
Operational Application of Optical Flow Techniques to Radar-Based Rainfall Nowcasting


Abstract
:1. Introduction
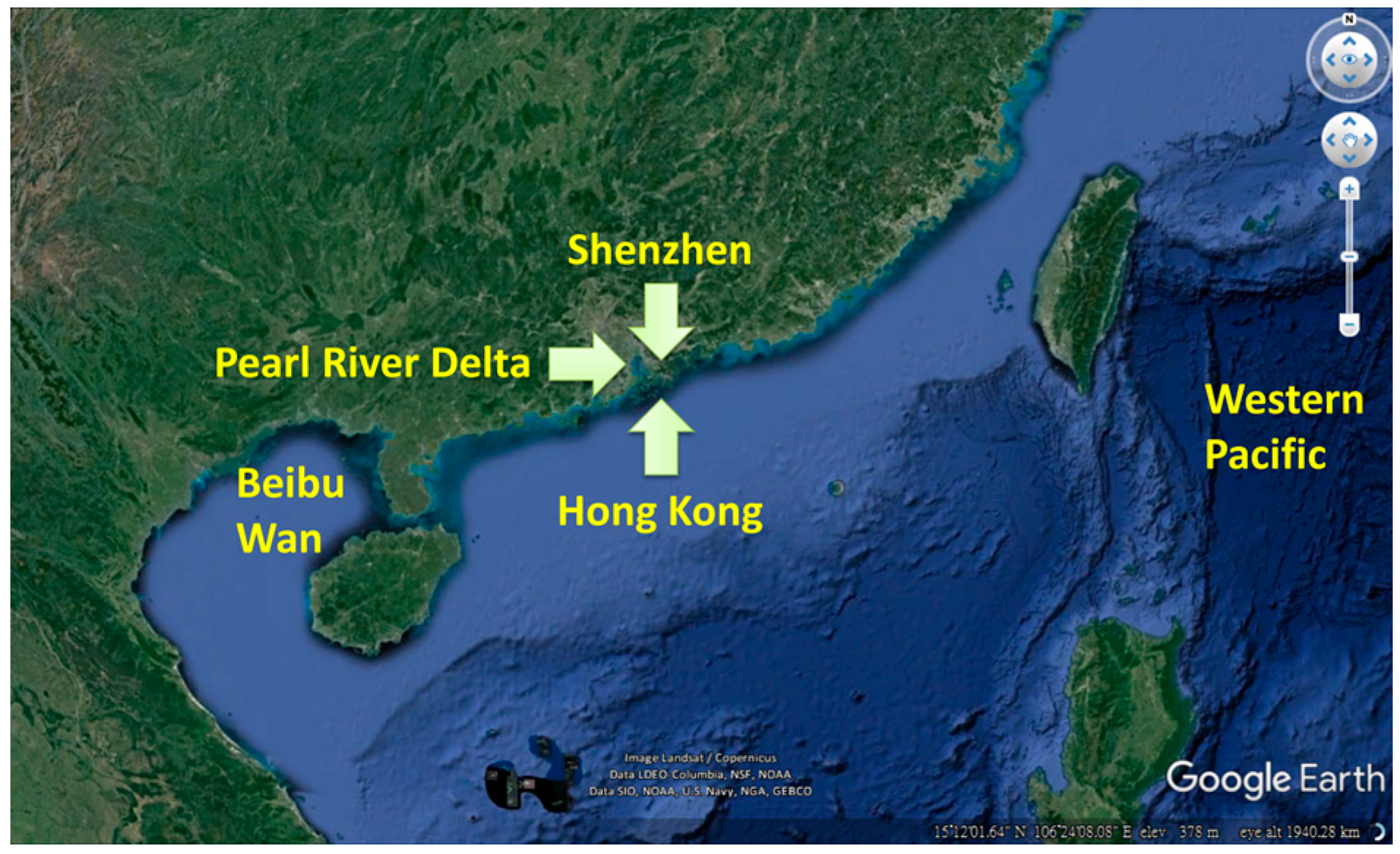
1.1. Background
1.2. Rainfall Nowcast
- a)
- Integrated Nowcasting through Comprehensive Analysis (INCA) by Zentralanstalt für Meteorologie und Geodynamik (ZAMG);
- b)
- Nimrod by Met Office, United Kingdom (UKMO);
- c)
- Spectral Prognosis (S-PROG) by (Australian) Bureau of Meteorology (BoM);
- d)
- Short-Term Ensemble Prediction System (STEPS) by UKMO/BoM;
- e)
- Auto Nowcasting System (ANC) by National Center for Atmospheric Research (NCAR);
- f)
- McGill Algorithm for Precipitation Nowcasting Using Semi-Lagrangian Extrapolation (MAPLE) by (Canadian) McGill University etc.
2. Operational Experiment Setup
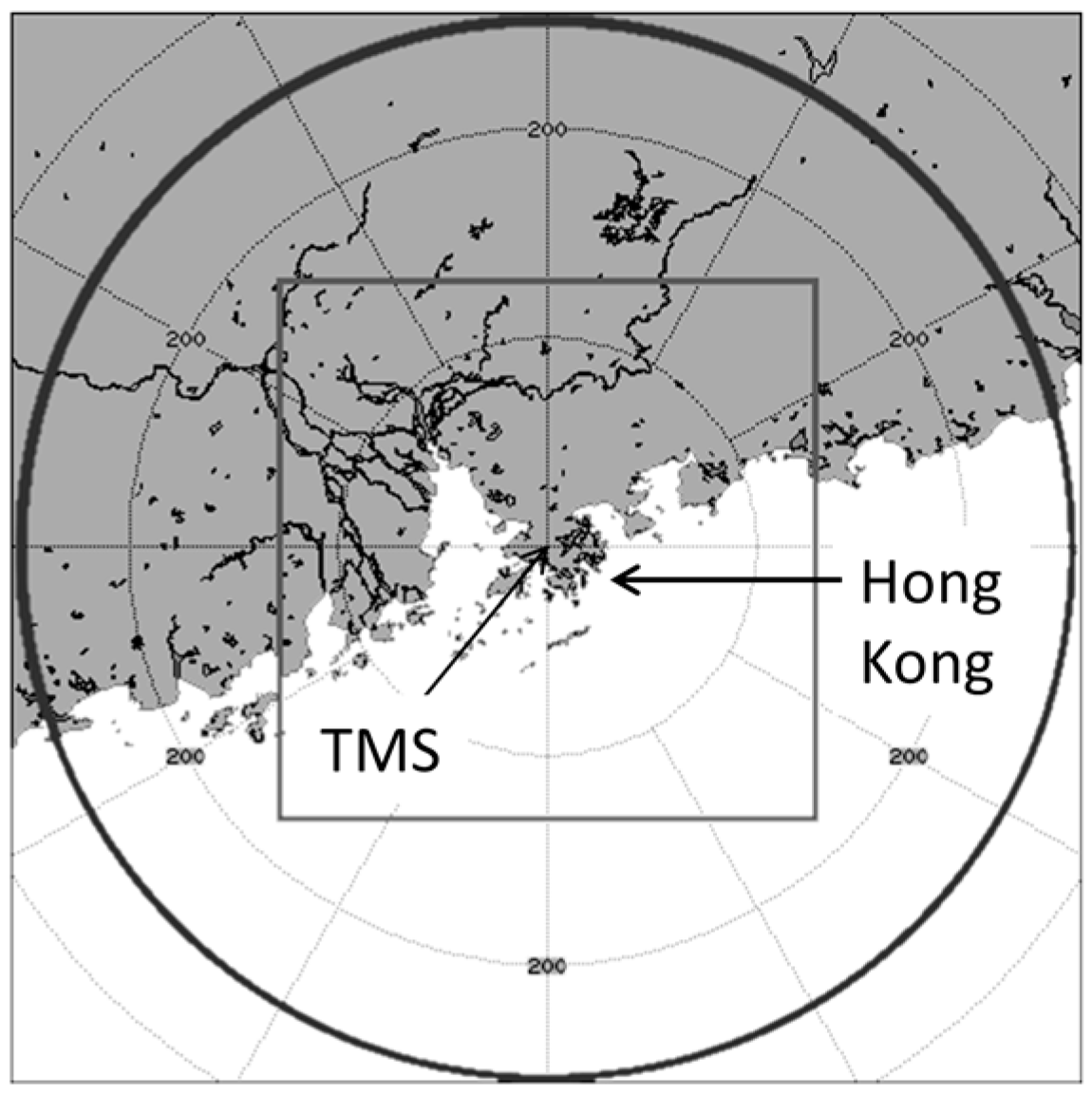
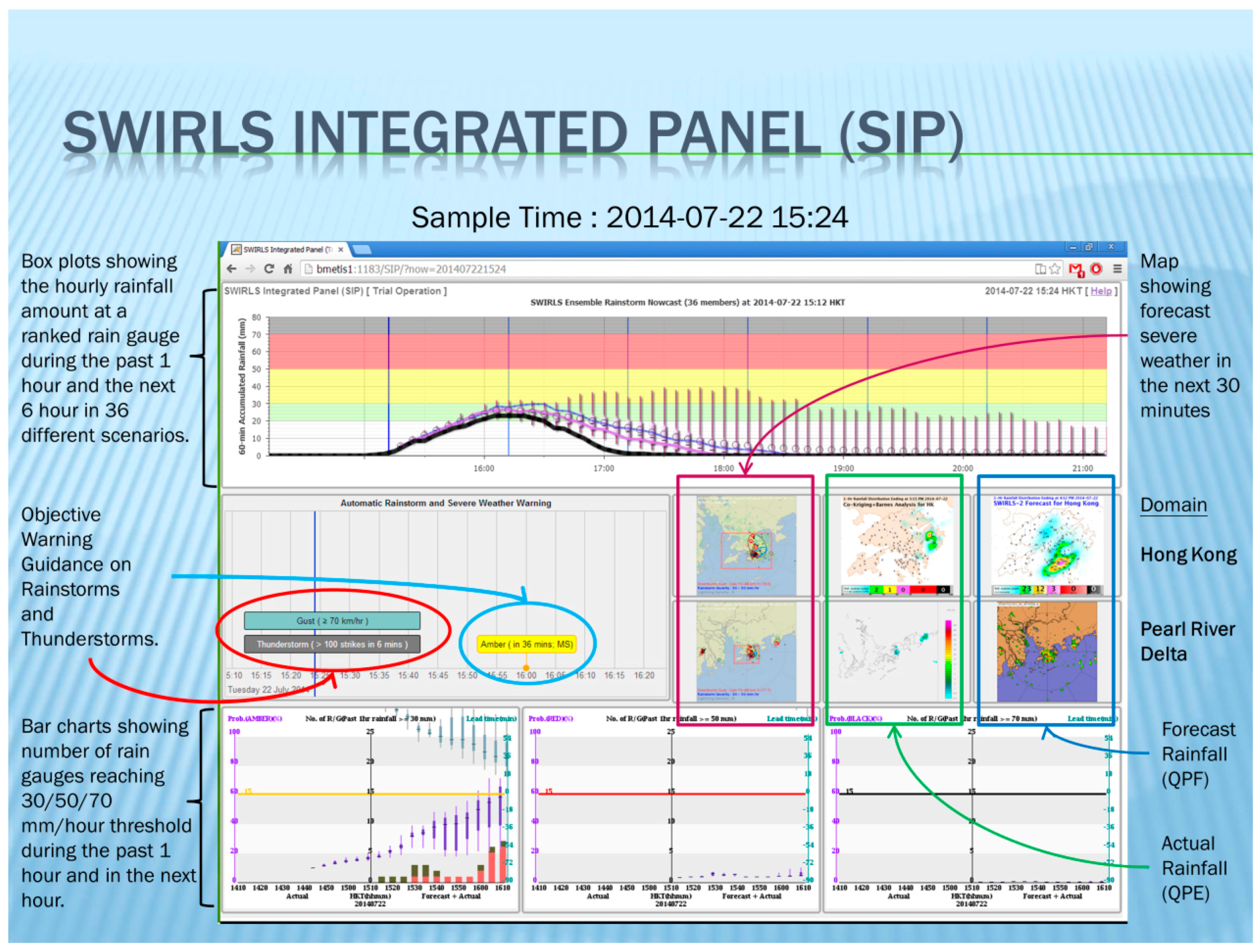
2.1. Nowcasting System
2.2. Radar Echo Tracking Algorithms
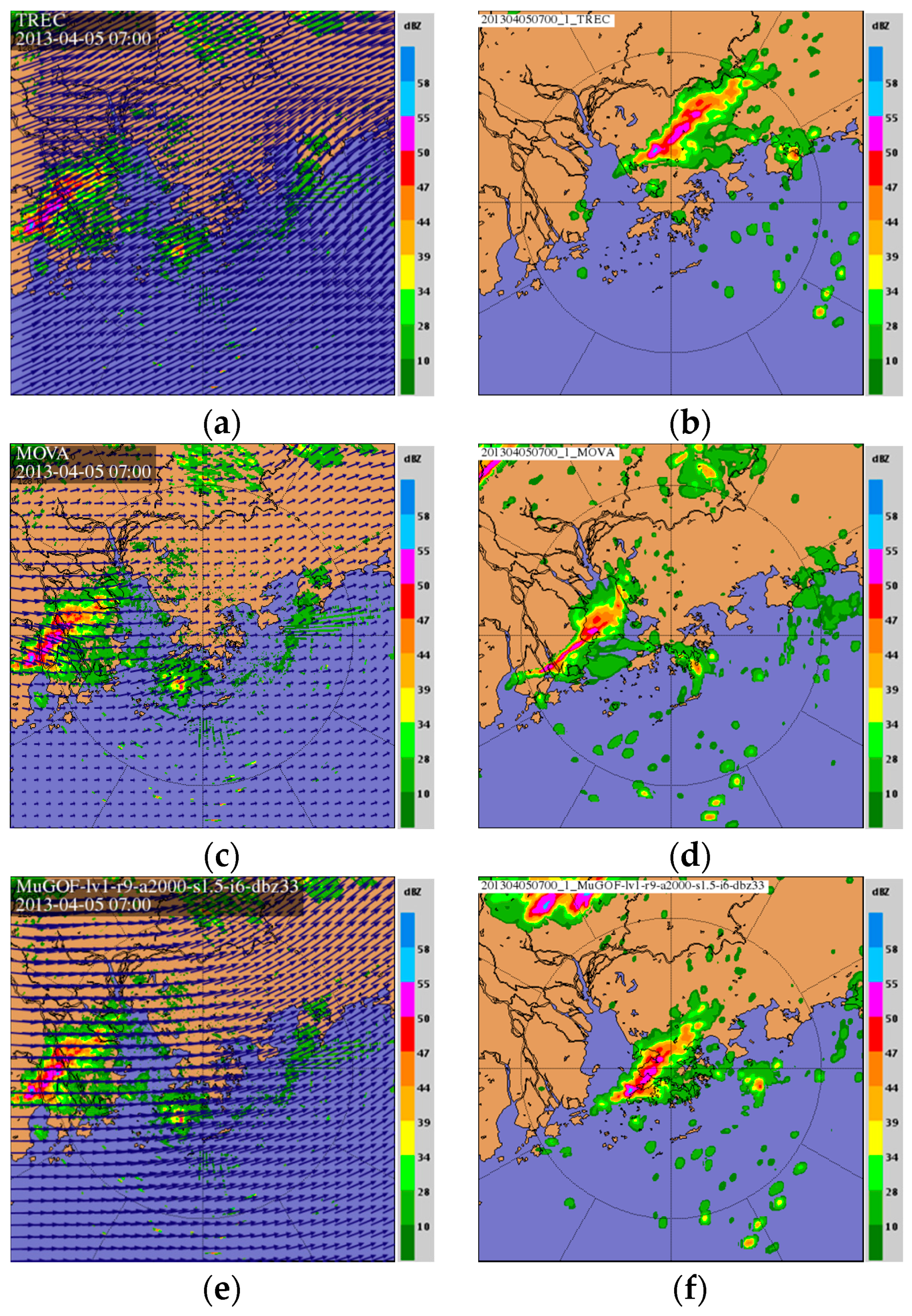
2.2.1. Tracking of Radar Echoes by Correlation (TREC)
2.2.2. Multi-Scale Optical-Flow by Variational Analysis (MOVA)
2.2.3. Real-Time Optical Flow by Variational Methods for Echoes of Radar (ROVER)
3. Results
3.1. Case Analyses
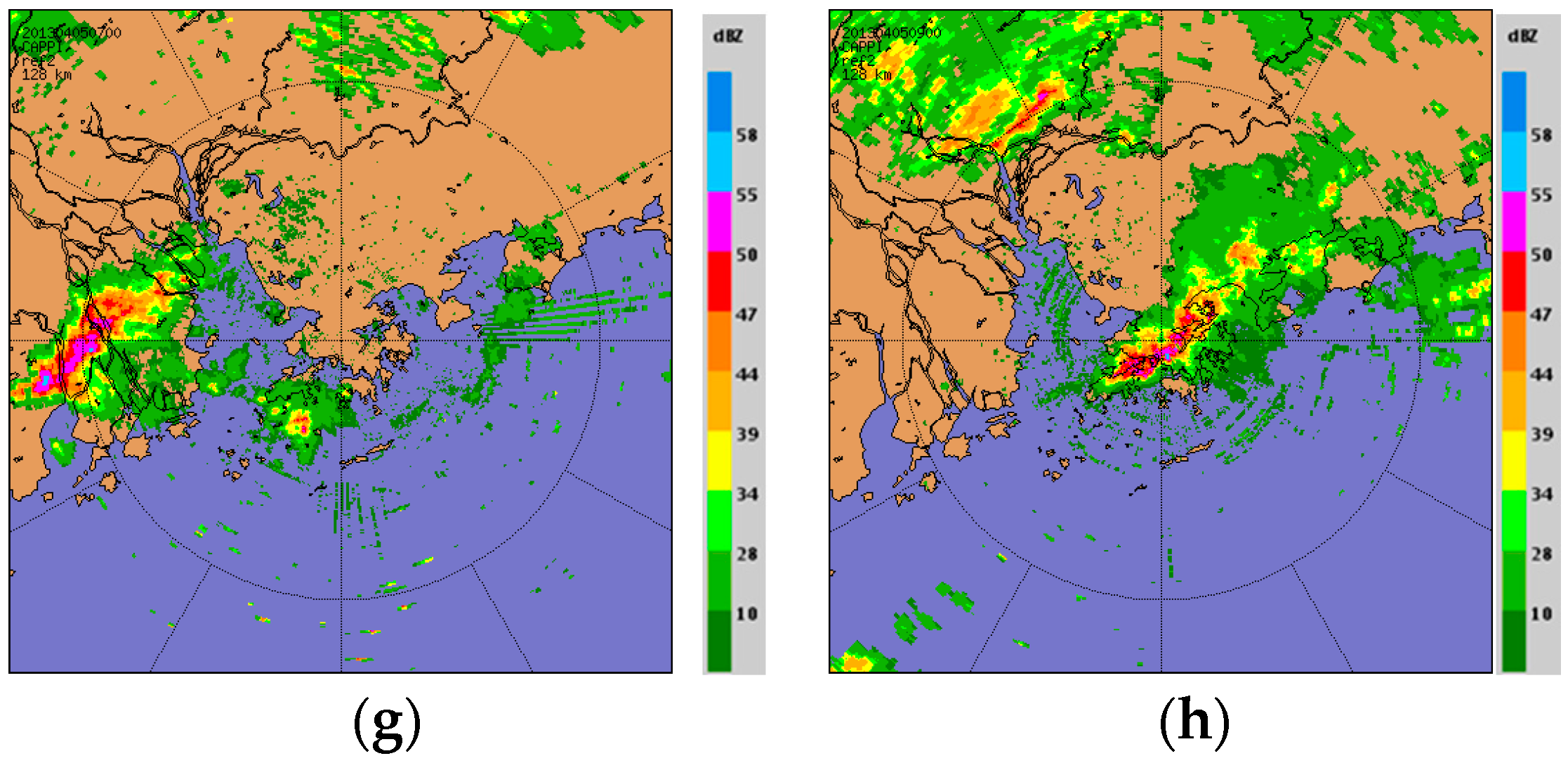
3.1.1. Rainstorm on 5 April 2013
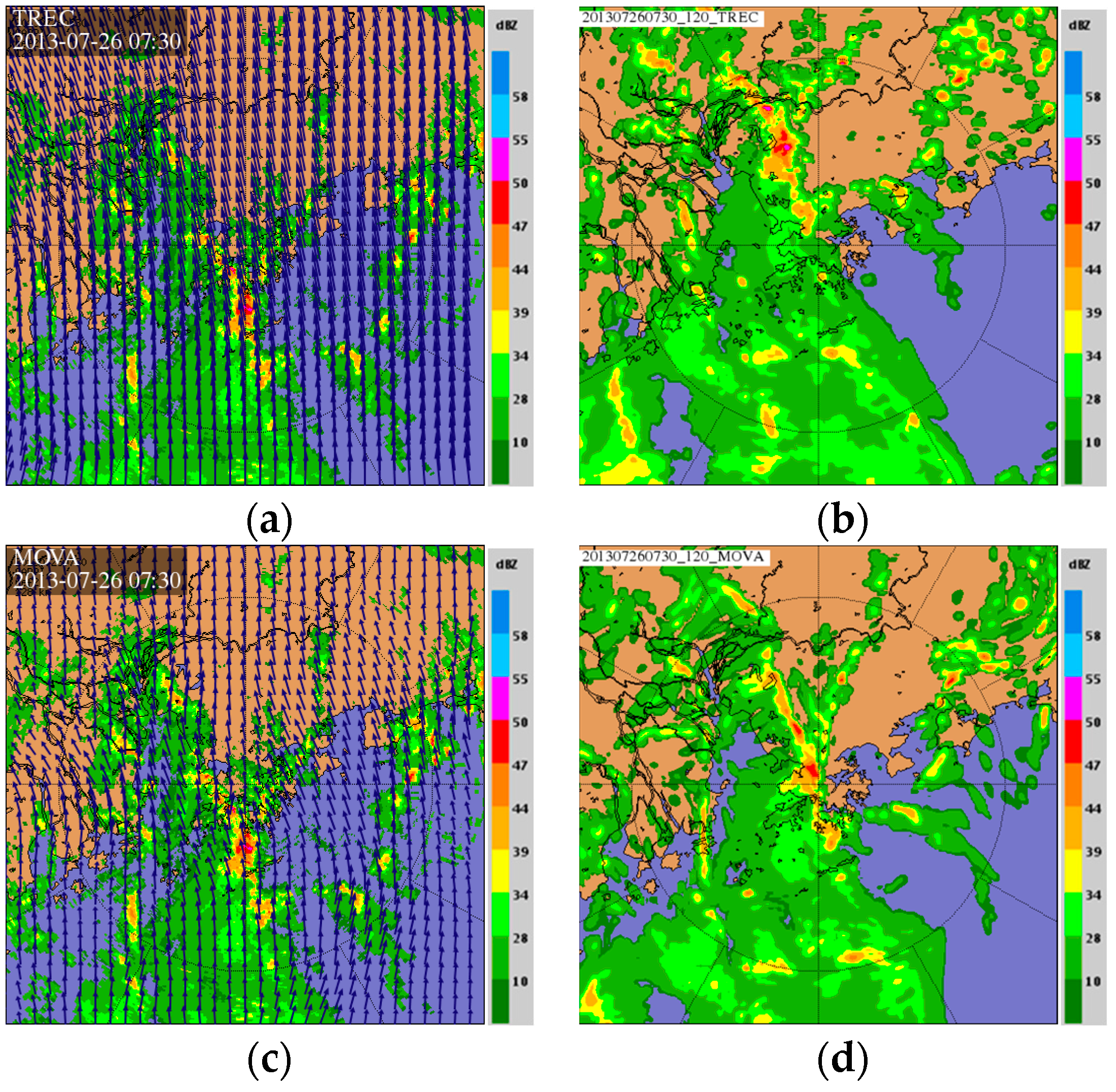
3.1.2. Rainstorm on 26 July 2013
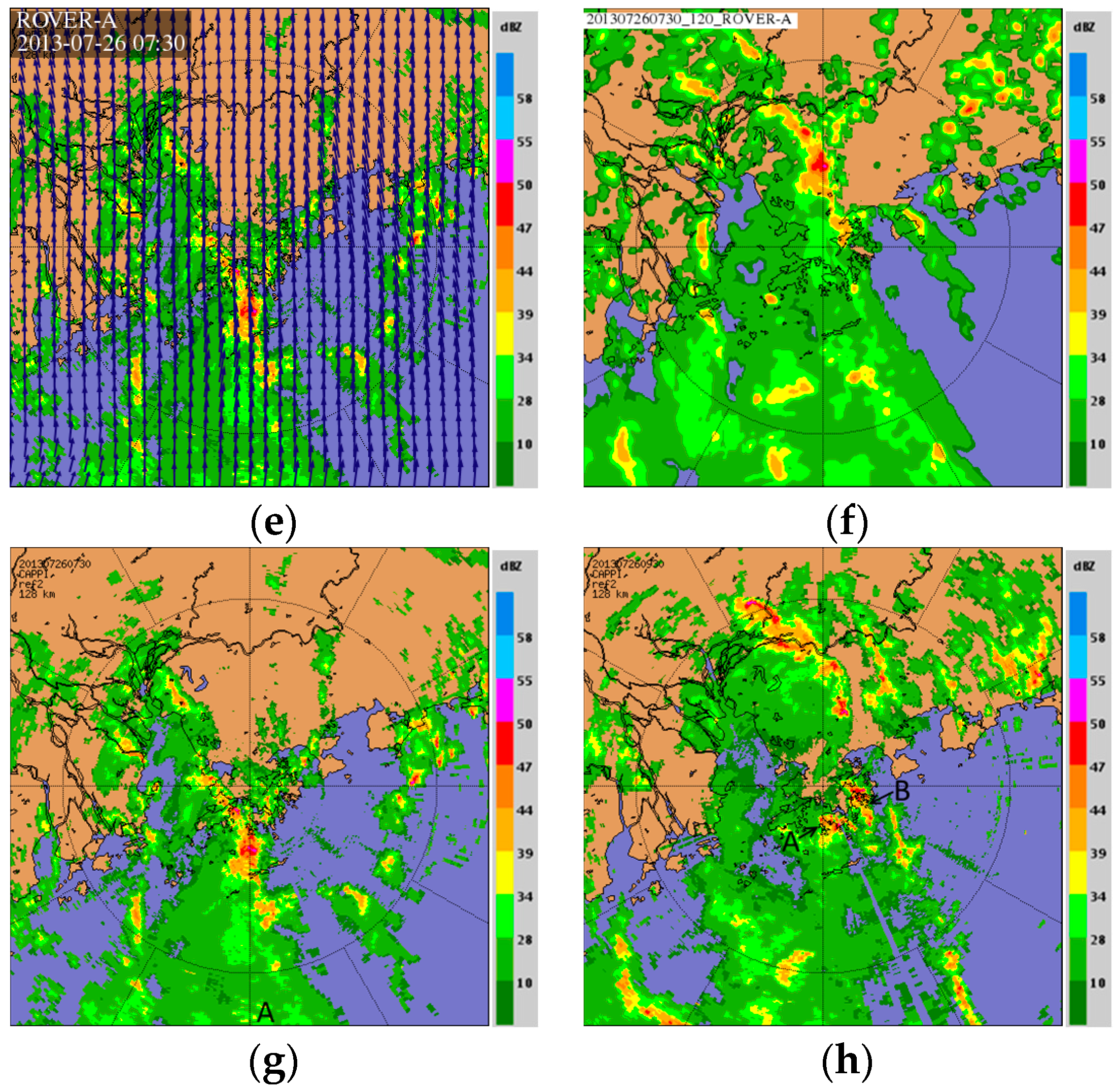
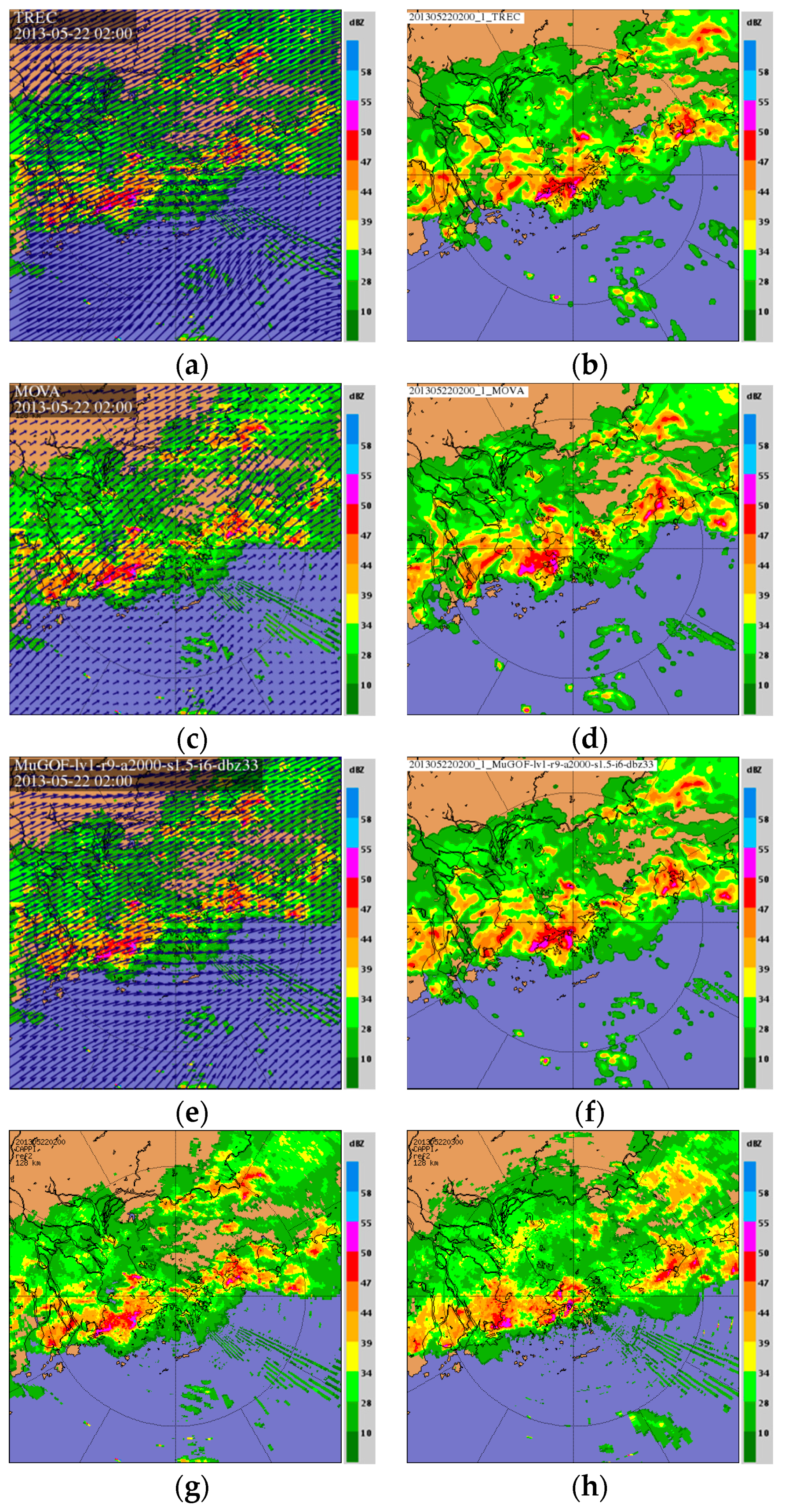
3.1.3. Rainstorm on 22 May 2013
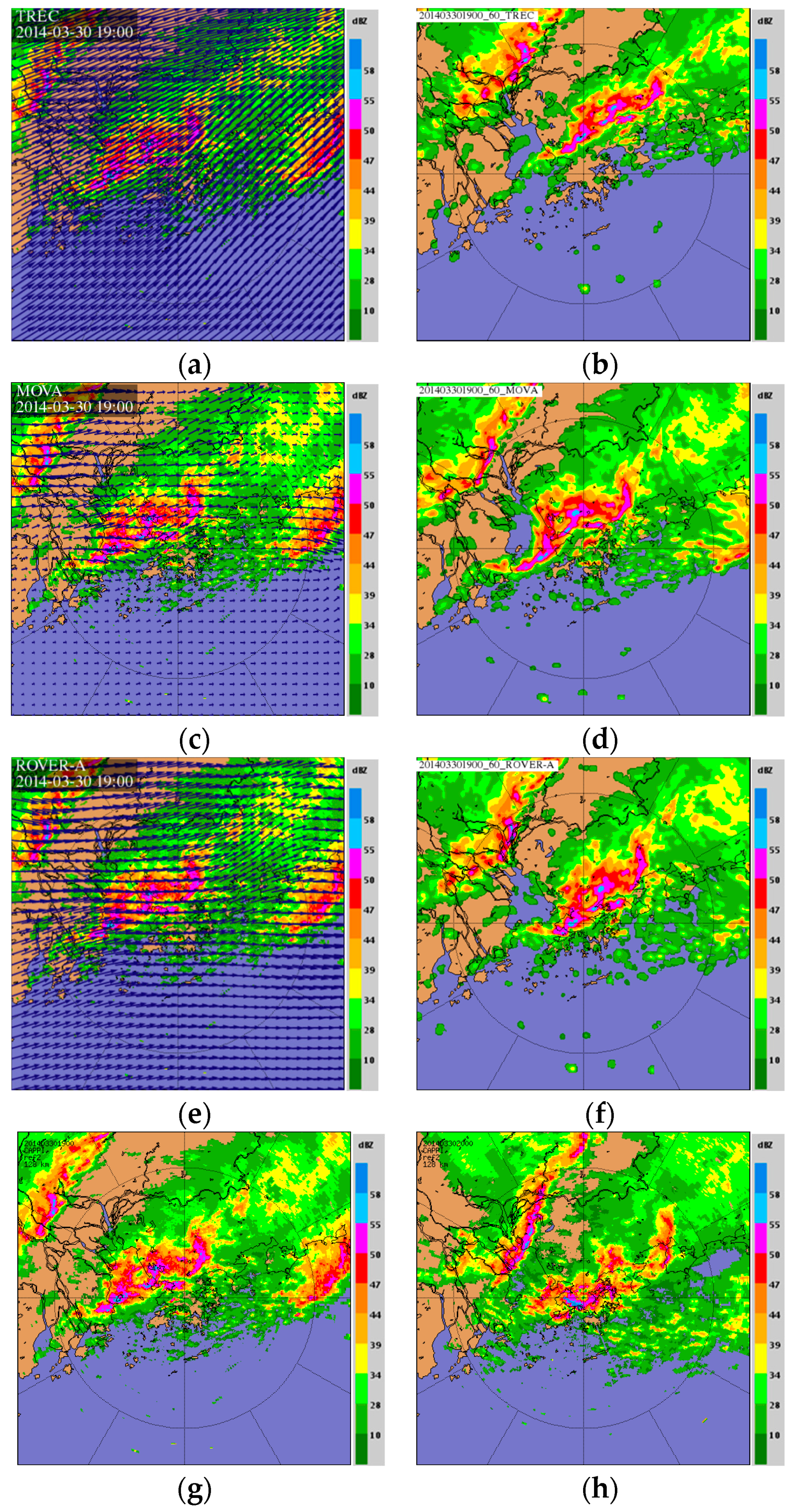
3.1.4. Rainstorm on 30 March 2014
3.2. Comparison of Tracking Algorithms
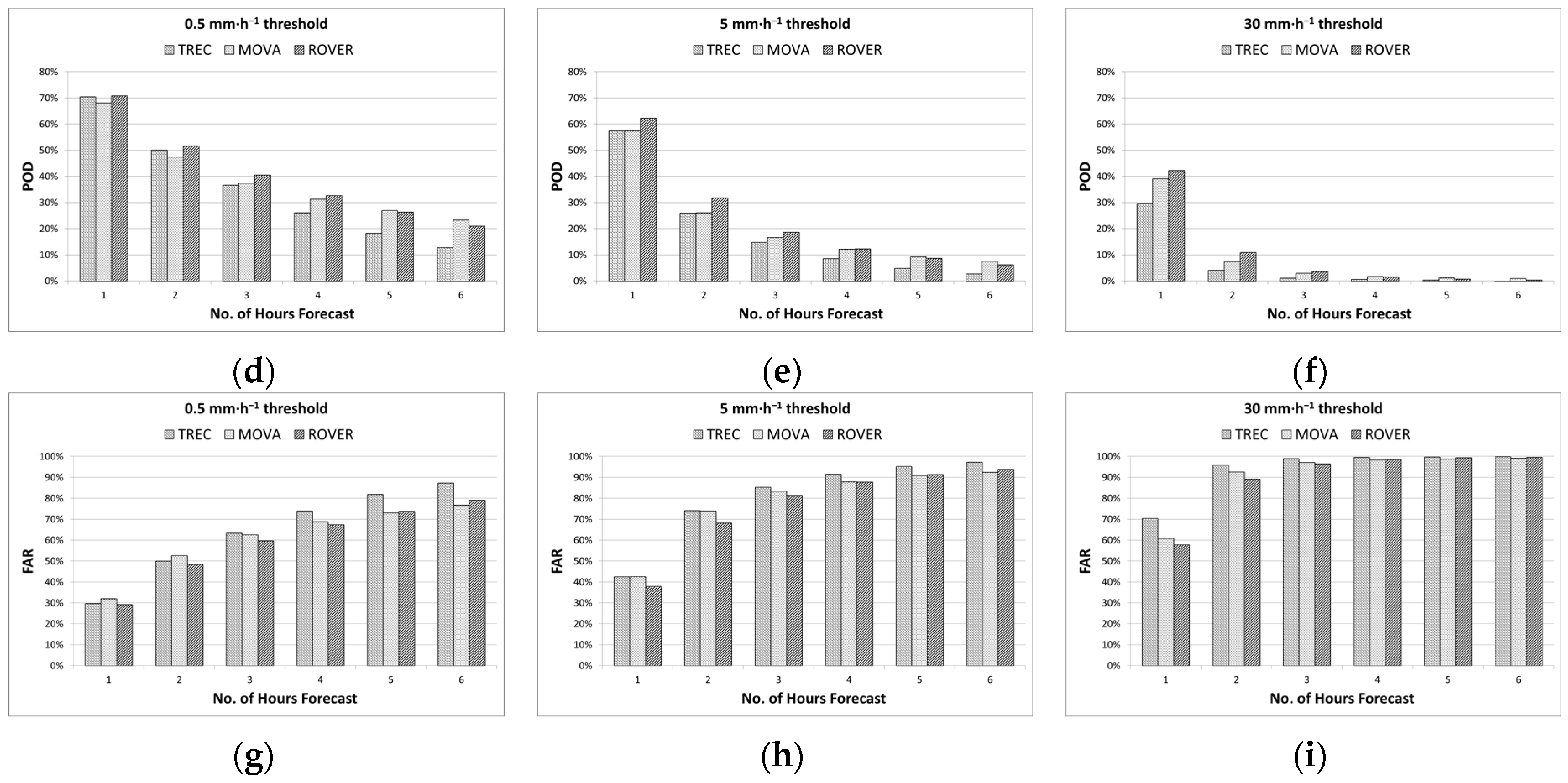
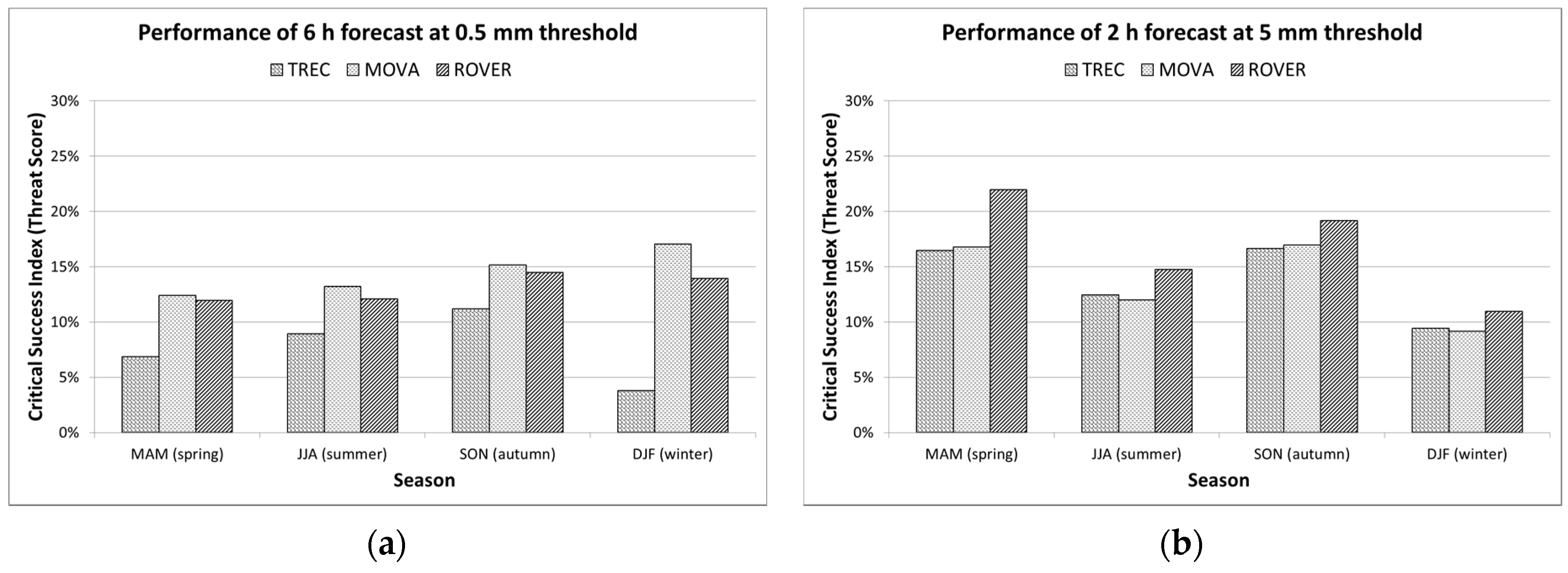
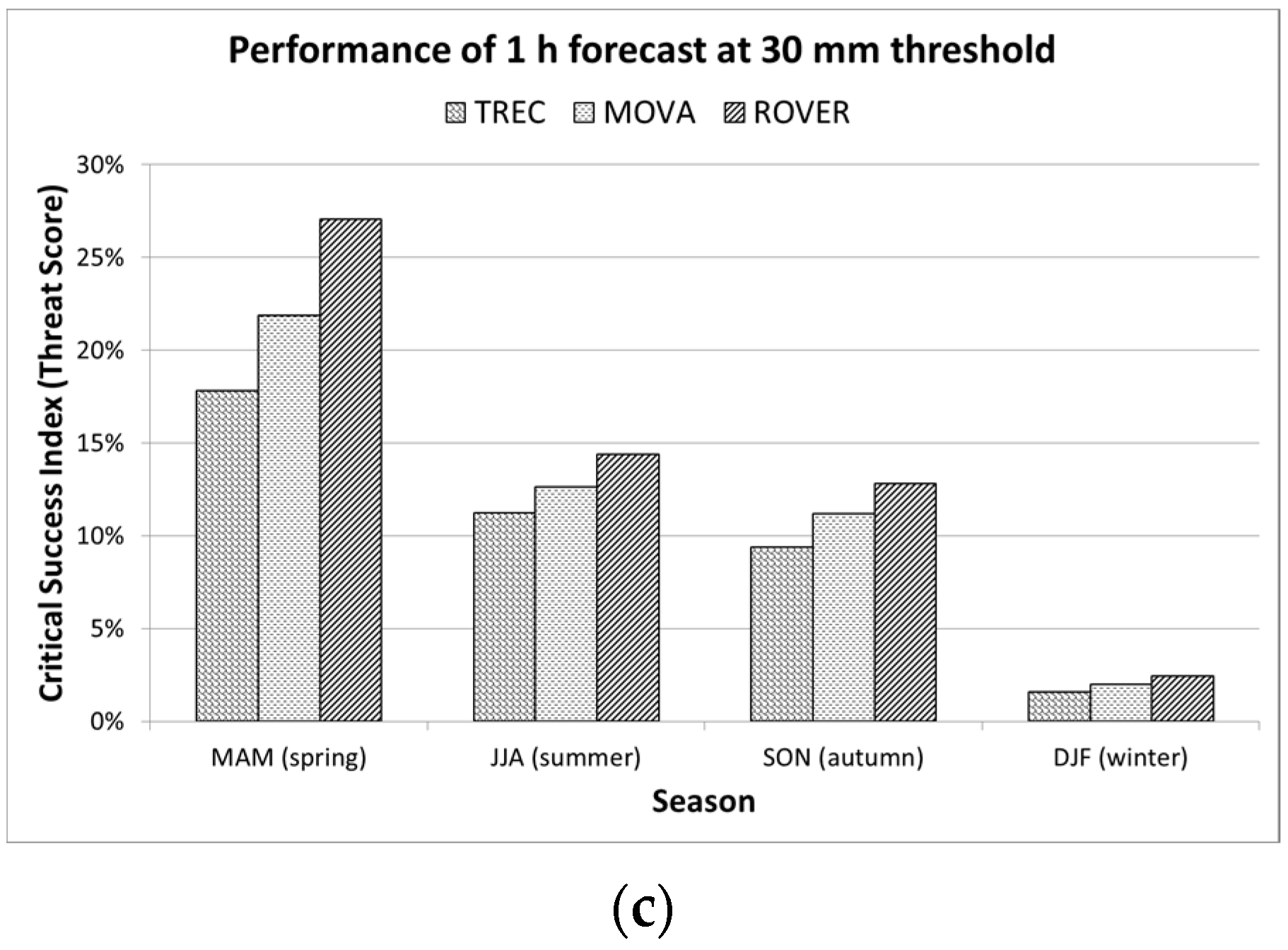
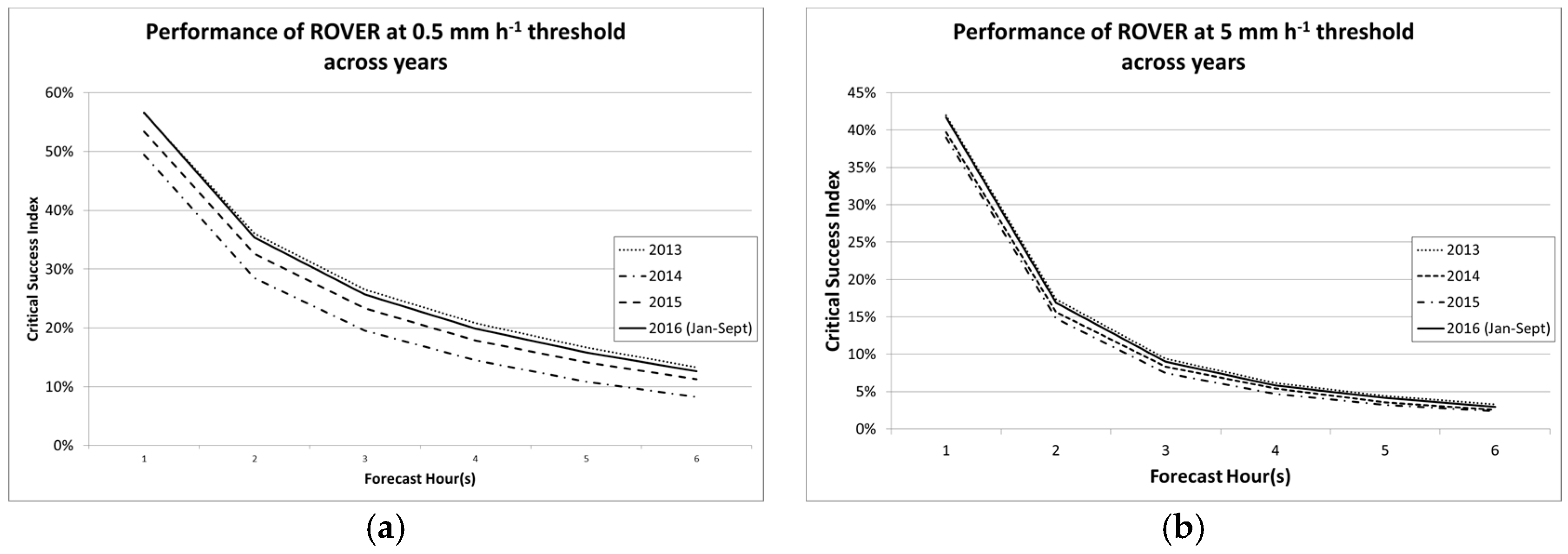
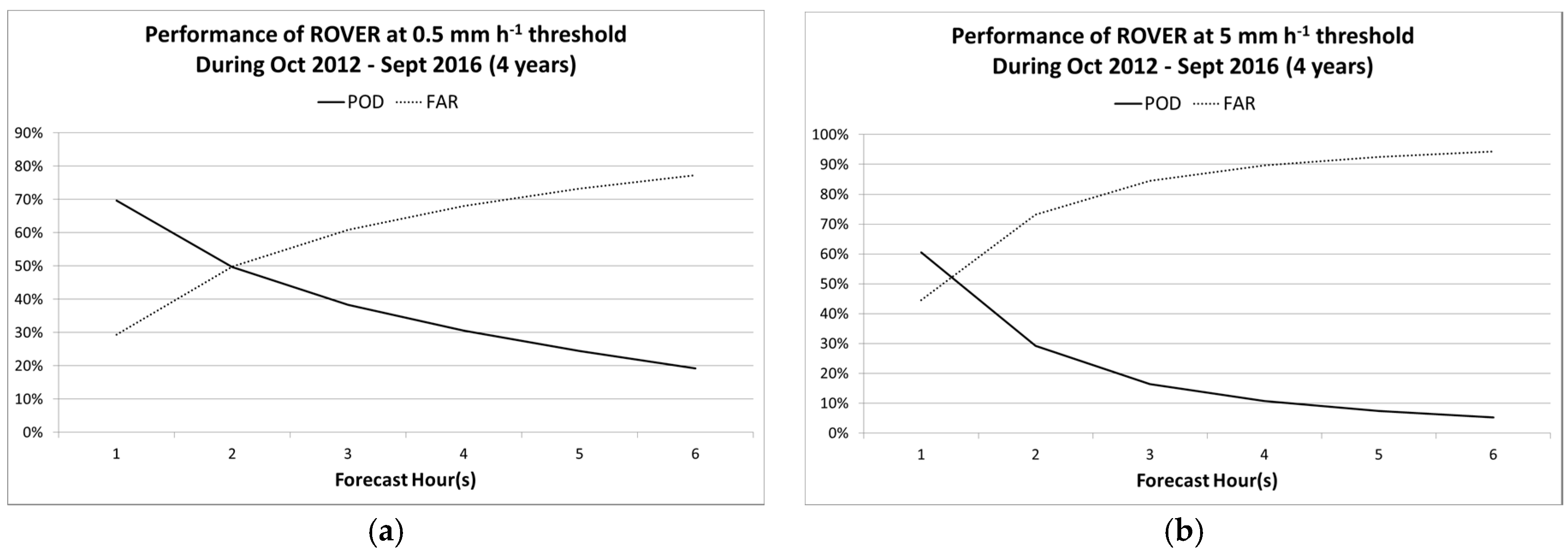
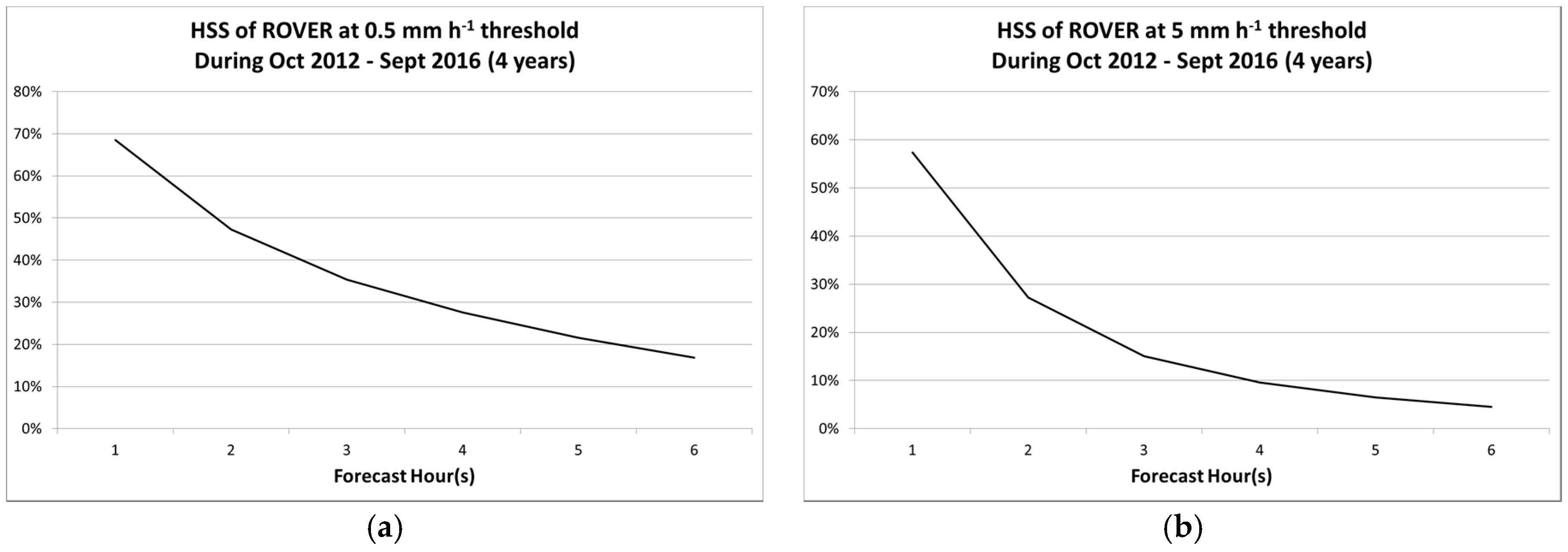
3.3. Operational Verification of ROVER
4. Discussion
4.1. Limitations
4.2. Developments in Progress
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Peterson, P. The Rainfall of Hong Kong. 1964. Available online: http://www.hko.gov.hk/publica/tn/tn017.pdf (accessed on 2 February 2017). [Google Scholar]
- Lee, T.C.; Leung, W.; Chan, K. Climatological Normals for Hong Kong, 1971–2000. Available online: http://www.weather.gov.hk/publica/tnl/tnl083.pdf (accessed on 2 February 2017).
- Yang, T.L.; Mackey, S.; Cumine, E. Final Report of the Commission of Inquiry into the Rainstorm Disasters 1972. GEO Report No. 229. Available online: http://www.cedd.gov.hk/eng/publications/geo_reports/doc/er229/er229links.pdf (accessed on 24 February 2017).
- Ho, P. Modernisation of the City. In Weather the Storm; Hong Kong University Press: Hong Kong, China, 2003; pp. 318–319. [Google Scholar]
- Hong Kong Observatory Rainstorm Warning System. Available online: http://www.hko.gov.hk/wservice/warning/rainstor.htm (accessed on 2 February 2017).
- Li, P.W.; Wong, W.K.; Cheung, P.; Yeung, H.Y. An overview of nowcasting development, applications, and services in the Hong Kong Observatory. J. Meteorol. Res. 2014, 28, 859–876. [Google Scholar] [CrossRef]
- Reyniers, M. Quantitative Precipitation Forecasts Based on Radar Observations: Principles, Algorithms and Operational Systems. Royal Meteorological Institute of Belgium. Available online: http://www.meteo.be/meteo/download/fr/3040165/pdf/rmi_scpub-1261.pdf (accessed on 2 February 2017).
- Keenan, T.; Wilson, J.; Joe, P.; Collier, C.G.; Golding, B.; Burgess, D.; Carbone, R.; Seed, A.; May, P.; Berry, L.; et al. The World Weather Research Programme (WWRP) Sydney 2000 Forecast Demonstration Project: Overview. In Proceedings of the 30th International Conference on Radar Meteorology, Munich, Germany, 19–24 July 2001.
- Keenan, T.; Joe, P.; Wilson, J.; Collier, C.; Golding, B.; Burgess, D.; May, P.; Pierce, C.; Bally, J.; Crook, A.; et al. The Sydney 2000 World Weather Research Programme Forecast Demonstration Project: Overview and Current Status. Bull. Am. Meteorol. Soc. 2003, 84, 1041–1054. [Google Scholar] [CrossRef]
- Ebert, E.E.; Wilson, L.J.; Brown, B.G.; Nurmi, P.; Brooks, H.E.; Bally, J.; Jaeneke, M. Verification of Nowcasts from the WWRP Sydney 2000 Forecast Demonstration Project. Weather Forecast. 2004, 19, 73–96. [Google Scholar] [CrossRef]
- Wang, J.; Keenan, T.; Joe, P.; Wilson, J.; Lai, E.S.T.; Liang, F.; Wang, Y.; Ebert, B.; Ye, Q.; Bally, J.; et al. Overview of the Beijing 2008 Olympics Project. Part I: Forecast Demonstration Project. Available online: https://www.wmo.int/pages/prog/arep/wwrp/new/documents/B08FDP_finalreport.pdf (accessed on 2 February 2017).
- Peura, M.; Hohti, H. Optical Flow in Radar Images. Available online: http://copernicus.org/erad/2004/online/ERAD04_P_454.pdf (accessed on 9 February 2017).
- Bowler, N.E.H.; Pierce, C.E.; Seed, A. Development of a precipitation nowcasting algorithm based upon optical flow techniques. J. Hydrol. 2004, 288, 74–91. [Google Scholar] [CrossRef]
- Yeung, H.Y.; Man, C.; Chan, S.T.; Seed, A. Application of Radar-Raingauge Co-Kriging to Improve QPE and Quality Control of Real-time Rainfall Data. Available online: http://www.hko.gov.hk/publica/reprint/r968.pdf (accessed on 6 February 2017).
- Li, P.W.; Lai, E.S.T. Short-range quantitative precipitation forecasting in Hong Kong. J. Hydrol. 2004, 288, 189–209. [Google Scholar] [CrossRef]
- Li, P.W.; Wong, W.K.; Chan, K.Y.; Lai, E.S.T. SWIRLS—An Evolving Nowcasting System. Hong Kong Observatory. Available online: http://www.weather.gov.hk/publica/tn/tn100.pdf (accessed on 6 February 2017).
- User Guide of IRIS Radar. Vaisala Oyj. 2016. Available online: ftp://ftp.sigmet.com/outgoing/manuals/IRIS_Radar_Manual.pdf (accessed on 9 February 2017).
- Cheung, P.; Wong, M.; Yeung, H. Application of Rainstorm Nowcast to Real-Time Warning of Landslide Hazards in Hong Kong. Available online: http://www.hko.gov.hk/publica/reprint/r673.pdf (accessed on 2 February 2017).
- Yeung, H.Y.; Lai, E.; Chiu, S. Lightning Initiation and Intensity Nowcasting Based on Isothermal Radar Reflectivity-A Conceptual Model. In Proceedings of the 33rd International Conference on Radar Meteorology, Cairns, Australia, 6–10 August 2007.
- Yeung, H.Y.; Lai, S.T.; Chan, K.Y. Thunderstorm Downburst and Radar-Based Nowcasting of Squalls. In Proceedings of the Fifth European Conference on Radar in Meteorology and Hydrology, Helsinki, Finland, 30 June–4 July 2008.
- Two-Hour Rainfall Nowcast for Hong Kong and Pearl River Delta. Available online: http://www.hko.gov.hk/nowcast/prd/api/index_ue.htm (accessed on 2 February 2017).
- Yeung, H.Y. Recent developments and applications of the SWIRLS nowcasting system in Hong Kong. In Proceedings of the 3rd WMO International Symposium on Nowcasting and Very Short-Range Forecasting (WSN12), Rio de Janeiro, Brazil, 6–10 August 2012.
- Woo, W.C. Location-Based Rainfall Nowcasting Service for Public. In Proceedings of the 2013 European Geosciences Union General Assembly, Vienna, Austria, 7–12 April 2013.
- Woo, W.C. Rain forecast on MyObservatory—A location-based rainfall nowcasting service for the public. In Proceedings of the 14th Workshop on Meteorological Operational Systems, ECMWF, Reading, UK, 18–20 November 2013.
- Yeung, H.Y.; Wong, W.K.; Chan, K.Y.; Lai, E. Applications of the Hong Kong Observatory nowcasting system SWIRLS-2 in support of the 2008 Beijing Olympic Games. In Proceedings of the WMO Symposium on Nowcasting, Whistler, BC, Canada, 30 August–4 September 2009.
- Cheng, T.L.; Tai, K.; Yeung, H.Y. Application of the nowcasting system SWIRLS in 2010 Shanghai Expo. In Proceedings of the 28th Annual Conference of Chinese Meteorological Society 2011, Xiamen, China, 2–4 November 2011.
- Srivastava, K.; Lau, S.; Yeung, H.Y.; Cheng, T.L.; Hardwaj, R.; Kannan, A.; Bhowmik, S.; Singh, H. Use of SWIRLS nowcasting system for quantitative precipitation forecast using Indian DWR data. MAUSAM Q. J. Meteorol. Hydrol. Geophys. 2012, 1, 1–16. [Google Scholar]
- Tuttle, J.D.; Foote, G.B. Determination of the Boundary Layer Airflow from a Single Doppler Radar. J. Atmos. Ocean. Technol. 1990, 7, 218–232. [Google Scholar] [CrossRef]
- Cressman, G.P. An operational objective analysis system. Mon. Weather Rev. 1959, 367–374. [Google Scholar] [CrossRef]
- Novak, P. The Czech Hydrometeorological Institute’s severe storm nowcasting system. Atmos. Res. 2007, 83, 450–457. [Google Scholar] [CrossRef]
- Wang, G.L.; Wong, W.K.; Liu, L.P.; Wang, H. Application of multi-scale tracking radar echoes scheme in quantitative precipitation nowcasting. Adv. Atmos. Sci. 2013, 30, 448–460. [Google Scholar] [CrossRef]
- Wong, W.K.; Yeung, H.Y.; Wang, Y.C.; Chen, M. Towards the Blending of NWP with Nowcast—Operation Experience in B08FDP. In Proceedings of the WMO Symposium on Nowcasting, Whistler, BC, Canada, 30 August–4 September 2009.
- Horn, B.K.P.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef]
- Germann, U.; Zawadzki, I. Scale-Dependence of the Predictability of Precipitation from Continental Radar Images. Part I: Description of the Methodology. Mon. Weather Rev. 2002, 130, 2859–2873. [Google Scholar] [CrossRef]
- Wahba, G.; Wendelberger, J. Some New Mathematical Methods for Variational Objective Analysis Using Splines and Cross Validation. Mon. Weather Rev. 1980, 108, 1122–1143. [Google Scholar] [CrossRef]
- Bellon, A.; Zawadzki, I.; Kilambi, A.; Lee, H.C.; Lee, Y.H.; Lee, G. McGill algorithm for precipitation nowcasting by lagrangian extrapolation (MAPLE) applied to the South Korean radar network. Part I: Sensitivity studies of the Variational Echo Tracking (VET) technique. Asia-Pac. J. Atmos. Sci. 2010, 46, 369. [Google Scholar] [CrossRef]
- Cheung, P.; Yeung, H.Y. Application of optical-flow technique to significant convection nowcast for terminal areas in Hong Kong. In Proceedings of the 3rd WMO International Symposium on Nowcasting and Very Short-Range Forecasting (WSN12), Rio de Janeiro, Brazil, 6–10 August 2012.
- Bruhn, A.; Weickert, J.; Feddern, C.; Kohlberger, T.; Schnörr, C. Real-Time Optic Flow Computation with Variational Methods. In Computer Analysis of Images and Patterns; Lecture Notes in Computer Science; Petkov, N., Westenberg, M.A., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 222–229. [Google Scholar]
- Bruhn, A.; Weickert, J.; Feddern, C.; Kohlberger, T.; Schnorr, C. Variational optical flow computation in real time. IEEE Trans. Image Process. 2005, 14, 608–615. [Google Scholar] [CrossRef] [PubMed]
- Lucas, B.D.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision. In Proceedings of the 7th International Joint Conference on Artificial Intelligence—Volume 2; IJCAI’81; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1981; pp. 674–679. [Google Scholar]
- Harmat, A. Variational Optical Flow. Available online: http://sourceforge.net/projects/varflow/ (accessed on 2 February 2017).
- Woo, W.C. Enhancement of optical flow technique for Nowcasting of springtime squall lines over Hong Kong. In Proceedings of the Fifth International Workshop on Monsoons, Macao, China, 28 October–1 November 2013.
- Doswell, C.A.; Davies-Jones, R.; Keller, D.L. On Summary Measures of Skill in Rare Event Forecasting Based on Contingency Tables. Weather Forecast. 1990, 5, 576–585. [Google Scholar] [CrossRef]
- Woo, W.C.; Li, K.K.; Bala, M. An Algorithm to Enhance Nowcast of Rainfall Brought by Tropical Cyclones through Separation of Motions. Trop. Cyclone Res. Rev. 2014, 3, 111–121. [Google Scholar]
- Bowler, N.E.; Pierce, C.E.; Seed, A.W. STEPS: A probabilistic precipitation forecasting scheme which merges an extrapolation nowcast with downscaled NWP. Q. J. R. Meteorol. Soc. 2006, 132, 2127–2155. [Google Scholar] [CrossRef]
- Liguori, S.; Rico-Ramirez, M.A. Quantitative assessment of short-term rainfall forecasts from radar nowcasts and MM5 forecasts. Hydrol. Process. 2012, 26, 3842–3857. [Google Scholar] [CrossRef]
- Schellart, A.; Liguori, S.; Krämer, S.; Saul, A.; Rico-Ramirez, M.A. Comparing quantitative precipitation forecast methods for prediction of sewer flows in a small urban area. Hydrol. Sci. J. 2014, 59, 1418–1436. [Google Scholar] [CrossRef]
- Lee, S.; Han, H.; Im, J.; Jang, E.; Lee, M.-I. Detection of deterministic and probabilistic convective initiation using Himawari-8 Advanced Himawari Imager data. Atmos. Meas. Tech. Discuss. 2016, 1–38. [Google Scholar] [CrossRef]
- Han, L.; Sun, J.; Zhang, W.; Xiu, Y.; Feng, H.; Lin, Y. A Machine Learning Nowcasting Method based on Real-time Reanalysis Data. arXiv, 2016; arXiv:1609.04103. [Google Scholar]
- Woo, W.C.; Lok, K.M. Experimental Location Specific Probabilistic Rainfall Nowcast. In Proceedings of the 29th Guangdong-Hong Kong-Macao Seminar on Meteorological Science and Technology, Macao, China, 20–22 January 2015.
- Woo, W.C.; Lok, K.M.; Wong, W.K. Probabilistic Quantitative Precipitation Forecast for Tropical Cyclone Rainfall. In Proceedings of the Third International Workshop on Tropical Cyclone Landfall Processes (IWTCLP-III), Jeju, Korea, 2–10 December 2014.
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.-Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. arXiv, 2015; arXiv:1506.04214. [Google Scholar]
- Woo, W.C.; Wong, W.K. Progressive Verification of Rainstorm Warnings. In Proceedings of the WMO WWRP 4th International Symposium on Nowcasting and Very-short-range Forecast 2016 (WSN16), Hong Kong, China, 25–29 July 2016.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Boxes | 1 | 5 | 10 | 20 | 40 | 80 | 160 |
|---|---|---|---|---|---|---|---|
| Box Size (km) | 256 | 51.2 | 25.6 | 12.8 | 6.4 | 3.2 | 1.6 |
| Smoothing constant γ | 0.0005 | 0.01 | 0.1 | 0.1 | 1 | 50 | 100 |
| Parameter | Significance | Value in ROVER |
|---|---|---|
| σ | Gaussian convolution for image smoothing | 9 |
| ρ | Gaussian convolution for local vector field smoothing | 1.5 |
| α | Regularization parameters in the energy function | 2000 |
| Lf | The finest spatial scale | 1 pixel |
| Lc | The coarsest spatial scale | 7 pixels |
| Tr | The time interval for tracking radar echoes | 6 min |
| Forecast | Observation | |
|---|---|---|
| Yes | No | |
| Yes | Hit | False alarm |
| No | Miss | Correct negative |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Woo, W.-c.; Wong, W.-k. Operational Application of Optical Flow Techniques to Radar-Based Rainfall Nowcasting. Atmosphere 2017, 8, 48. https://doi.org/10.3390/atmos8030048
Woo W-c, Wong W-k. Operational Application of Optical Flow Techniques to Radar-Based Rainfall Nowcasting. Atmosphere. 2017; 8(3):48. https://doi.org/10.3390/atmos8030048
Chicago/Turabian StyleWoo, Wang-chun, and Wai-kin Wong. 2017. "Operational Application of Optical Flow Techniques to Radar-Based Rainfall Nowcasting" Atmosphere 8, no. 3: 48. https://doi.org/10.3390/atmos8030048
APA StyleWoo, W. -c., & Wong, W. -k. (2017). Operational Application of Optical Flow Techniques to Radar-Based Rainfall Nowcasting. Atmosphere, 8(3), 48. https://doi.org/10.3390/atmos8030048