1. Introduction
Surface-piercing propellers (SPPs) are also known as Surface penetrating propellers. The SPP is so named because part of the propeller is above the water surface and the rest is under the water during normal operation. Compared with the conventional propellers, the SPPs mainly have the following three advantages (Ding et al. [
1]): (1) the resistance of the appendages, such as the paddle shaft and the shaft bracket, is minimized; (2) propeller diameter is no longer limited by some parameters such as soak depth and stern frame; and (3) the cavitation erosion on the blade surface is substantially reduced. Due to these advantages, the SPPs become an optimal choice for high-speed boats and some shallow draft ships, and thus have really good application prospects.
However, in some cases the SPPs might be operated under the large water immersion, e.g., the boats are at the bow-up status, which makes the SPPs be in heavy load conditions. One of the practical approaches to solve this problem is setting an aeration pipe in front of SPPs to ventilate the blades. This approach has been adopted in some actual boats and achieved significant results. Nonetheless, few attentions have been paid on how the ventilation of blades improves the hydrodynamic characteristics of SPPs. To this end, this paper is dedicated to investigate the influence of the ventilation of blades on the hydrodynamic performance of SPPs using numerical methods.
In some simplified studies, the surface-piercing process of an SPP blade can be deemed as the water-entry process of a 2D profile, which is easy to be understood. Zhao et al. [
2] used the non-linear boundary element method to investigate the characteristics of the sprays generated by the water-entry of wedges with different bottom-angles. It was found that the increase of the wetted area directly leads to a great slamming pressure on the wetted surface. And when the slope angle of the bottom is larger than 30°, there is no typical slamming pressure concentration phenomenon due to the smaller wetted surface. Young et al. [
3], in his doctoral dissertation, carried out similar studies on the water-entry of wedges, and analyzed the pressure distribution on the wetted surface of a flat plate under different entry angles.
Yari et al. [
4] conducted a preliminary study on a wedge entering the water under different inclination angles. The obtained pressure distribution, free surface deformation, and so on agree well with the experimental data. Yu et al. [
5] carried out a numerical study on the water entry problem of a 2D cross-section profile, and found that the cup shape of the trailing edge can enhance the hydrodynamic load on the edge, while reducing the lift-to-drag ratio as well as the efficiency of the propeller.
Ghassemi et al. [
6] investigated the hydrodynamics of SPPs named SPP-1 and SPP-2 under full and half immersed conditions using a boundary element method (BEM). The numerical results agree well with experimental ones. In the study, they found that the Weber number has significant influence on the ventilation status of the SPP. Kinnas et al. [
7] studied the bubble flow around the hydrofoil and SPPs using a BEM, in which they investigated the hydrodynamic effects of the bubble flow on the hydrofoil and SPPs with various blade profiles. Young et al. [
8,
9] carried out a series of studies on large-scale SPPs and super-vacuum paddles also by using the BEM, which contributed to the knowledge of the hydrodynamics of these propellers.
With the development of the computer technology, the CFD methods become popular and play the role of benchmark in the numerical studies on surface-piercing propellers. Young et al. [
3] predicted the hydrodynamic performance of large-scale surface paddles using a coupled boundary element method–finite element method (BEM–FEM), and found that the numerical results compared well with those obtained by the Reynolds Averaged Navier–Stokes (RANS) solver (Fluent software), in which the Reynolds stress tensor was modeled using the SST form of the
turbulence model. Shi et al. [
10] investigated the wake of surface-piercing propellers, as well as the pulsating pressure on the paddles and the deformation of the free surface after the paddles. Alimirzazadeh et al. [
11] employed the OpenFOAM software to study the hydrodynamic performance of SPP-841B surface paddle under different sway angles and immersion depths. In the study, the
based Shear Stress Transport (SST) model with automatic wall functions (mixed formulation) was employed. The numerical results agree with experimental ones well under different immersion depths, while poorly under different sway angles. They found that increasing the yaw angle would decrease the thrust coefficient and torque coefficient, while the efficiency was improved. In addition, the maximum efficiency point has not been achieved at the zero shaft yaw angle, due to the implementation of SPPs.
Obviously, in the existing works the most attention has been paid to investigating the hydrodynamic performance of SPPs under the natural operation conditions, while very little attention has been paid on the artificial ventilated SPPs. It is believed that the hydrodynamic characteristics of the artificial ventilated SPPs should be significantly different from the without-ventilation case. Thereby, we were motivated to study the SPPs under artificial ventilation conditions. In this paper, a right-handed three-blade paddle was proposed for the investigation, and an aeration pipe was installed in front of the paddle disk for the ventilation purpose. The numerical simulation was carried out based on the commercial CFD software Star-CCM+ [
12]. The rotation of the blades was realized by using the overlapped mesh technique.
2. SPP Model and Numerical Setup
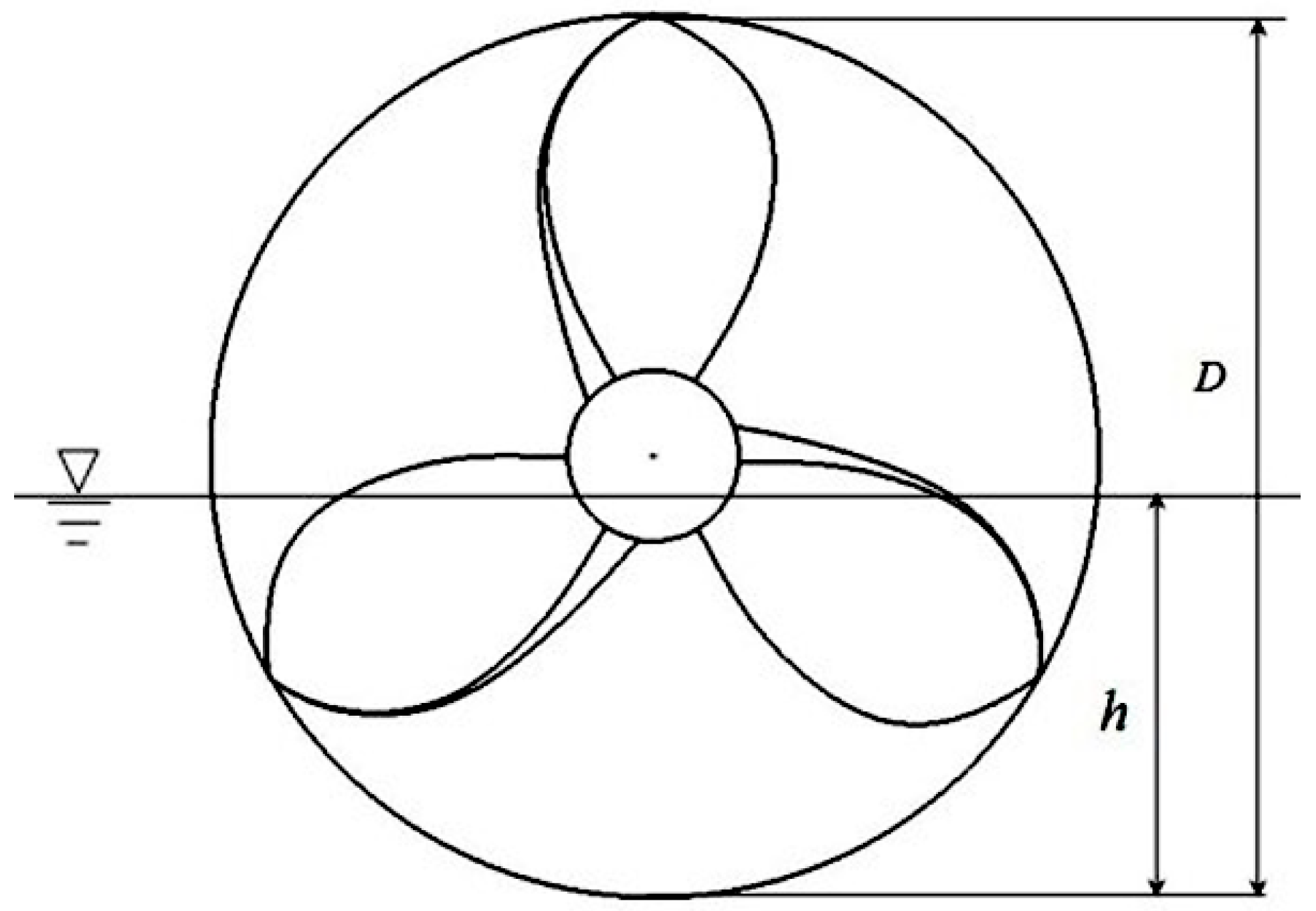
The submergence ratio of SPPs is defined as
, where
denotes the immersion depth of the propeller disc,
is the diameter of the propeller, as shown in
Figure 1.
Generally, the SPPs work on the water-air interface, and the blades rush into and out of the water in a staggered manner. In this process, the air is sucked into the water forming an air cavity, which connects the atmosphere and the paddle. This phenomenon is known as the ventilation of SPPs.
When the submergence ratio is sufficient large, the torque on the paddle will dramatically increase. For the adjustable SPPs, the torque can be reduced by decreasing the immersion depth. For the fixed SPPs, however, it is commonly difficult to adjust the immersion depth. Although the paddle may pump some air into water when it rotates, the torque can still be very large. For the purpose of torque reduction, an aeration pipe is generally installed in front of the paddle to ventilate the blades and thus reduce the torque.
2.1. SPP Model
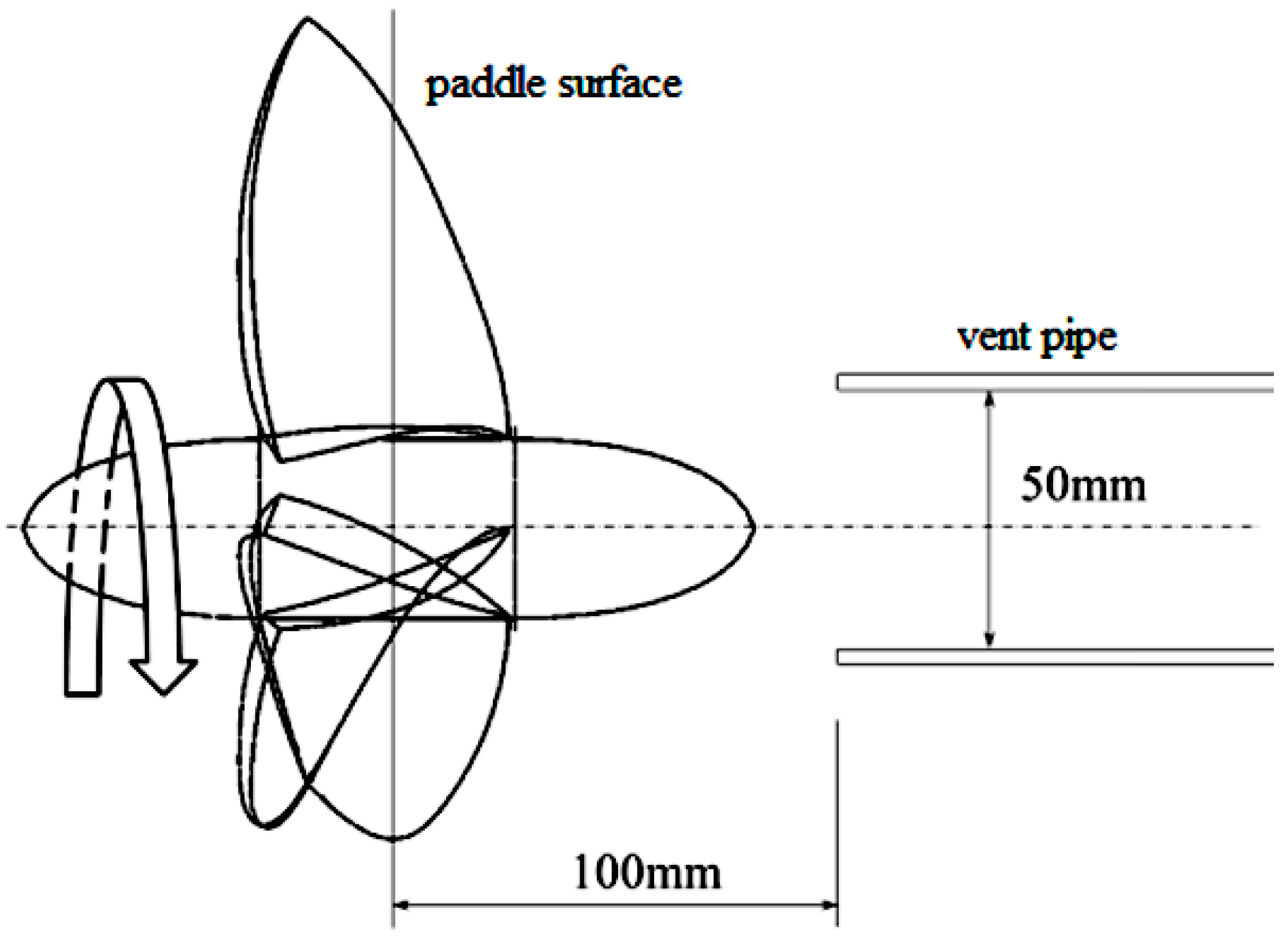
The SPP proposed for the calculation is the SPP-1 type surface-piercing propeller model given in
Table 1 [
6], with the rotation direction being right-handed and the profile being S-C type. The diameter of the aeration pipe is 50 mm, and the distance from the outlet of the aeration pipe to the paddle surface is 100 mm. The sketch of the propeller and the vent pipe are shown in
Figure 2.
2.2. Control Equation
Under the full immersion condition, ventilation through the aeration pipe allows the paddle always being in an unsteady air-water two-phase flow field. The VOF (volume of fluid) model [
13] was selected for capturing the interface between water and air. Air and water in the flow field are deemed incompressible.
Mass conservation equation can be written as:
The above equation is a general expression of the mass conservation equation, where the term Sm can be any user-defined source term added to the continuity term.
The momentum equations are given as:
where
is the velocity component in the xi direction (
) of the Cartesian coordinate system,
the fluid pressure,
the fluid density,
the dynamic viscosity coefficient,
the time, and
the volume force.
In this paper, the
SST [
14,
15] was employed as the turbulence model, which could take the transport characteristics of turbulent shear forces into account, and make possible to obtain more accurately results of the flow separation in the counter pressure gradient region [
16].
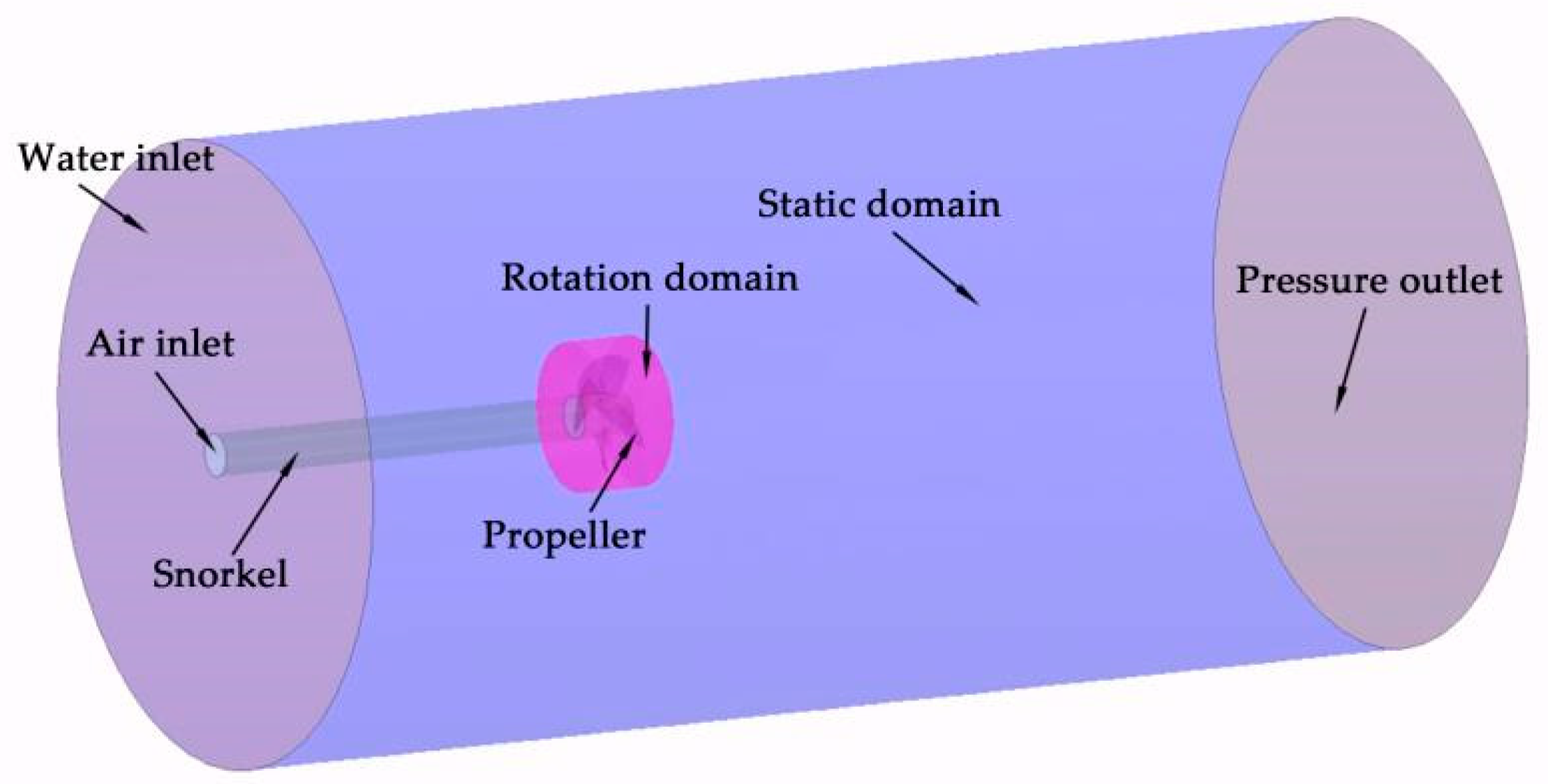
2.3. Computational Domain and Grid Division
In order to make the flow field around the propeller be fully developed, and the numerical results be accurate and reliable, the size of the flow domain in the simulation should be large enough. In practice, the entire flow domain is divided into two parts: a cylindrical rotating zone containing the paddle and an outer cylindrical stationary zone. The outer diameter of the stationary zone is 5.0
D, the inlet is 3.5
D from the paddle plane, and the outlet is 7.0
D from the paddle plane. The diameter of the rotation domain is 1.2
D, and both end surfaces of the cylinder are 0.45
D from the paddle surface.
Figure 3 shows an oblique view of the propeller’s computational domain.
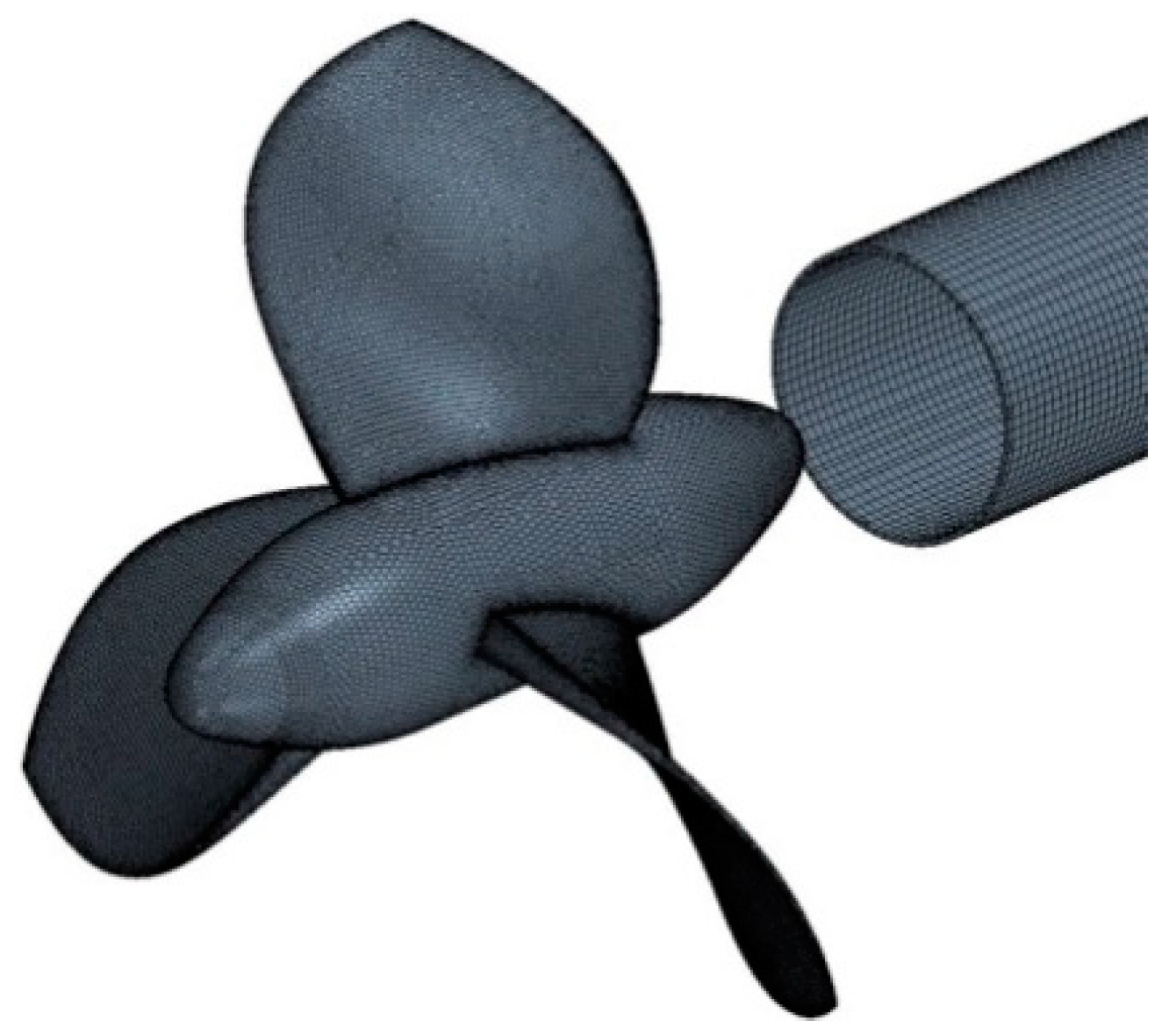
To simulate the rotation of the paddle in the flow field, the overlapped mesh method was employed. At the overlapping domain between the stationary and the rotational domains, the information of the flow field is exchanged through the overlapping grids. The mesh in the overlapping domain should be the same size as much as possible. We set the polyhedral mesh in the inner rotational domain, while the cutting body mesh in the outer stationary domain. Moreover, local mesh densification was performed around the overlapping domain. Finally, the total number of grids is 3.5 million, in which the rotation domain is 1.7 million, and the stationary domain is 1.8 million. The min and max size of computational grids are 7.65 × 10
−4 mm and 11 mm, respectively. The surface mesh is shown in
Figure 4.
2.4. Grid Convergence
Let
Y+ be the non-dimensional wall distance defined as
, where
is the friction velocity at the nearest wall,
the distance to the nearest wall, and
the local kinematic viscosity of the fluid. In this sub-section the sensitivity of numerical results with respect to
is studied. Generally, the range of dimensionless wall distance
Y+
is acceptable for blade surfaces.
Table 2 lists the error of the thrust coefficient
and torque coefficient
compared with the test value with different
Y+ value. It can be seen that three errors reach minimum when the
Y+ is equal to 60. Therefore, we set
Y+ = 60 in the meshing setup.
Grid convergence study is important in the mesh generation process. Here four grid numbers, 1.77 million (G1), 2.5 million (G2), 3.5 million (G3), and 5 million (G4) are selected for the convergence study. The grid number and simulation results are given in
Table 3. From these results, it is clearly noticed that with the growth of grid number, the results get closer to the experimental ones, i.e., the grid convergence can be guaranteed in these numbers. However, the greater the grid number, the lower computational efficiency for the numerical simulation. It is found that the accuracy was only slightly improved in the G4 case at the expense of a lot of calculation time. Hence, when determining the grid number, one should make a compromise between accuracy and efficiency. In this paper, the fine mesh of G3 was adopted in the present simulations, which achieves both computational efficiency and accuracy.
2.5. Boundary and Initial Conditions
Due to the air-suck phenomenon, the flow around the surface-piercing paddle is usually an air-water two-phase unsteady one. The density of water and air in the simulation is 997.56 kg/m3 and 1.18 kg/m3, respectively. The dynamic viscosity of water and air is 8.89 × 10−4 Pa·s and 1.86 × 10−5 Pa·s, respectively. The VOF approach was employed to track the air-water interface. The principle of this approach is to determine the interface by counting the volume ratio function of the fluid in each cell rather than the motion of the particle on the free surface.
The fluid density can be expressed as:
where
is the volume fraction of the
mth type of fluid in each cell, which satisfies the following condition:
In this paper, velocity inlet was divided into air velocity inlet and water velocity inlet. Both inlets have the same velocity vector. The volume fraction of the overall inlet was set as the mixture of air and water fractions, where the volume fraction of air at the air velocity inlet was set to 1, and the water volume fraction was set to 0. The outlet is set as a pressure outlet and the standard atmospheric pressure is made as the reference pressure. The outer wall of the stationary zone is set as a plane of symmetry, and the surfaces of the surface-piercing paddle and the vent pipe are set to be non-slip and non-penetrable. The outer boundary of the rotation domain is set to overlapped grids.
The second-order schemes were applied for spatial discretization and linear interpolation, as well as the time integration. The time step is 6.94 × 10
−5 s, during which the propeller rotates 1° under the given rotational speed. As suggested by Blocken and Gualtieri [
17], this time step makes the condition CFL
1 satisfied. The numerical calculation was performed on a PC with an Intel Xeon CPU X5690 (6 cores, 3.46 GHz), and one case simulation approximately costs 40 h.
2.6. Validation of the Numerical Setup
To verify the aforementioned numerical setup, the hydrodynamic performance of a propeller in the open water was investigated and compared with experimental results from Ghassemi et al. [
6]. The main parameters of the SPP-1 propeller are listed in
Table 1. The hydrodynamic characteristics are plotted using solid lines (see
Figure 5). Let
,
,
, and
be the thrust, torque, rotational speed, and forward speed of the propeller, respectively. The relevant parameters for the propeller can be nondimensionalized as follows.
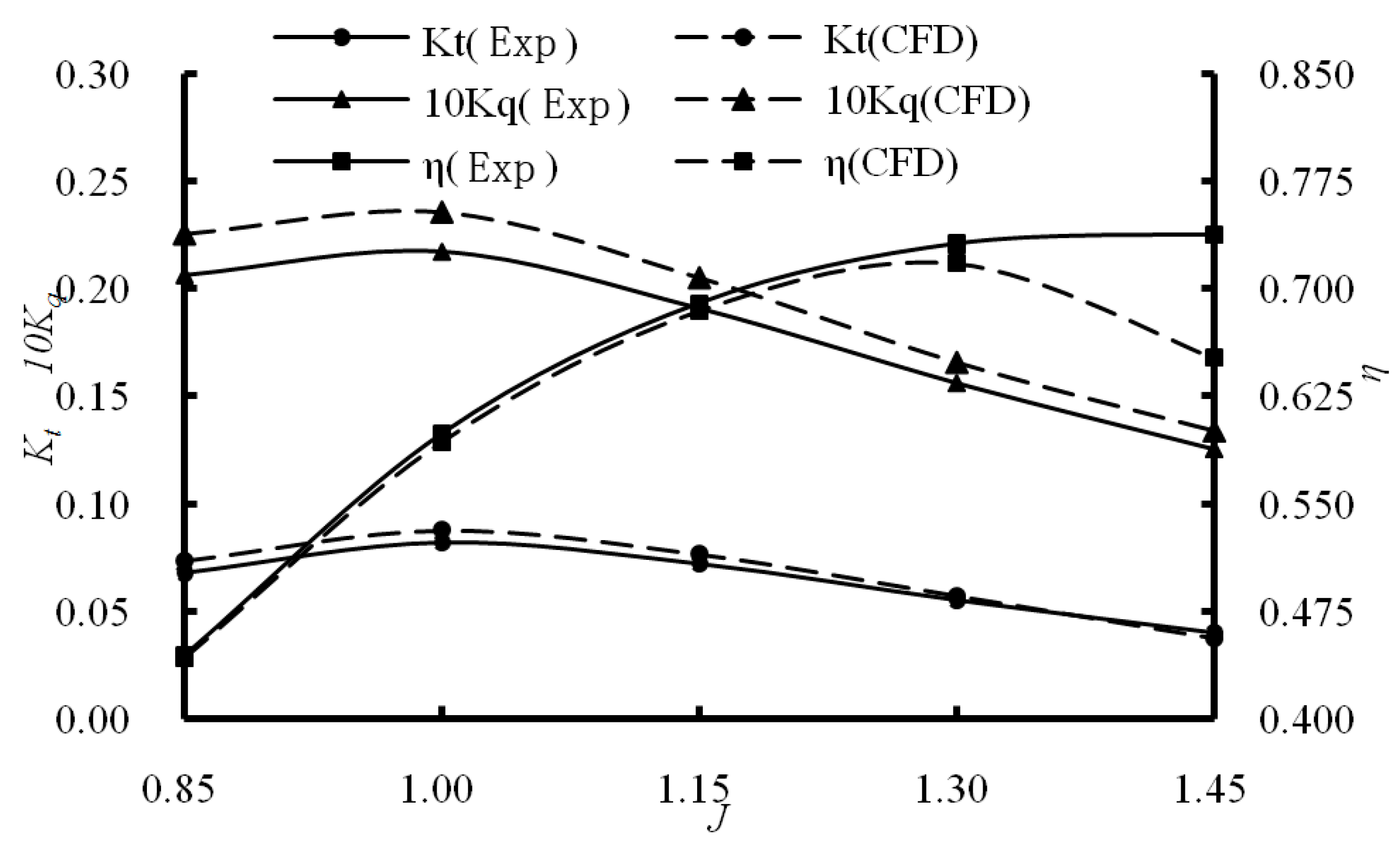
In the numerical and experimental setup, the submergence ratio for the propeller is , and the rotational speed is n = 2400 rpm. The speed coefficient ranges from 0.85 to 1.45, which was obtained by varying the magnitude of the incoming flow velocity .
By using the CFD solver, we obtained the thrust coefficient
, the torque coefficient
of the propeller, and the open water efficiency
.
is used due to the fact that
is one order smaller than
and
.
Figure 5 compares the CFD results with the experimental ones given in
Table 1 [
6].
As shown in
Figure 5, the thrust coefficient
obtained by the CFD is slightly larger than the experimental one when
, and then the discrepancy gradually decreases with the growth of
. The torque coefficient
has a similar trend but the discrepancy between CFD and experimental results is slightly larger than that in the
case. In contrast, the open water efficiency η obtained by the CFD is always slightly smaller than the experimental one when
, but the error rapidly grows with
when
and reaches its maximum 12% at
. This study demonstrates that the numerical setup in the CFD solver is effective and can provide the required precision for the hydrodynamic simulation of the propeller with the existence of air-water interface.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}