A Model Predictive Water-Level Difference Control Method for Automatic Control of Irrigation Canals



Abstract
:1. Introduction
2. Materials and Methods
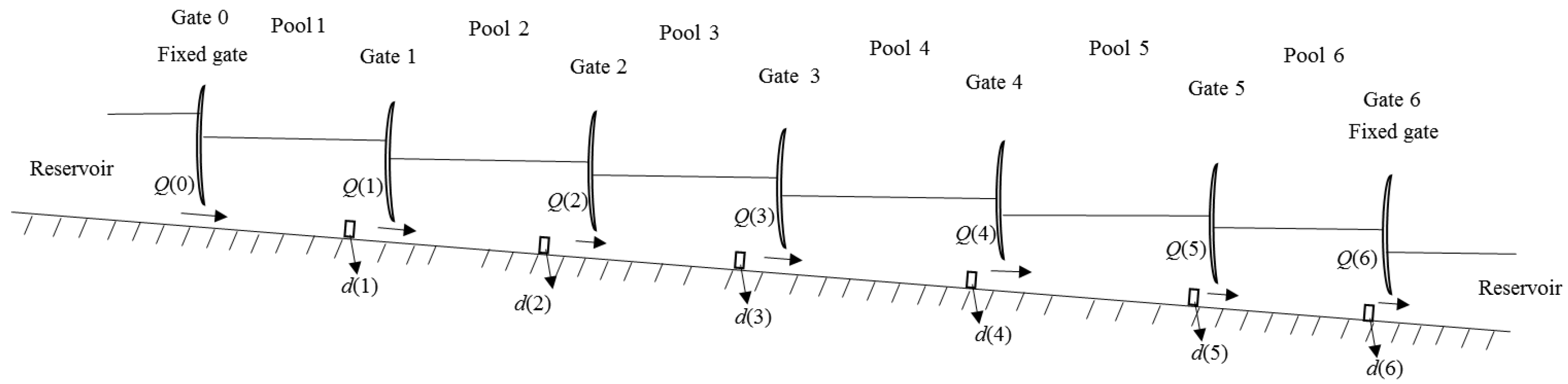
2.1. Test Canal and Scenarios
2.2. Simulation Model
2.3. Water Level Difference Control Strategies
2.4. Model Predictive Control
2.5. Performance Indicators
3. Results
4. Conclusions
- Water level difference control allows the operator to have no full control of the head gate and the tailgate while automatically controlling all check gates in between. It reveals flow mismatches by causing the water levels to rise or fall at the same rate.
- By adding a weight coefficient to the water level deviation to construct water level difference and with several changes in controller design, the control method can make the water levels rise or fall at different rates in the proportion that people want with flow mismatches, consequently changing the water level deviations with the proportion.
- Both the LQR and MPC control methods with the proposed control strategy work to minimize the water level difference, however the MPC control performs better even with no future disturbance information taken into account as a local optimization is better than global optimization in LQR control in water level difference control.
- The MPC control method performs better when future disturbance information is taken into account and can take feed-forward control before disturbance happens. However, the more upstream the disturbance occurs, the less obvious this advantage is.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Burt, C.M. Current Canal Modernization from an International Perspective. In Proceedings of the Uscid Workshop on Modernization of Irrigation Water Delivery Systems, Scottsdale, AZ, USA, 17 October 1999. [Google Scholar]
- Zimbelman, D.D. Planning, Operation, Rehabilitation, and Automation of Irrigation Water Delivery Systems; American Society of Civil Engineers: New York, NY, USA, 1987; p. 391. [Google Scholar]
- Rodriguez, C.E.; Patterson, C.G.; Hesla, E. Panama Canal Control System. IEEE Ind. Appl. Mag. 2009, 15, 8–11. [Google Scholar]
- Ghumman, A.R.; Khan, M.Z.; Khan, A.H.; Munir, S. Assessment of Operational Strategies for Logical and Optimal Use of Irrigation Water in a Downstream Control System. Irrig. Drain. 2010, 59, 117–128. [Google Scholar] [CrossRef]
- Schuurmans, J.; Schuurmans, W.; Berger, H.; Meulenberg, M.; Brouwer, R. Control of Water Levels in the Meuse River. J. Irrig. Drain. Eng. 1997, 123, 180–184. [Google Scholar] [CrossRef]
- Malaterre, P.O.; Rogers, D.C.; Schuurmans, J. Classification of Canal Control Algorithms. J. Irrig. Drain. Eng. 1998, 124, 3–10. [Google Scholar] [CrossRef]
- Burt, C.M.; Mills, R.S.; Khalsa, R.D. Improved Proportional-Integral (Pi) Logic for Canal Automation. J. Irrig. Drain. Eng. 1998, 124, 53–57. [Google Scholar] [CrossRef]
- Cui, W.; Chen, W.; Mu, X.; Bai, Y. Canal Controller for the Largest Water Transfer Project in China. Irrig Drain. 2015, 63, 501–511. [Google Scholar] [CrossRef]
- Shang, Y.; Liu, R.; Li, T.; Zhang, C.; Wang, G. Transient Flow Control for an Artificial Open Channel Based on Finite Difference Method. Sci. China Technol. Sci. 2011, 54, 781–792. [Google Scholar] [CrossRef]
- Malaterre, P.O. Pilote: Linear Quadratic Optimal Controller for Irrigation Canals. J. Irrig. Drain. Eng. 1998, 124, 187–194. [Google Scholar] [CrossRef]
- Sadowska, A.; Schutter, B.D.; Overloop PJ, V. Delivery-Oriented Hierarchical Predictive Control of an Irrigation Canal: Event-Driven Versus Time-Driven Approaches. IEEE Trans. Control Syst. Technol. 2015, 23, 1701–1716. [Google Scholar] [CrossRef]
- Burt, C.M. The Irrigation Sector Shift from Construction to Modernization: What Is Required for Success? Irrig. Drain. 2013, 62, 247–254. [Google Scholar] [CrossRef]
- Clemmens, A.J. Water-Level Difference Controller for Main Canals. J. Irrig. Drain. Eng. 2012, 138, 1–8. [Google Scholar] [CrossRef]
- Guan, G.; Clemmens, A.J.; Kacerek, T.F.; Wahlin, B.T. Applying Water-Level Difference Control to Central Arizona Project. J. Irrig. Drain. Eng. 2011, 137, 747–753. [Google Scholar] [CrossRef]
- Hashemy, S.M.; Overloop, P.J.V. Applying Decentralized Water Level Difference Control for Operation of the Dez Main Canal under Water Shortage. J. Irrig. Drain. Eng. 2013, 139, 1037–1044. [Google Scholar] [CrossRef]
- Kong, L.; Lei, X.; Yang, Q.; Zheng, H.; Wang, H. Automatic Feedback Control Algorithm for Canal for a Quick Upstream Water Supply Interruption in the Case of an Emergency. MATEC Web Conf. 2018, 246, 02026. [Google Scholar] [CrossRef]
- Peter, R. Design and Evaluation of Control Systems for a Real Canal. Sci. China Technol. Sci. 2012, 55, 142–154. [Google Scholar]
- Strelkoff, T.S.; Falvey, H.T. Numerical Methods Used to Model Unsteady Canal Flow. J. Irrig. Drain. Eng. 1993, 119, 637–655. [Google Scholar] [CrossRef]
- Chalfen, M.; Niemiec, A. Analytical and Numerical Solution of Saint-Venant Equations. J. Hydrol. 1986, 86, 1–13. [Google Scholar] [CrossRef]
- Soler, J.; Gómez, M.; Rodellar, J. Goroso: Feedforward Control Algorithm for Irrigation Canals Based on Sequential Quadratic Programming. J. Irrig. Drain. Eng. 2013, 139, 41–54. [Google Scholar] [CrossRef]
- Malaterre, P.O. Pilote: Optimal Control of Irrigation Canals. In Proceedings of the Water Resources Engineering, New York, NY, USA, 17 August 1995. [Google Scholar]
- Clemmens, A.J.; Wahlin, B.T. Simple Optimal Downstream Feedback Canal Controllers: Asce Test Case Results. J. Irrig. Drain. Eng. 2004, 130, 35–46. [Google Scholar] [CrossRef]
- Clemmens, A.J.; Schuurmans, J. Simple Optimal Downstream Feedback Canal Controllers: Theory. J. Irrig. Drain. Eng. 2004, 130, 26–34. [Google Scholar] [CrossRef]
- Schuurmans, J.; Bosgra, O.H.; Brouwer, R. Open-Channel Flow Model Approximation for Controller Design. Appl. Math. Model. 1995, 19, 525–530. [Google Scholar] [CrossRef]
- Schuurmans, J.; Hof, A.; Dijkstra, S.; Bosgra, O.H.; Brouwer, R. Simple Water Level Controller for Irrigation and Drainage Canals. J. Irrig. Drain. Eng. 1999, 125, 189–195. [Google Scholar] [CrossRef]
- Isapoor, S.; Montazar, A.; Overloop, P.J.V.; Giesen, N.V.D. Designing and Evaluating Control Systems of the Dez Main Canal. Irrig. Drain. 2011, 60, 70–79. [Google Scholar] [CrossRef]
- Perez, R.R.; Batlle, V.F.; Rodriguez, L.S. Robust System Identification of an Irrigation Main Canal. Adv. Water Resour. 2007, 30, 1785–1796. [Google Scholar] [CrossRef]
- Bautista, E. Real-Time Implementation of Model Predictive Control on Maricopa-Stanfield Irrigation and Drainage District’s Wm Canal. J. Irrig. Drain. Eng. 2010, 136, 747–756. [Google Scholar]
- Wahlin, B.T. Performance of Model Predictive Control on ASCE Test Canal 1. J. Irrig. Drain. Eng. 2004, 130, 227–238. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pool | Pool Length (km) | Bottom Width (m) | Side Slope | Slope | Downstream Initial Flows (m3/s) | Offtake Initial Flowsb (m3/s) | Target Water Depth (m) |
|---|---|---|---|---|---|---|---|
| Heading | 94.5 | ||||||
| 1 | 26.6 | 21 | 2 | 9.8 × 10−5 | 87 | 7.5 | 4.5 |
| 2 | 9.7 | 22.5 | 2.75 | 3.9 × 10−5 | 70 | 17 | 4.5 |
| 3 | 14.9 | 17 | 1 | 6.2 × 10−5 | 42 | 28 | 4.21 |
| 4 | 20.8 | 10 | 2 | 5.4 × 10−5 | 42 | 0 | 4.19 |
| 5 | 14.7 | 7.5 | 2.5 | 5.1 × 10−5 | 42 | 0 | 4.21 |
| 6 | 25.4 | 7.5 | 2.5 | 5.3 × 10−5 | 35 | 7 | 3.95 |
| Pool | Pool 1 | Pool 2 | Pool 3 | Pool 4 | Pool 5 | Pool 6 | |
|---|---|---|---|---|---|---|---|
| Characteristics | |||||||
| As (m2) | 582,524 | 441,176 | 327,869 | 447,761 | 361,446 | 431,655 | |
| Td (min) | 70 | 24 | 35 | 57 | 41 | 75 | |
| Indicators | Scenario 1 | Scenario 2 | Scenario 3 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MPC-I | MPC-II | LQR-I | LQR-II | MPC-I | MPC-II | LQR-I | LQR-II | MPC-I | MPC-II | LQR-I | LQR-II | ||
| MAE (m) | Pool 1 | 0.144 | 0.144 | 0.182 | 0.180 | 0.187 | 0.185 | 0.209 | 0.210 | 0.167 | 0.168 | 0.231 | 0.197 |
| Pool 2 | 0.144 | 0.142 | 0.177 | 0.171 | 0.186 | 0.184 | 0.205 | 0.201 | 0.165 | 0.166 | 0.216 | 0.186 | |
| Pool 3 | 0.133 | 0.130 | 0.148 | 0.150 | 0.173 | 0.169 | 0.174 | 0.177 | 0.155 | 0.155 | 0.170 | 0.159 | |
| Pool 4 | 0.118 | 0.115 | 0.112 | 0.124 | 0.156 | 0.150 | 0.135 | 0.150 | 0.138 | 0.138 | 0.117 | 0.128 | |
| Pool 5 | 0.104 | 0.101 | 0.088 | 0.098 | 0.139 | 0.133 | 0.113 | 0.124 | 0.114 | 0.114 | 0.073 | 0.096 | |
| Pool 6 | 0.092 | 0.089 | 0.090 | 0.081 | 0.063 | 0.080 | 0.082 | 0.080 | 0.047 | 0.047 | 0.023 | 0.037 | |
| AAE (m) | Pool 1 | 0.079 | 0.073 | 0.096 | 0.118 | 0.107 | 0.098 | 0.107 | 0.130 | 0.109 | 0.115 | 0.144 | 0.128 |
| Pool 2 | 0.079 | 0.078 | 0.097 | 0.113 | 0.106 | 0.104 | 0.109 | 0.127 | 0.098 | 0.106 | 0.128 | 0.115 | |
| Pool 3 | 0.074 | 0.077 | 0.085 | 0.095 | 0.098 | 0.102 | 0.098 | 0.109 | 0.074 | 0.083 | 0.088 | 0.085 | |
| Pool 4 | 0.070 | 0.074 | 0.068 | 0.075 | 0.090 | 0.096 | 0.082 | 0.088 | 0.052 | 0.058 | 0.046 | 0.053 | |
| Pool 5 | 0.068 | 0.076 | 0.064 | 0.063 | 0.086 | 0.099 | 0.086 | 0.081 | 0.035 | 0.038 | 0.022 | 0.031 | |
| Pool 6 | 0.071 | 0.081 | 0.072 | 0.059 | 0.047 | 0.056 | 0.057 | 0.045 | 0.013 | 0.012 | 0.005 | 0.009 | |
| MAD (m) | Pool 1 | 0.012 | 0.013 | 0.006 | 0.010 | 0.014 | 0.015 | 0.006 | 0.010 | 0.014 | 0.018 | 0.020 | 0.019 |
| Pool 2 | 0.018 | 0.019 | 0.029 | 0.030 | 0.020 | 0.021 | 0.031 | 0.034 | 0.032 | 0.036 | 0.050 | 0.040 | |
| Pool 3 | 0.016 | 0.016 | 0.036 | 0.031 | 0.020 | 0.021 | 0.039 | 0.032 | 0.034 | 0.038 | 0.059 | 0.042 | |
| Pool 4 | 0.014 | 0.021 | 0.025 | 0.027 | 0.019 | 0.035 | 0.025 | 0.029 | 0.029 | 0.031 | 0.045 | 0.034 | |
| Pool 5 | 0.027 | 0.041 | 0.050 | 0.036 | 0.051 | 0.102 | 0.119 | 0.100 | 0.024 | 0.025 | 0.028 | 0.024 | |
| Pool 6 | - | - | - | - | - | - | - | - | - | - | - | - | |
| AAD (m) | Pool 1 | 0.006 | 0.006 | 0.003 | 0.005 | 0.006 | 0.006 | 0.003 | 0.005 | 0.005 | 0.009 | 0.016 | 0.013 |
| Pool 2 | 0.010 | 0.011 | 0.015 | 0.021 | 0.013 | 0.013 | 0.015 | 0.021 | 0.020 | 0.023 | 0.040 | 0.031 | |
| Pool 3 | 0.010 | 0.011 | 0.019 | 0.022 | 0.013 | 0.014 | 0.020 | 0.023 | 0.021 | 0.025 | 0.043 | 0.031 | |
| Pool 4 | 0.006 | 0.009 | 0.011 | 0.015 | 0.008 | 0.013 | 0.014 | 0.017 | 0.017 | 0.020 | 0.024 | 0.022 | |
| Pool 5 | 0.006 | 0.010 | 0.017 | 0.015 | 0.012 | 0.021 | 0.034 | 0.023 | 0.012 | 0.014 | 0.012 | 0.013 | |
| Pool 6 | - | - | - | - | - | - | - | - | - | - | - | - | |
| T (h) | Gate 1 | 6.5 | 10.2 | 10.3 | 10.3 | 6.5 | 10.2 | 10.3 | 10.3 | 5.7 | 10.2 | 10.2 | 10.2 |
| Gate 2 | 6.6 | 10.2 | 10.3 | 10.3 | 6 | 10.2 | 10.3 | 10.3 | 5.7 | 10.3 | 10.5 | 10.3 | |
| Gate 3 | 5.7 | 10.2 | 10.3 | 10.3 | 5.3 | 10.2 | 10.3 | 10.3 | 6.2 | 10.3 | 10.5 | 10.5 | |
| Gate 4 | 5.2 | 10.2 | 10.3 | 10.3 | 5.2 | 10.2 | 10.3 | 10.3 | 6.8 | 10.5 | 10.5 | 10.5 | |
| Gate 5 | 5.5 | 10.2 | 10.2 | 10.2 | 5.5 | 10.2 | 10.2 | 10.2 | 7.8 | 10.5 | 10.5 | 10.5 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, L.; Lei, X.; Wang, H.; Long, Y.; Lu, L.; Yang, Q. A Model Predictive Water-Level Difference Control Method for Automatic Control of Irrigation Canals. Water 2019, 11, 762. https://doi.org/10.3390/w11040762
Kong L, Lei X, Wang H, Long Y, Lu L, Yang Q. A Model Predictive Water-Level Difference Control Method for Automatic Control of Irrigation Canals. Water. 2019; 11(4):762. https://doi.org/10.3390/w11040762
Chicago/Turabian StyleKong, Lingzhong, Xiaohui Lei, Hao Wang, Yan Long, Longbin Lu, and Qian Yang. 2019. "A Model Predictive Water-Level Difference Control Method for Automatic Control of Irrigation Canals" Water 11, no. 4: 762. https://doi.org/10.3390/w11040762
APA StyleKong, L., Lei, X., Wang, H., Long, Y., Lu, L., & Yang, Q. (2019). A Model Predictive Water-Level Difference Control Method for Automatic Control of Irrigation Canals. Water, 11(4), 762. https://doi.org/10.3390/w11040762