A Novel Multislope MUSCL Scheme for Solving 2D Shallow Water Equations on Unstructured Grids



Abstract
:1. Introduction
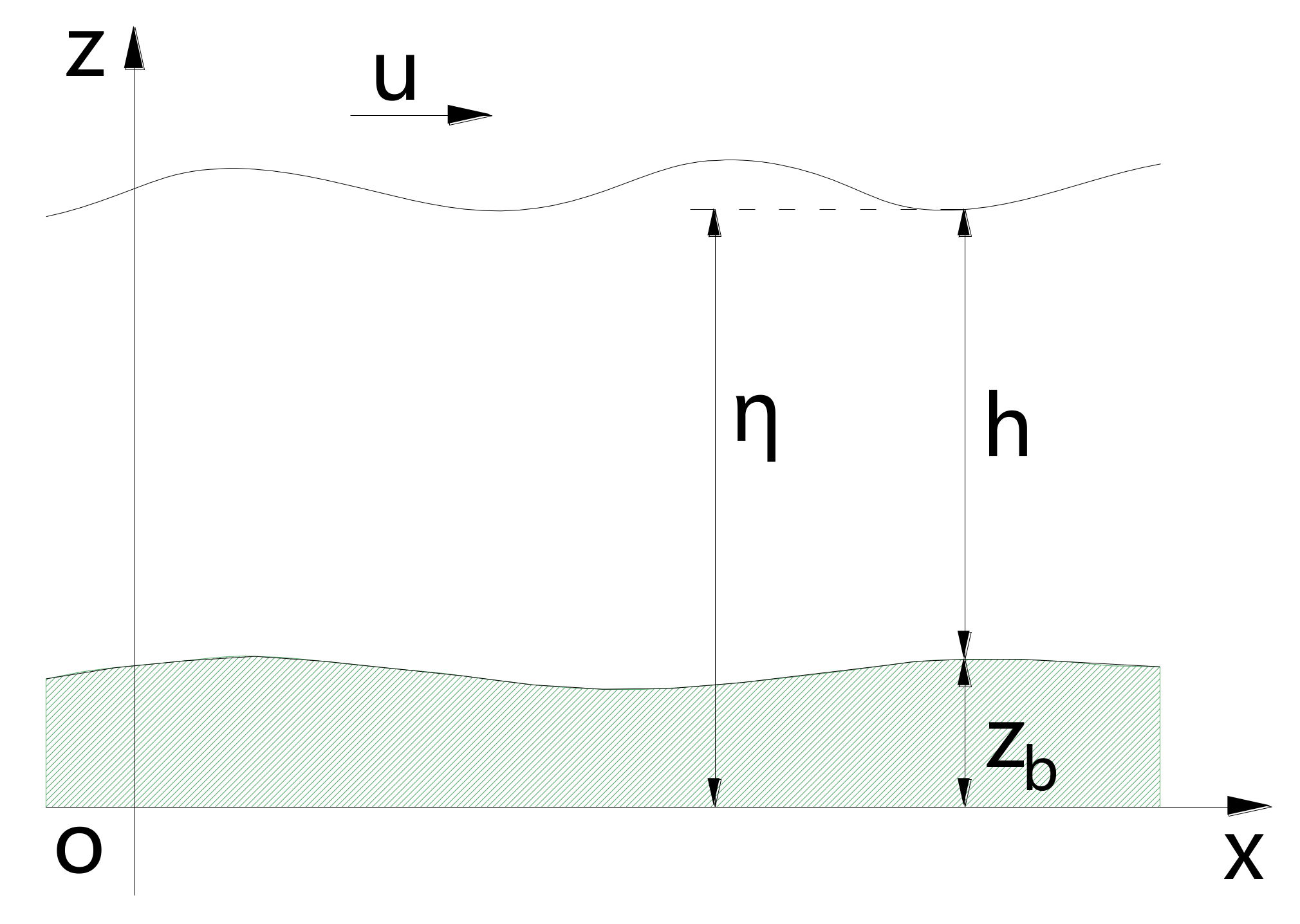
2. Governing Equations
3. Numerical Method
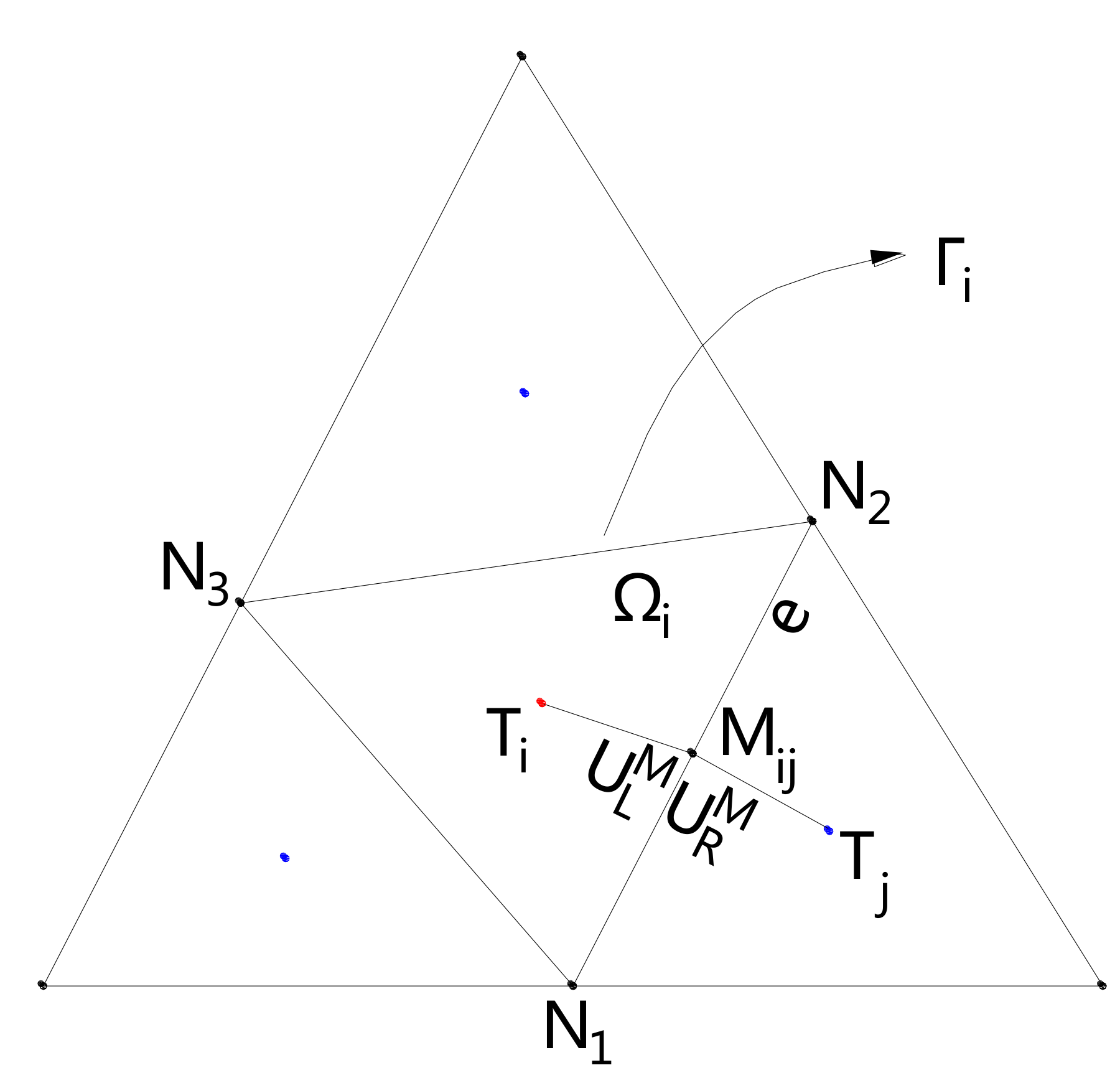
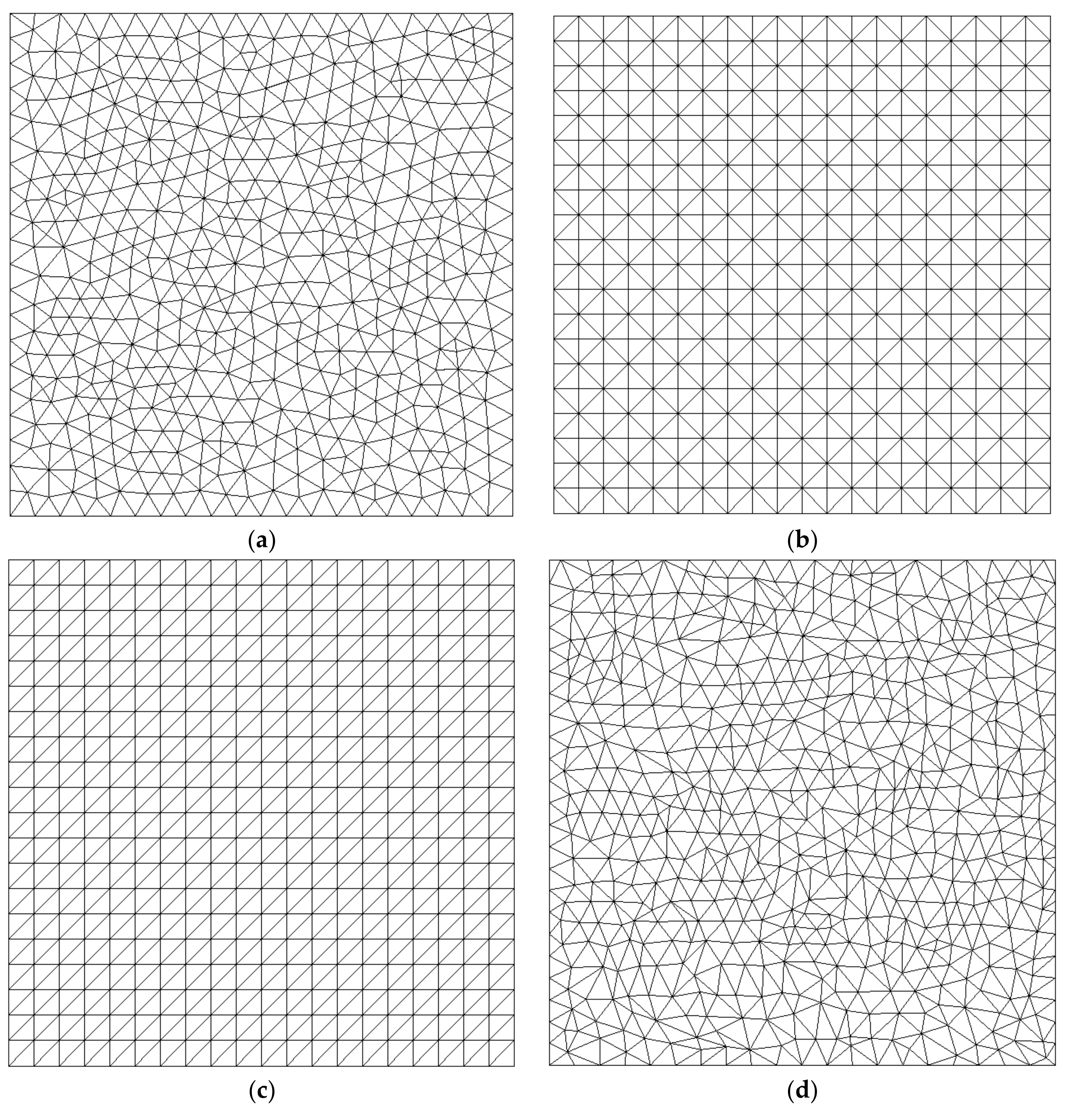
3.1. FVM on Triangular Grids
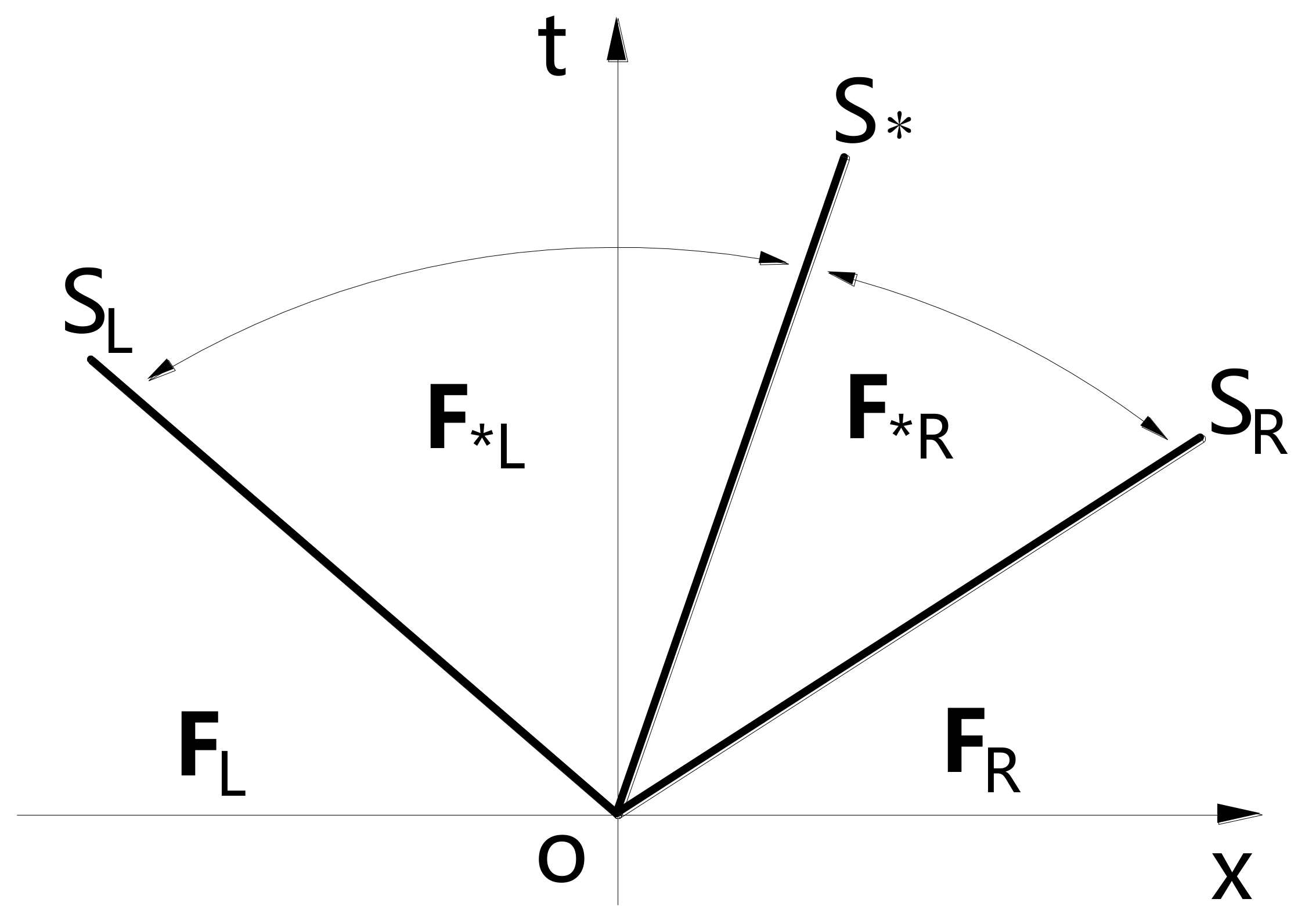
3.2. Approximated Riemann Solver
3.3. Treatment of Source Term
3.4. Time Integration Scheme
Stability Criteria
3.5. Second-Order Spatial Reconstructing and Limiting Method
3.5.1. A Review of Monoslope MUSCL Scheme
3.5.2. Review of Multislope MUSCL Scheme
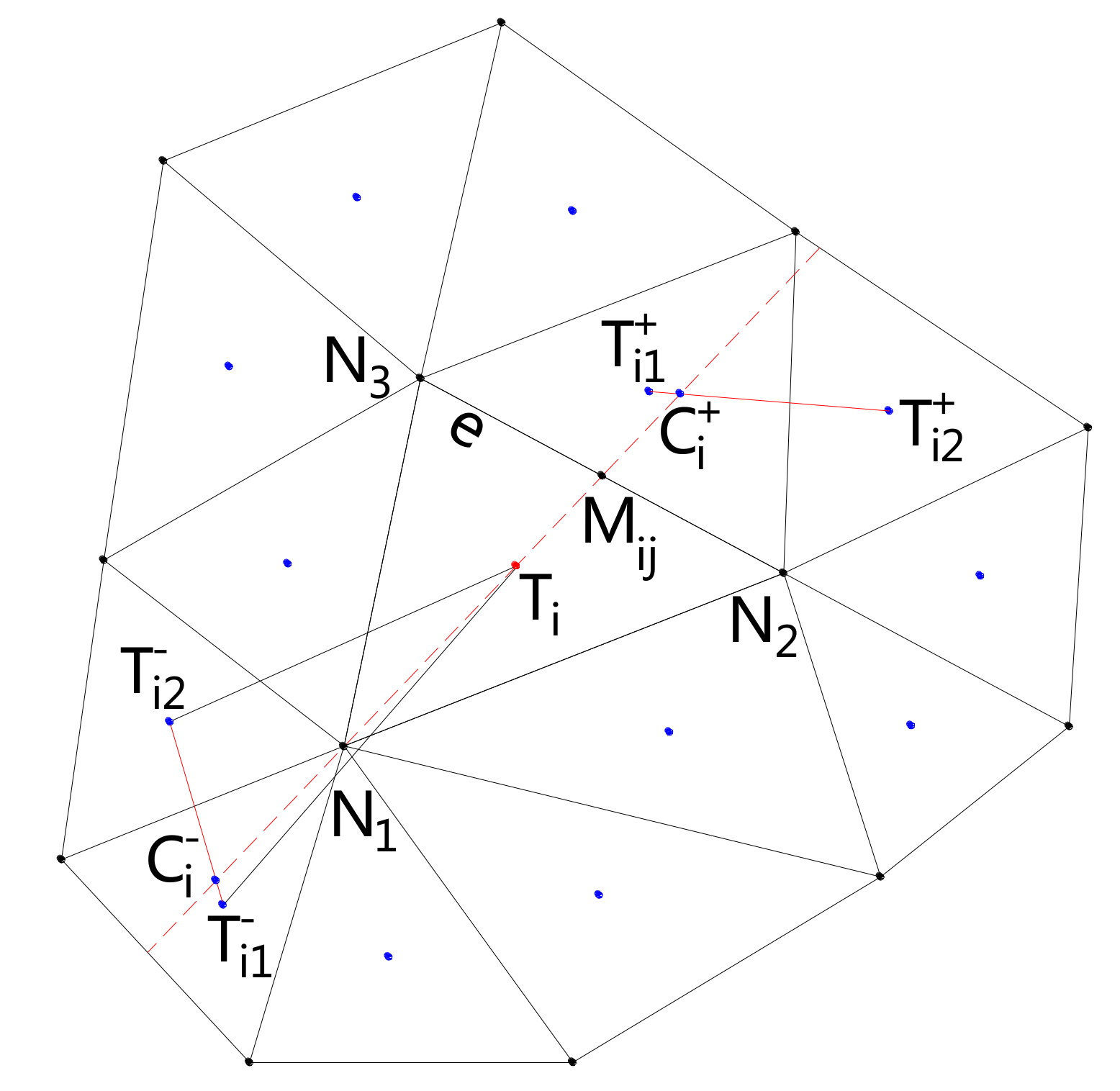
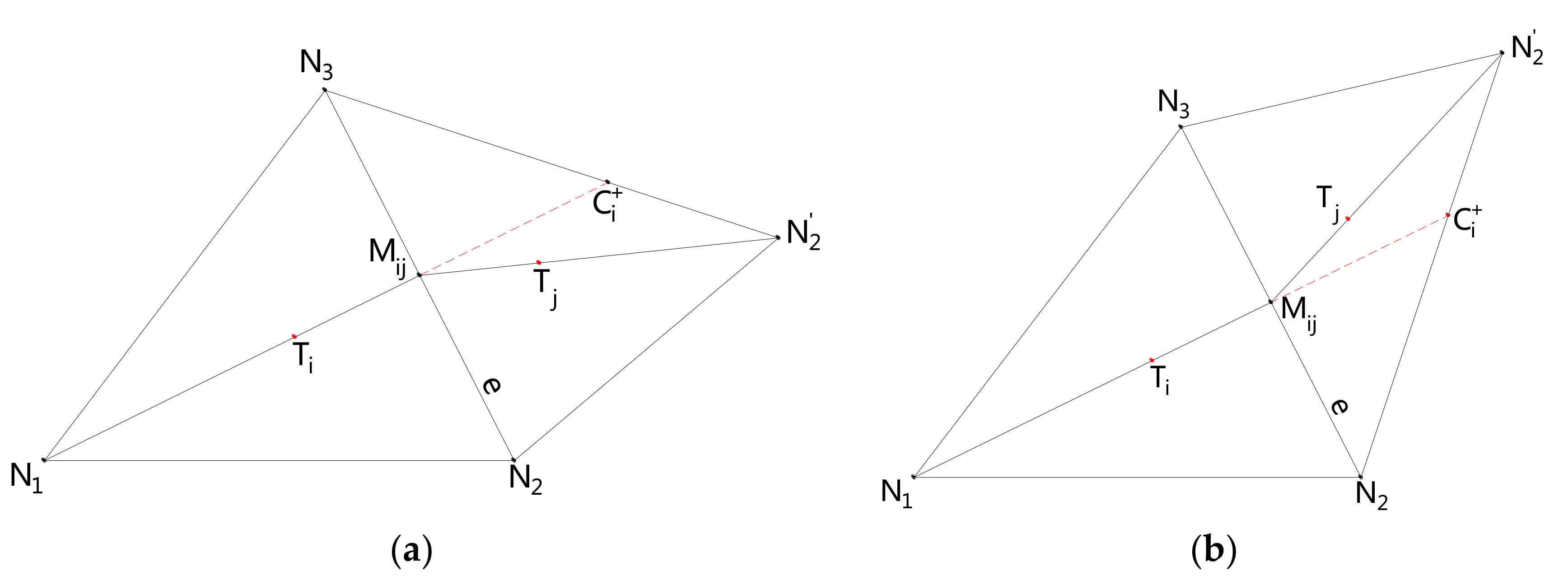
3.5.3. A Novel Multislope MUSCL Scheme
3.6. Treatment of the Wet-Dry Interface
3.7. Boundary Conditions
3.7.1. Liquid Boundary
3.7.2. Solid Boundary
4. Verification and Application
4.1. Stationary Flow with Wet-Dry Interface
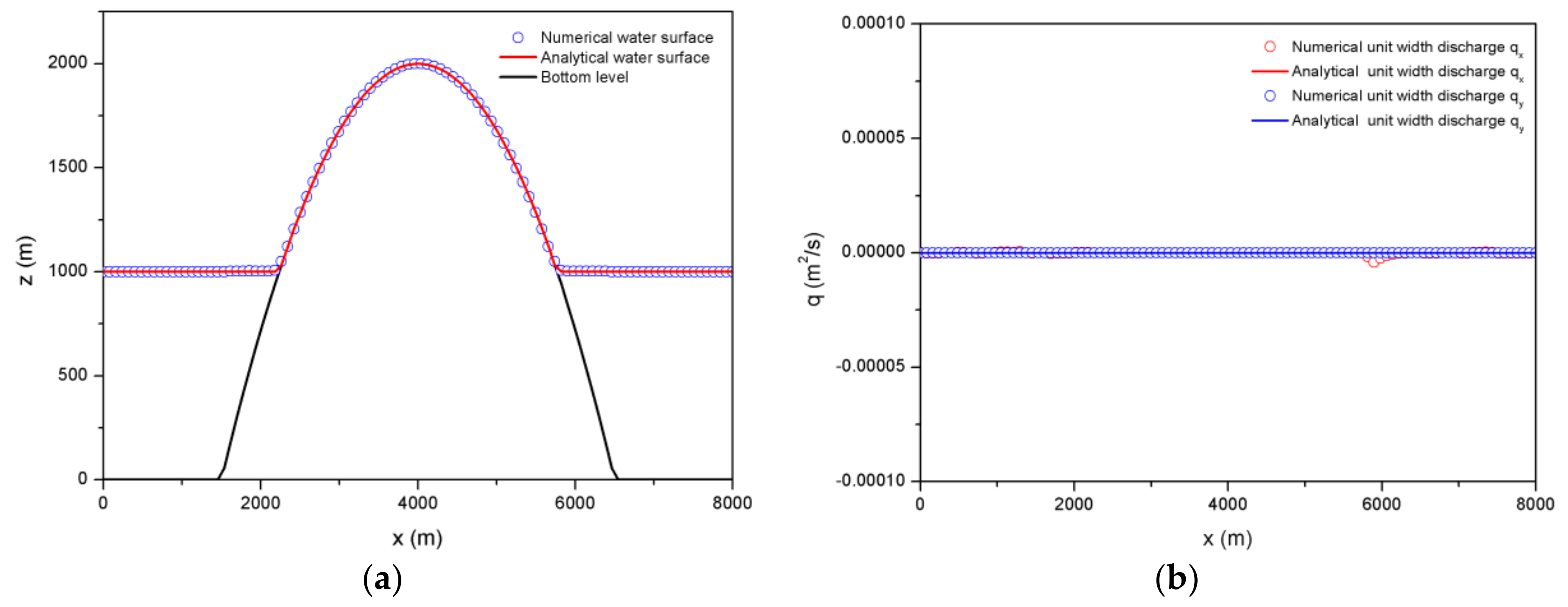
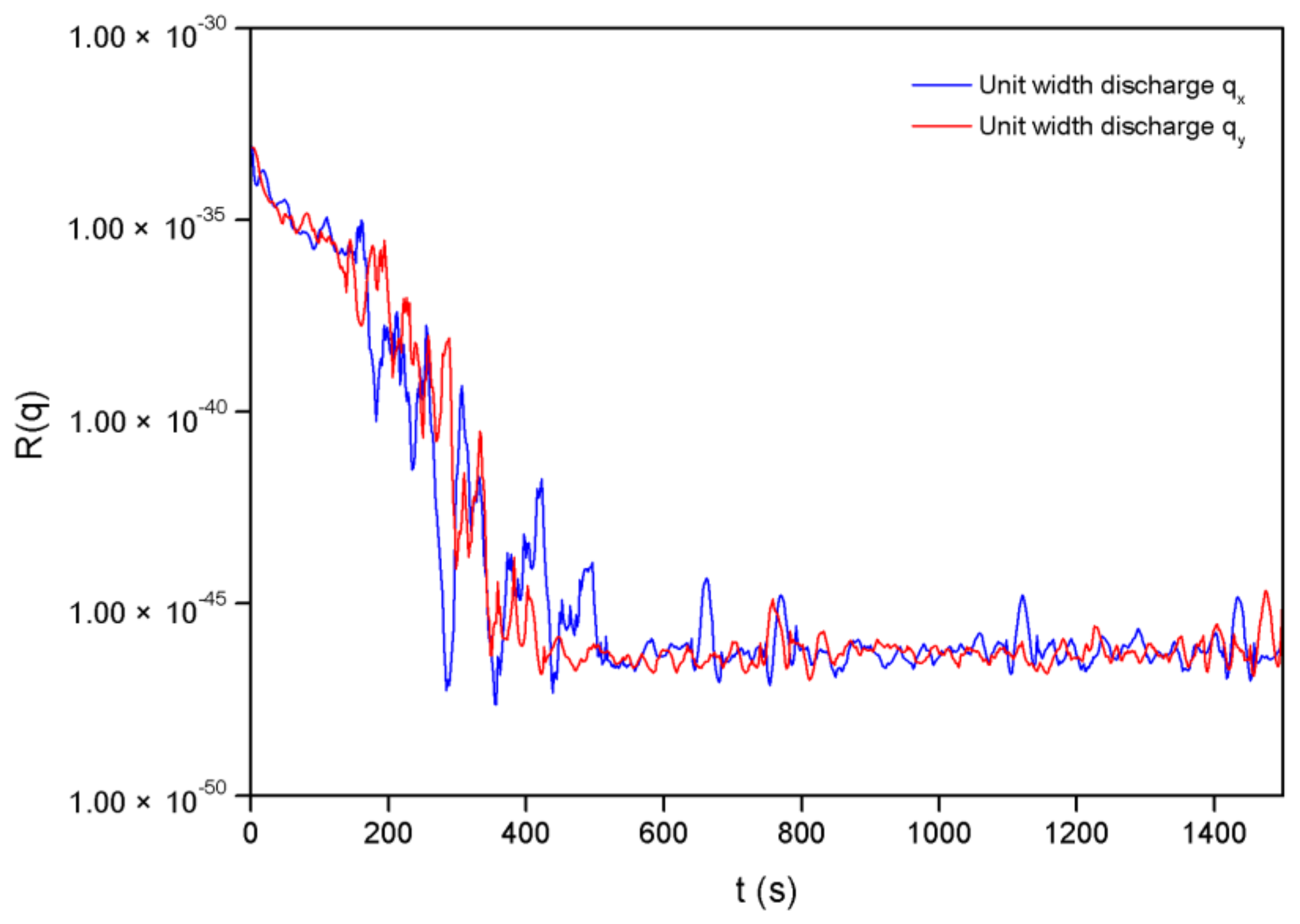
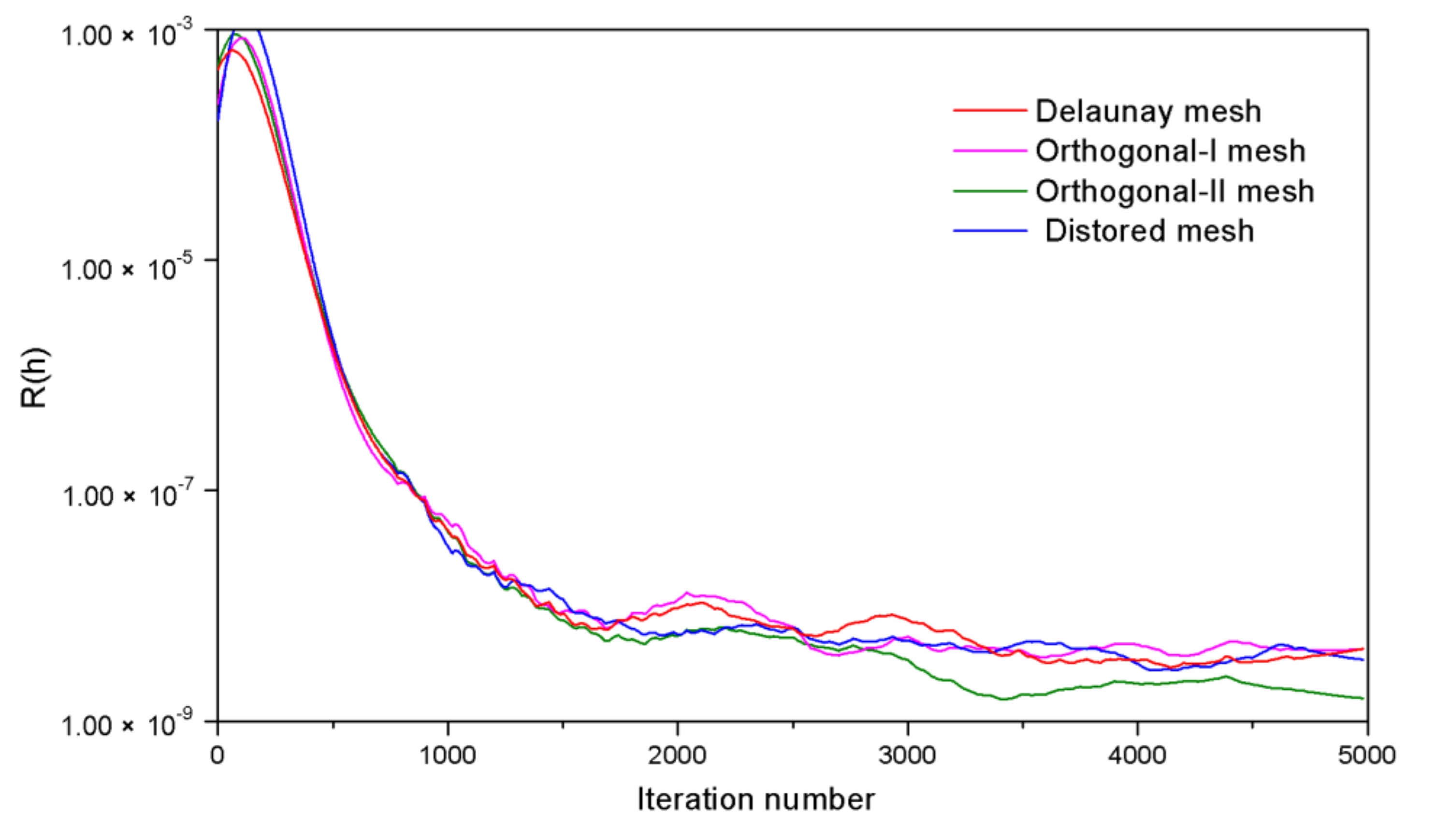
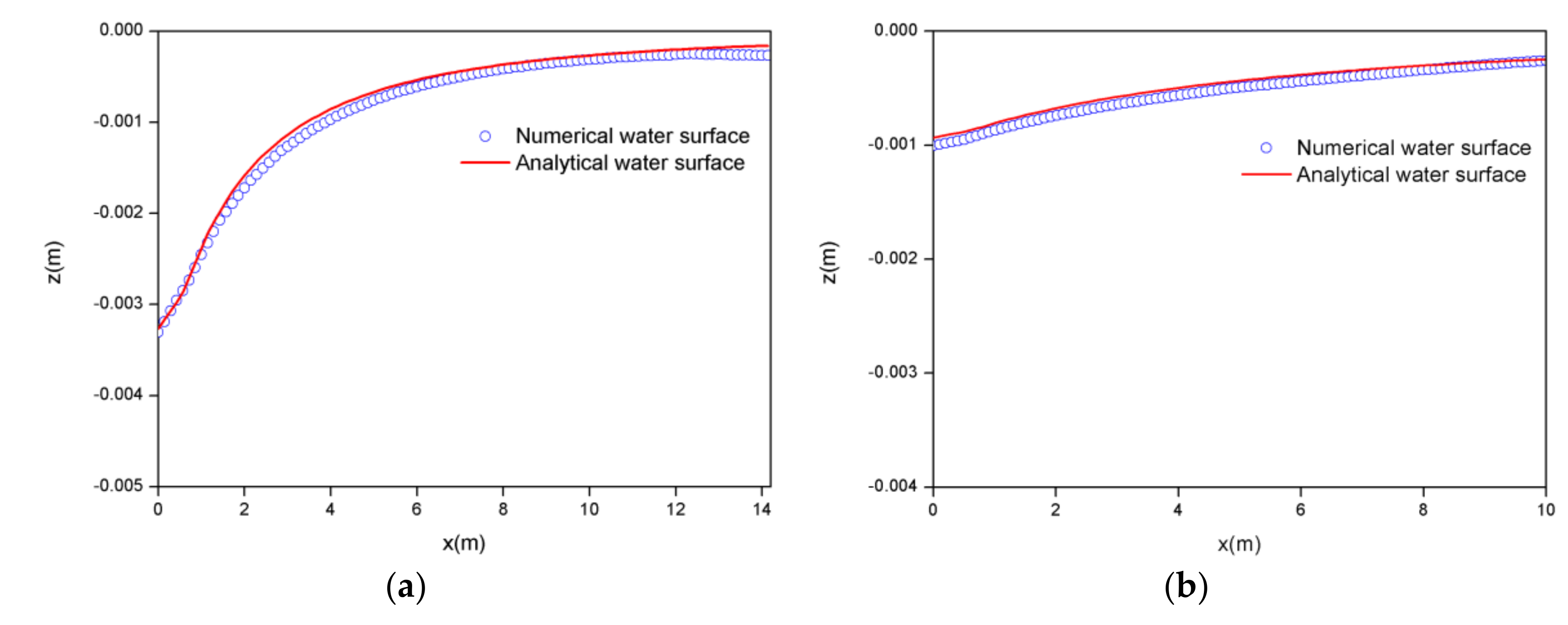
4.2. Potential Flow over Uneven Bottom
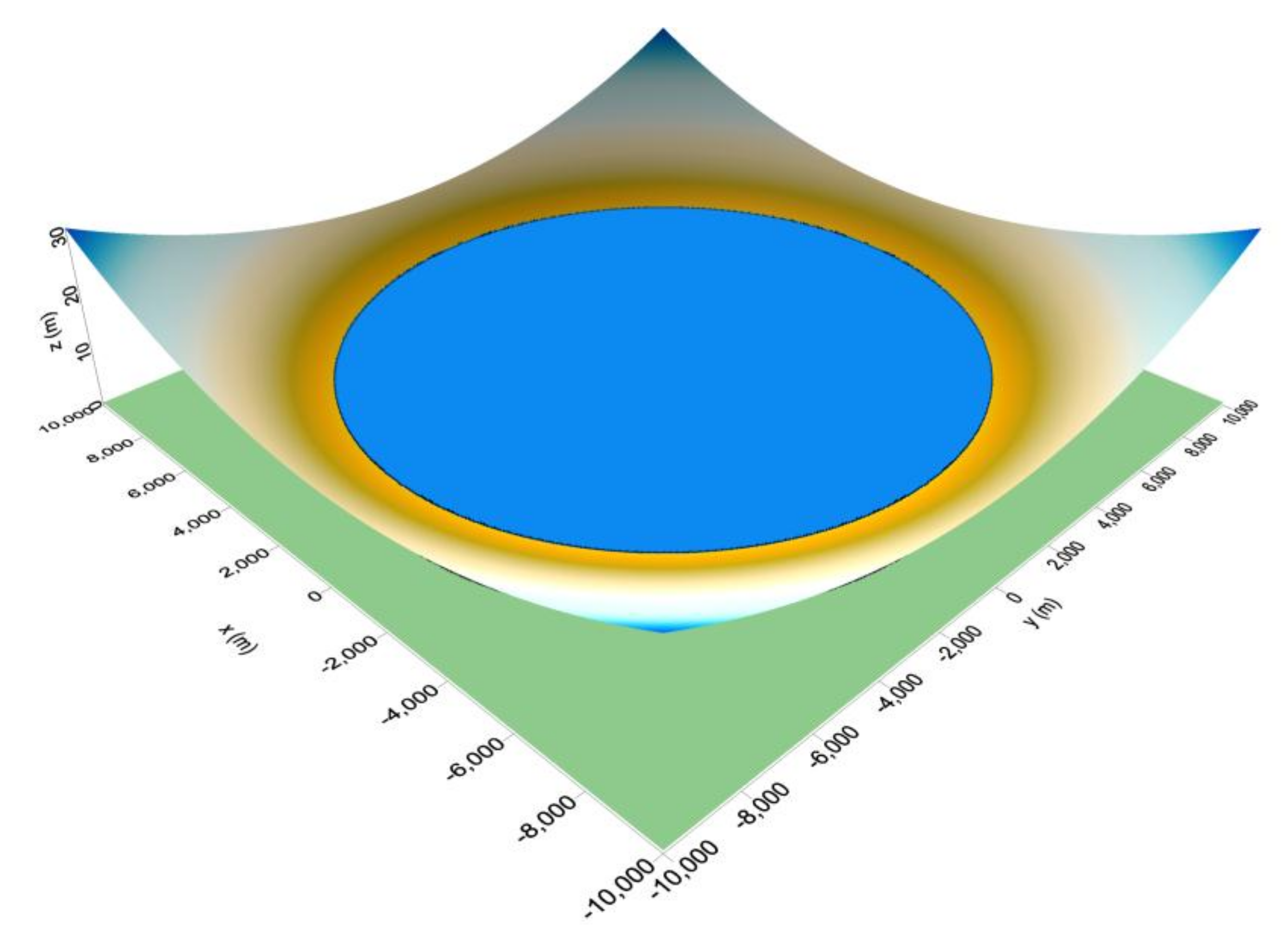
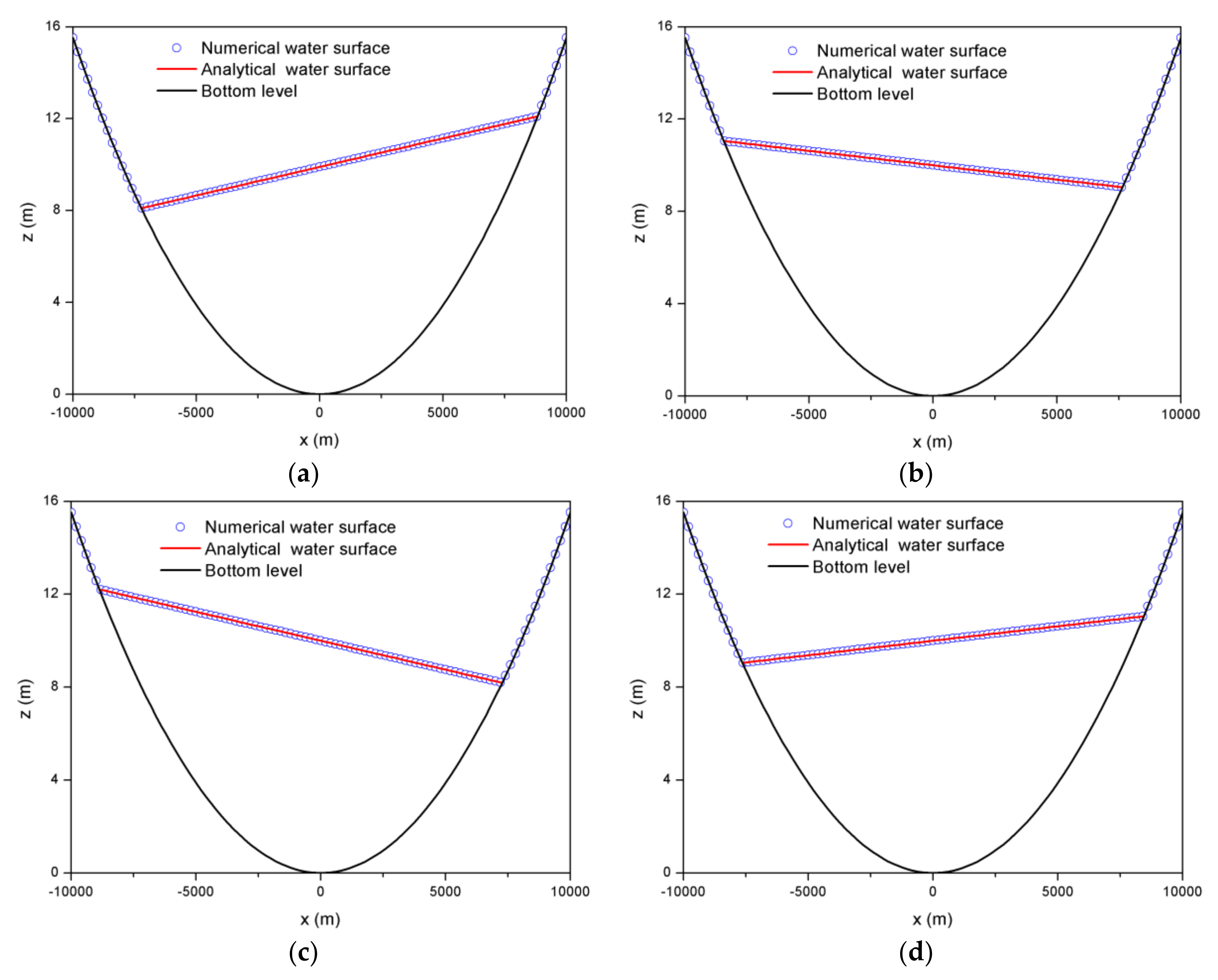
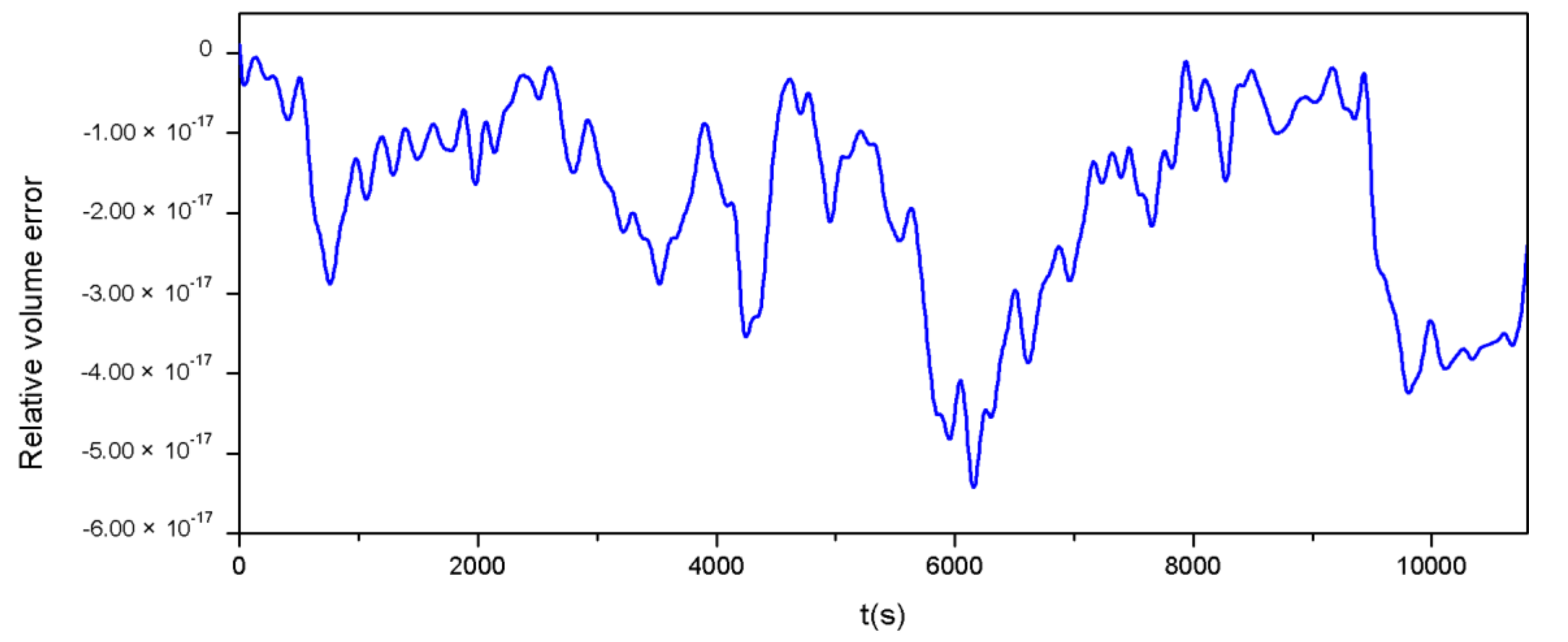
4.3. Water Sloshing in a Parabolic Basin
4.4. Steady Flow over Frictional Uneven Bottom
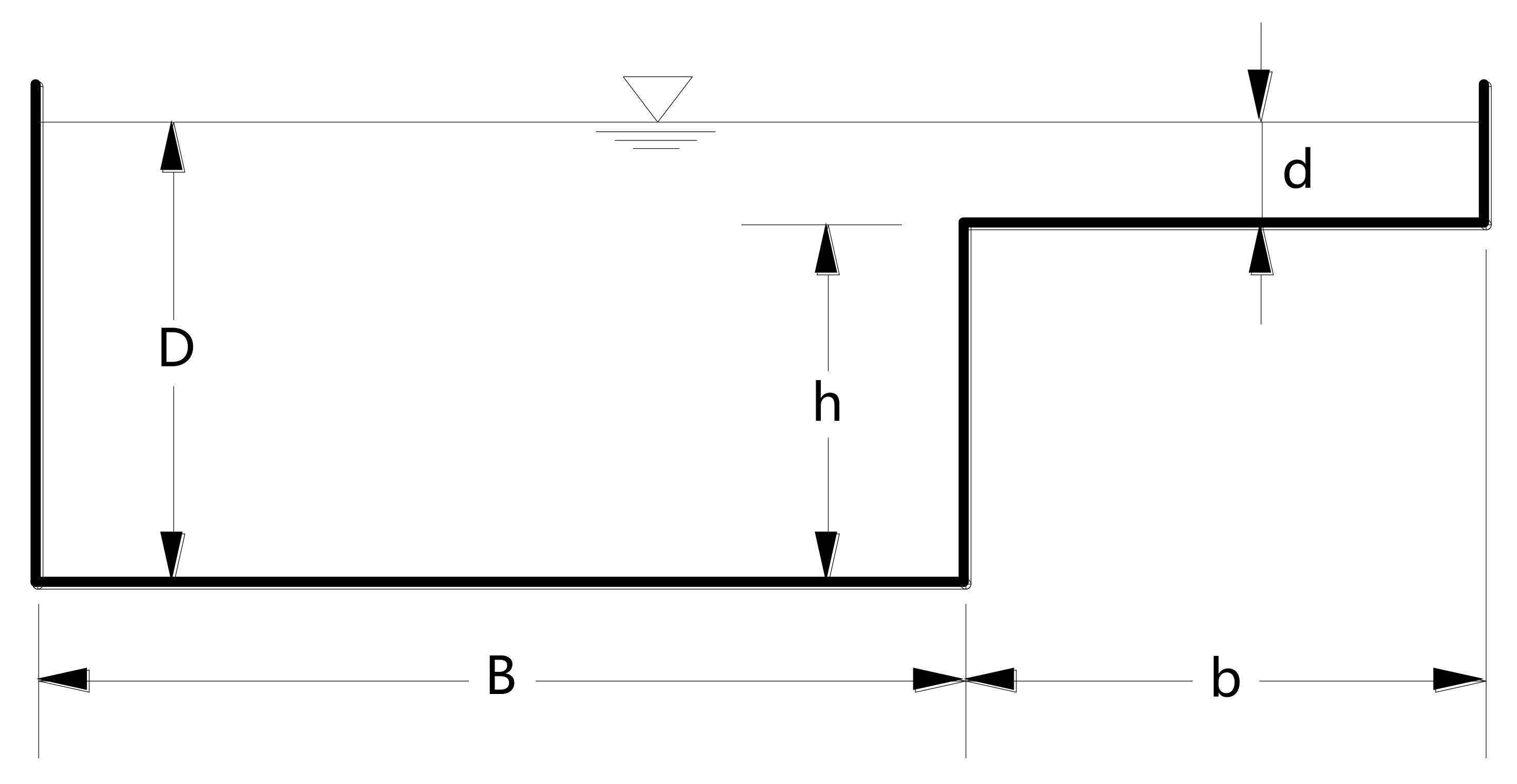
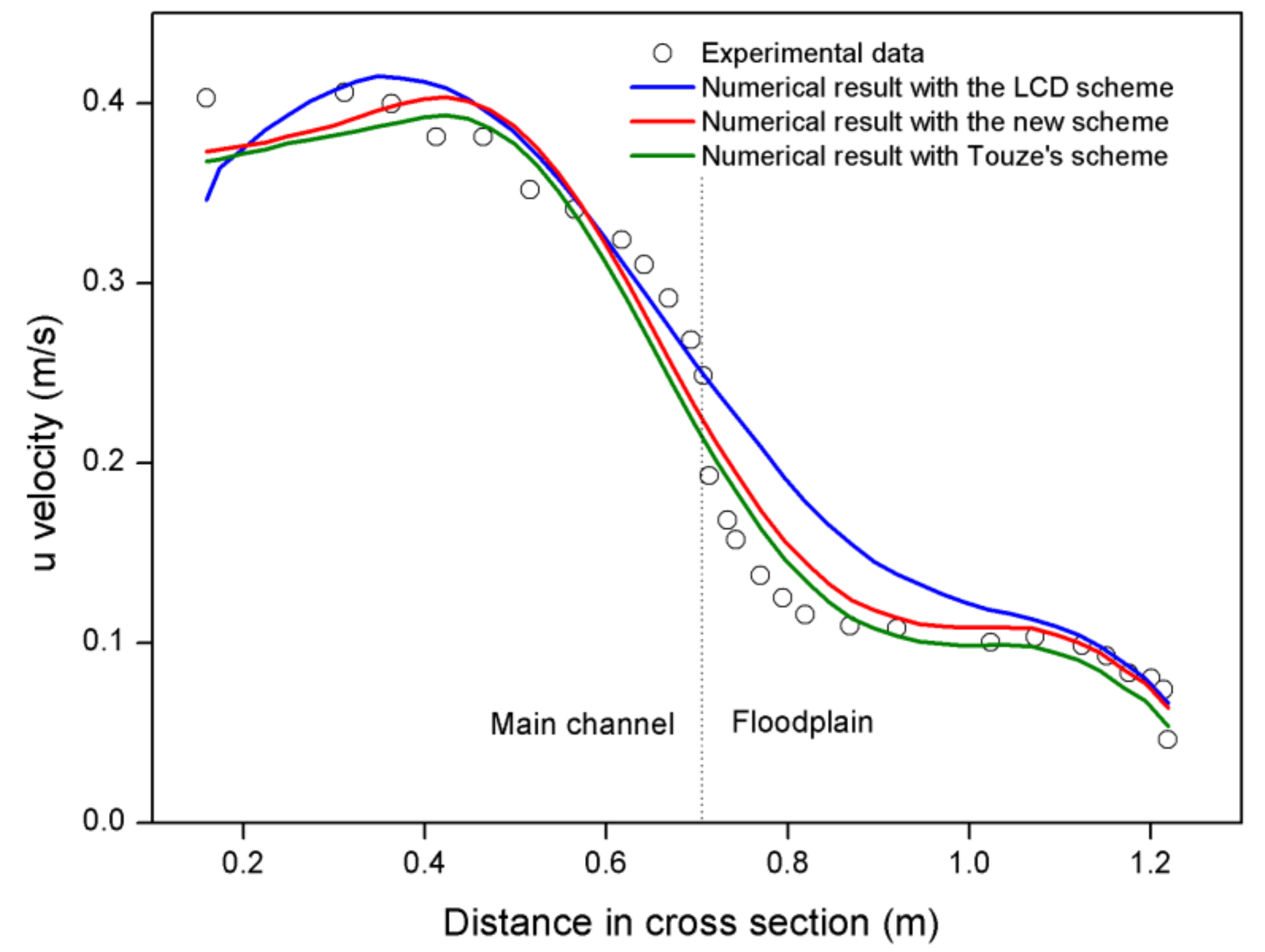
4.5. Flow in a Compound Channel
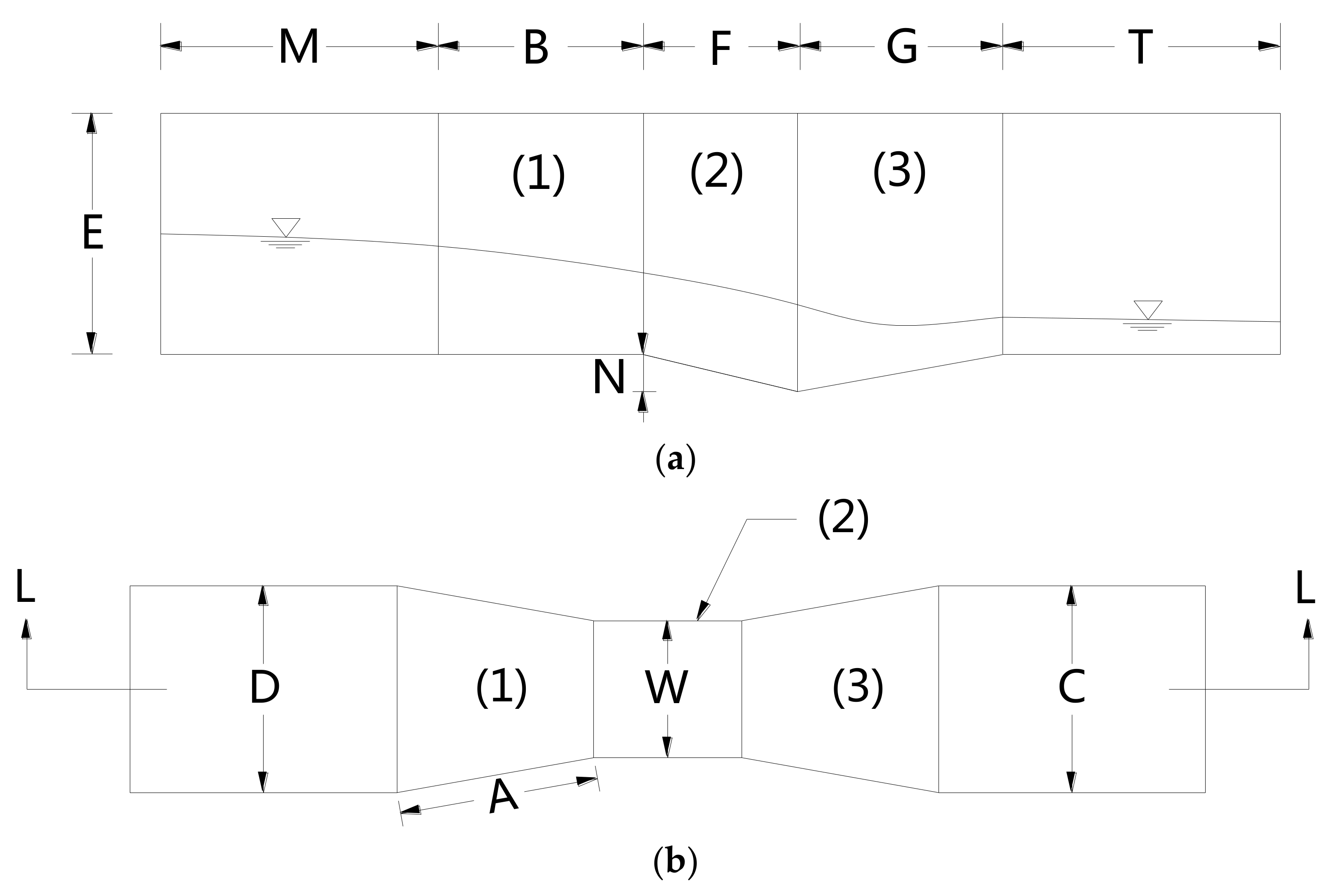
4.6. Flow in a Contracting-Expanding Channel over Uneven Bottom
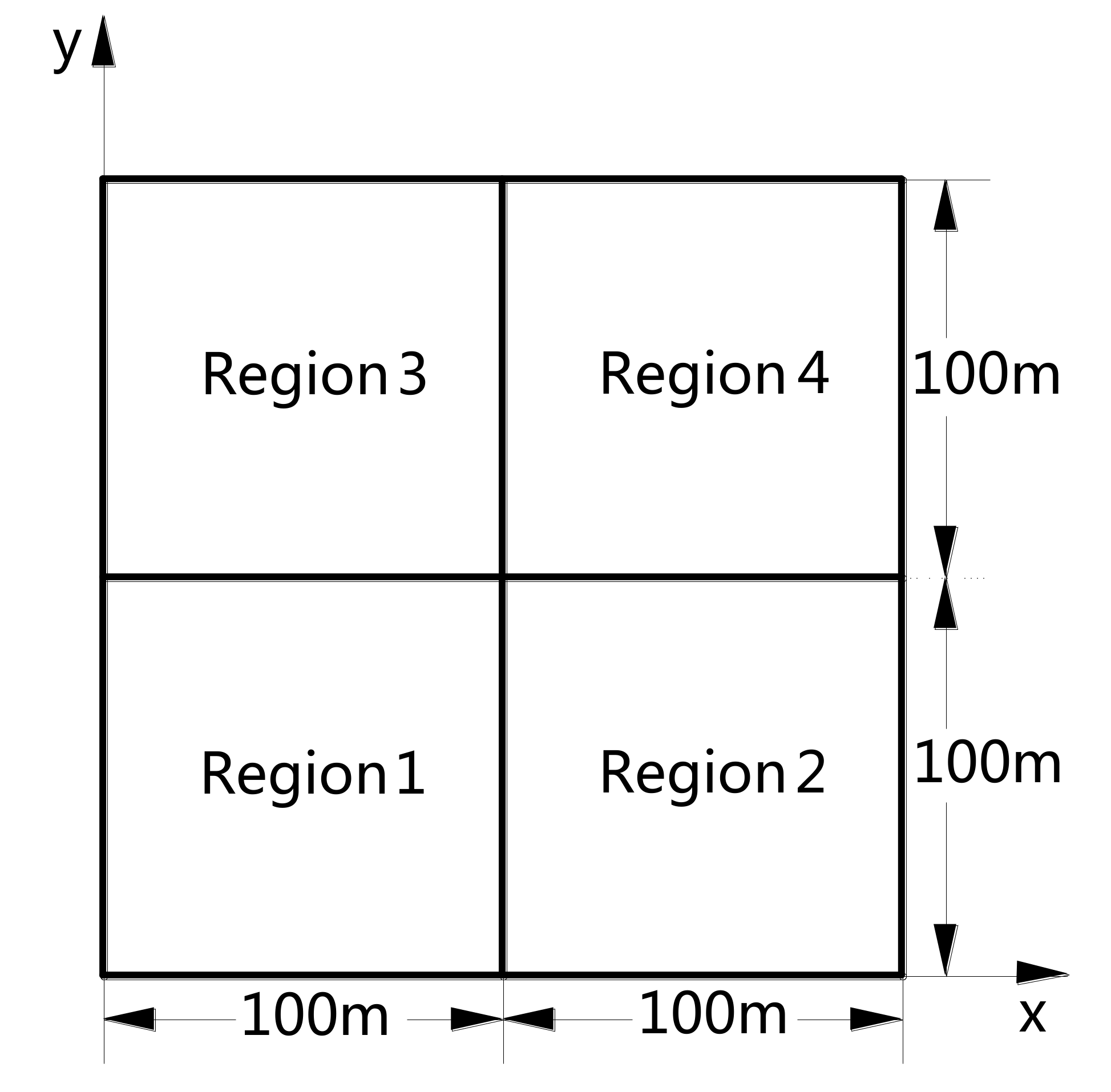
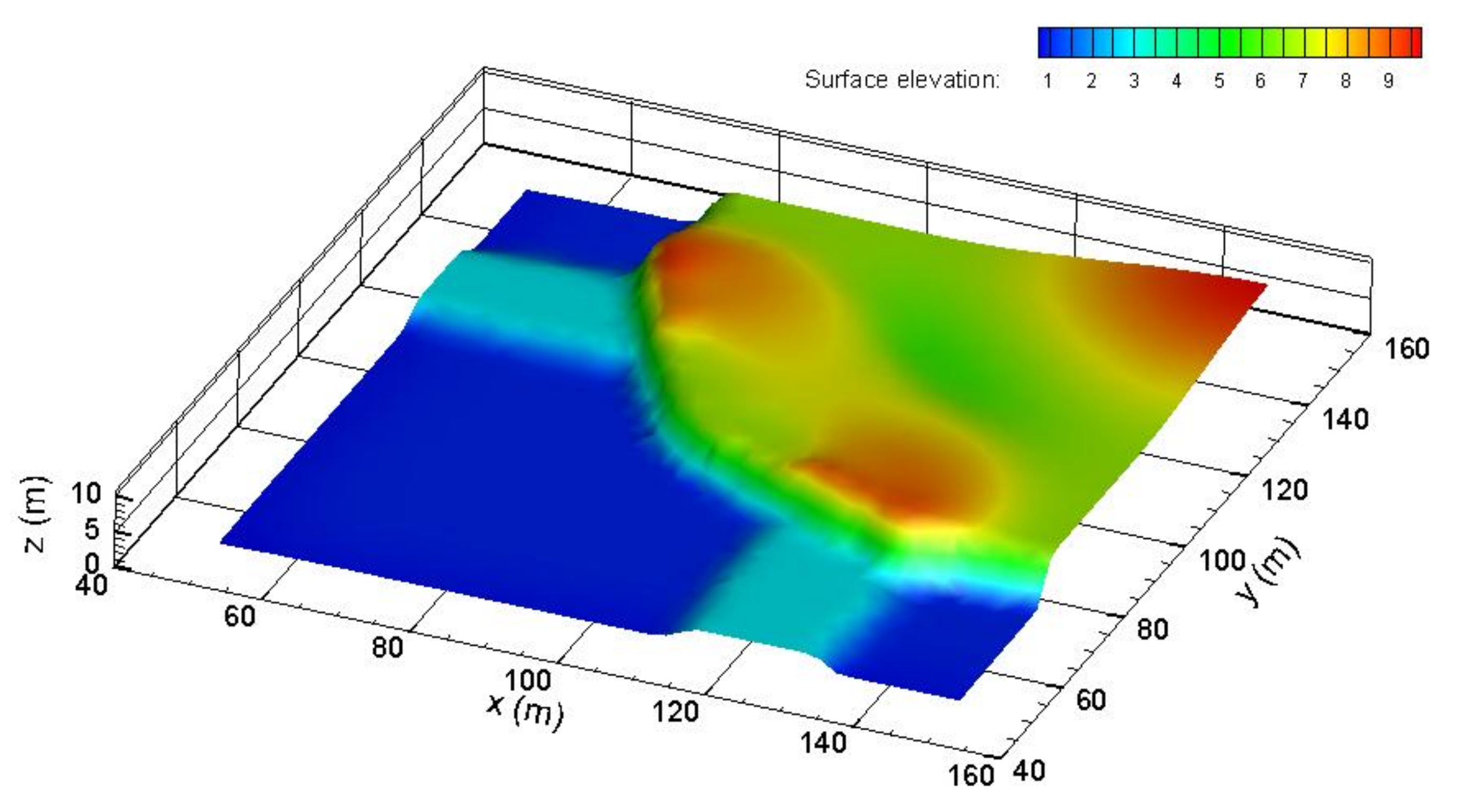
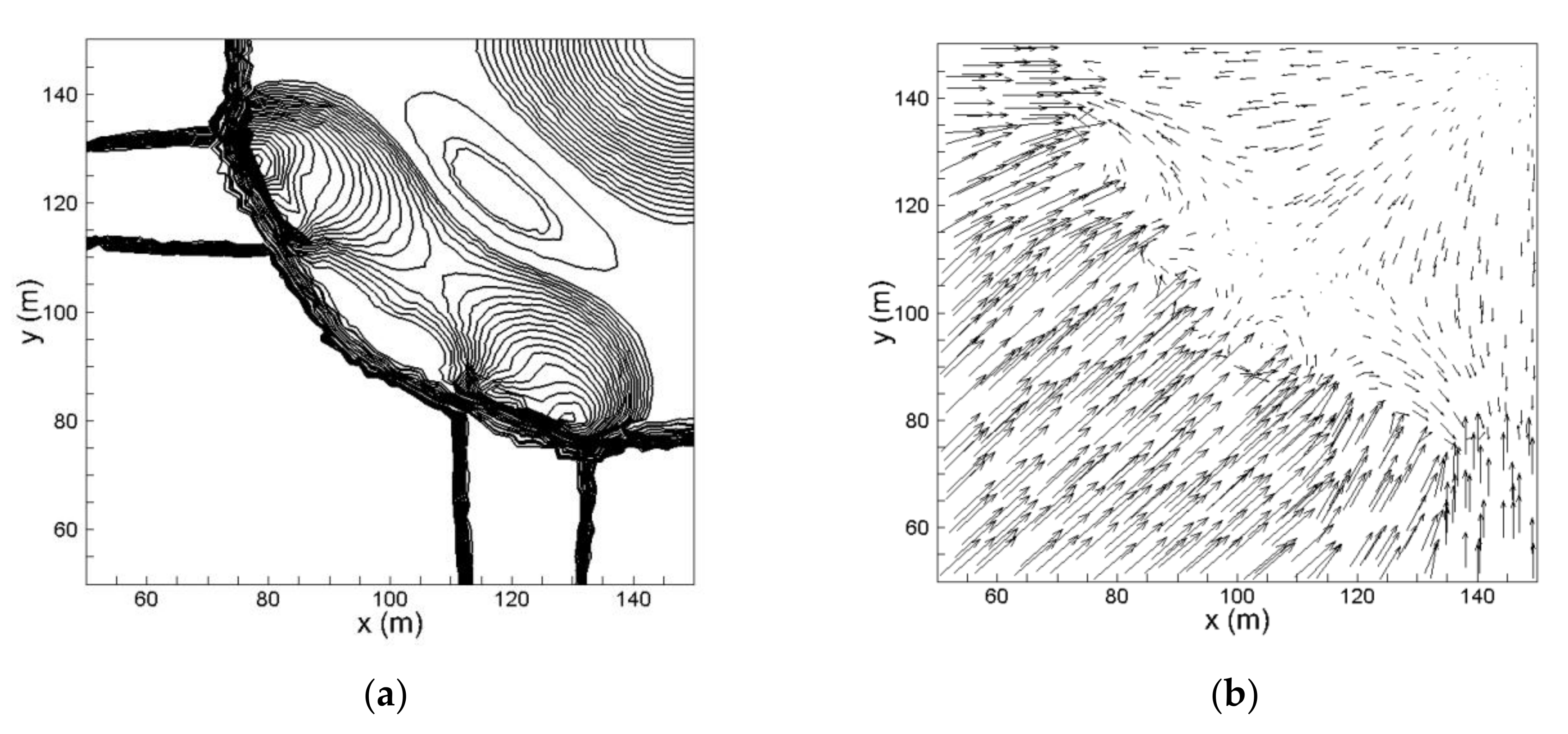
4.7. A Symmetric 2D Riemann Problem
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Thacker, W.C. Some exact solutions to the nonlinear shallow-water wave equations. J. Fluid Mech. 1981, 107, 499–508. [Google Scholar] [CrossRef]
- Zoppou, C.; Roberts, S. Explicit schemes for dam-break simulations. J. Hydraul. Eng. 2003, 129, 11–34. [Google Scholar] [CrossRef]
- Xing, Y.; Shu, C.-W. High order finite difference WENO schemes with the exact conservation property for the shallow water equations. J. Comput. Phys. 2005, 208, 206–227. [Google Scholar] [CrossRef]
- Liang, S.-J.; Tang, J.-H.; Wu, M.-S. Solution of shallow-water equations using least-squares finite-element method. Acta Mech. Sin. 2008, 24, 523–532. [Google Scholar] [CrossRef]
- Nikolos, I.K.; Delis, A.I. An unstructured node-centered finite volume scheme for shallow water flows with wet/dry fronts over complex topography. Comput. Methods Appl. Mech. Eng. 2009, 198, 3723–3750. [Google Scholar] [CrossRef]
- Nair, R.D.; Thomas, S.J.; Loft, R.D. A discontinuous Galerkin global shallow water model. Mon. Weather Rev. 2005, 133, 876–888. [Google Scholar] [CrossRef]
- Delis, A.I.; Nikolos, I.K.; Kazolea, M. Performance and comparison of cell-centered and node-centered unstructured finite volume discretizations for shallow water free surface flows. Arch. Comput. Methods Eng. 2011, 18, 57–118. [Google Scholar] [CrossRef]
- Godunov, S.K. A difference method for numerical calculation of discontinuous solutions of the equations of hydrodynamics. Mat. Sb. 1959, 89, 271–306. [Google Scholar]
- Rogers, B.D.; Borthwick, A.G.; Taylor, P.H. Mathematical balancing of flux gradient and source terms prior to using Roe’s approximate Riemann solver. J. Comput. Phys. 2003, 192, 422–451. [Google Scholar] [CrossRef]
- Hou, J.; Liang, Q.; Zhang, H.; Hinkelmann, R. An efficient unstructured MUSCL scheme for solving the 2D shallow water equations. Environ. Model. Softw. 2015, 66, 131–152. [Google Scholar] [CrossRef]
- Barth, T.; Jespersen, D. The design and application of upwind schemes on unstructured meshes. In Proceedings of the 27th Aerospace Sciences Meeting, Reno, NV, USA, 9–12 January 1989. [Google Scholar]
- Evangelista, S.; Greco, M.; Leopardi, A.; Vacca, A. A new algorithm for bank-failure mechanisms in 2D morphodynamic models with unstructured grids. Int. J. Sediment Res. 2015, 30, 382–391. [Google Scholar] [CrossRef]
- Evangelista, S.; Greco, M.; Leopardi, A. Numerical modeling of geomorphic processes in the presence of slope failures. In Proceedings of the 36th IAHR World Congress, Delft-Le Hague, The Netherlands, 28 June–3 July 2015. [Google Scholar]
- Audusse, E.; Bouchut, F.; Bristeau, M.-O.; Klein, R.; Perthame, B. A fast and stable well-balanced scheme with hydrostatic reconstruction for shallow water flows. SIAM J. Sci. Comput. 2004, 25, 2050–2065. [Google Scholar] [CrossRef]
- Audusse, E.; Bristeau, M.-O. A well-balanced positivity preserving “second-order” scheme for shallow water flows on unstructured meshes. J. Comput. Phys. 2005, 206, 311–333. [Google Scholar] [CrossRef]
- Bradford, S.F.; Sanders, B.F. Finite-volume model for shallow-water flooding of arbitrary topography. J. Hydraul. Eng. 2002, 128, 289–298. [Google Scholar] [CrossRef]
- Delis, A.I.; Nikolos, I.K. A novel multidimensional solution reconstruction and edge-based limiting procedure for unstructured cell-centered finite volumes with application to shallow water dynamics. Int. J. Numer. Meth. Fluids 2013, 71, 584–633. [Google Scholar] [CrossRef]
- Liang, Q. Flood simulation using a well-balanced shallow flow model. J. Hydraul. Eng. 2010, 136, 669–675. [Google Scholar] [CrossRef]
- Liang, Q.; Borthwick, A.G. Adaptive quadtree simulation of shallow flows with wet–dry fronts over complex topography. Comput. Fluids 2009, 38, 221–234. [Google Scholar] [CrossRef]
- Liang, Q.; Marche, F. Numerical resolution of well-balanced shallow water equations with complex source terms. Adv. Water Resour. 2009, 32, 873–884. [Google Scholar] [CrossRef]
- Van Leer, B. Towards the ultimate conservative difference scheme. V. A second-order sequel to Godunov’s method. J. Comput. Phys. 1979, 32, 101–136. [Google Scholar] [CrossRef]
- Buffard, T.; Clain, S. Monoslope and multislope MUSCL methods for unstructured meshes. J. Comput. Phys. 2010, 229, 3745–3776. [Google Scholar] [CrossRef] [Green Version]
- Kong, J.; Xin, P.; Shen, C.-J.; Song, Z.-Y.; Li, L. A high-resolution method for the depth-integrated solute transport equation based on an unstructured mesh. Environ. Model. Softw. 2013, 40, 109–127. [Google Scholar] [CrossRef]
- Zhang, D.; Jiang, C.; Cheng, L.; Liang, D. A refined r-factor algorithm for TVD schemes on arbitrary unstructured meshes. Int. J. Numer. Meth. Fluids 2016, 80, 105–139. [Google Scholar] [CrossRef] [Green Version]
- Van Leer, B. Towards the ultimate conservative difference scheme. IV. A new approach to numerical convection. J. Comput. Phys. 1977, 23, 276–299. [Google Scholar] [CrossRef]
- Van Albada, G.D.; Van Leer, B.; Roberts, W.W., Jr. A comparative study of computational methods in cosmic gas dynamics. Astron. Astrophys. 1982, 108, 76–84. [Google Scholar]
- Hubbard, M.E. Multidimensional slope limiters for MUSCL-type finite volume schemes on unstructured grids. J. Comput. Phys. 1999, 155, 54–74. [Google Scholar] [CrossRef]
- Davies, G. A well-balanced discretization for a shallow water inundation model. In Proceedings of the 19th International Congress on Modelling and Simulation (MODSIM), Perth, Australia, 12–16 December 2011; pp. 2824–2830. [Google Scholar]
- Toro, E.F.; Spruce, M.; Speares, W. Restoration of the contact surface in the HLL-Riemann solver. Shock Waves 1994, 4, 25–34. [Google Scholar] [CrossRef]
- George, D.L. Augmented Riemann solvers for the shallow water equations over variable topography with steady states and inundation. J. Comput. Phys. 2008, 227, 3089–3113. [Google Scholar] [CrossRef]
- Toro, E.F. Shock-Capturing Methods for Free-Surface Shallow Flows; Wiley: Chichester, UK, 2001. [Google Scholar]
- Harten, A.; Lax, P.D.; van Leer, B. On upstream differencing and Godunov-type schemes for hyperbolic conservation laws. SIAM Rev. 1983, 25, 35–61. [Google Scholar] [CrossRef]
- Hou, J.; Liang, Q.; Simons, F.; Hinkelmann, R. A 2D well-balanced shallow flow model for unstructured grids with novel slope source term treatment. Adv. Water Resour. 2013, 52, 107–131. [Google Scholar] [CrossRef]
- Le Touze, C.; Murrone, A.; Guillard, H. Multislope MUSCL method for general unstructured meshes. J. Comput. Phys. 2015, 284, 389–418. [Google Scholar] [CrossRef] [Green Version]
- Hou, J.; Liang, Q.; Zhang, H.; Hinkelmann, R. Multislope MUSCL method applied to solve shallow water equations. Comput. Math. Appl. 2014, 68, 2012–2027. [Google Scholar] [CrossRef]
- Barth, T.J.; Frederickson, P.O. Higher order solution of the Euler equations on unstructured grids using quadratic reconstruction. In Proceedings of the 28th AIAA Aerospace Sciences Meeting, Reno, NV, USA, 8–11 January 1990. [Google Scholar]
- Yoon, T.H.; Kang, S.-K. Finite volume model for two-dimensional shallow water flows on unstructured grids. J. Hydraul. Eng. 2004, 130, 678–688. [Google Scholar] [CrossRef]
- Park, J.S.; Yoon, S.-H.; Kim, C. Multi-dimensional limiting process for hyperbolic conservation laws on unstructured grids. J. Comput. Phys. 2010, 229, 788–812. [Google Scholar] [CrossRef]
- Venkatakrishnan, V. On the accuracy of limiters and convergence to steady state solutions. In Proceedings of the 31st Aerospace Sciences Meeting & Exhibit, Reno, NV, USA, 11–14 January 1993. [Google Scholar]
- Begnudelli, L.; Sanders, B.F. Unstructured grid finite-volume algorithm for shallow-water flow and scalar transport with wetting and drying. J. Hydraul. Eng. 2006, 132, 371–384. [Google Scholar] [CrossRef]
- Brufau, P.; García-Navarro, P.; Vázquez-Cendón, M.E. Zero mass error using unsteady wetting–drying conditions in shallow flows over dry irregular topography. Int. J. Numer. Meth. Fluids 2004, 45, 1047–1082. [Google Scholar] [CrossRef]
- Brufau, P.; Vázquez-Cendón, M.E.; García-Navarro, P. A numerical model for the flooding and drying of irregular domains. Int. J. Numer. Meth. Fluids 2002, 39, 247–275. [Google Scholar] [CrossRef]
- Kuiry, S.N.; Pramanik, K.; Sen, D. Finite volume model for shallow water equations with improved treatment of source terms. J. Hydraul. Eng. 2008, 134, 231–242. [Google Scholar] [CrossRef]
- Hou, J.; Simons, F.; Mahgoub, M.; Hinkelmann, R. A robust well-balanced model on unstructured grids for shallow water flows with wetting and drying over complex topography. Comput. Methods Appl. Mech. Eng. 2013, 257, 126–149. [Google Scholar] [CrossRef]
- Zhou, J.G.; Causon, D.M.; Mingham, C.G.; Ingram, D.M. The surface gradient method for the treatment of source terms in the shallow-water equations. J. Comput. Phys. 2001, 168, 1–25. [Google Scholar] [CrossRef]
- Ricchiuto, M.; Abgrall, R.; Deconinck, H. Application of conservative residual distribution schemes to the solution of the shallow water equations on unstructured meshes. J. Comput. Phys. 2007, 222, 287–331. [Google Scholar] [CrossRef]
- Gallardo, J.M.; Parés, C.; Castro, M. On a well-balanced high-order finite volume scheme for shallow water equations with topography and dry areas. J. Comput. Phys. 2007, 227, 574–601. [Google Scholar] [CrossRef]
- Marche, F.; Bonneton, P.; Fabrie, P.; Seguin, N. Evaluation of well-balanced bore-capturing schemes for 2D wetting and drying processes. Int. J. Numer. Meth. Fluids 2007, 53, 867–894. [Google Scholar] [CrossRef]
- Sampson, J.; Easton, A.; Singh, M. Moving boundary shallow water flow in circular paraboloidal basins. In Proceedings of the Sixth Engineering Mathematics and Applications Conference, 5th International Congress on Industrial and Applied Mathematics, Sydney, Australia, 7–11 July 2003. [Google Scholar]
- Aricò, C.; Sinagra, M.; Tucciarelli, T. Anisotropic potential of velocity fields in real fluids: Application to the MAST solution of shallow water equations. Adv. Water Resour. 2013, 62, 13–36. [Google Scholar] [CrossRef] [Green Version]
- Murillo, J.; García-Navarro, P.; Burguete, J.; Brufau, P. The influence of source terms on stability, accuracy and conservation in two-dimensional shallow flow simulation using triangular finite volumes. Int. J. Numer. Meth. Fluids 2007, 54, 543–590. [Google Scholar] [CrossRef]
- Duran, A. A robust and well-balanced scheme for the 2D Saint-Venant system on unstructured meshes with friction source term. Int. J. Numer. Meth. Fluids 2015, 78, 89–121. [Google Scholar] [CrossRef]
- Rajaratnam, N.; Ahmadi, R. Hydraulics of channels with flood-plains. J. Hydraul. Res. 1981, 19, 43–60. [Google Scholar] [CrossRef]
- Liu, C.; Luo, X.; Liu, X.; Yang, K. Modeling depth-averaged velocity and bed shear stress in compound channels with emergent and submerged vegetation. Adv. Water Resour. 2013, 60, 148–159. [Google Scholar] [CrossRef]
- Shan, Y.; Liu, X.; Yang, K.; Liu, C. Analytical model for stage-discharge estimation in meandering compound channels with submerged flexible vegetation. Adv. Water Resour. 2017, 108, 170–183. [Google Scholar] [CrossRef]
- Ye, J.; McCorquodale, J.A. Depth-averaged hydrodynamic model in curvilinear collocated grid. J. Hydraul. Eng. 1997, 123, 380–388. [Google Scholar] [CrossRef]
- Brio, M.; Zakharian, A.R.; Webb, G.M. Two-dimensional Riemann solver for Euler equations of gas dynamics. J. Comput. Phys. 2001, 167, 177–195. [Google Scholar] [CrossRef]
- Guinot, V. Godunov-Type Schemes: An Introduction for Engineers; Elsevier: Amsterdam, The Netherlands, 2003. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D (cm) | d (cm) | h (cm) | B (cm) | b (cm) | Q (m3/s) | Sw × 103 | Fr |
|---|---|---|---|---|---|---|---|
| 11.28 | 1.52 | 9.75 | 71.1 | 50.8 | 0.027 | 0.45 | 0.37 |
| A (m) | B (m) | C (m) | D (m) | E (m) | F (m) | G (m) | M (m) | N (m) | T (m) | W (m) |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.389 | 0.381 | 0.305 | 0.305 | 0.267 | 0.152 | 0.483 | 2.54 | 0.086 | 0.889 | 0.152 |
| Region (#) | Coordinates (m) | Water Depth (m) | u (m/s) | v (m/s) |
|---|---|---|---|---|
| 1 | x ≤ 100, y ≤ 100 | 1 | 10 | 10 |
| 2 | x > 100, y ≤ 100 | 1 | 0 | 10 |
| 3 | x ≤ 100, y > 100 | 1 | 10 | 0 |
| 4 | x > 100, y > 100 | 10 | 0 | 0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Liu, X.; Li, F.; Huang, S.; Liu, C. A Novel Multislope MUSCL Scheme for Solving 2D Shallow Water Equations on Unstructured Grids. Water 2018, 10, 524. https://doi.org/10.3390/w10040524
Xu H, Liu X, Li F, Huang S, Liu C. A Novel Multislope MUSCL Scheme for Solving 2D Shallow Water Equations on Unstructured Grids. Water. 2018; 10(4):524. https://doi.org/10.3390/w10040524
Chicago/Turabian StyleXu, Haiyong, Xingnian Liu, Fujian Li, Sheng Huang, and Chao Liu. 2018. "A Novel Multislope MUSCL Scheme for Solving 2D Shallow Water Equations on Unstructured Grids" Water 10, no. 4: 524. https://doi.org/10.3390/w10040524
APA StyleXu, H., Liu, X., Li, F., Huang, S., & Liu, C. (2018). A Novel Multislope MUSCL Scheme for Solving 2D Shallow Water Equations on Unstructured Grids. Water, 10(4), 524. https://doi.org/10.3390/w10040524