Numerical Simulations of Non-Breaking, Breaking and Broken Wave Interaction with Emerged Vegetation Using Navier-Stokes Equations


Abstract
:1. Introduction
2. Methodology
2.1. Governing Equations
2.2. Turbulence Model
2.3. Boundary Conditions
2.4. Numerical Methods
3. Results
3.1. Solitary Wave Propagation over the Slope
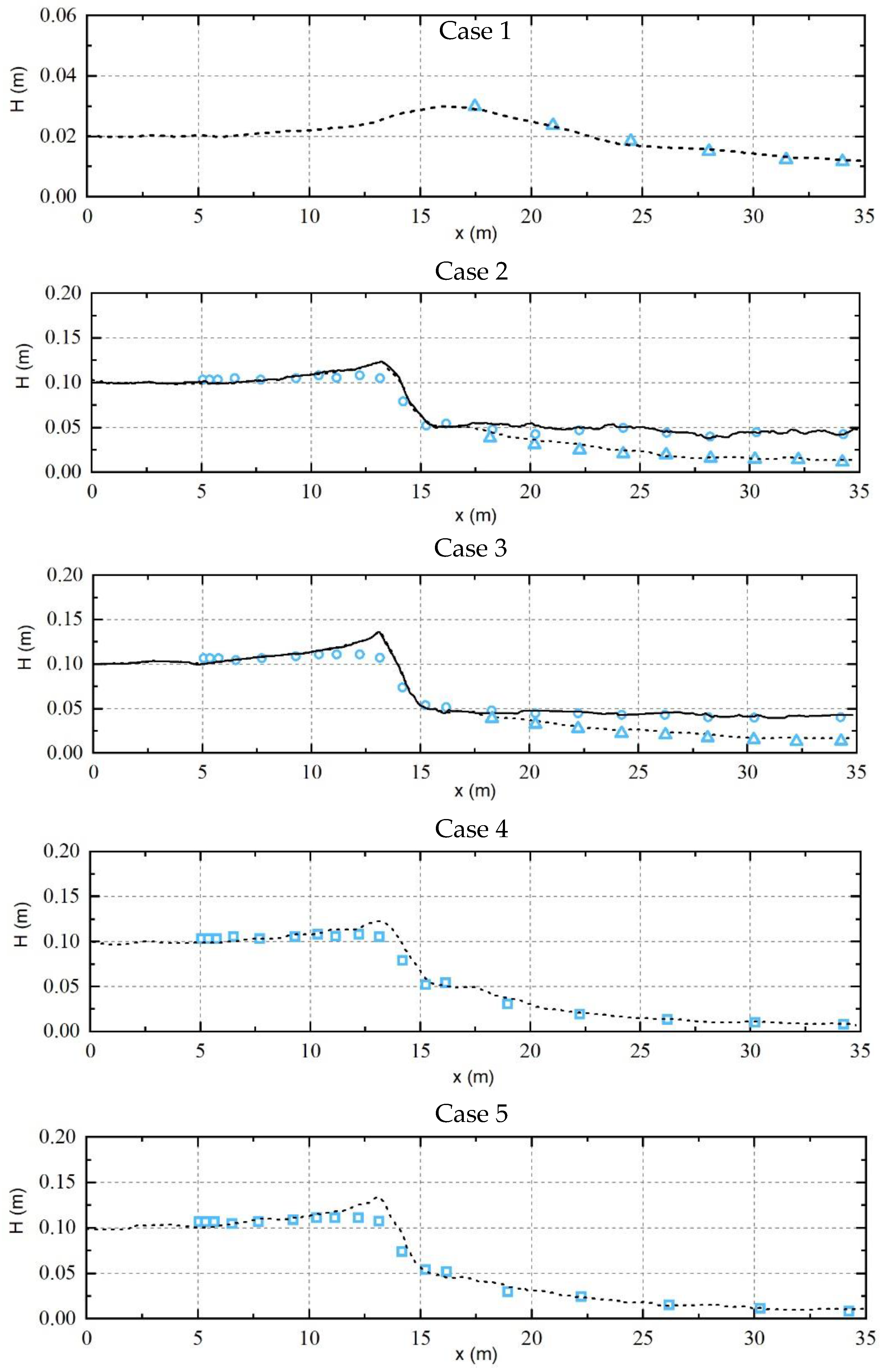
3.2. Regular Wave Propagation over the Slope
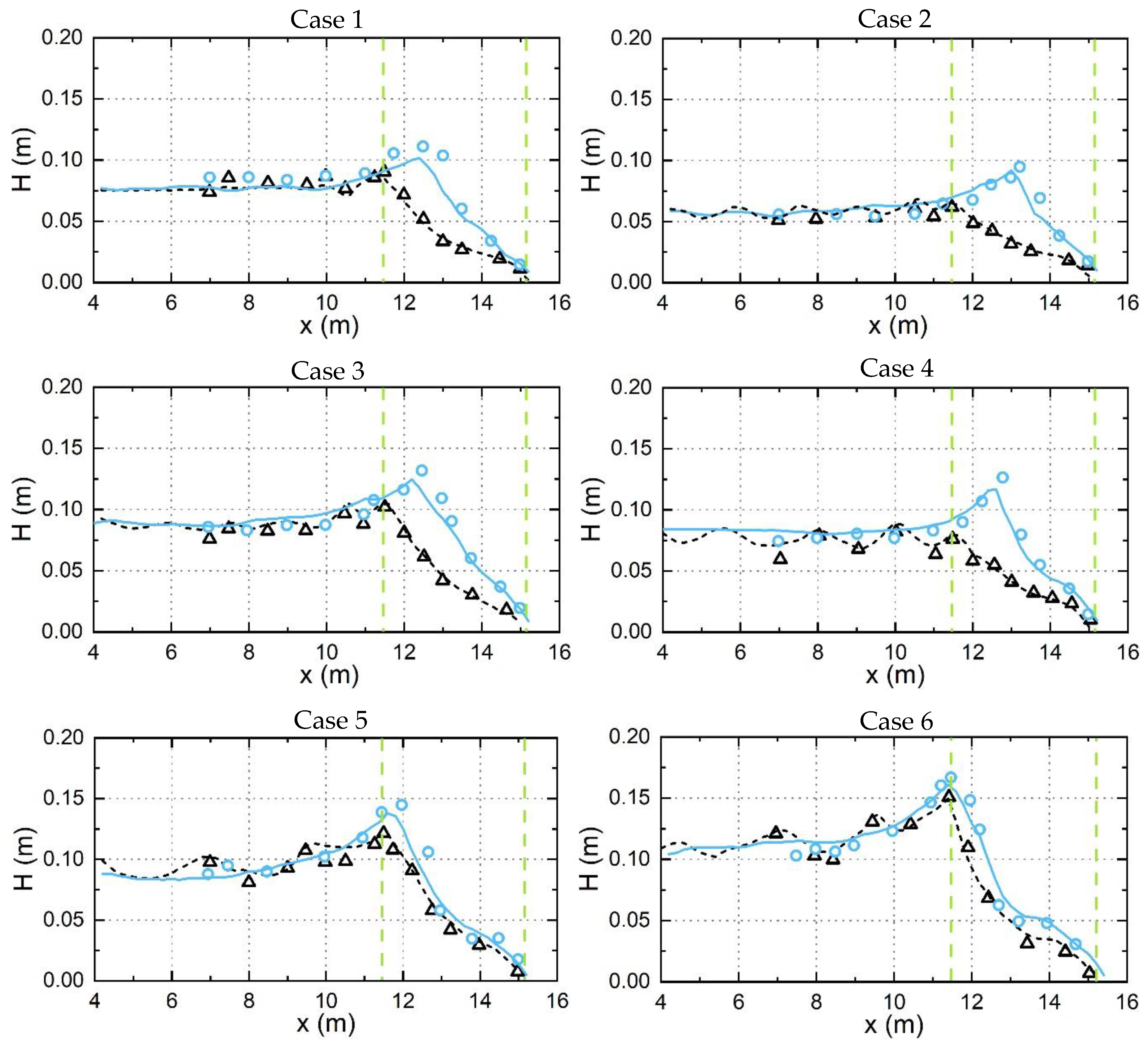
3.3. Regular Wave Propagation over the Shallow Meadow
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Paul, T.; Kevin, H.; David, T. Wave attenuation by emergent wetland vegetation. In Proceedings of the 27th International Conference on Coastal Engineering, Sydney, Australia, 16–21 July 2000; pp. 865–877. [Google Scholar]
- Harada, K.; Imamura, F.; Hiraishi, T. Advances in hydraulics and water engineering Volumes I. In Proceedings of the 13th Iahr-apd Congress, Singapore, 6–8 August 2002; World Scientific: Singapore; pp. 910–915.
- Hiraoka, H.; Ohashi, M.A. (k–ε) turbulence closure model for plant canopy flows. J. Wind Eng. Ind. Aerodyn. 2008, 96, 2139–2149. [Google Scholar] [CrossRef]
- Chen, H.; Zou, Q.P. Eulerian-Lagrangian flow-vegetation interaction model using immersed boundary method and OpenFOAM. Adv. Water Resour. 2019, 126, 176–192. [Google Scholar] [CrossRef]
- Dalrymple, R.A.; Kirby, J.T.; Hwang, P.A. Wave Diffraction Due to Areas of Energy Dissipation. J. Waterw. Port Coast. Ocean Eng. 1984, 110, 67–79. [Google Scholar] [CrossRef]
- Mendez, F.J.; Losada, I.J. An empirical model to estimate the propagation of random breaking and nonbreaking waves over vegetation fields. Coast. Eng. 2004, 51, 103–118. [Google Scholar] [CrossRef]
- Stratigaki, V.; Manca, E.; Prinos, P.; Losada, I.J.; Lara, J.; Sclavo, M.; Amos, C.; Caceres, I.; Sánchez-Arcilla, A. Large-Scale experiments on wave propagation over posidonia oceanica. J. Hydraul. Res. 2011, 49, 31–43. [Google Scholar] [CrossRef]
- Iimura, K.; Tanaka, N. Numerical simulation estimating effects of tree density distribution in coastal forest on tsunami mitigation. Ocean Eng. 2012, 54, 223–232. [Google Scholar] [CrossRef]
- Koftis, T.; Prinos, P.; Stratigaki, V. Wave damping over artificial Posidonia oceanica meadow: A large-scale experimental study. Coast. Eng. 2013, 73, 71–83. [Google Scholar] [CrossRef]
- Phan, K.L.; Stive, M.J.F.; Zijlema, M.; Truong, H.S.; Aarninkhof, S.G.J. The effects of wave non-linearity on wave attenuation by vegetation. Coast. Eng. 2019, 147, 63–74. [Google Scholar] [CrossRef]
- Arnaud, G.; Rey, V.; Touboul, J.; Sous, D.; Molin, B.; Gouaud, F. Wave propagation through dense vertical cylinder arrays: Interference process and specific surface effects on damping. Appl. Ocean Res. 2017, 65, 229–237. [Google Scholar] [CrossRef]
- Houser, C.; Trimble, S.; Morales, B. Influence of blade flexibility on the drag coefficient of aquatic vegetation. Estuaries Coasts 2015, 38, 569–577. [Google Scholar] [CrossRef]
- Luhar, M.; Nepf, H.M. Wave-induced dynamics of flexible blades. J. Fluids Struct. 2016, 61, 20–41. [Google Scholar] [CrossRef] [Green Version]
- Cavallaro, L.; Viviano, A.; Paratore, G.; Foti, E. Experiments on surface waves interacting with flexible aquatic vegetation. Ocean Sci. J. 2018, 53, 461–474. [Google Scholar] [CrossRef] [Green Version]
- Maza, M.; Lara, J.L.; Losada, I.J. Tsunami wave interaction with mangrove forests: A 3-D numerical approach. Coast. Eng. 2015, 98, 33–54. [Google Scholar] [CrossRef]
- Strusinska-Correia, A.; Husrin, S.; Oumeraci, H. Tsunami damping by mangrove forest: A laboratory study using parameterized trees. Nat. Hazards Earth Syst. Sci. 2013, 13, 483. [Google Scholar] [CrossRef] [Green Version]
- Knutson, P.L.; Brochu, R.A.; Seelig, W.N.; Inskeep, M. Wave damping in Spartina alterniflora marshes. Wetlands 1982, 2, 87–104. [Google Scholar] [CrossRef]
- Paul, M.; Bouma, T.; Amos, C. Wave Attenuation by Submerged Vegetation: Combining the Effect of Organism Traits and Tidal Current. Mar. Ecol. Prog. Ser. 2012, 444, 31–41. [Google Scholar] [CrossRef] [Green Version]
- Vanegas, G.C.A.; Osorio, A.F.; Urrego, L.E. Wave dissipation across a Rhizophora mangrove patch on a Colombian Caribbean Island: An experimental approach. Ecol. Eng. 2019, 130, 271–281. [Google Scholar] [CrossRef]
- Suzuki, T.; Zijlema, M.; Burger, B.; Meijer, M.C.; Narayan, S. Wave dissipation by vegetation with layer schematization in SWAN. Coast. Eng. 2012, 59, 64–71. [Google Scholar] [CrossRef]
- Vo-Luong, P.; Massel, S. Energy dissipation in non-uniform mangrove forests of arbitrary depth. J. Mar. Syst. 2008, 74, 603–622. [Google Scholar] [CrossRef]
- Augustin, L.N.; Irish, J.L.; Lynett, P. Laboratory and numerical studies of wave damping by emergent and near-emergent wetland vegetation. Coast. Eng. 2009, 56, 332–340. [Google Scholar] [CrossRef]
- Suzuki, T.; Hu, Z.; Kumada, K.; Phan, L.K.; Zijlema, M. Non-hydrostatic modeling of drag, inertia and porous effects in wave propagation over dense vegetation fields. Coast. Eng. 2019, 149, 49–64. [Google Scholar] [CrossRef]
- Maza, M.; Lara, J.L.; Losada, I.J. A coupled model of submerged vegetation under oscillatory flow using Navier–Stokes equations. Coast. Eng. 2013, 80, 16–34. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Q.; Zhan, J.; Liu, D. Numerical simulations of wave propagation over a vegetated platform. Coast. Eng. 2016, 110, 64–75. [Google Scholar] [CrossRef] [Green Version]
- Ting, F.C.K.; Kirby, J.T. Observation of undertow and turbulence in a laboratory surf zone. Coast. Eng. 1994, 24, 51–80. [Google Scholar] [CrossRef]
- Nepf, H.M. Drag, turbulence, and diffusion in flow through emergent vegetation. Water Resour. Res. 1999, 35, 479–489. [Google Scholar] [CrossRef]
- Brown, S.A.; Greaves, D.M.; Magar, V.; Conley, D.C. Evaluation of turbulence closure models under spilling and plunging breakers in the surf zone. Coast. Eng. 2016, 114, 177–193. [Google Scholar] [CrossRef] [Green Version]
- Devolder, B.; Troch, P.; Rauwoens, P. Performance of a buoyancy-modified k-ω and k-ω SST turbulence model for simulating wave breaking under regular waves using OpenFOAM®. Coast. Eng. 2018, 138, 49–65. [Google Scholar] [CrossRef] [Green Version]
- Lubin, P.; Vincent, S.; Abadie, S.; Caltagirone, J.P. Three-dimensional large eddy simulation of air entrainment under plunging breaking waves. Coast. Eng. 2006, 53, 631–655. [Google Scholar] [CrossRef] [Green Version]
- Lubin, P.; Glockner, S.; Kimmoun, O.; Branger, H. Numerical study of the hydrodynamics of regular waves breaking over a sloping beach. Eur. J. Mech. 2011, 30, 552–564. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Shen, S.; Wang, H. Numerical model for coastal wave propagation through mild slope zone in the presence of rigid vegetation. Coast. Eng. 2015, 97, 53–59. [Google Scholar] [CrossRef]
- Morison, J.R.; Johnson, J.W.; Schaaf, S.A. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Reeve, D.; Chadwick, A.; Fleming, C. Coastal Engineering: Processes, Theory and Design Practice; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Wu, W.; Ozeren, Y.; Wren, D.; Chen, Q.; Zhang, G.; Holland, M.; Marsooli, R.; Lin, Q.; Jadhav, R.; Parker, K.R.; et al. Investigation of Surge and Wave Reduction by Vegetation: Phase II Report for SERRI Project; The University of Missippi: Oxford, MS, USA, 2012. [Google Scholar]
- Chen, H.; Liu, X.; Zou, Q.P. Wave-driven flow induced by suspended and submerged canopies. Adv. Water Resour. 2019, 123, 160–172. [Google Scholar] [CrossRef]
- Kobayashi, N.; Raichle, A.W.; Asano, T. Wave Attenuation by Vegetation. J. Waterw. Port Coastal Ocean Eng. 1993, 119, 30–48. [Google Scholar] [CrossRef]
- Tanino, Y.; Nepf, H.M. Laboratory investigation of mean drag in a random array of rigid, emergent cylinders. J. Hydraul. Eng. 2008, 134, 34–41. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Incident Wave Height Hi (m) | Vegetation Width w (m) | Vegetation Density N (unit/m2) | Calibrated CD |
|---|---|---|---|---|
| 1 | 0.0314 | 1.0 | 462 | 0.71 |
| 2 | 0.0314 | 0.36 | 1283 | 0.66 |
| 3 | 0.0314 | 0.04 | 11,547 | 1.73 |
| 4 | 0.0314 | 0.08, 0.32 | 2887, 722 | 0.83, 0.84 |
| 5 | 0.0314 | 0.32, 0.08 | 722, 2887 | 0.76, 0.92 |
| Case | Incident Wave Height Hi (m) | Wave Period T (s) | Vegetation Density N (unit/m2) | Calibrated CD |
|---|---|---|---|---|
| 1 | 0.0873 | 1.2 | 3182 | 1.7 |
| 2 | 0.0533 | 1.8 | 3182 | 1.7 |
| 3 | 0.0830 | 1.8 | 3182 | 1.7 |
| 4 | 0.0782 | 2.4 | 3182 | 1.7 |
| 5 | 0.0735 | 3.0 | 3182 | 1.7 |
| 6 | 0.0853 | 3.0 | 3182 | 1.7 |
| Case | Incident Wave Height Hi (m) | Wave Period T (s) | Vegetation Density N (unit/m2) | Calibrated CD |
|---|---|---|---|---|
| 1 | 0.02 | 2.0 | 200 | 1.62 |
| 2 | 0.1 | 2.0 | 200 | 1.58 |
| 3 | 0.1 | 3.0 | 200 | 1.56 |
| 4 | 0.1 | 2.0 | 400 | 1.45 |
| 5 | 0.1 | 3.0 | 400 | 1.41 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, X.; Zhu, L.; Zhao, J. Numerical Simulations of Non-Breaking, Breaking and Broken Wave Interaction with Emerged Vegetation Using Navier-Stokes Equations. Water 2019, 11, 2561. https://doi.org/10.3390/w11122561
Zou X, Zhu L, Zhao J. Numerical Simulations of Non-Breaking, Breaking and Broken Wave Interaction with Emerged Vegetation Using Navier-Stokes Equations. Water. 2019; 11(12):2561. https://doi.org/10.3390/w11122561
Chicago/Turabian StyleZou, Xuefeng, Liangsheng Zhu, and Jun Zhao. 2019. "Numerical Simulations of Non-Breaking, Breaking and Broken Wave Interaction with Emerged Vegetation Using Navier-Stokes Equations" Water 11, no. 12: 2561. https://doi.org/10.3390/w11122561
APA StyleZou, X., Zhu, L., & Zhao, J. (2019). Numerical Simulations of Non-Breaking, Breaking and Broken Wave Interaction with Emerged Vegetation Using Navier-Stokes Equations. Water, 11(12), 2561. https://doi.org/10.3390/w11122561