Cloud Area Distributions of Shallow Cumuli: A New Method for Ground-Based Images

 , and
, and
Abstract
:1. Introduction
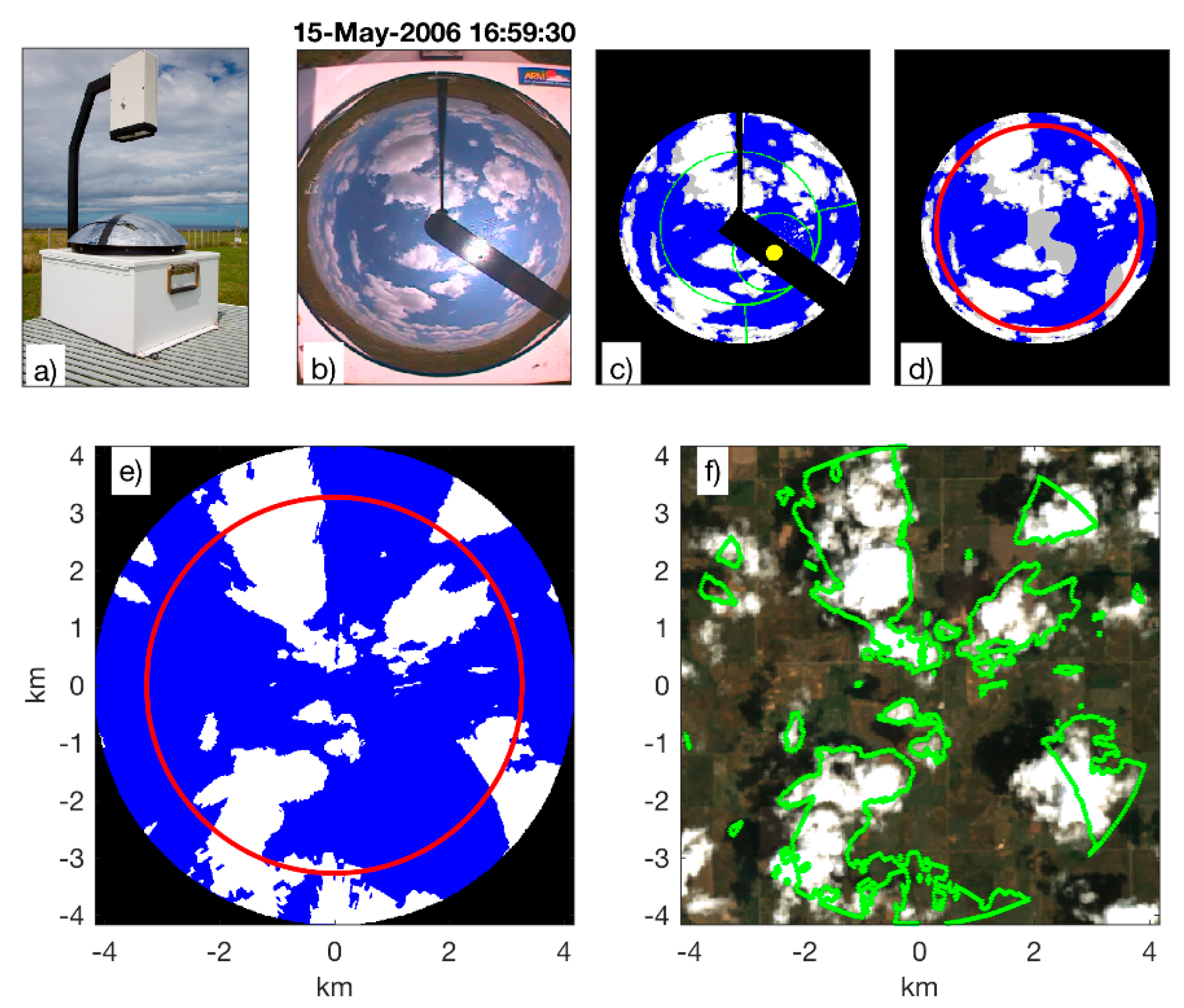
2. Approach
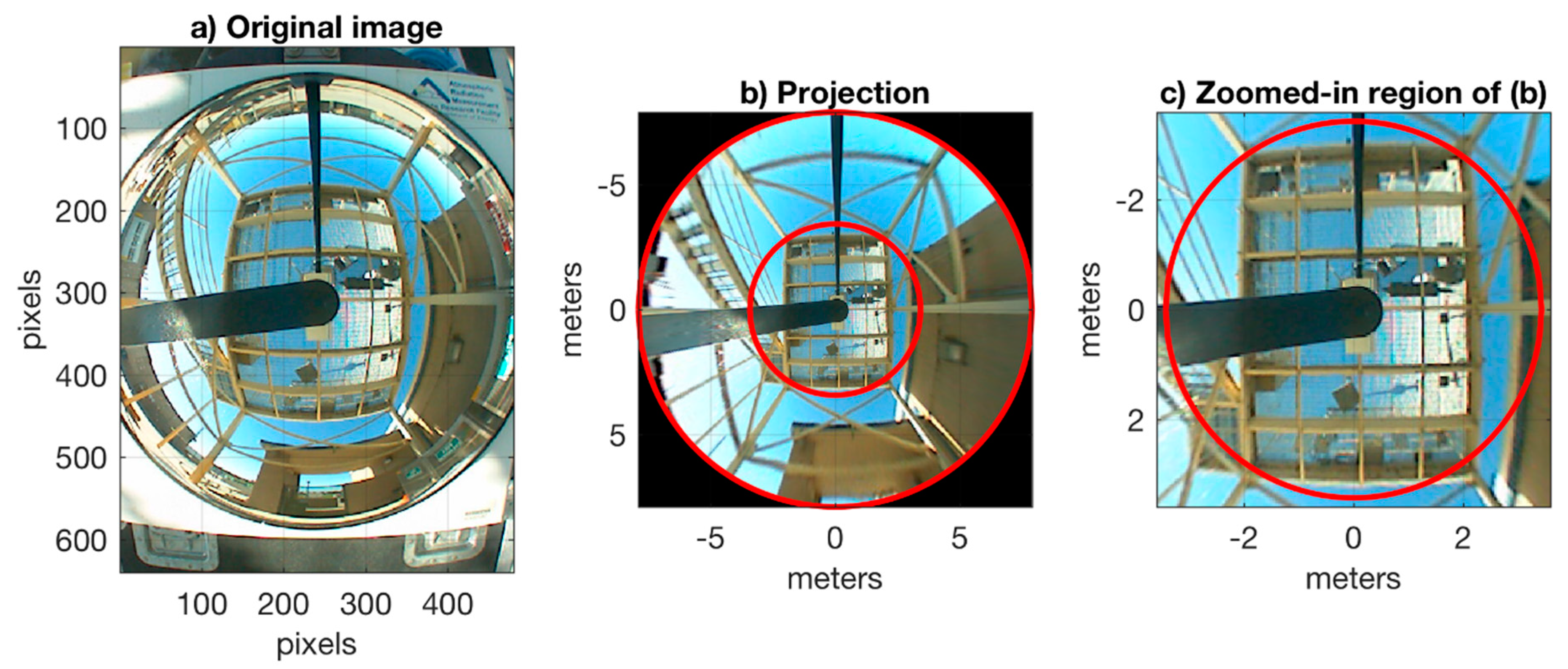
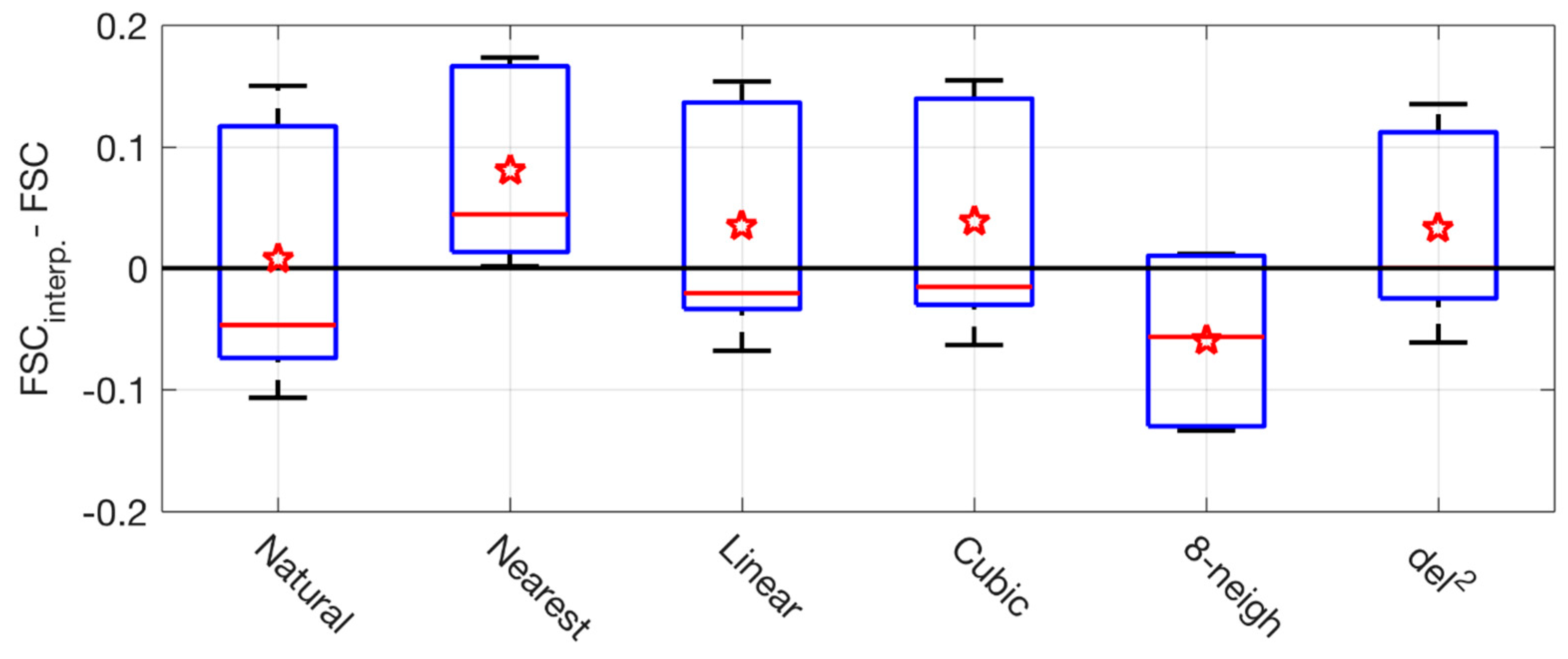
2.1. Interpolation over Image Obstructions
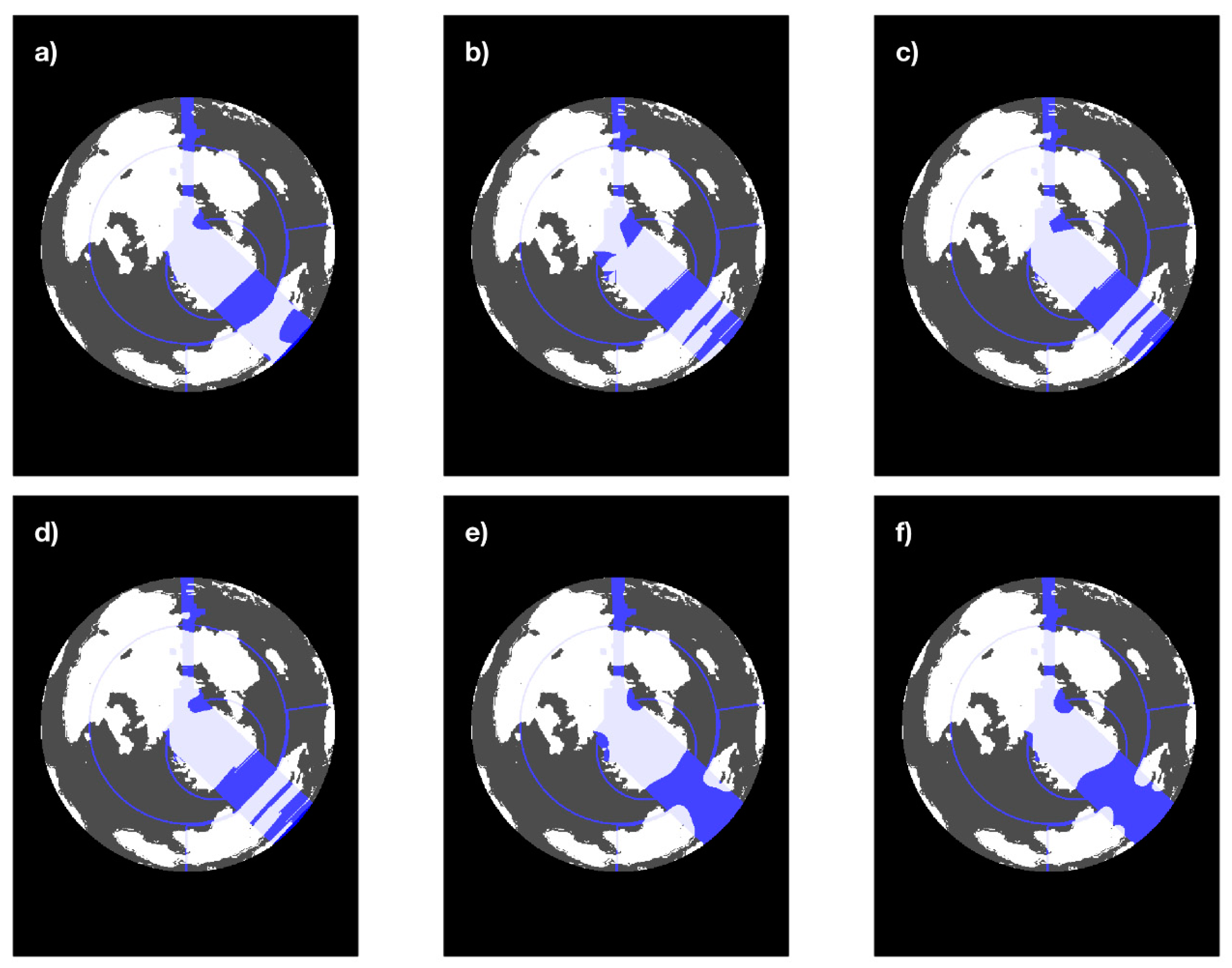
2.2. Projection of Cloud Mask from Hemispherical to Planar Coordinate System
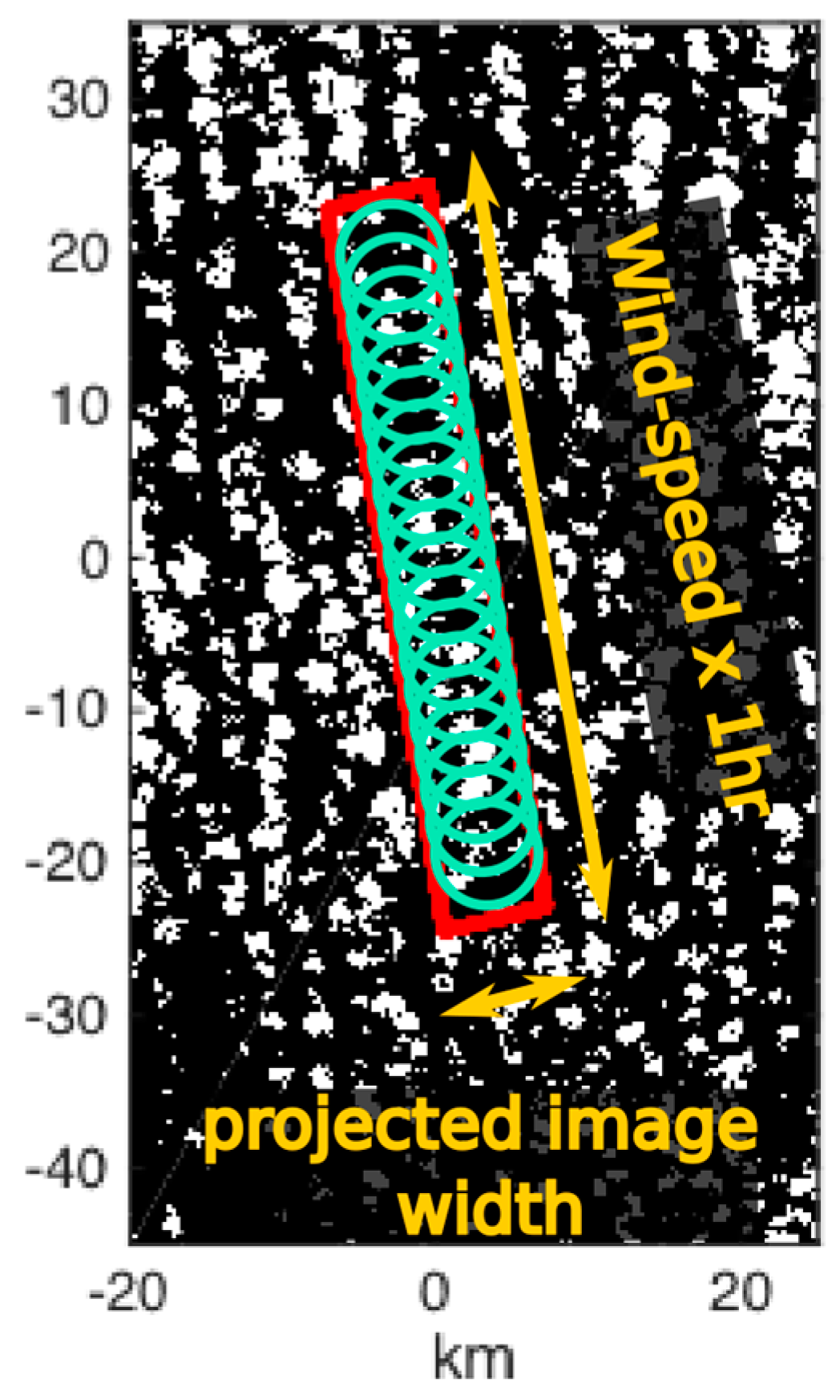
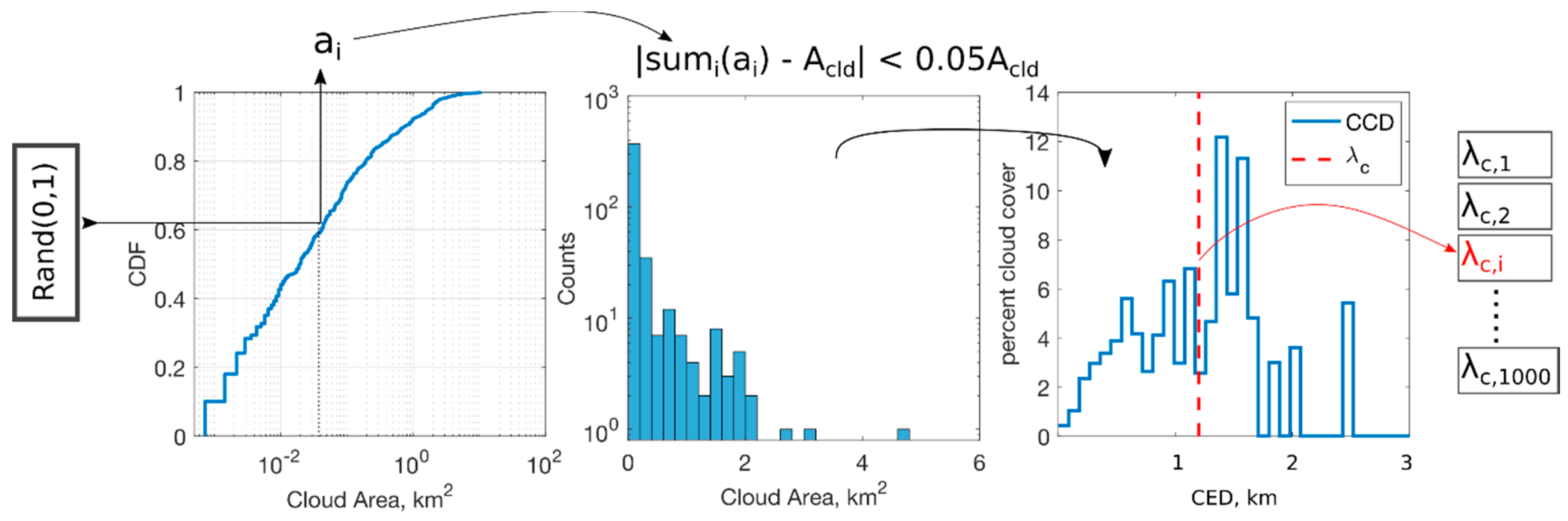
2.3. Computation of Cloud Areas and the Corresponding CED
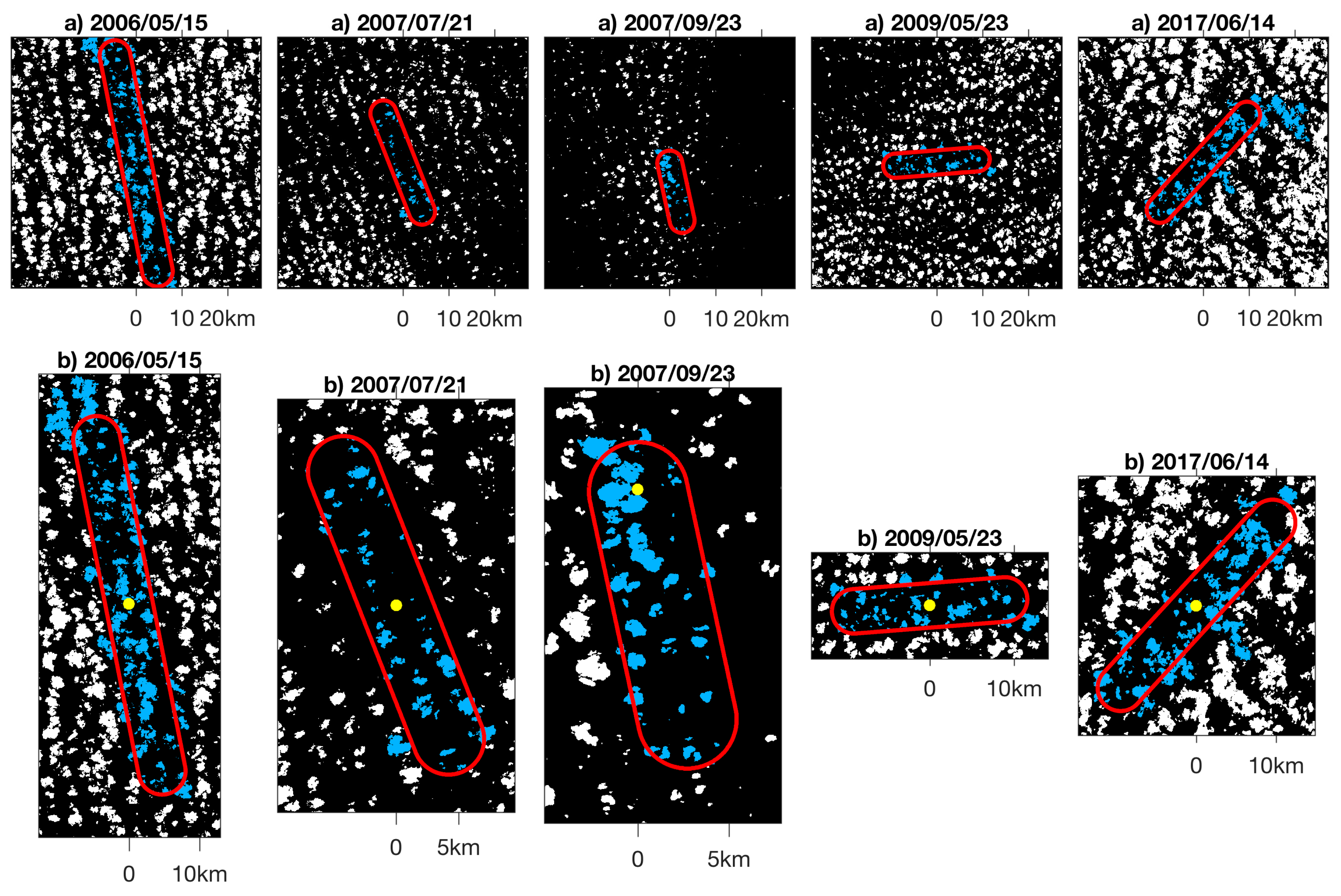
3. Data
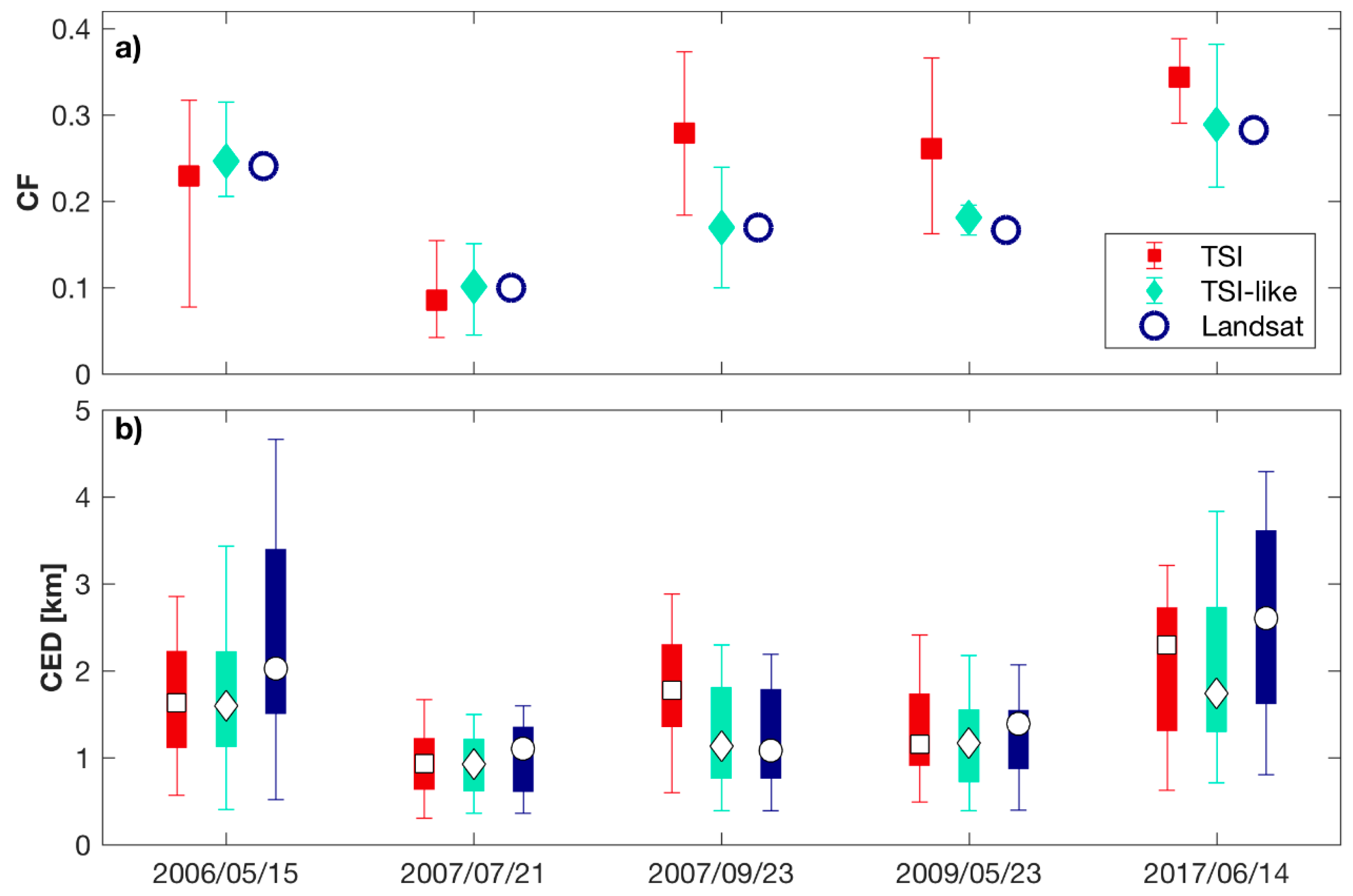
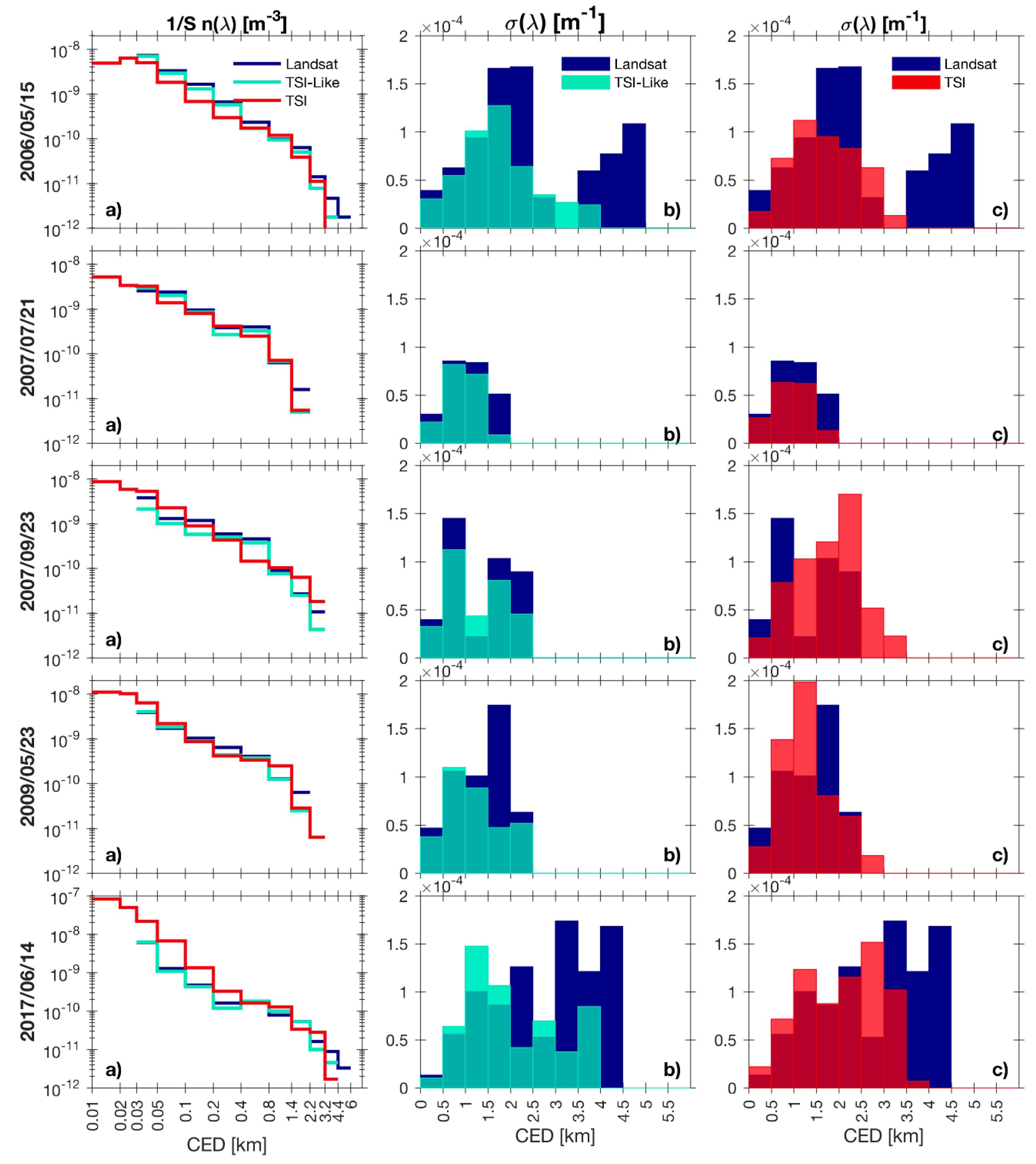
4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Two-Dimensional Interpolation over Image Obstructions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mask Parameter | Resolution | Default Cloud Mask | Adjusted |
|---|---|---|---|
| Image width | low | 125 pixels | n/a |
| high | 207 pixels | n/a | |
| Shadowband width | low | 34 pixels | 42 pixels |
| high | 60 pixels | 76 pixels | |
| Camera arm width | low | 7 pixels | Up to 10 pixels * |
| high | 14 pixels | Up to 25 pixels * | |
| Camera box size | low | varies | Up to 25 pixels * |
| high | varies | Up to 25 pixels * |


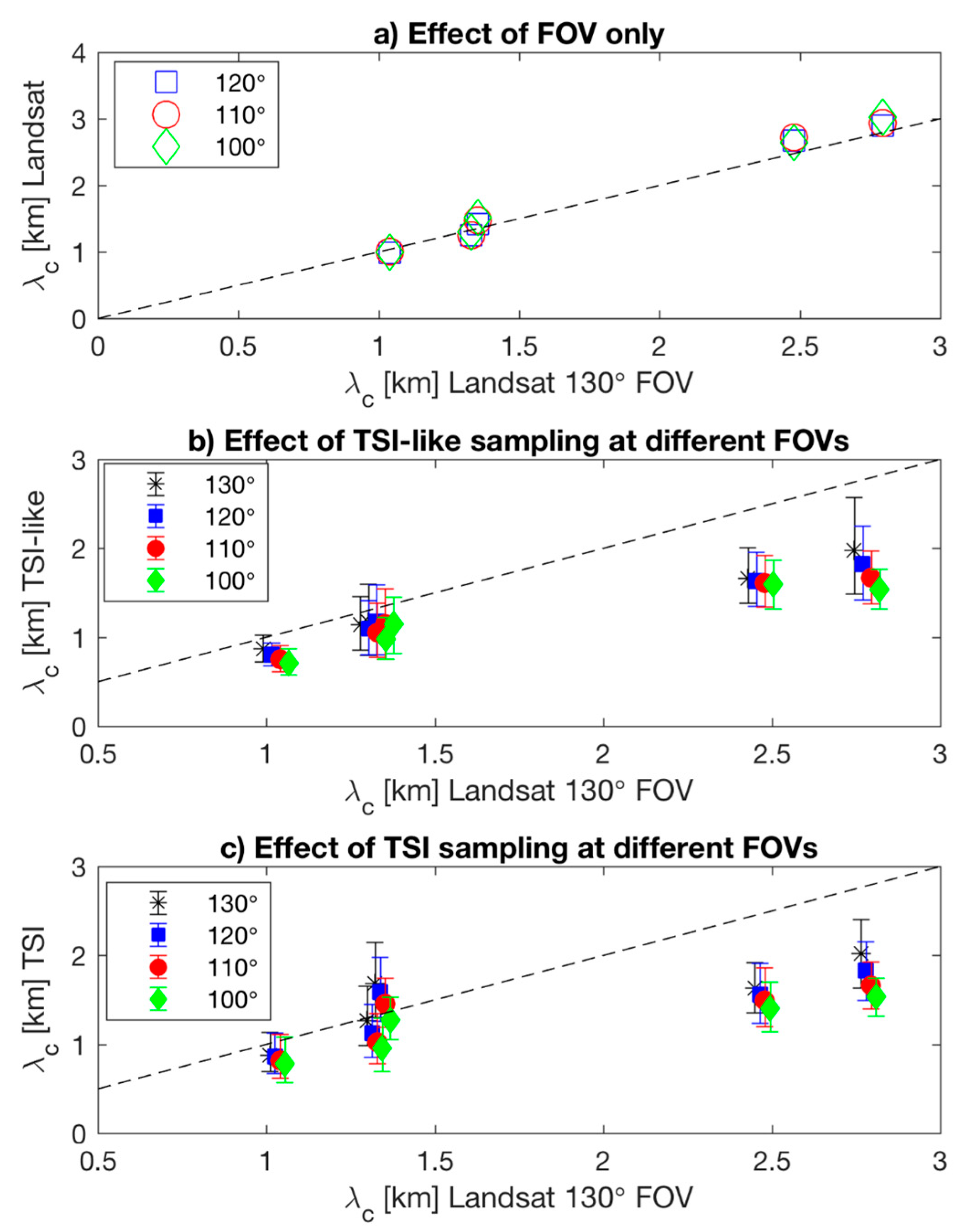
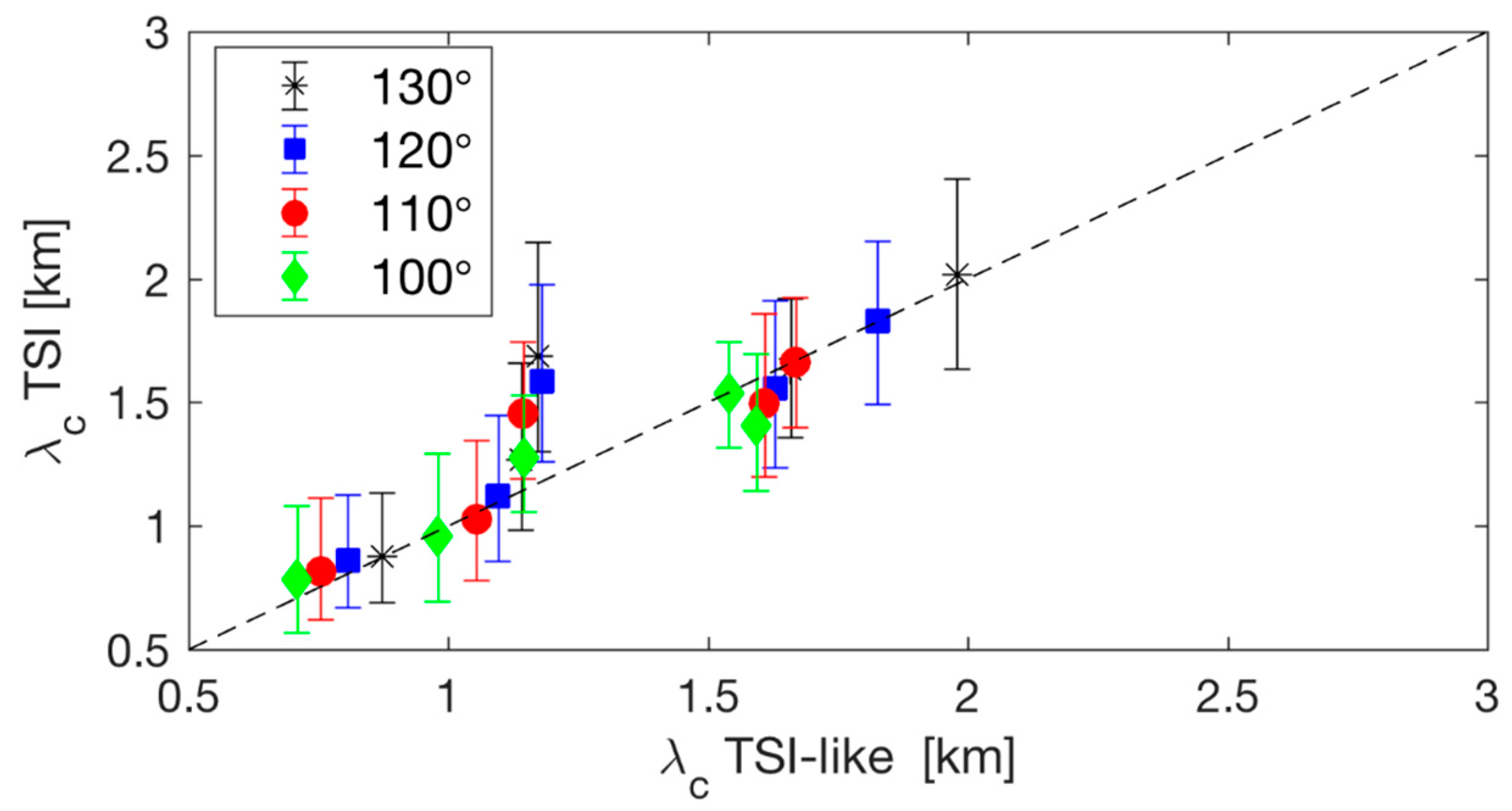
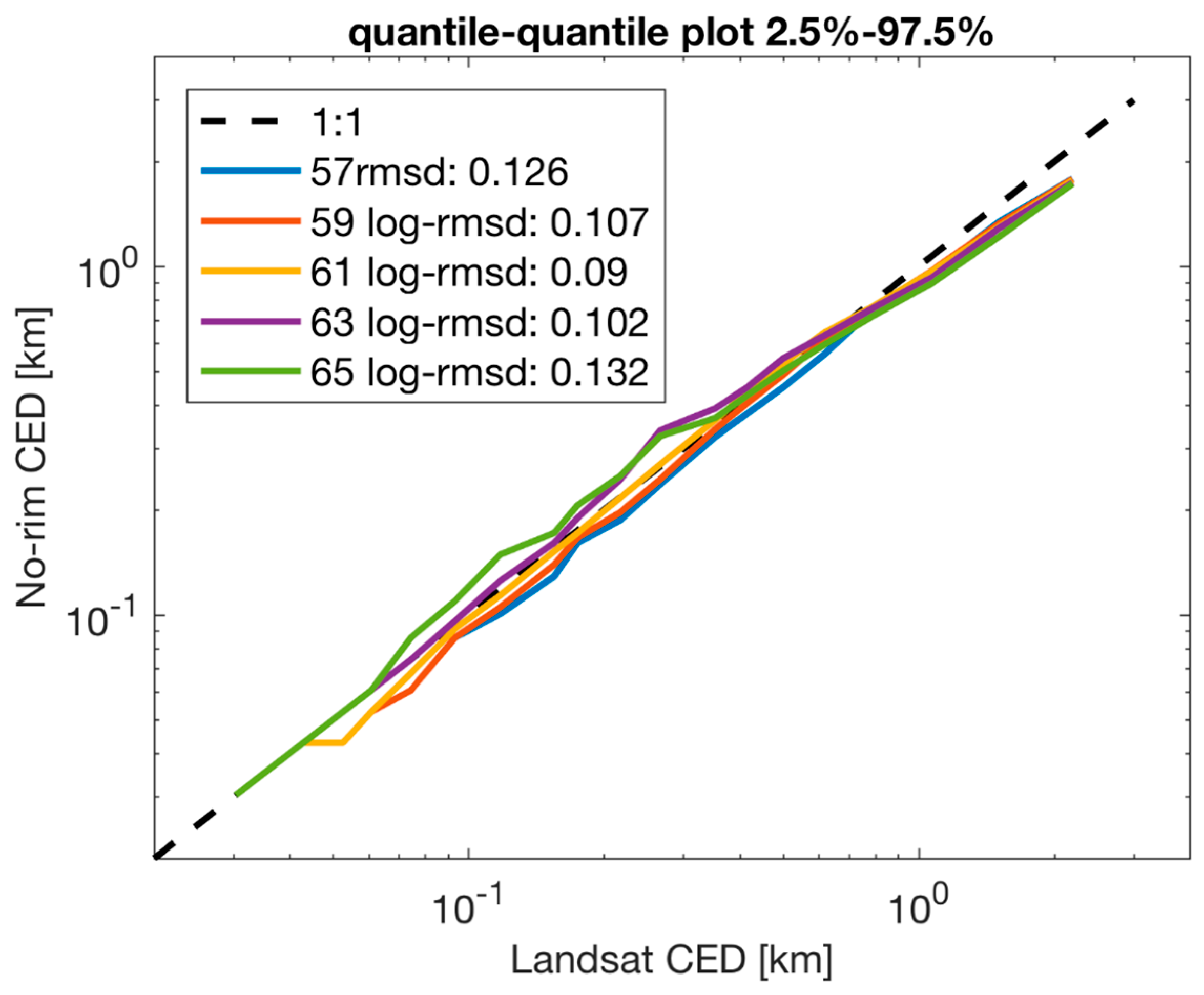
Appendix B. Sensitivity Study of Maximum Field of View
- How sensitive is the TSI CED product to the maximum FOV?
- How does the maximum FOV influence agreement between TSI-derived and Landsat-derived CED?




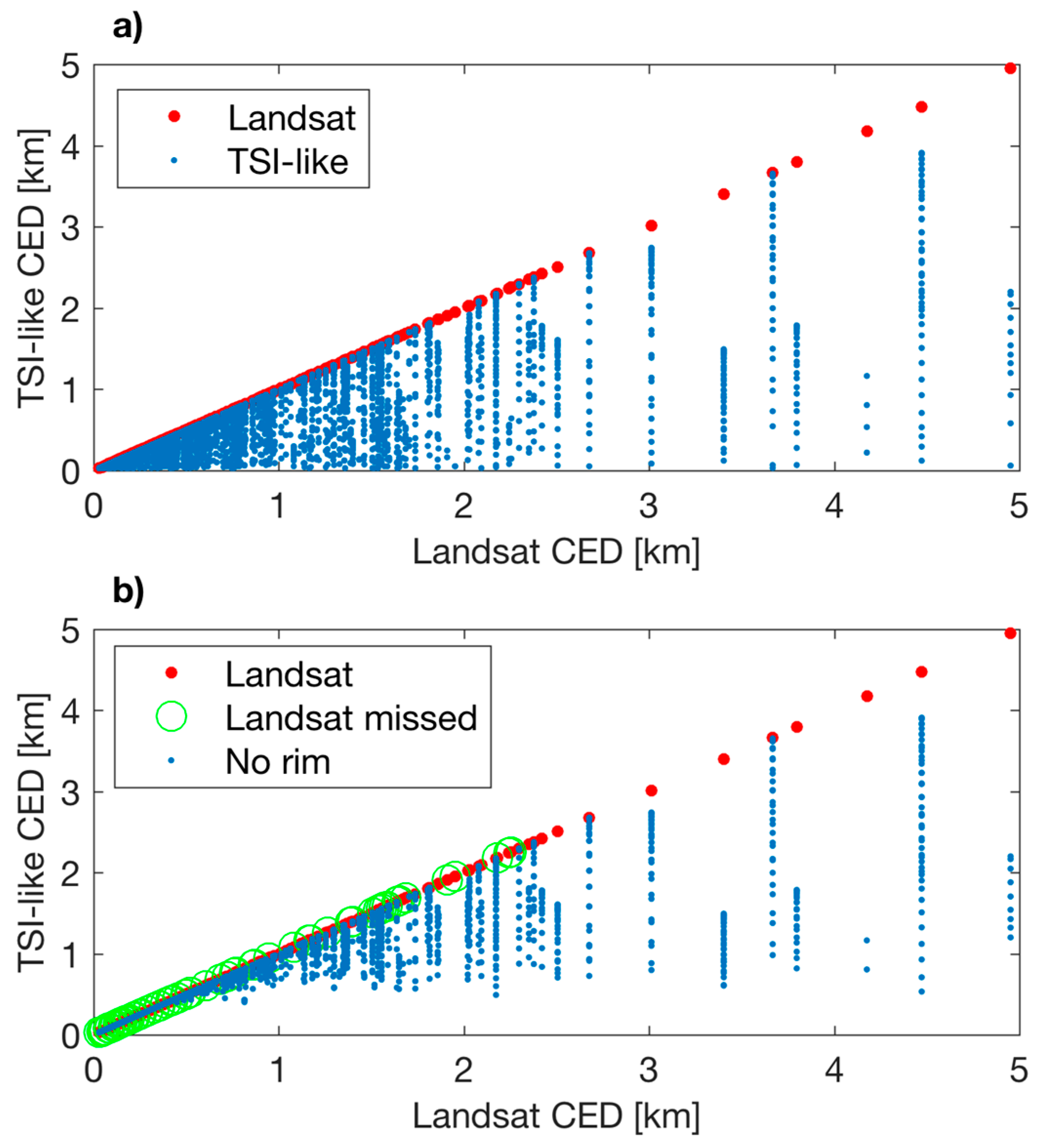
Appendix C. Incomplete Viewing of Clouds (Truncation)


Appendix D. Spatial Resolution of Projected Images
References
- Benner, T.C.; Curry, J.A. Characteristics of small tropical cumulus clouds and their impact on the environment. J. Geophys. Res. 1998, 103, 28753–28767. [Google Scholar] [CrossRef] [Green Version]
- Koren, I.; Oreopoulos, L.; Feingold, G.; Remer, L.A.; Altaratz, O. How small is a small cloud? Atmos. Chem. Phys. 2008, 8, 3855–3864. [Google Scholar] [CrossRef] [Green Version]
- Berg, L.K.; Kassianov, E.I. Temporal variability of fair-weather cumulus statistics at the ACRF SGP site. J. Clim. 2008, 21, 3344–3358. [Google Scholar] [CrossRef]
- Berg, L.K.; Kassianov, E.I.; Long, C.N.; Mills, D.L. Surface summertime radiative forcing by shallow cumuli at the Atmospheric Radiation Measurement Southern Great Plains site. J. Geophys. Res. 2011, 116, D01202. [Google Scholar] [CrossRef]
- Kivalov, S.N.; Fitzjarrald, D.R. Quantifying and modelling the effect of cloud shadows on the surface irradiance at tropical and midlatitude forests. Bound.-Lay. Meteorol. 2018, 166, 165–198. [Google Scholar] [CrossRef]
- Chandra, A.S.; Kollias, P.; Albrecht, B.A. Multiyear summertime observations of daytime fair-weather cumuli at the ARM Southern Great Plains Facility. J. Clim. 2013, 26, 10031–10050. [Google Scholar] [CrossRef]
- Rodts, S.M.A.; Duynkerke, P.G.; Jonker, H.J.J. Size distributions and dynamical properties of shallow cumulus clouds from aircraft observations and satellite data. J. Atmos. Sci. 2003, 60, 1895–1912. [Google Scholar] [CrossRef]
- Jiang, H.; Feingold, G.; Jonsson, H.H.; Lu, M.; Chuang, P.Y.; Flagan, R.C.; Seinfeld, J.H. Statistical comparison of properties of simulated and observed cumulus clouds in the vicinity of Houston during the Gulf of Mexico Atmospheric Composition and Climate Study (GoMACCS). J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef] [Green Version]
- Romps, D.M.; Vogelmann, A.M. Methods for estimating 2D cloud size distributions from 1D observations. J. Atmos. Sci. 2017, 74, 3405–3417. [Google Scholar] [CrossRef]
- Wielicki, B.A.; Welch, R.M. Cumulus cloud properties derived using Landsat satellite data. J. Clim. Appl. Meteorol. 1986, 25, 261–276. [Google Scholar] [CrossRef]
- Zhao, G.; Di Girolamo, L. Statistics on the macrophysical properties of trade wind cumuli over the tropical western Atlantic. J. Geophys. Res. 2007, 112, D10204. [Google Scholar] [CrossRef]
- Zhao, G.; Di Girolamo, L. Cloud fraction errors for trade wind cumuli from EOS-Terra instruments. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef] [Green Version]
- Calbó, J.; Sabburg, J. Feature extraction from whole-sky ground-based images for cloud-type recognition. J. Atmos. Ocean. Technol. 2008, 25, 3–14. [Google Scholar] [CrossRef]
- Long, C.N.; Sabburg, J.M.; Calbó, J. Retrieving cloud characteristics from ground-based daytime color all-sky images. J. Atmos. Ocean. Technol. 2006, 23, 633–652. [Google Scholar] [CrossRef]
- Kleissl, J. Solar Energy Forecasting and Resource Assessment; Academic Press: Cambridge, MA, USA, 2013; ISBN 978-0-12-397772-4. [Google Scholar]
- Sibson, R. A brief description of natural neighbour interpolation. In Interpreting Multivariate Data; Wiley: Chichester, UK, 1981; pp. 21–36. [Google Scholar]
- Chow, C.W.; Urquhart, B.; Lave, M.; Dominguez, A.; Kleissl, J.; Shields, J.; Washom, B. Intra-hour forecasting with a total sky imager at the UC San Diego solar energy testbed. Sol. Energy 2011, 85, 2881–2893. [Google Scholar] [CrossRef]
- Nguyen, D.A.; Kleissl, J. Stereographic methods for cloud base height determination using two sky imagers. Sol. Energy 2014, 107, 495–509. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 4th ed.; Pearson: New York, NY, USA, 2017; ISBN 978-0-13-335672-4. [Google Scholar]
- Holben, B.; Flynn, L.; Gregory, L.; Ma, L.; Wagener, R.; Morris, V.R. Total Sky Imager (TSISKYCOVER). Southern Great Plains (SGP) Central Facility, Lamont, OK (C1); ARM Atmospheric Radiation Measurement Climate Research Facility: Oak Ridge, TN, USA, 1994; (Atmospheric Radiation Measurement (ARM) Climate Research Facility Data Archive: http://dx.doi.org/10.5439/1025308, accessed on 1 May 2018). [Google Scholar]
- Johnson, K.; Giangrande, S.E.; Toto, T. Active Remote Sensing of CLouds (ARSCL) Product Using Ka-Band ARM Zenith Radars (ARSCLKAZRBND1KOLLIAS) Southern Great Plains (SGP) Central Facility, Lamont, OK (C1); ARM Atmospheric Radiation Measurement Climate Research Facility: Oak Ridge, TN, USA, 1996; (Atmospheric Radiation Measurement (ARM) Climate Research Facility Data Archive: http://dx.doi.org/10.5439/1350630, accessed on 1 May 2018). [Google Scholar]
- Muradyan, P.; Coulter, R. Radar Wind Profiler (915RWPWINDCON). 1998-08-03 to 2018-06-07, Southern Great Plains (SGP) Central Facility, Lamont, OK (C1); ARM Atmospheric Radiation Measurement Climate Research Facility: Oak Ridge, TN, USA, 1997; (Atmospheric Radiation Measurement (ARM) Climate Research Facility Data Archive: http://dx.doi.org/10.5439/1025135, accessed on 1 May 2018). [Google Scholar]
- Long, C.N.; Slater, D.W.; Tooman, T.P. Total Sky Imager Model 880 Status and Testing Results; Pacific Northwest National Laboratory: Richland, WA, USA, 2001. [Google Scholar]
- Shi, Y.; Flynn, D.; Riihimaki, L. Cloud Classification (SHCUSUMMARY). 2000 to 2017, Southern Great Plains (SGP) Central Facility, Lamont, OK (C1); ARM Atmospheric Radiation Measurement Climate Research Facility: Oak Ridge, TN, USA, 2000; (Atmospheric Radiation Measurement (ARM) Climate Research Facility Data Archive: http://dx.doi.org/10.5439/1392569, accessed on 1 May 2018). [Google Scholar]
- Clothiaux, E.E.; Ackerman, T.P.; Mace, G.G.; Moran, K.P.; Marchand, R.T.; Miller, M.A.; Martner, B.E. Objective determination of cloud heights and radar reflectivities using a combination of active remote sensors at the ARM CART sites. J. Appl. Meteorol. 2000, 39, 645–665. [Google Scholar] [CrossRef]
- Tucker, C.J.; Grant, D.M.; Dykstra, J.D. NASA’s global orthorectified landsat data set. Photogramm. Eng. Remote Sens. 2004, 70, 313–322. [Google Scholar] [CrossRef]
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Hughes, M.J.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef] [Green Version]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google earth engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Wood, R.; Field, P.R. The distribution of cloud horizontal sizes. J. Clim. 2011, 24, 4800–4816. [Google Scholar] [CrossRef]
- Heus, T.; Seifert, A. Automated tracking of shallow cumulus clouds in large domain, long duration large eddy simulations. Geosci. Model Dev. 2013, 6, 1261–1273. [Google Scholar] [CrossRef] [Green Version]
- Neggers, R.A.J.; Jonker, H.J.J.; Siebesma, A.P. Size statistics of cumulus cloud populations in large-eddy simulations. J. Atmos. Sci. 2003, 60, 1060–1074. [Google Scholar] [CrossRef]
- Xiao, H.; Berg, L.K.; Huang, M. The impact of surface heterogeneities and land-atmosphere interactions on shallow clouds over ARM SGP site. J. Adv. Model. Earth Syst. 2018, 10. [Google Scholar] [CrossRef]
- Jayadevan, V.T.; Rodriguez, J.J.; Cronin, A.D. A new contrast-enhancing feature for cloud detection in ground-based sky images. J. Atmos. Ocean. Technol. 2014, 32, 209–219. [Google Scholar] [CrossRef]
- Olver, P.J. Introduction to Partial Differential Equations; Springer Science & Business Media: Berlin, Germany, 2013; ISBN 978-3-319-02099-0. [Google Scholar]
- D’Errico, J. Inpaint_nans. Mathworks File Exchange. 2006. Available online: https://www.mathworks.com/matlabcentral/fileexchange/4551-inpaint-nans (accessed on 1 May 2017).
- Urquhart, B.; Kurtz, B.; Dahlin, E.; Ghonima, M.; Shields, J.E.; Kleissl, J. Development of a sky imaging system for short-term solar power forecasting. Atmos. Meas. Tech. 2015, 8, 875–890. [Google Scholar] [CrossRef] [Green Version]






| Landsat Scene | CF (50-km) | CF Subarea | CBH (km) | Wind Speed (m/s) | Wind dir. (deg) | Width (km) | Length (km) | N TSI | N Lsat |
|---|---|---|---|---|---|---|---|---|---|
| 2006/05/15 | 0.27 | 0.26 | 1.52 | 13.4 | 349 | 6.5 | 48.2 | 2445 | 297 |
| 2007/07/21 | 0.1 | 0.1 | 1.25 | 6.5 | 159 | 5.4 | 23.4 | 1483 | 87 |
| 2007/09/23 | 0.04 | 0.15 (1) | 1.25 | 7.2 | 168 | 5.4 | 25.9 | 1700 | 60 |
| 2009/05/23 | 0.17 | 0.16 | 1.24 | 5 | 85 | 5.3 | 18 | 2017 | 80 |
| 2017/06/14 | 0.33 | 0.3 | 1.3 | 7.8 | 223 | 5.6 | 28.1 | 4093 | 85 |
| Date | Statistic | Lsat (whole, km) (1) | Lsat (cut-off, km) (2) | TSI-Like (km) | TSI (km) |
|---|---|---|---|---|---|
| 2006/05/15 | L50 | 2.03 | 1.64 | 1.60 | 1.63 |
| λc | 2.48 | 1.75 | 1.73 | 1.69 | |
| 2007/07/21 | L50 | 1.11 | 0.79 | 0.93 | 0.93 |
| λc | 1.04 | 0.92 | 0.92 | 0.93 | |
| 2007/09/23 | L50 | 1.09 | 0.96 | 1.13 | 1.78 |
| λc | 1.35 | 1.32 | 1.27 | 1.79 | |
| 2009/05/23 | L50 | 1.39 | 0.96 | 1.17 | 1.15 |
| λc | 1.33 | 1.16 | 1.20 | 1.30 | |
| 2017/06/14 | L50 | 2.60 | 1.77 | 1.74 | 2.30 |
| λc | 2.79 | 2.30 | 2.05 | 2.06 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kleiss, J.M.; Riley, E.A.; Long, C.N.; Riihimaki, L.D.; Berg, L.K.; Morris, V.R.; Kassianov, E. Cloud Area Distributions of Shallow Cumuli: A New Method for Ground-Based Images. Atmosphere 2018, 9, 258. https://doi.org/10.3390/atmos9070258
Kleiss JM, Riley EA, Long CN, Riihimaki LD, Berg LK, Morris VR, Kassianov E. Cloud Area Distributions of Shallow Cumuli: A New Method for Ground-Based Images. Atmosphere. 2018; 9(7):258. https://doi.org/10.3390/atmos9070258
Chicago/Turabian StyleKleiss, Jessica M., Erin A. Riley, Charles N. Long, Laura D. Riihimaki, Larry K. Berg, Victor R. Morris, and Evgueni Kassianov. 2018. "Cloud Area Distributions of Shallow Cumuli: A New Method for Ground-Based Images" Atmosphere 9, no. 7: 258. https://doi.org/10.3390/atmos9070258
APA StyleKleiss, J. M., Riley, E. A., Long, C. N., Riihimaki, L. D., Berg, L. K., Morris, V. R., & Kassianov, E. (2018). Cloud Area Distributions of Shallow Cumuli: A New Method for Ground-Based Images. Atmosphere, 9(7), 258. https://doi.org/10.3390/atmos9070258