Predictive Uncertainty Estimation in Water Demand Forecasting Using the Model Conditional Processor




Abstract
:1. Introduction
2. Model Conditional Processor (MCP)
3. Case Study Description and Discussion of Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Abu-Mahfouz, A.M.; Hamam, Y.; Page, P.R.; Djouani, K.; Kurien, A. Real-time dynamic hydraulic model for potable water loss reduction. Proc. Eng. 2016, 154, 99–106. [Google Scholar] [CrossRef]
- Anele, A.O.; Hamam, Y.; Abu-Mahfouz, A.M.; Todini, E. Overview, comparative assessment and recommendations of forecasting models for short-term water demand prediction. Water 2017, 9, 887. [Google Scholar] [CrossRef]
- Hamam, Y.; Brameller, A. Hybrid method for the solution of piping networks. Proc. Inst. Electr. Eng. 1971, 118, 1607–1612. [Google Scholar] [CrossRef]
- Billings, R.B.; Agthe, D.E. State-space versus multiple regression for forecasting urban water demand. J. Water Resour. Plan. Manag. 1998, 124, 113–117. [Google Scholar] [CrossRef]
- Adamowski, J.F. Peak daily water demand forecast modeling using artificial neural networks. J. Water Resour. Plan. Manag. 2008, 134, 119–128. [Google Scholar] [CrossRef]
- Qi, G.; Hamam, Y.; Van Wyk, B.J.; Du, S. Model-free prediction based on tracking theory and newton form of polynomial. World Acad. Sci. Eng. Technol. 2011, 5, 882–889. [Google Scholar]
- Donkor, E.A.; Mazzuchi, T.A.; Soyer, R.; Alan Roberson, J. Urban water demand forecasting: Review of methods and models. J. Water Resour. Plan. Manag. 2012, 140, 146–159. [Google Scholar] [CrossRef]
- Gharun, M.; Azmi, M.; Adams, M.A. Short-term forecasting of water yield from forested catchments after Bushfire: A case study from southeast Australia. Water 2015, 7, 599–614. [Google Scholar] [CrossRef]
- Pacchin, E.; Alvisi, S.; Franchini, M. A short-term water demand forecasting model using a moving window on previously observed data. Water 2017, 9, 172. [Google Scholar] [CrossRef]
- Brentan, B.M.; Luvizotto, E., Jr.; Herrera, M.; Izquierdo, J.; Pérez-García, R. Hybrid regression model for near real-time urban water demand forecasting. J. Comput. Appl. Math. 2017, 309, 532–541. [Google Scholar] [CrossRef]
- Candelieri, A. Clustering and support vector regression for water demand forecasting and anomaly detection. Water 2017, 9, 224. [Google Scholar] [CrossRef]
- Aly, A.H.; Wanakule, N. Short-term forecasting for urban water consumption. J. Water Resour. Plan. Manag. 2004, 130, 405–410. [Google Scholar] [CrossRef]
- Alvisi, S.; Franchini, M.; Marinelli, A. A short-term, pattern-based model for water-demand forecasting. J. Hydroinform. 2007, 9, 39–50. [Google Scholar] [CrossRef]
- Cutore, P.; Campisano, A.; Kapelan, Z.; Modica, C.; Savic, D. Probabilistic prediction of urban water consumption using the SCEM-UA algorithm. Urban Water J. 2008, 5, 125–132. [Google Scholar] [CrossRef]
- Caiado, J. Performance of combined double seasonal univariate time series models for forecasting water demand. J. Hydrol. Eng. 2009, 15, 215–222. [Google Scholar] [CrossRef]
- Todini, E. A model conditional processor to assess predictive uncertainty in flood forecasting. Int. J. River Basin Manag. 2008, 6, 123–137. [Google Scholar] [CrossRef]
- Coccia, G.; Todini, E. Recent developments in predictive uncertainty assessment based on the model conditional processor approach. Hydrol. Earth Syst. Sci. 2011, 15, 3253–3274. [Google Scholar] [CrossRef]
- Alvisi, S.; Franchini, M. Assessment of predictive uncertainty within the framework of water demand forecasting using the Model Conditional Processor (MCP). Urban Water J. 2017, 14, 1–10. [Google Scholar] [CrossRef]
- James, O.B. Statistical Decision Theory and Bayesian Analysis; Springer: New York, NY, USA, 1985; 617p, ISBN 0-387-96098-8. [Google Scholar]
- Bernardo, J.M.; Smith, A.F. Bayesian Theory; John Willey and Sons: Valencia, Spain, 1994. [Google Scholar]
- Bargiela, A. Managing uncertainty in operational control of water distribution systems. Integr. Comput. Appl. 1993, 2, 353–363. [Google Scholar]
- Barbetta, S.; Coccia, G.; Moramarco, T.; Todini, E. Case study: A real-time flood forecasting system with predictive uncertainty estimation for the Godavari River, India. Water 2016, 8, 463. [Google Scholar] [CrossRef]
- Reggiani, P.; Coccia, G.; Mukhopadhyay, B. Predictive uncertainty estimation on a precipitation and temperature reanalysis ensemble for Shigar Basin, Central Karakoram. Water 2016, 8, 263. [Google Scholar] [CrossRef]
- Todini, E. Flood forecasting and decision making in the new millennium. Where are we? Water Resour. Manag. 2017, 31, 3111–3129. [Google Scholar] [CrossRef]
- Gagliardi, F.; Alvisi, S.; Kapelan, Z.; Franchini, M. A probabilistic short-term water demand forecasting model based on the Markov Chain. Water 2017, 9, 507. [Google Scholar] [CrossRef]
- Raftery, A.E. Bayesian model selection in structural equation models. Sage Focus Ed. 1993, 154, 163. [Google Scholar]
- Krzysztofowicz, R. Bayesian theory of probabilistic forecasting via deterministic hydrologic model. Water Resour. Res. 1999, 35, 2739–2750. [Google Scholar] [CrossRef]
- Todini, E. Predictive uncertainty assessment in real time flood forecasting. In Uncertainties in Environmental Modelling and Consequences for Policy Making; Springer: Dordrecht, The Netherlands, 2009; pp. 205–228. [Google Scholar]
- Todini, E. The role of predictive uncertainty in the operational management of reservoirs. Proc. Int. Assoc. Hydrol. Sci. 2014, 364, 118–122. [Google Scholar] [CrossRef]
- Mardia, K.V.; Kent, J.T.; Bibby, J.M. Multivariate Analysis; Probability and Mathematical Statistics; Academic Press: London, UK, 1980. [Google Scholar]
- Herrera, M.; Torgo, L.; Izquierdo, J.; Pérez-García, R. Predictive models for forecasting hourly urban water demand. J. hydrol. 2010, 387, 141–150. [Google Scholar] [CrossRef]
- Laio, F.; Tamea, S. Verification tools for probabilistic forecasts of continuous hydrological variables. Hydrol. Earth Syst. Sci. Discuss. 2007, 11, 1267–1277. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE | MAPE (%) | NS Efficiency | ||||
|---|---|---|---|---|---|---|
| CAL | VAL | CAL | VAL | CAL | VAL | |
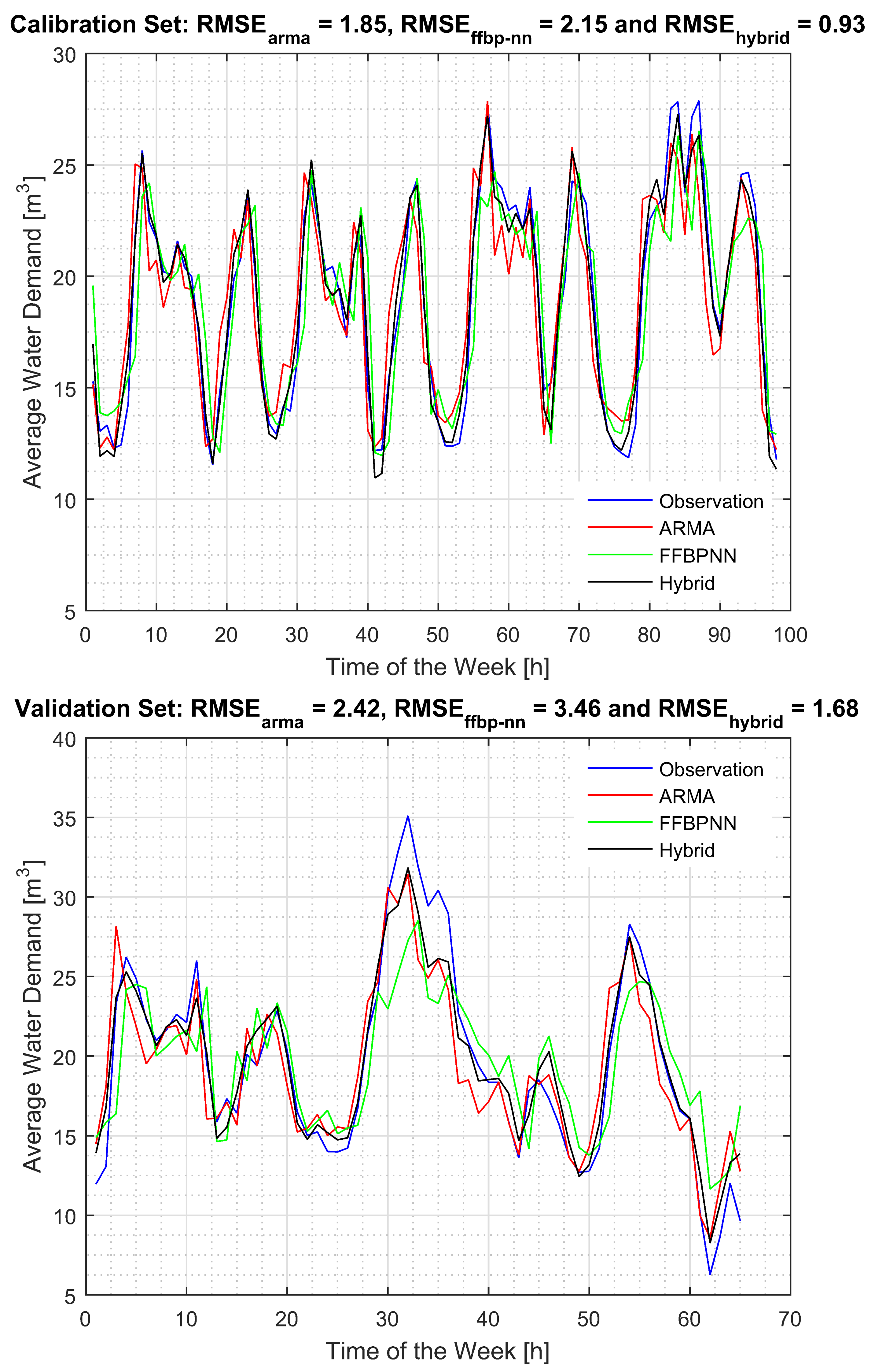
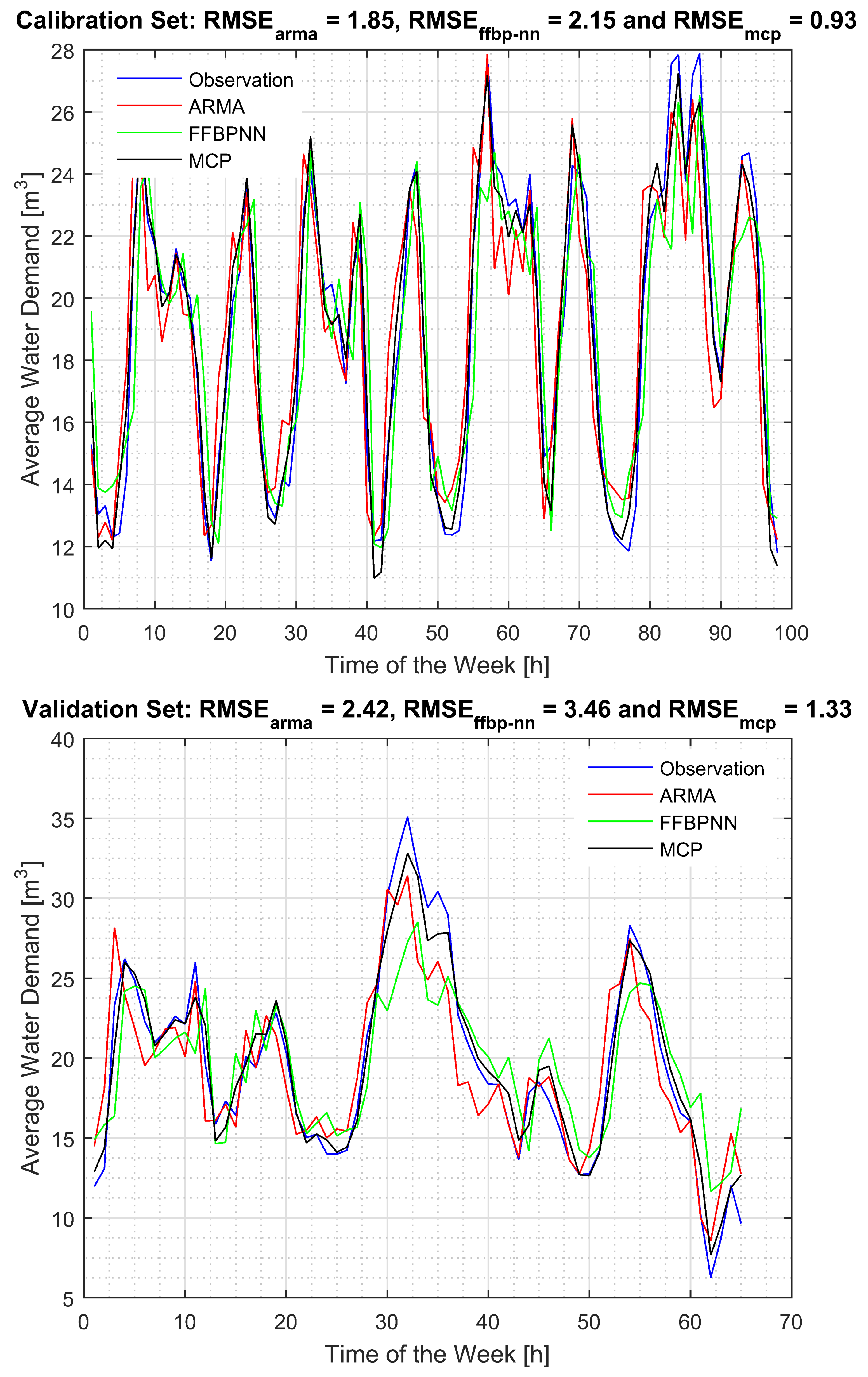
| ARMA | 1.852 | 2.418 | 8.318 | 10.288 | 0.841 | 0.844 |
| FFBP-NN | 2.151 | 3.462 | 9.027 | 15.700 | 0.786 | 0.681 |
| Hybrid model | 0.926 | 1.677 | 4.123 | 7.357 | 0.960 | 0.925 |
| MCP | 0.926 | 1.329 | 4.118 | 5.915 | 0.960 | 0.953 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anele, A.O.; Todini, E.; Hamam, Y.; Abu-Mahfouz, A.M. Predictive Uncertainty Estimation in Water Demand Forecasting Using the Model Conditional Processor. Water 2018, 10, 475. https://doi.org/10.3390/w10040475
Anele AO, Todini E, Hamam Y, Abu-Mahfouz AM. Predictive Uncertainty Estimation in Water Demand Forecasting Using the Model Conditional Processor. Water. 2018; 10(4):475. https://doi.org/10.3390/w10040475
Chicago/Turabian StyleAnele, Amos O., Ezio Todini, Yskandar Hamam, and Adnan M. Abu-Mahfouz. 2018. "Predictive Uncertainty Estimation in Water Demand Forecasting Using the Model Conditional Processor" Water 10, no. 4: 475. https://doi.org/10.3390/w10040475
APA StyleAnele, A. O., Todini, E., Hamam, Y., & Abu-Mahfouz, A. M. (2018). Predictive Uncertainty Estimation in Water Demand Forecasting Using the Model Conditional Processor. Water, 10(4), 475. https://doi.org/10.3390/w10040475