An Automatic Irrigation Control System for Soilless Culture of Lettuce

Abstract
:1. Introduction
2. Material and Methods
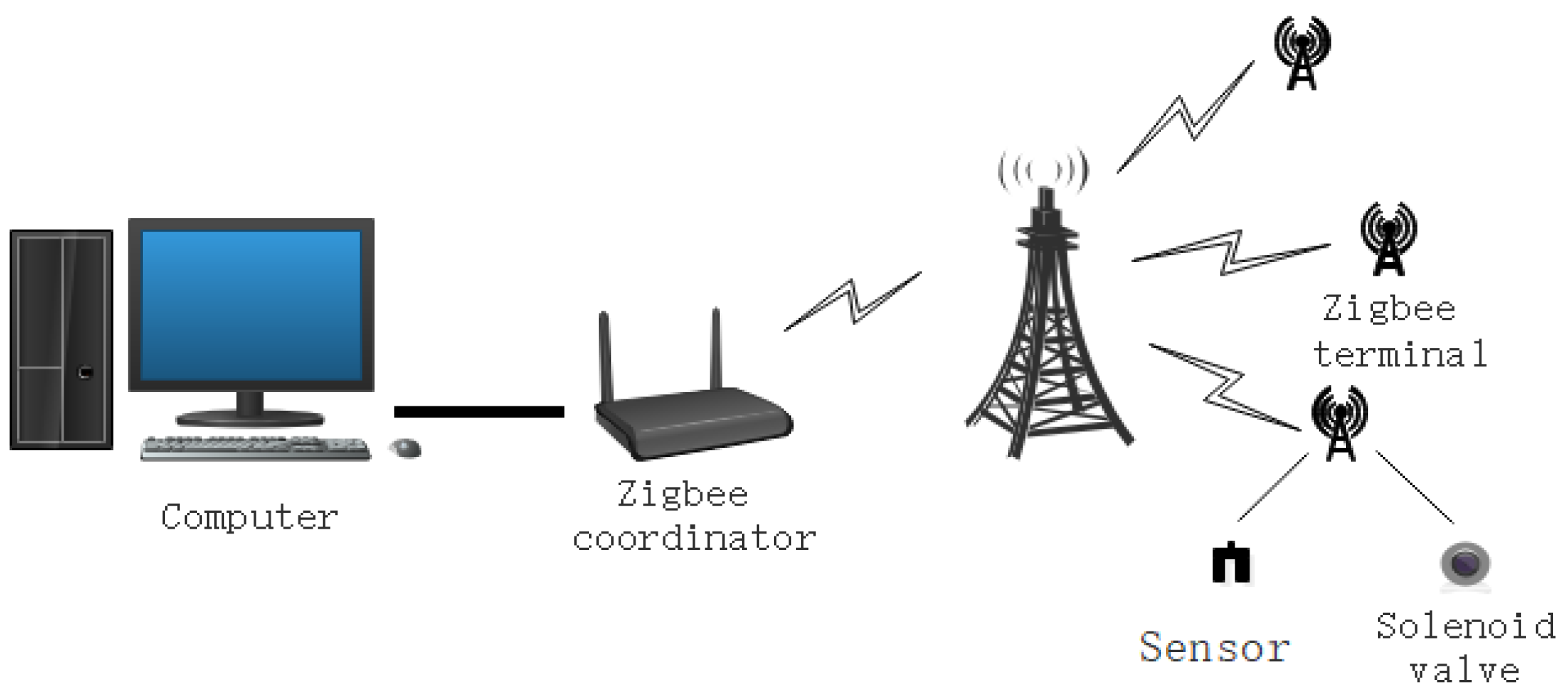
2.1. Configuration of the System
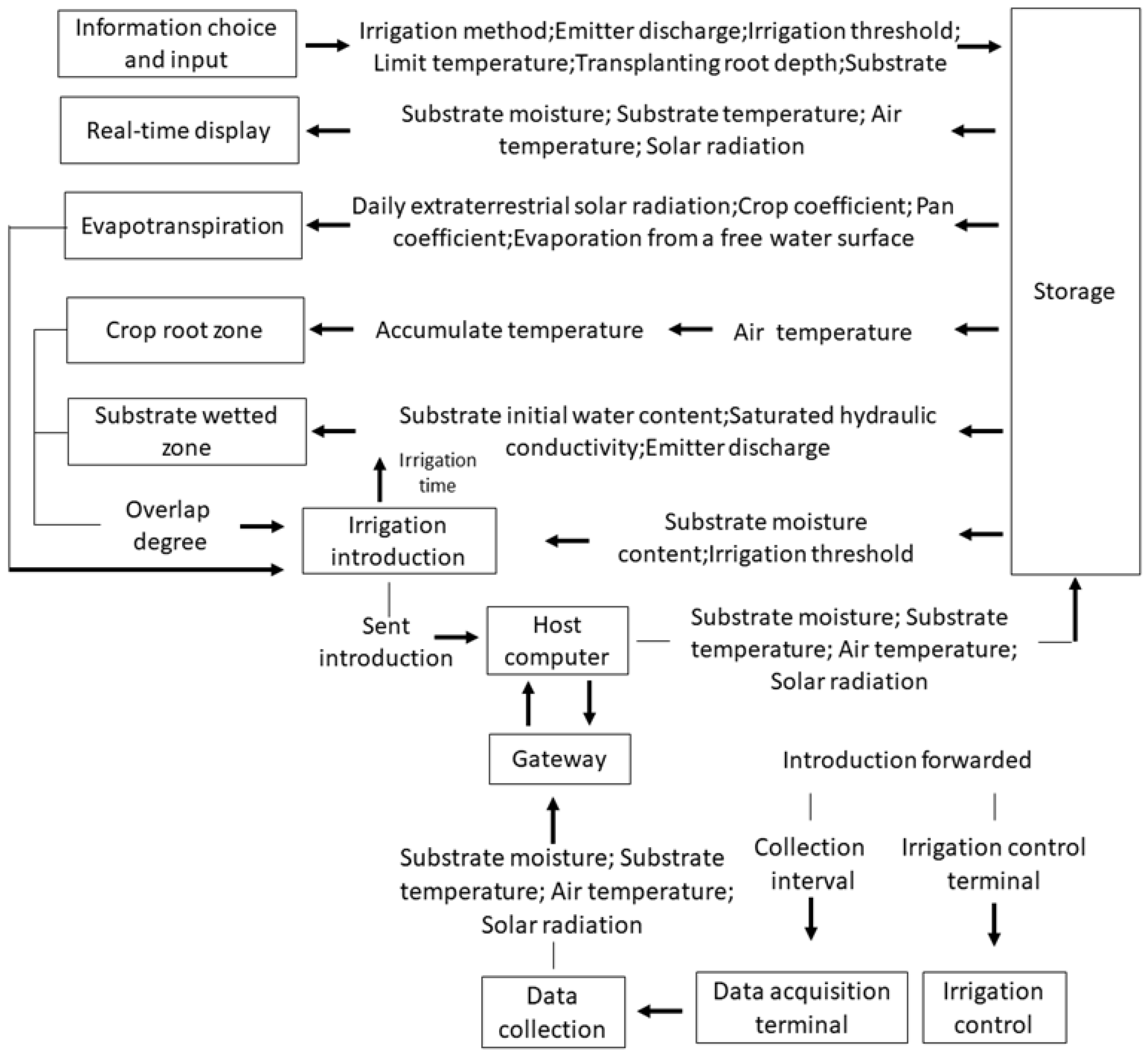
2.2. Irrigation Control Strategy
2.3. Irrigation Control Model
2.3.1. Substrate Moisture Sensor Calibration Model
2.3.2. Crop Water Evapotranspiration Simulation Model
2.3.3. Crop Root Zone Simulation Model
2.3.4. Substrate Wetted Zone Simulation Model
2.3.5. Overlapping-Degree Model
2.4. Crop Cultivation and Experimental Conditions
2.5. Analysis
3. Results and Discussion
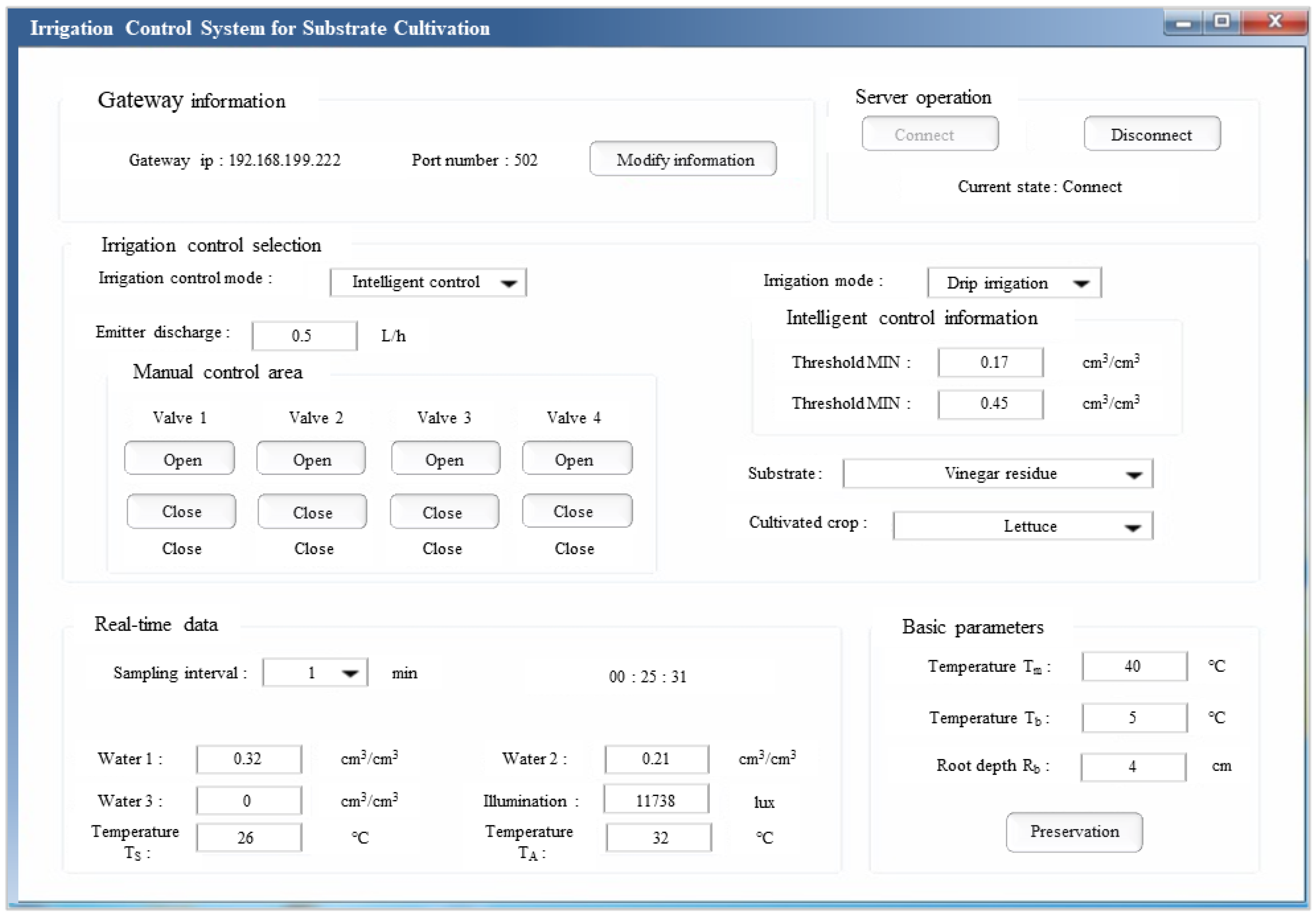
3.1. Software Application Development
3.2. Model Parameters
3.3. Performance of the Control System
3.3.1. Crop Performance
3.3.2. Drainage Rate at Each Irrigation
3.3.3. Irrigation Water Use Efficiency
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Johnson, W.C.; Jackson, L.E.; Ochoa, O.; van Wijk, R.; Peleman, J.; Clair, D.A.S.; Michelmore, R.W. Lettuce, a shallow-rooted crop, and Lactuca serriola, its wild progenitor, differ at QTL determining root architecture and deep soil water exploitation. Theor. Appl. Genet. 2000, 101, 1066–1073. [Google Scholar] [CrossRef]
- Bozkurt, S.; Mansuroglu, G.S. The effects of drip line depths and irrigation levels on yield, quality and water use characteristics of lettuce under greenhouse. Afr. J. Biotechnol. 2011, 10, 3370–3379. [Google Scholar]
- Sahin, U.; Kuslu, Y.; Kiziloglu, F.M.; Cakmakci, T. Growth, yield, water use and crop quality responses of lettuce to different irrigation quantities in a semi-arid region of high altitude. J. Appl. Hortic. 2016, 18, 195–202. [Google Scholar]
- Fei, L.; Wang, A.; Wang, L.; Yin, C.; Wang, J. Experiment on substrate cultivation of cherry tomatoes in sunlight greenhouse with drip irrigation. J. Drain. Irrig. Mach. Eng. 2016, 34, 1070–1076. [Google Scholar]
- Lu, J.; Wang, J.; Liu, J.; Lu, H.; Li, P. Water distribution of mixed media in elevated strawberry cultivation. J. Drain. Irrig. Mach. Eng. 2017, 35, 535–540. [Google Scholar]
- Rodríguez, D.; Reca, J.; Martínez, J.; Urrestarazu, M. New Adaptive Hybrid-Automatic Irrigation Control System for Soilless Culture. J. Irrig. Drain. Eng. 2014, 141. [Google Scholar] [CrossRef]
- Rodríguez, D.; Reca, J.; Martínez, J.; López-Luque, R.; Urrestarazu, M. Development of a New Control Algorithm for Automatic Irrigation Scheduling in Soilless Culture. Appl. Math. Inf. Sci. 2015, 9, 47–56. [Google Scholar] [CrossRef]
- Turhan, E.; Sevgican, A. Effects of different growing media on greenhouse lettuce grown in soilless culture. Acta Hortic. 1999, 491, 405–408. [Google Scholar] [CrossRef]
- Engindeniz, S.; Tuzel, Y. Economic analysis of organic greenhouse lettuce production in turkey. Sci. Agric. 2006, 63, 285–290. [Google Scholar] [CrossRef]
- Chauhan, Y.S.; Wright, C.C.; Holzworth, D.; Rachaputi, R.C.N.; Payero, J.O. AQUAMAN: A web-based decision support system for irrigation scheduling in peanuts. Irrig. Sci. 2013, 31, 271–283. [Google Scholar] [CrossRef]
- Norrie, J.; Graham, M.E.D.; Dubé, P.A.; Gosselin, A. Improvements in Automatic Irrigation of Peat-grown Greenhouse Tomatoes. HortTechnology 1994, 4, 154–159. [Google Scholar]
- Munyaradzi, M.; Nyambo, B.; Mashonjowa, E.; Rupere, T. Low Cost Automated Irrigation Controller for A Greenhouse on An 8 Bit PIC Microcontroller Using A Radiation Sensor. Internal J. Innov. Technol. Res. 2013, 1, 130–135. [Google Scholar]
- Ferrarezi, R.S.; Dove, S.K.; van Iersel, M.W. An Automated System for Monitoring Soil Moisture and Controlling Irrigation Using Low-cost Open-source Microcontrollers. HortTechnology 2015, 25, 100–118. [Google Scholar]
- Montesano, F.F.; van Iersel, M.W.; Parente, A. Timer versus moisture sensor-based irrigation control of soilless lettuce:Effects on yield, quality and water use efficiency. Hort. Sci. 2016, 43, 67–75. [Google Scholar]
- Debnath, M.; Patel, N.; Mishra, A.K.; Varghese, C. Irrigation Scheduling Using Low Cost Plant Leaf Temperature Sensor Based Water Application System for Increasing Water Productivity of Fruit Crop. Int. J. Electron. Commun. Comput. Eng. 2016, 7, 49–56. [Google Scholar]
- Viani, F.; Bertolli, M.; Salucci, M.; Polo, A. Low-Cost Wireless Monitoring and Decision Support for Water Saving in Agriculture. IEEE Sens. J. 2017, 17, 4299–4309. [Google Scholar] [CrossRef]
- Nagarajan, G.; Minu, R.I. Wireless Soil Monitoring Sensor for Sprinkler Irrigation Automation System. Wirel. Pers. Commun. 2017, 98, 1–17. [Google Scholar] [CrossRef]
- Montesano, F.F.; Iersel, M.W.V.; Boari, F.; Cantore, V.; Parente, A. Sensor-based irrigation management of soilless basil using a new smart irrigation system: Effects of set-point on plant physiological responses and crop performance. Agric. Water Manag. 2015, 203, 20–29. [Google Scholar] [CrossRef]
- Mafuta, M.; Zennaro, M.; Bagula, A.; Ault, G.; Gombachika, H.; Chadza, T. Successful Deployment of a Wireless Sensor Network for Precision Agriculture in Malawi. Int. J. Distrib. Sens. Netw. 2013, 9, 1–13. [Google Scholar] [CrossRef]
- Liu, Z.G.; Li, P.P.; Hu, Y.G.; Zhang, X. Calibration method for detection of matrix water content with dielectric-type moisture sensor. Trans. CSAE 2011, 27, 109–202. [Google Scholar]
- Doorenbos, J.; Pruitt, W.O. Guidelines for Predicting Crop Water Requirements; Food and Agriculture Organization of the United Nations: Rome, Italy, 1977. [Google Scholar]
- Zhang, X.; Zhuang, W.; Li, H.; Zhang, Q.; Liu, T. Research of Pan Coefficient Kp in Southwest of China. J. Irrig. Drain. 2018, 35, 109–112. [Google Scholar]
- Liu, Z.G.; Wang, J.Z.; Xu, Y.F.; Li, P.P. Root Growth Model of Lettuce under Different Cultivation Substrates and Irrigation Modes. Trans. Chin. Soc. Agric. Mach. 2014, 45, 284–288. [Google Scholar]
- Liu, Z.G.; Li, P.P.; Hu, Y.G. Modeling the Wetting Patterns in Cultivation Substrates under Drip Irrigation. J. Coast. Res. 2015, 73, 173–176. [Google Scholar] [CrossRef]
- Liu, Z.G.; Xu, Q.C. Wetting patterns estimation in cultivation substrates under drip irrigation. Desalin. Water Treat. 2018, 112, 319–324. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| EC-5 Sensor | Root Depth (Z) | Wetted Radius | Wetted Depth | ||||
|---|---|---|---|---|---|---|---|
| a | b | c | bz | A1 | n1 | A2 | n2 |
| 1.83 | 522.24 | 597.41 | 0.014 | 0.15 | 1.01 | 2.96 | 0.28 |
| Coefficient | Root Zone Radius (R) | |||
|---|---|---|---|---|
| h | i | j | k | |
| d | 5.04 × 10−10 | −5.61 × 10−7 | 4.24 × 10−5 | 0.08 |
| e | −1.15 × 10−8 | 1.48 × 10−5 | −4.48 × 10−3 | −0.53 |
| f | 4.69 × 10−8 | −7.26 × 10−5 | 2.98 × 10−2 | −0.34 |
| g | −2.67 × 10−8 | 3.58 × 10−5 | −9.95 × 10−3 | −0.46 |
| Irrigation Methods | FW in Spring/g | FW in Summer/g | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 7 day | 14 day | 21 day | 28 day | 35 day | 7 day | 14 day | 21 day | 28 day | 35 day | |
| Intelligent irrigation | 3.15 a | 10.14 a | 31.65 a | 92.21 a | 211.20 a | 1.78 a | 6.57 a | 20.96 a | 85.08 a | 178.52 a |
| Manual control irrigation | 2.06 b | 7.12 b | 18.63 b | 76.18 b | 181.13 b | 1.37 b | 5.21 b | 16.30 b | 63.71 b | 160.38 b |
| Irrigation Methods | Irrigation Frequency | Spring | ||
|---|---|---|---|---|
| Irrigation Amount/m3 | Drainage Amount/m3 | Drainage Rate/% | ||
| Intelligent irrigation | 1 | 0.224 a | 0.020 a | 8.93 a |
| 2 | 0.202 a | 0.017 a | 8.41 a | |
| Manual control irrigation | 1 | 0.444 b | 0.110 b | 24.75 b |
| Irrigation Methods | Irrigation Frequency | Summer | ||
|---|---|---|---|---|
| Irrigation Amount/m3 | Drainage Amount/m3 | Drainage Rate/% | ||
| Intelligent irrigation | 1 | 0.211 a | 0.020 a | 9.48 a |
| 2 | 0.202 a | 0.021 a | 10.40 a | |
| 3 | 0.224 a | 0.022 a | 9.82 a | |
| 4 | 0.219 a | 0.021 a | 9.59 a | |
| Manual control irrigation | 1 | 0.444 b | 0.108 b | 24.32 b |
| 2 | 0.444 b | 0.128 b | 28.83 b | |
| 3 | 0.444 b | 0.122 b | 27.48 b | |
| Irrigation methods | Accumulated | |||||||
|---|---|---|---|---|---|---|---|---|
| Spring | Summer | |||||||
| Irrigation/m3 | Drainage/m3 | FW/kg | IWUE/kg m3 | Irrigation/m3 | Drainage/m3 | FW/kg | IWUE/kg m3 | |
| Intelligent irrigation | 6.18 a | 0.53 a | 12.67 a | 2.05 a | 7.48 a | 0.736 a | 10.71 a | 1.43 a |
| Manual control irrigation | 8.89 b | 2.21 b | 10.87 b | 1.22 b | 13.33 b | 3.59 b | 9.62 b | 0.72 b |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Xu, Q. An Automatic Irrigation Control System for Soilless Culture of Lettuce. Water 2018, 10, 1692. https://doi.org/10.3390/w10111692
Liu Z, Xu Q. An Automatic Irrigation Control System for Soilless Culture of Lettuce. Water. 2018; 10(11):1692. https://doi.org/10.3390/w10111692
Chicago/Turabian StyleLiu, Zhigang, and Qinchao Xu. 2018. "An Automatic Irrigation Control System for Soilless Culture of Lettuce" Water 10, no. 11: 1692. https://doi.org/10.3390/w10111692
APA StyleLiu, Z., & Xu, Q. (2018). An Automatic Irrigation Control System for Soilless Culture of Lettuce. Water, 10(11), 1692. https://doi.org/10.3390/w10111692