Sediment Transport in Sewage Pressure Pipes, Part I: Continuous Determination of Settling and Erosion Characteristics by In-Situ TSS Monitoring Inside a Pressure Pipe in Northern Germany



Abstract
:1. Introduction
- Determine applicability and quality of an in-situ TSS-online measurement system inside a pressure pipe
- Characterize raw sewage erosion and sedimentation behavior under dry weather inflow continuously by TSS-online monitoring
- Identify mechanisms changing the transport behavior and characterize modified erosion and sedimentation
Literature Review
2. Materials and Methods
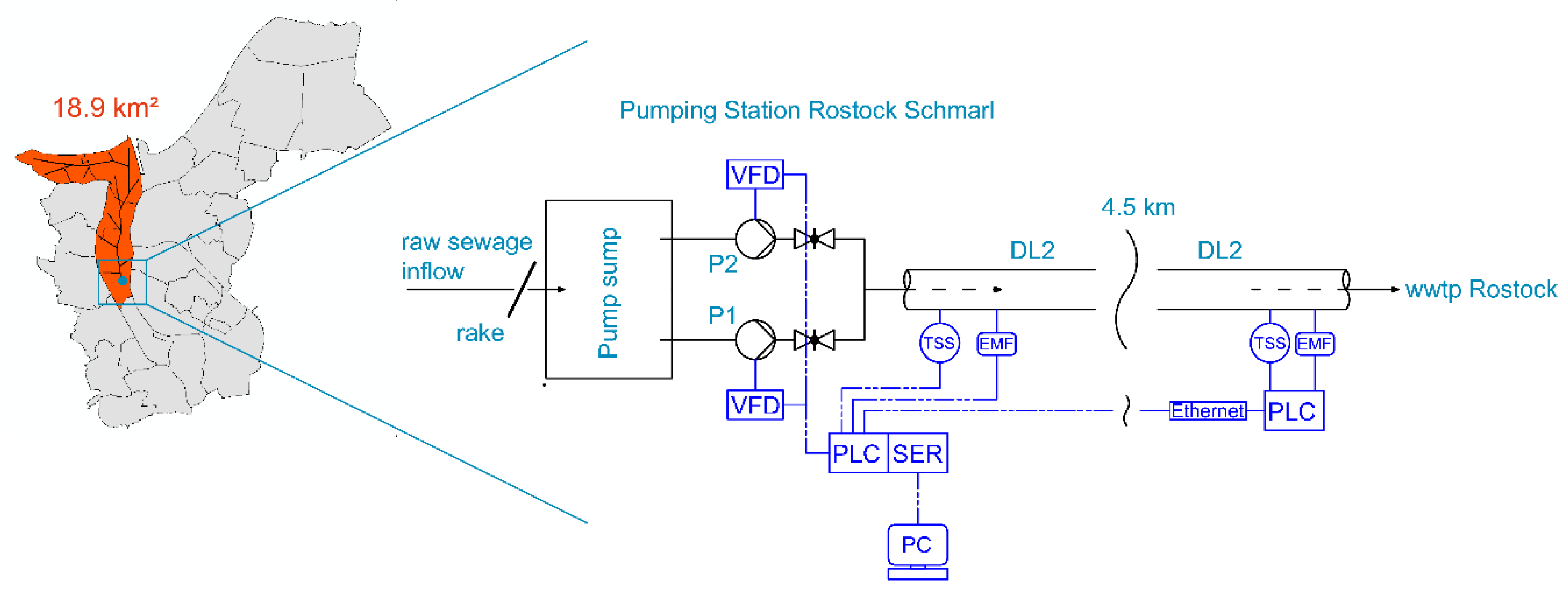
2.1. Study Side
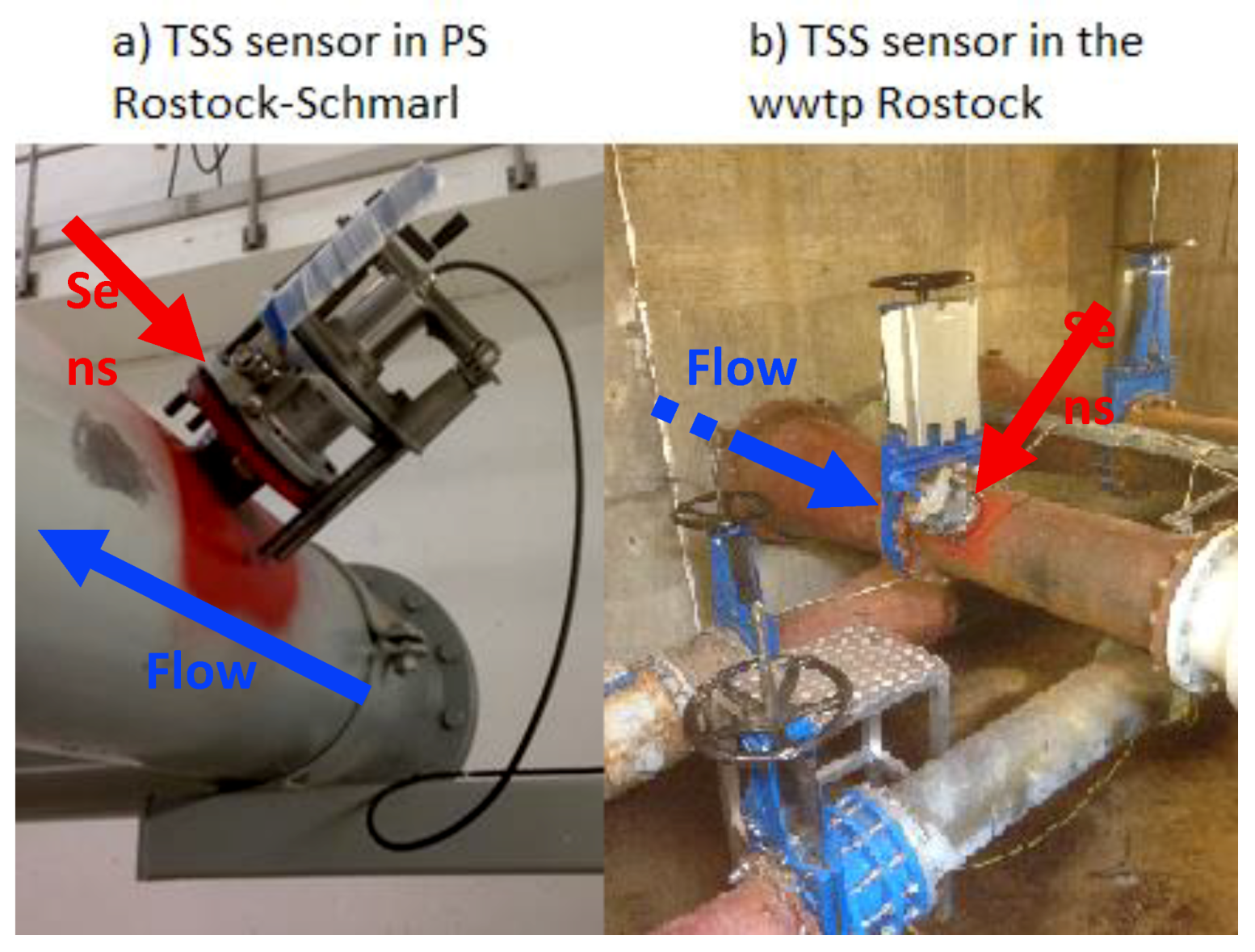
2.2. In-Situ TSS Monitoring
2.3. Sample-Specific Sensor Calibration
2.4. Fit Calibration Function and Analysis of Sensor Data
- Fit calibration function (TSS to TSS) with errors in y and x direction using the total least-squares regression;
- Calculate function parameters uncertainties by Monte-Carlo simulation for 95% confidence level;
- Transform original sensor data TSSsens by the calibration function into calibrated sensor data TSScal;
- Remove TSScal values > 1.000 mg/L, based on local operators’ expertise;
- Further error assessment by Walsh’s outlier test.
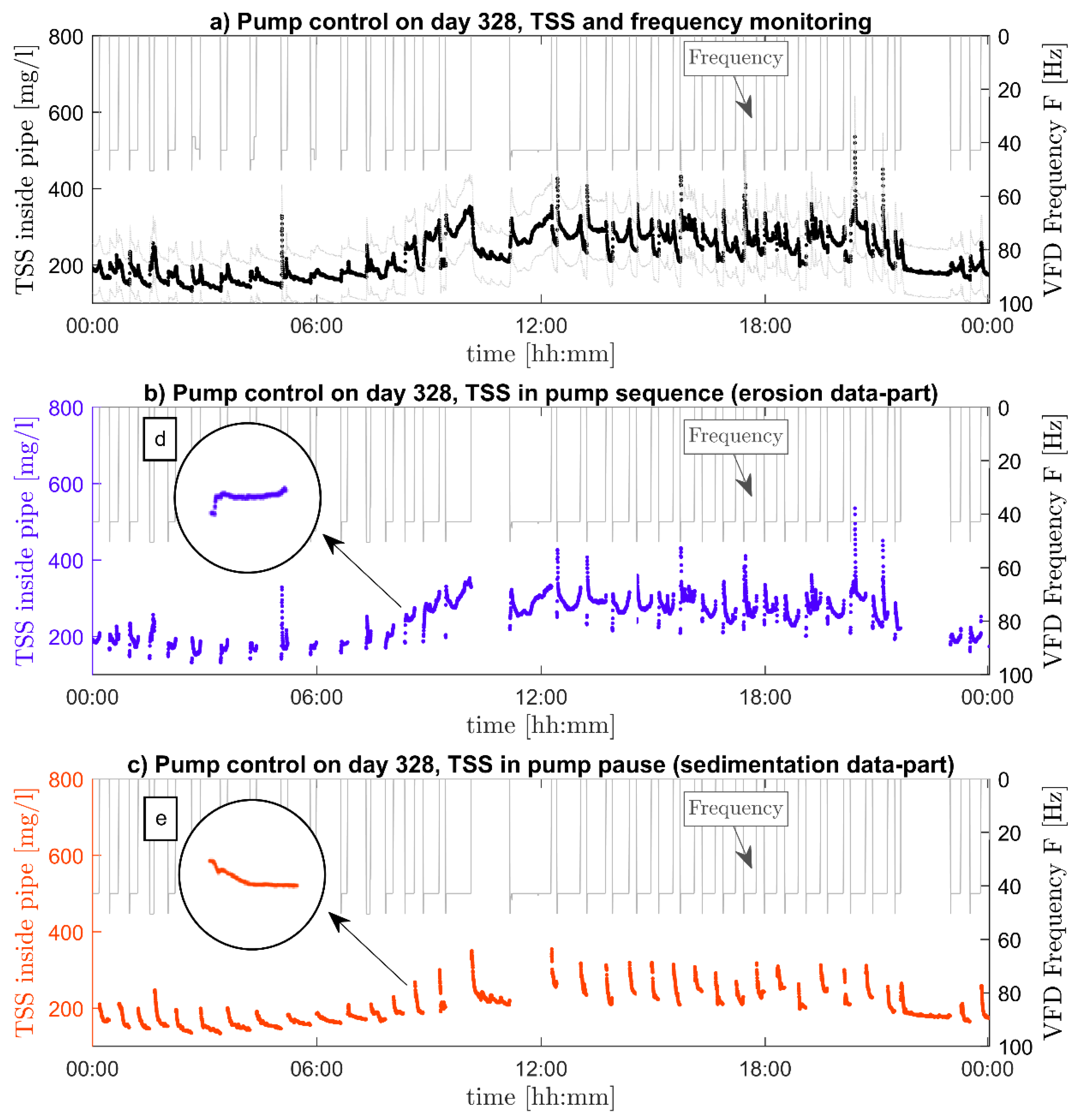
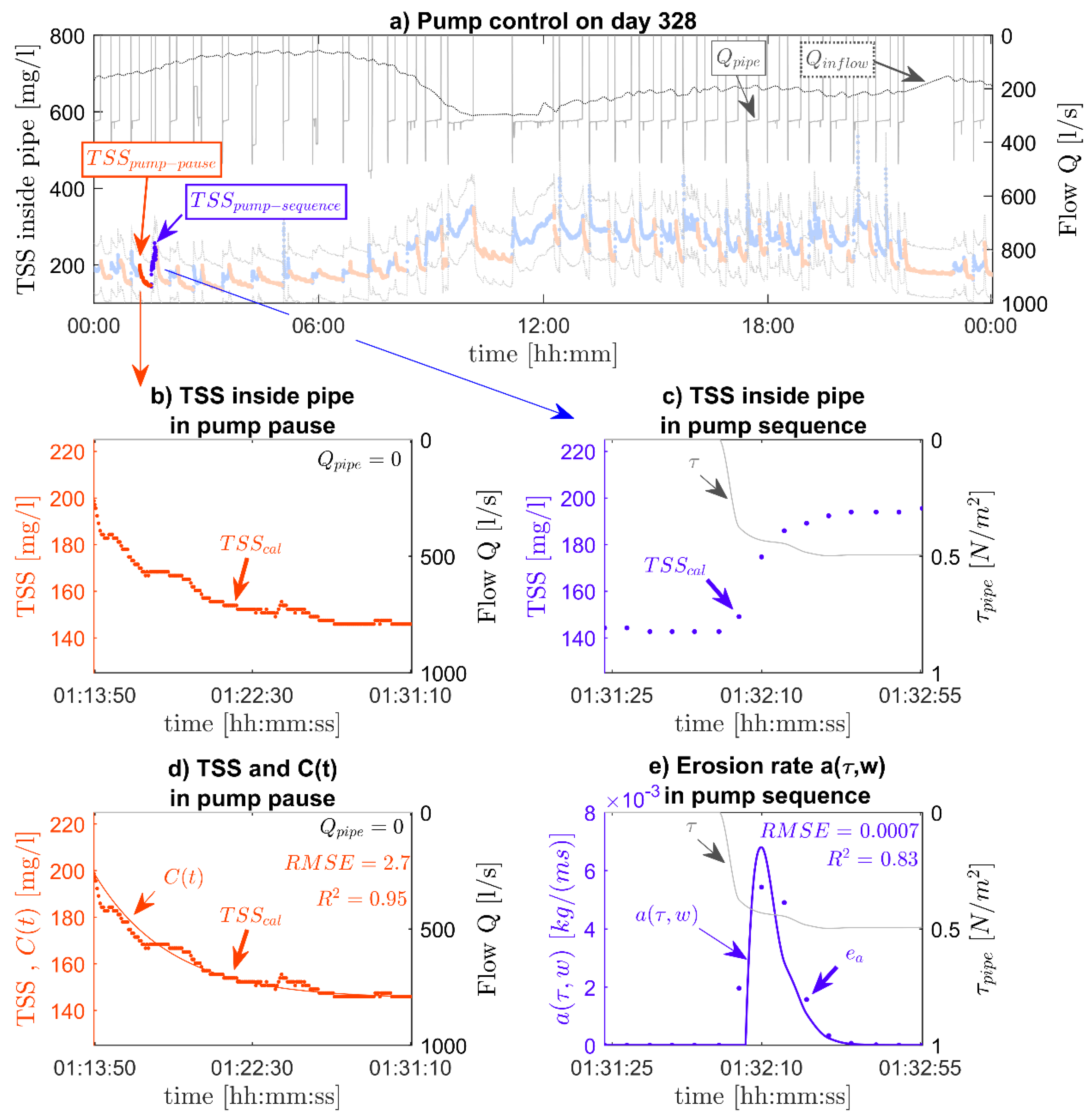
2.5. Determination of Settling- and Erosion Data
3. Results and Discussion
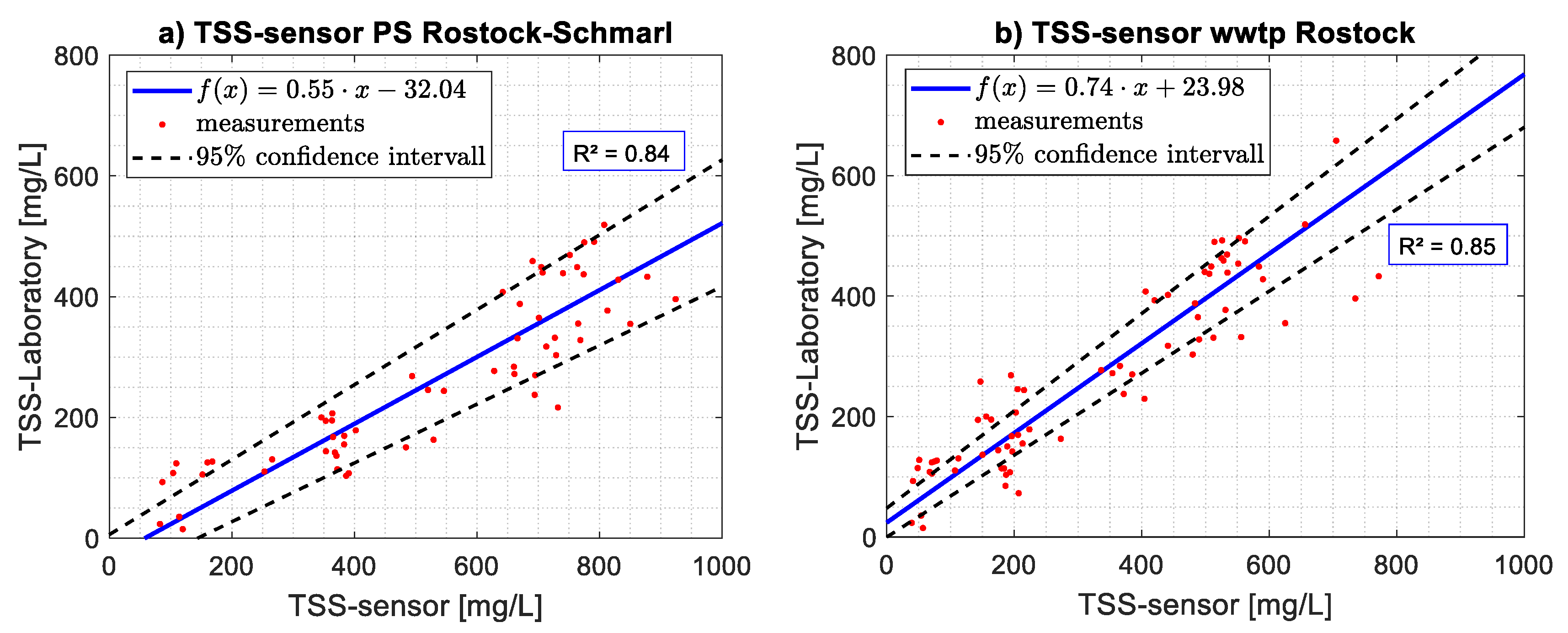
3.1. Sensor Calibration Results
3.2. Evaluation of the Erosion and Settling Approximation
3.3. Settling and Erosion Characteristics Inside the Pressure Pipe Under Dry Weather Inflow
3.4. Comparison to Laboratory (Ex-Situ) Results
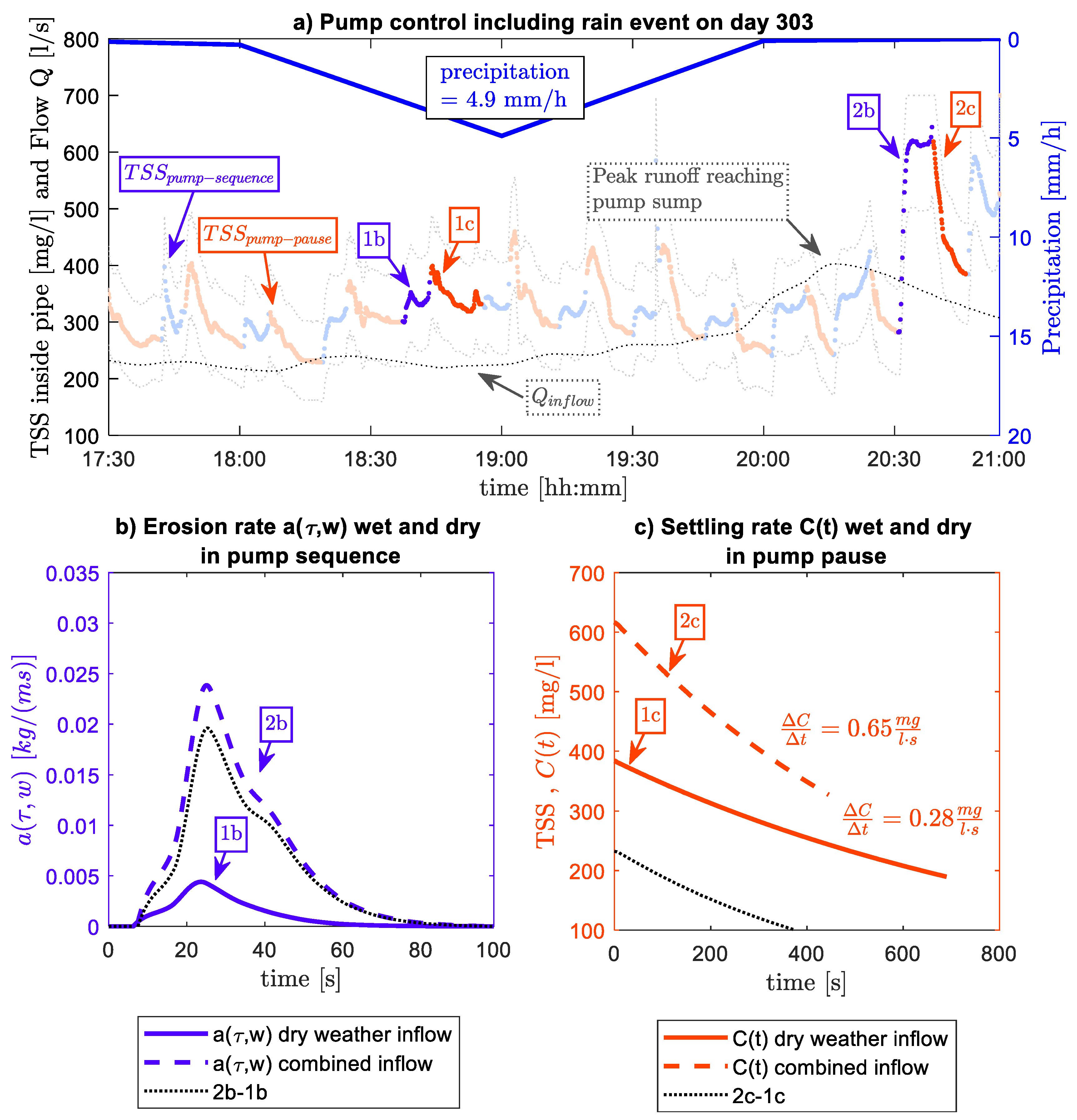
3.5. Effect of Storm Water Inflow to Settling and Erosion Characteristics
3.6. Comparison to Laboratory (Ex-Situ) Results
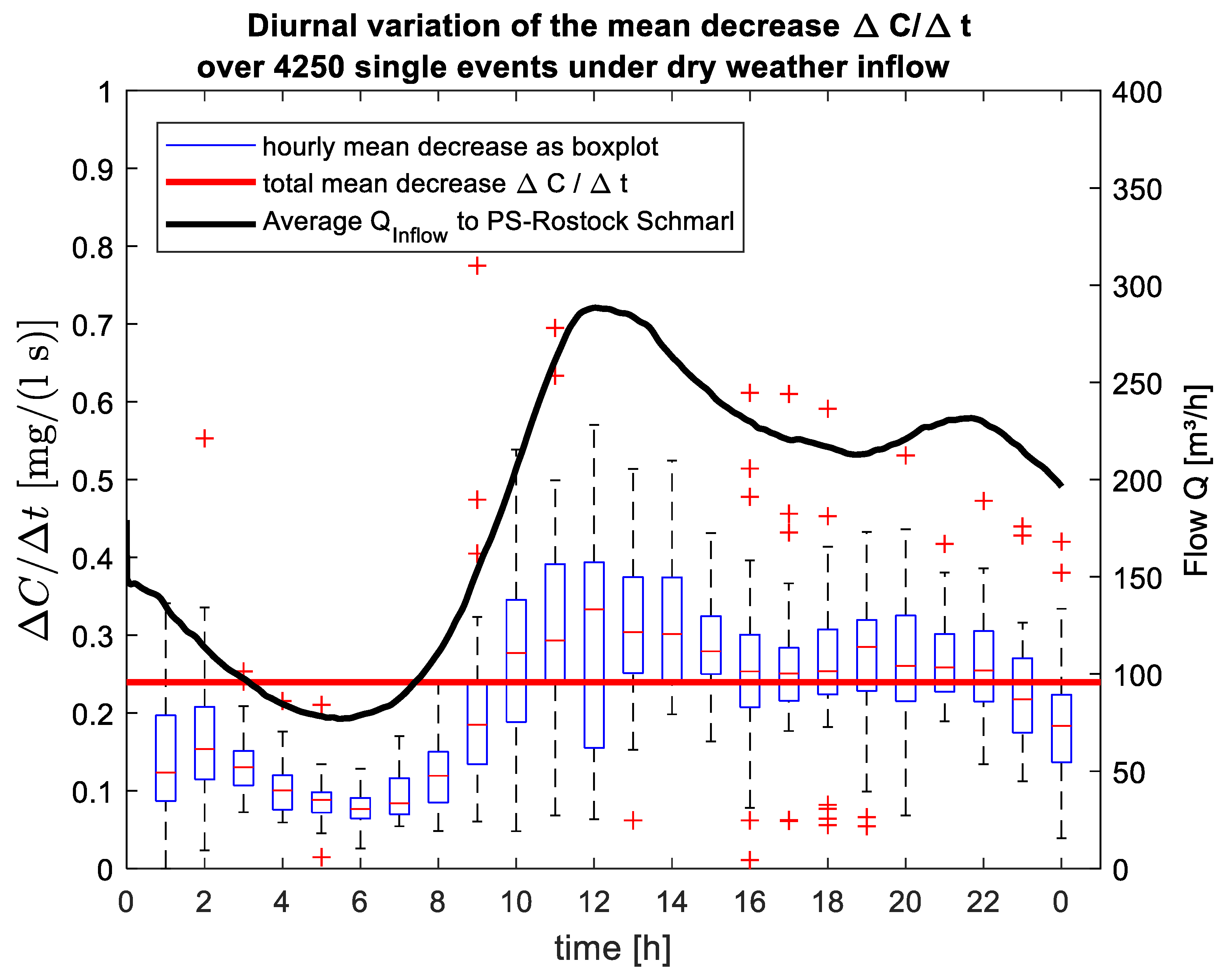
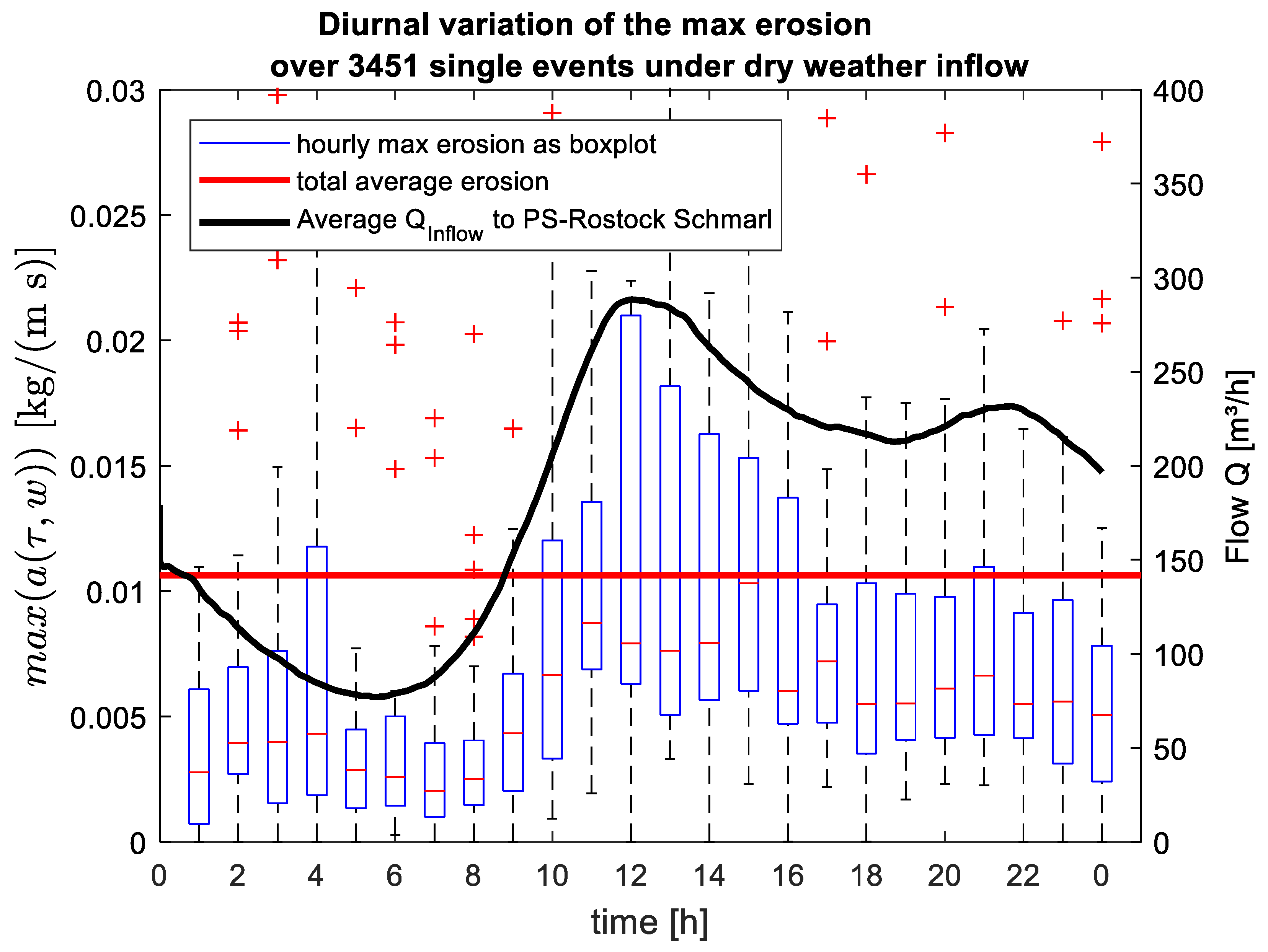
3.7. Diurnal Variation Settling and Erosion
4. Conclusions
- The installed sensors are suitable for supervision of TSS fluxes inside sewage pressure pipes;
- Periodically calibration and maintenance of TSS sensors result in reliable data;
- TSS sensor data allow for a characterization of solids sedimentation and erosion behavior;
- Measured in-situ erosion and settling results are similar to ex-situ (laboratory) results;
- Settling accelerates with high inflow rates (storm water inflow, diurnal inflow peaks) and decelerates with low inflow (reduced TSS inflow in night phases);
- Erosion rate increases and decreases based on the available amount of solids, hence, with changing settling behavior;
- Solids are eroded before maximum shear stress level reached
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rinas, M.; Tränckner, J.; Koegst, T. Erosion characteristics of raw sewage: Investigations for a pumping station in northern Germany under energy efficient pump control. Water Sci. Technol. 2018, 78, 1997–2007. [Google Scholar] [CrossRef] [PubMed]
- Rinas, M.; Tränckner, J.; Koegst, T. Sedimentation of Raw Sewage: Investigations for a Pumping Station in Northern Germany under Energy-Efficient Pump Control. Water 2019, 11, 40. [Google Scholar] [CrossRef]
- Seco, I.; Gómez Valentín, M.; Schellart, A.; Tait, S. Erosion resistance and behaviour of highly organic in-sewer sediment. Water Sci. Technol. 2014, 69, 672–679. [Google Scholar] [CrossRef] [PubMed]
- Gromaire, M.C.; Kafi-Benyahia, M.; Gasperi, J.; Saad, M.; Moilleron, R.; Chebbo, G. Settling velocity of particulate pollutants from combined sewer wet weather discharges. Water Sci. Technol. 2008, 58, 2453–2465. [Google Scholar] [CrossRef] [PubMed]
- Chebbo, G.; Gromaire, M.-C.; Lucas, E. Protocole VICAS: Mesure de la vitesse de chute des MES dans les effluents urbains. TSM Tech. Sci. Methodes Génie Urbain Génie Rural 2003, A98, 39–49. [Google Scholar]
- Regueiro-Picallo, M.; Naves, J.; Anta, J.; Suárez, J.; Puertas, J. Monitoring accumulation sediment characteristics in full scale sewer physical model with urban wastewater. Water Sci. Technol. 2017, 76, 115–123. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Wu, J.; Li, H.; Liu, Z.; Chen, K.; Chen, H.; Xiong, L. Different erosion characteristics of sediment deposits in combined and storm sewers. Water Sci. Technol. 2017, 75, 1922–1931. [Google Scholar] [CrossRef] [PubMed]
- Bersinger, T.; Le Hécho, I.; Bareille, G.; Pigot, T.; Lecomte, A. Continuous Monitoring of Turbidity and Conductivity in Wastewater Networks. Rev. Des Sci. De L’eau 2015, 28, 9. [Google Scholar] [CrossRef]
- Bersinger, T.; Le Hécho, I.; Bareille, G.; Pigot, T. Assessment of erosion and sedimentation dynamic in a combined sewer network using online turbidity monitoring. Water Sci. Technol. 2015, 72, 1375–1382. [Google Scholar] [CrossRef] [PubMed]
- Lacour, C.; Joannis, C.; Chebbo, G. Assessment of annual pollutant loads in combined sewers from continuous turbidity measurements: Sensitivity to calibration data. Water Res. 2009, 43, 2179–2190. [Google Scholar] [CrossRef] [PubMed]
- Métadier, M.; Bertrand-Krajewski, J.-L. From mess to mass: A methodology for calculating storm event pollutant loads with their uncertainties, from continuous raw data time series. Water Sci. Technol. 2011, 63, 369–376. [Google Scholar] [CrossRef] [PubMed]
- Métadier, M.; Bertrand-Krajewski, J.-L. The use of long-term on-line turbidity measurements for the calculation of urban stormwater pollutant concentrations, loads, pollutographs and intra-event fluxes. Water Res. 2012, 46, 6836–6856. [Google Scholar] [CrossRef] [PubMed]
- Lacour, C.; Joannis, C.; Gromaire, M.-C.; Chebbo, G. Potential of turbidity monitoring for real time control of pollutant discharge in sewers during rainfall events. Water Sci. Technol. 2009, 59, 1471–1478. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Barraud, S.; Castebrunet, H.; Aubin, J.-B.; Marmonier, P. Long-term stormwater quantity and quality analysis using continuous measurements in a French urban catchment. Water Res. 2015, 85, 432–442. [Google Scholar] [CrossRef] [PubMed]
- Bertrand-Krajewski, J.-L. TSS concentration in sewers estimated from turbidity measurements by means of linear regression accounting for uncertainties in both variables. Water Sci. Technol. 2004, 50, 81–88. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bertrand-Krajewski, J.-L.; Bardin, J.-P. Evaluation of uncertainties in urban hydrology: Application to volumes and pollutant loads in a storage and settling tank. Water Sci. Technol. 2002, 45, 437–444. [Google Scholar] [CrossRef] [PubMed]
- Knubbe, A.; Fricke, A.; Ecktädt, H.; Neymeyr, K.; Schwarz, M.; Tränckner, J. Energieeffizienter Betrieb von Abwasserfördersystemen Energy efficient strategies for wastewater pumping systems. Gwf. Wasser|Abwasser 2014, 155, 640–646. [Google Scholar]
- HACH-LANGE GmbH. SOLITAX sc User Manual: Edition 4A; HACH LANGE GmbH: Düsseldorf, Germany, 2009; Available online: https://de.hach.com/asset-get.download.jsa?id=25593604876 (accessed on 12 October 2019).
- Deutsches Institut für Normung e.V. (DIN). Deutsche Einheitsverfahren zur Wasser-, Abwasser- und Schlammuntersuchung; Summarische Wirkungs- und Stoffkenngrößen (Gruppe H); Bestimmung des Gesamttrockenrückstandes, des Filtrattrockenrückstandes und des Glührückstandes (H 1) (German Standard Methods for the Examination of Water, Waste Water and Sludge; General Measures of Effects and Substances (Group H); Determination of the Total Solids Residue, the Filtrate Solids Residue and the Residue on Ignition (H 1)); DIN ISO 38414-S; Beuth Verlag GmbH: Berlin, Germany, 1987. [Google Scholar]
- International Organization for Standardization (ISO). Uncertainty of Measurement—Part 3: Guide to the Expression of Uncertainty in Measurement (GUM:1995); ISO/IEC Guide 98-3:2008(E); ISO: Geneva, Switzerland, 2008. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Controller | Parameter | Measuring Range | Installed and Measured Duration | Interval | Service | Num. of Calibration Processes | Wiper Self-Cleaning Interval |
|---|---|---|---|---|---|---|---|---|
| Hach Lange Solitax inline Sc | Hach Sc 200 & Sc 1000 | Turbidity, TSS | 0.001–4000 FNU, 0.00–150.000 mg/L | 343 days installed; 292 days measured | 5 s | 1 per month | 5 processes with 73 samples | 15 min |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rinas, M.; Tränckner, J.; Koegst, T. Sediment Transport in Sewage Pressure Pipes, Part I: Continuous Determination of Settling and Erosion Characteristics by In-Situ TSS Monitoring Inside a Pressure Pipe in Northern Germany. Water 2019, 11, 2125. https://doi.org/10.3390/w11102125
Rinas M, Tränckner J, Koegst T. Sediment Transport in Sewage Pressure Pipes, Part I: Continuous Determination of Settling and Erosion Characteristics by In-Situ TSS Monitoring Inside a Pressure Pipe in Northern Germany. Water. 2019; 11(10):2125. https://doi.org/10.3390/w11102125
Chicago/Turabian StyleRinas, Martin, Jens Tränckner, and Thilo Koegst. 2019. "Sediment Transport in Sewage Pressure Pipes, Part I: Continuous Determination of Settling and Erosion Characteristics by In-Situ TSS Monitoring Inside a Pressure Pipe in Northern Germany" Water 11, no. 10: 2125. https://doi.org/10.3390/w11102125
APA StyleRinas, M., Tränckner, J., & Koegst, T. (2019). Sediment Transport in Sewage Pressure Pipes, Part I: Continuous Determination of Settling and Erosion Characteristics by In-Situ TSS Monitoring Inside a Pressure Pipe in Northern Germany. Water, 11(10), 2125. https://doi.org/10.3390/w11102125