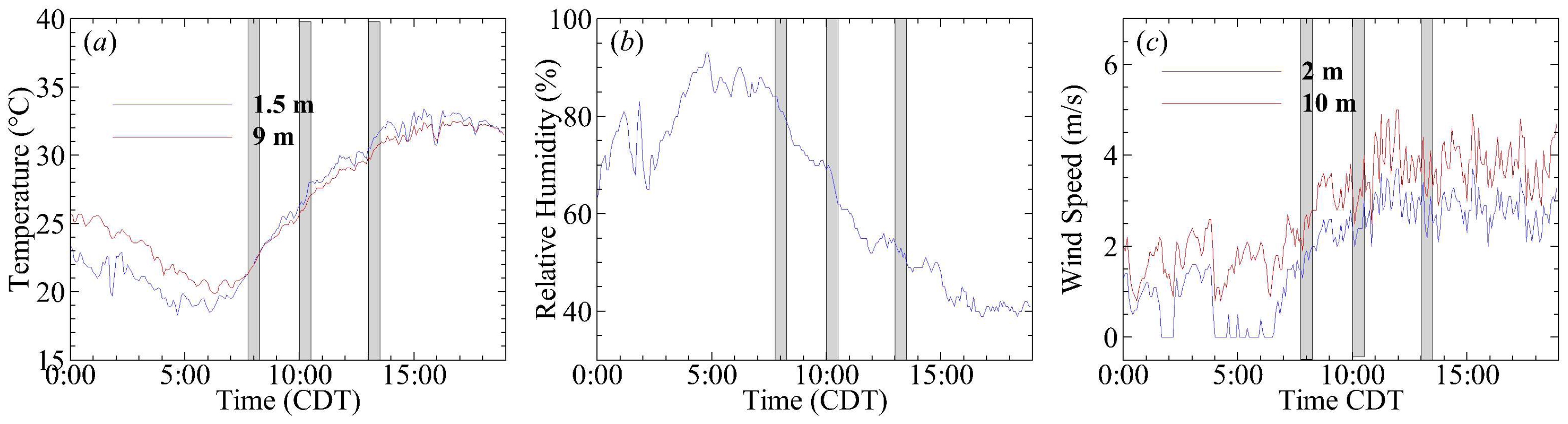
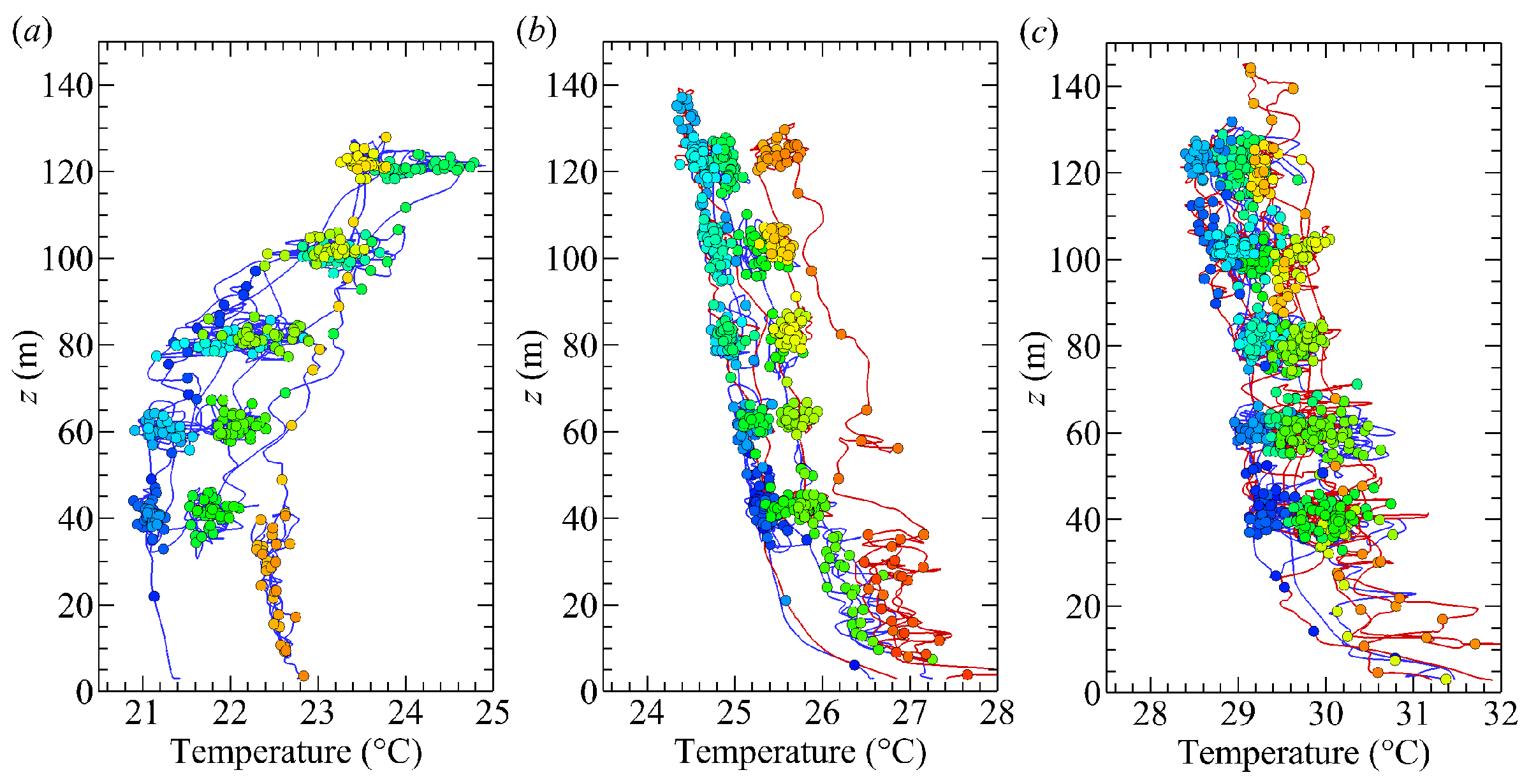
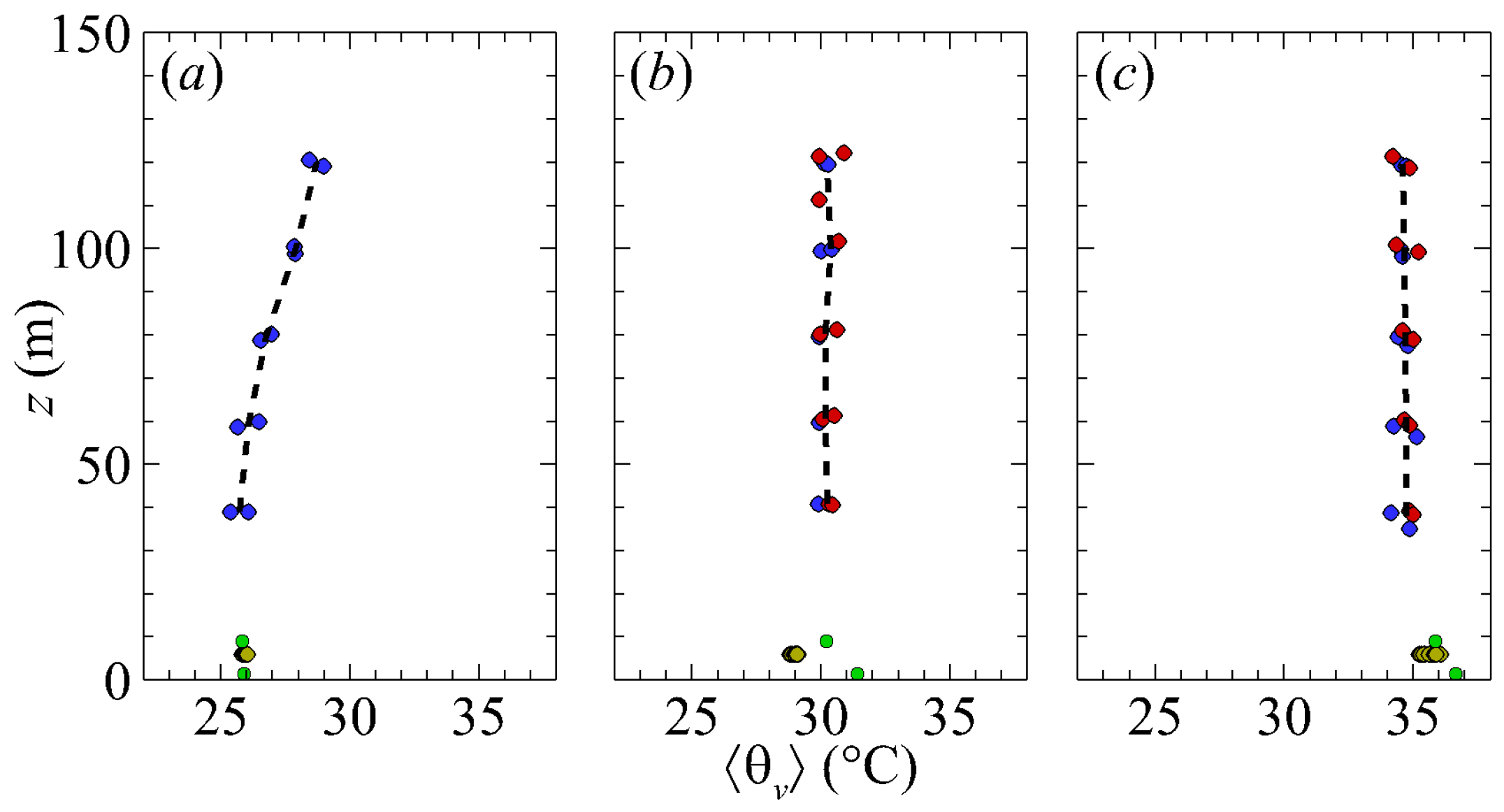
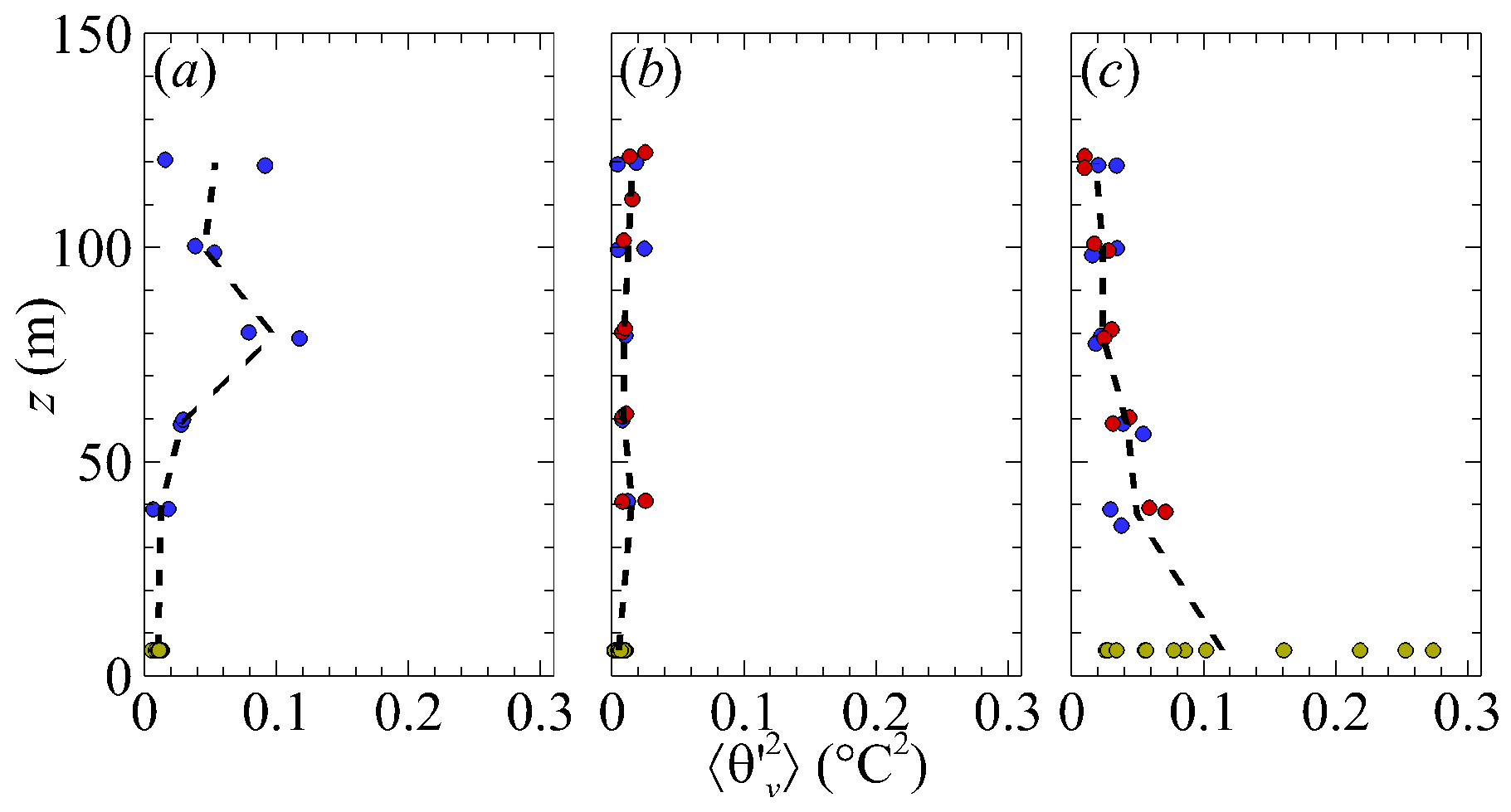
3.2. Temperature and Humidity
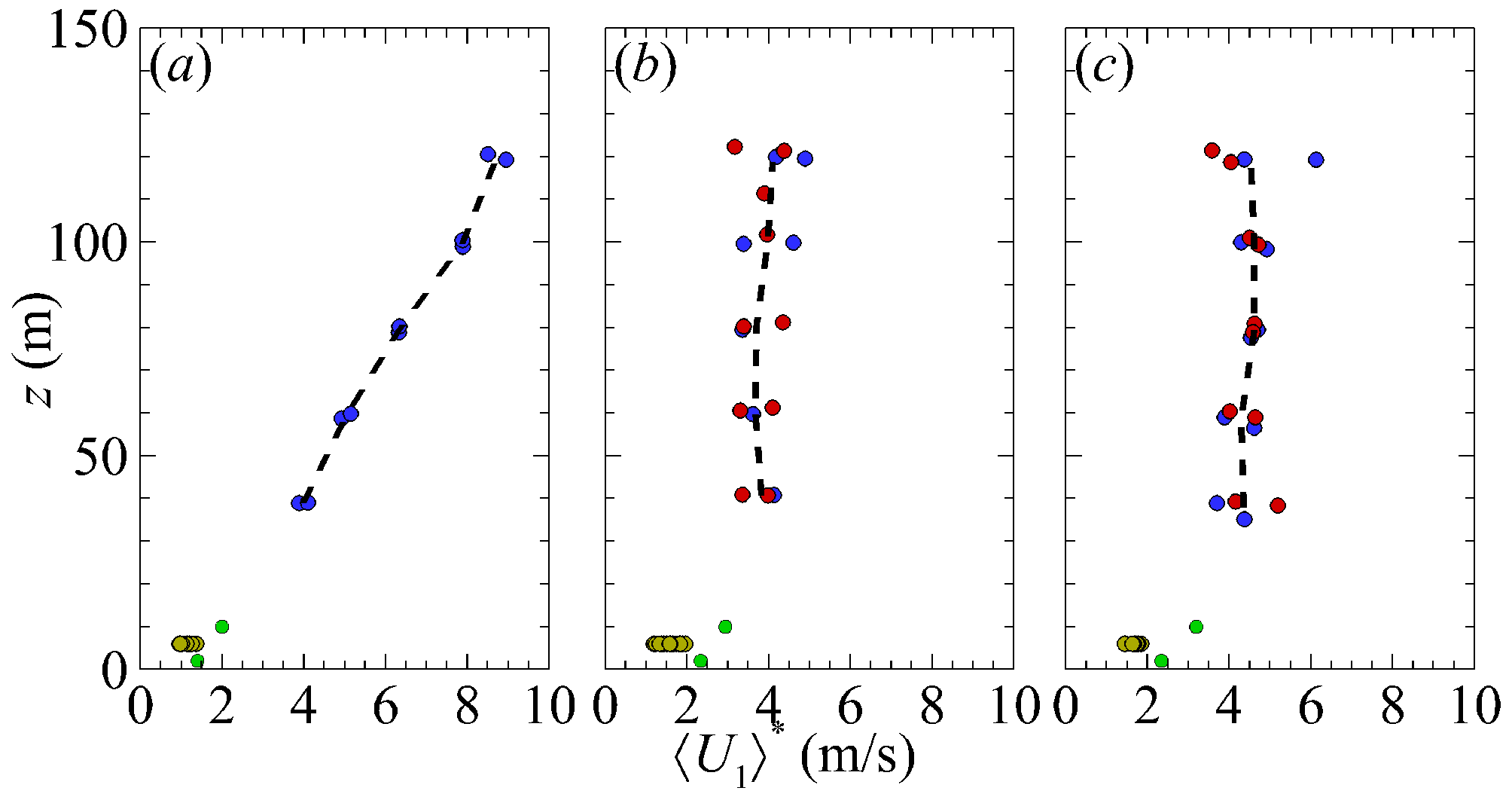
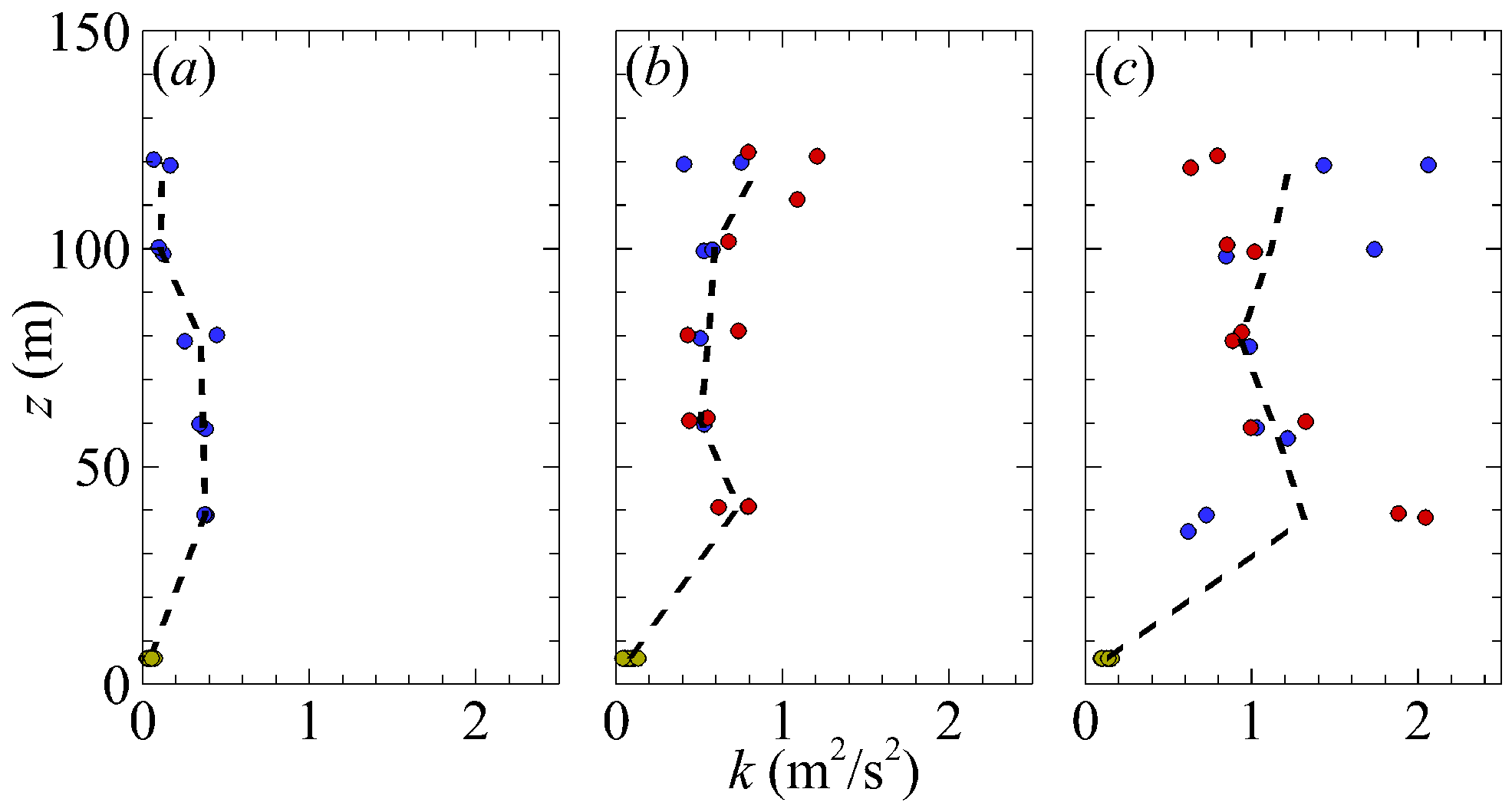
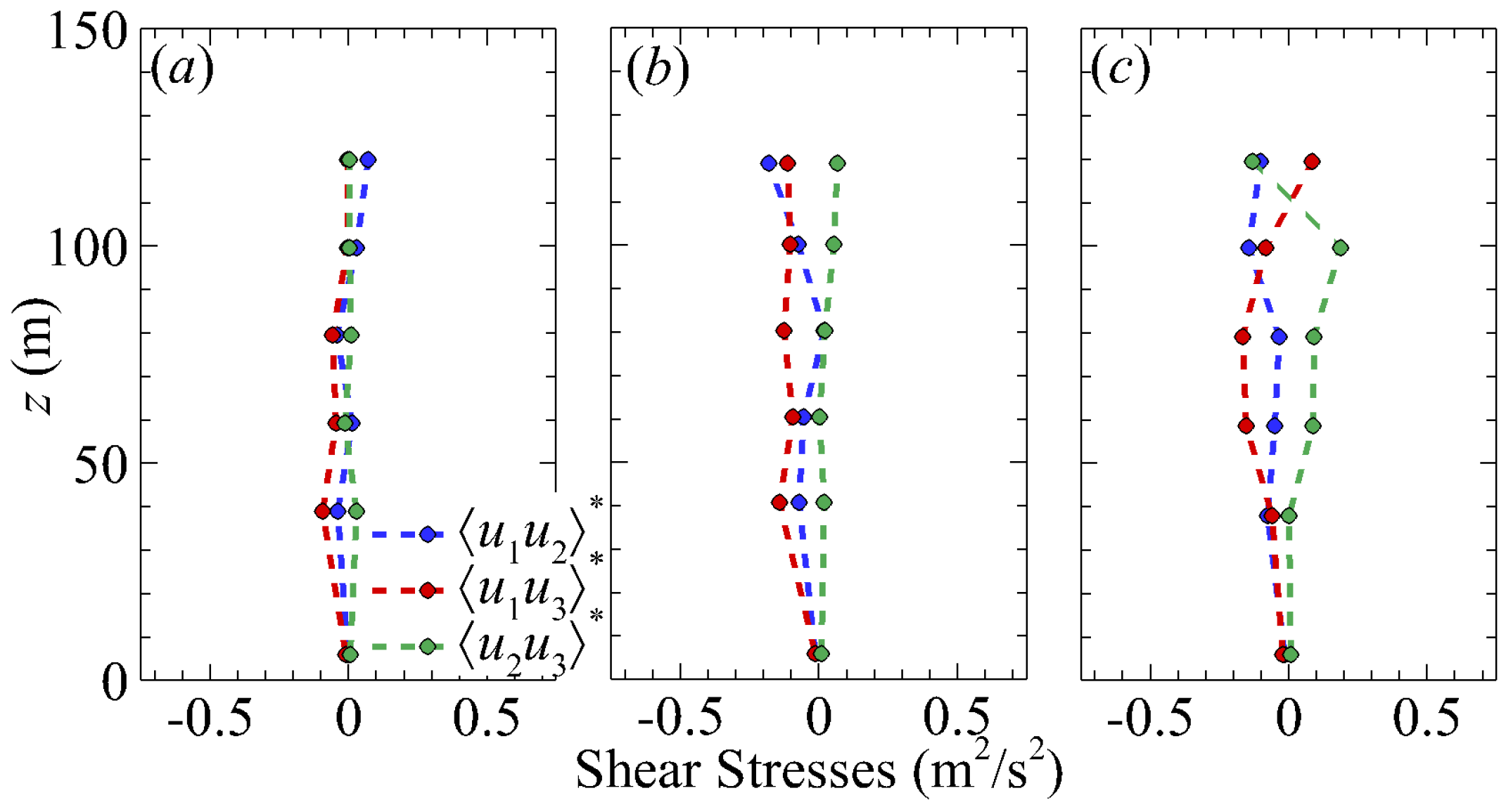
3.3. Wind Velocity
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| BLUECAT5 | Boundary Layer Unmanned vehicle for Experimentally Characterizing Atmospheric Turbulence, version 5 |
| CLOUDMAP | Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics |
| DAQ | Data acquisition |
| FAA | Federal Aviation Authority |
| GPS | Global positioning system |
| INS | Inertial navigation system |
| PC | Personal computer |
| PVC | Polyvinyl chloride |
| RH | Relative humidity |
| RMSE | Root-mean-square error |
| SD | Secure Digital |
| UAS | Unmanned aerial system |
| UAV | Unmanned aerial vehicle |
| USB | Universal Serial Bus |
References
- Stull, R. An Introduction to Boundary Layer Meteorology; Springer: Heidelberg, Germany, 1988. [Google Scholar]
- Yahaya, S.; Frangi, J. Cup anemometer response to the wind turbulence-measurement of the horizontal wind variance. Ann. Geophys. 2004, 22, 3363–3374. [Google Scholar] [CrossRef]
- Taylor, G.I. The spectrum of turbulence. Proceed. R. Soc. Lond. 1938, 164, 476–490. [Google Scholar] [CrossRef]
- Zaman, K.; Hussain, A. Taylor hypothesis and large-scale coherent structures. J. Fluid Mech. 1981, 112, 379–396. [Google Scholar] [CrossRef]
- Monty, J.; Hutchins, N.; Ng, H.; Marusic, I.; Chong, M. A comparison of turbulent pipe, channel and boundary layer flows. J. Fluid Mech. 2009, 632, 431–442. [Google Scholar] [CrossRef]
- del Álamo, J.; Jiménez, J. Estimation fo turbulent convection velocities and corrections to Taylor’s approximation. J. Fluid Mech. 2009, 640, 5–26. [Google Scholar] [CrossRef]
- Higgins, C.; Froidevaux, M.; Simeonov, V.; Vercauteren, N.; Barry, C.; Parlange, M. The Effect of Scale on the Applicability of Taylor’s Frozen Turbulence Hypothesis in the Atmospheric Boundary Layer. Bound-Lay. Meteorol. 2012, 143, 379–391. [Google Scholar] [CrossRef] [Green Version]
- Guala, M.; Metzger, M.; McKeon, B. Interactions within the turbulent boundary layer at high Reynolds number. J. Fluid Mech. 2011, 666, 573–604. [Google Scholar] [CrossRef]
- Metzger, M.; Holmes, H. Time Scales in the Unstable Atmospheric Surface Layer. Bound-Lay. Meteorol. 2008, 126, 29–50. [Google Scholar] [CrossRef]
- Treviño, G.; Andreas, E. On Reynolds Averaging of Turbulence Time Series. Bound-Lay. Meteorol. 2008, 128, 303–311. [Google Scholar] [CrossRef]
- Payne, F.; Lumley, J. One-dimensional spectra derived from an airborne hot-wire anemometer. Q. J. R. Meteorol. Soc. 1966, 92, 397–401. [Google Scholar] [CrossRef]
- Lenschow, D.; Johnson, W. Concurrent Airplane and Balloon Measurments of Atmospheric Boundary Layer Structure Over A Forest. J. Appl. Meteor. 1968, 7, 79–89. [Google Scholar] [CrossRef]
- Sheih, C.M.; Tennekes, H.; Lumley, J. Airborne hot-wire measurements of the small-scale structure of atmospheric turbulence. Phys. Fluids 1971, 14, 201–215. [Google Scholar] [CrossRef]
- Eberhard, W.; Cupp, R.; Healey, K. Doppler lidar measurement of profiles of turbulence and momentum flux. J. Atmos. Oceanic Technol. 1989, 6, 809–819. [Google Scholar] [CrossRef]
- Bogel, W.; Baumann, R. Test and Calibration of the DLR Falcon Wind Measuring System by Maneuvers. J. Atmos. Ocean. Technol. 1991, 8, 5–18. [Google Scholar] [CrossRef]
- Angevine, W.; Avery, S.; Kok, J. Virtual heat flux measurements from a boundary-layer profiler-RASS compared to aircraft measurements. J. Appl. Meteorol. 1993, 32, 1901–1907. [Google Scholar] [CrossRef]
- Wood, R.; Stromberg, I.M.; Jonas, P.R.; Mill, C.S. Analysis of an Air Motion System on a Light Aircraft for Boundary Layer Research. J. Atmos. Ocean. Technol. 1997, 14, 960–968. [Google Scholar] [CrossRef]
- Philbrick, C. Raman Lidar Descriptions of Lower Atmosphere Processes. In Proceedings of the 21st ILRC, Valcartier, Quebec, Canada, 8–12 July 2002; pp. 535–545. [Google Scholar]
- Cho, J.Y.N.; Newell, R.E.; Anderson, B.E.; Barrick, J.D.W.; Thornhill, K.L. Characterizations of tropospheric turbulence and stability layers from aircraft observations. J. Geophys. Res. Atmos. 2003, 108, D20. [Google Scholar] [CrossRef]
- Kalogiros, J.A.; Wang, Q. Calibration of a Radome-Differential GPS System on a Twin Otter Research Aircraft for Turbulence Measurements. J. Atmos. Ocean. Tech. 2002, 19, 159–171. [Google Scholar] [CrossRef]
- Kalogiros, J.A.; Wang, Q. Aerodynamic Effects on Wind Turbulence Measurements with Research Aircraft. J. Atmos. Ocean. Technol. 2002, 19, 1567–1576. [Google Scholar] [CrossRef]
- Matvev, V.; Dayan, U.; Tass, I.; Peleg, M. Atmospheric sulfur flux rates to and from Israel. Sci. Total Environ. 2002, 291, 143–154. [Google Scholar] [CrossRef]
- LeMone, M.A.; Grossman, R.L.; Chen, F.; Ikeda, K.; Yates, D. Choosing the Averaging Interval for Comparison of Observed and Modeled Fluxes along Aircraft Transects over a Heterogeneous Surface. J. Hydrometeorol. 2003, 4, 179–195. [Google Scholar] [CrossRef]
- Kalogiros, J.; Wang, Q. Aircraft Observations of Sea-Surface Turbulent Fluxes Near the California Coast. Bound-Lay. Meteorol. 2011, 139, 283–306. [Google Scholar] [CrossRef]
- Vellinga, O.S.; Dobosy, R.J.; Dumas, E.J.; Gioli, B.; Elbers, J.A.; Hutjes, R.W.A. Calibration and Quality Assurance of Flux Observations from a Small Research Aircraft. J. Atmos. Ocean. Technol. 2013, 30, 161–181. [Google Scholar] [CrossRef]
- Zulueta, R.C.; Oechel, W.C.; Verfaillie, J.G.; Hastings, S.J.; Gioli, B.; Lawrence, W.T.; Paw, U.K.T. Aircraft Regional-Scale Flux Measurements over Complex Landscapes of Mangroves, Desert, and Marine Ecosystems of Magdalena Bay, Mexico. J. Atmos. Ocean. Technol. 2013, 30, 1266–1294. [Google Scholar] [CrossRef]
- Mallaun, C.; Giez, A.; Baumann, R. Calibration of 3-D wind measurements on a single-engine research aircraft. Atmos. Meas. Tech. 2015, 8, 3177–3196. [Google Scholar] [CrossRef] [Green Version]
- Metzger, S.; Junkermann, W.; Butterbach-Bahl, K.; Schmid, H.P.; Foken, T. Measuring the 3-D wind vector with a weight-shift microlight aircraft. Atmos. Meas. Tech. 2011, 4, 1421–1444. [Google Scholar] [CrossRef]
- Egger, J.; Bajrachaya, S.; Heingrich, R.; Kolb, P.; Lammlein, S.; Mech, M.; Reuder, J.; Schäper, W.; Shakya, P.; Shween, J.; et al. Diurnal Winds in the Himalayan Kali Gandaki Valley. Part III: Remotely Piloted Aircraft Soundings. Mon. Weather Rev. 2002, 130, 2042–2058. [Google Scholar] [CrossRef]
- Hobbs, S.; Dyer, D.; Courault, D.; Olioso, A.; Lagouarde, J.P.; Kerr, Y.; McAnneney, J.; Bonnefond, J. Surface layer profiles of air temperature and humidity measured from unmanned aircraft. Agronomie 2002, 22, 635–640. [Google Scholar] [CrossRef] [Green Version]
- Eheim, C.; Dixon, C.; Agrow, B.; Palo, S. Tornado Chaser: A remotely-piloted UAV for in situ meteorological measurements; AIAA Paper 2002-3479. In Proceedings of the 1st AIAA Unmanned Aerospace Vehicles, Systems, Technologies, and Operations Conference and Workshop, Portsmouth, VA, USA, 20–22 May 2002. [Google Scholar]
- Spiess, T.; Bange, J.; Buschmann, M.; Vörsmann, P. First application of the meteorological Mini-UAV ’M2AV’. Meteorol. Zeitschrift 2007, 16, 159–169. [Google Scholar] [CrossRef] [PubMed]
- van den Kroonenberg, A.; Martin, T.; Buschmann, M.; Bange, J.; Vörsmann, P. Measuring the Wind Vector Using the Autonomous Mini Aerial Vehicle M2AV. J. Atmos. Ocean. Technol. 2008, 25, 1969–1982. [Google Scholar] [CrossRef]
- Martin, S.; Beyrich, F.; Bange, J. Observing Entrainment Processes Using a Small Unmanned Aerial Vehicle: A Feasibility Study. Bound-Lay. Meteorol. 2014, 150, 449–467. [Google Scholar] [CrossRef]
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pope, D. Overview of Small Fixed-Wing Unmanned Aircraft for Meteorological Sampling. J. Atmos. Ocean. Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Wildmann, N.; Rau, G.A.; Bange, J. Observations of the Early Morning Boundary-Layer Transition with Small Remotely-Piloted Aircraft. Bound-Lay. Meteorol. 2015, 157, 345–373. [Google Scholar] [CrossRef]
- Platis, A.; Altstädter, B.; Wehner, B.; Wildmann, N.; Lampert, A.; Hermann, M.; Birmili, W.; Bange, J. An Observational Case Study on the Influence of Atmospheric Boundary-Layer Dynamics on New Particle Formation. Bound-Lay. Meteorol. 2016, 158, 67–92. [Google Scholar] [CrossRef]
- Lampert, A.; Pätzold, F.; Jiménez, M.A.; Lobitz, L.; Martin, S.; Lohmann, G.; Canut, G.; Legain, D.; Bange, J.; Martínez-Villagrasa, D.; et al. A study of local turbulence and anisotropy during the afternoon and evening transition with an unmanned aerial system and mesoscale simulation. Atmos. Chem. Phys. 2016, 16, 8009–8021. [Google Scholar] [CrossRef]
- Mayer, S.; Jonassen, M.; Sandvik, A.; Reuder, J. Atmospheric Profiling with the UAS SUMO: A New Perspective for the Evaluation of Fine-Scale Atmospheric Models. Meteorol. Atmos. Phys. 2012, 116, 15–26. [Google Scholar] [CrossRef]
- Thomas, R.M.; Lehmann, K.; Nguyen, H.; Jackson, D.L.; Wolfe, D.; Ramanathan, V. Measurement of Turbulent Water Vapor Fluxes Using a Lightweight Unmanned Aerial Vehicle System. Atmos. Meas. Tech. 2012, 5, 5529–5568. [Google Scholar] [CrossRef]
- Axford, D.N. On the Accuracy of Wind Measurements Using an Inertial Platform in an Aircraft, and an Example of a Measurement of the Vertical Mesostructure of the Atmosphere. J. Appl. Meteorol. 1968, 7, 645–666. [Google Scholar] [CrossRef]
- Lenschow, D. The Measurement of Air Velocity and Temperature Using the NCAR Buffalo Aircraft Measuring System; National Center for Atmospheric Research: Boulder, CO, USA, 1972. [Google Scholar]
- Broxmeyer, C.; Leondes, C.I. Inertial Navigation Systems. J. Appl. Mechan. 1964, 31, 735. [Google Scholar] [CrossRef]
- Wittmer, K.; Devenport, W.; Zsoldos, J. A four-sensor hot-wire probe system for three-component velocity measurement. Exp. Fluids 1998, 24, 416–423. [Google Scholar] [CrossRef]
- Döbbeling, K.; Lenze, B.; Leuckel, W. Computer-aided calibration and measurements with quadruple hotwire probes. Exp. Fluids 1990, 8, 257–262. [Google Scholar] [CrossRef]
- Etkin, B. Dynamics of Atmospheric Flight; Dover Publications: Mineola, NY, USA, 2000. [Google Scholar]
- Leis, J.A.; Masters, J.M.; Center, A.O. Wind measurement from aircraft. Available online: http://www.arl.noaa.gov/documents/reports/ARL%20TM-266.pdf (accessed on 4 October 2017).
- Phillips, W.F. Mechanics of Flight; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Treaster, A.L.; Yocum, A.M. The Calibration and Application of Five-Hole Probes; Technical Report; Defense Technical Information Center (DTIC) Document: Fort Belvoir, VA, USA, 1978. [Google Scholar]
- Wildmann, N.; Ravi, S.; Bange, J. Towards higher accuracy and better frequency response with standard multi-hole probes in turbulence measurement with remotely piloted aircraft (RPA). Atmos. Meas. Tech. 2014, 7, 1027–1041. [Google Scholar] [CrossRef]
- Bohn, D.; Simon, H. Mehrparametrige Approximation der Eichräume und Eichflächen von Unterschall-bzw. Überschall-5-Loch-Sonden. tm-Technisches Messen 1975, 468, 81–89. [Google Scholar] [CrossRef]
- Tavoularis, S. Measurement in Fluid Mechanics; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Townsend, A.A. The Structure of Turbulent Shear Flow; Cambridge University Press: Cambridge, UK, 1976. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient | Kirk RMSE | Spock RMSE |
|---|---|---|
| 0.0984° | 0.1250° | |
| 0.0976° | 0.1248° | |
| 0.0056 | 0.0099 | |
| 0.05 ms−1 | 0.09 ms−1 |
| System (Component) | Acquisition Rate |
|---|---|
| Pixhawk (6-DoF attitude) | 50 Hz |
| Pixhawk (Airspeed and barometric pressure) | 10 Hz |
| Pixhawk (GPS data) | 5 Hz |
| iMet-XQ | 1 Hz |
| USB-1608FS-Plus data acquisition unit | 1000 Hz |
| VectorNav VN-300 INS | 200 Hz |
| Flight # | BC5A Takeoff | BC5B Takeoff | Radius (m) A/B | Altitudes (m Above Ground) |
|---|---|---|---|---|
| Flight 1 | 07:41 CDT (UTC-5) | N/A | 80/100 | (40, 60, 80, 100, 120) |
| Flight 2 | 09:57 CDT (UTC-5) | 09:58 CDT (UTC-5) | 80/100 | (40, 60, 80, 100, 120) |
| Flight 3 | 13:09 CDT (UTC-5) | 13:05 CDT (UTC-5) | 80/100 | (40, 60, 80, 100, 120) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Witte, B.M.; Singler, R.F.; Bailey, S.C.C. Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer. Atmosphere 2017, 8, 195. https://doi.org/10.3390/atmos8100195
Witte BM, Singler RF, Bailey SCC. Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer. Atmosphere. 2017; 8(10):195. https://doi.org/10.3390/atmos8100195
Chicago/Turabian StyleWitte, Brandon M., Robert F. Singler, and Sean C. C. Bailey. 2017. "Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer" Atmosphere 8, no. 10: 195. https://doi.org/10.3390/atmos8100195
APA StyleWitte, B. M., Singler, R. F., & Bailey, S. C. C. (2017). Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer. Atmosphere, 8(10), 195. https://doi.org/10.3390/atmos8100195