Hydrological Modeling Approach Using Radar-Rainfall Ensemble and Multi-Runoff-Model Blending Technique



Abstract
:1. Introduction
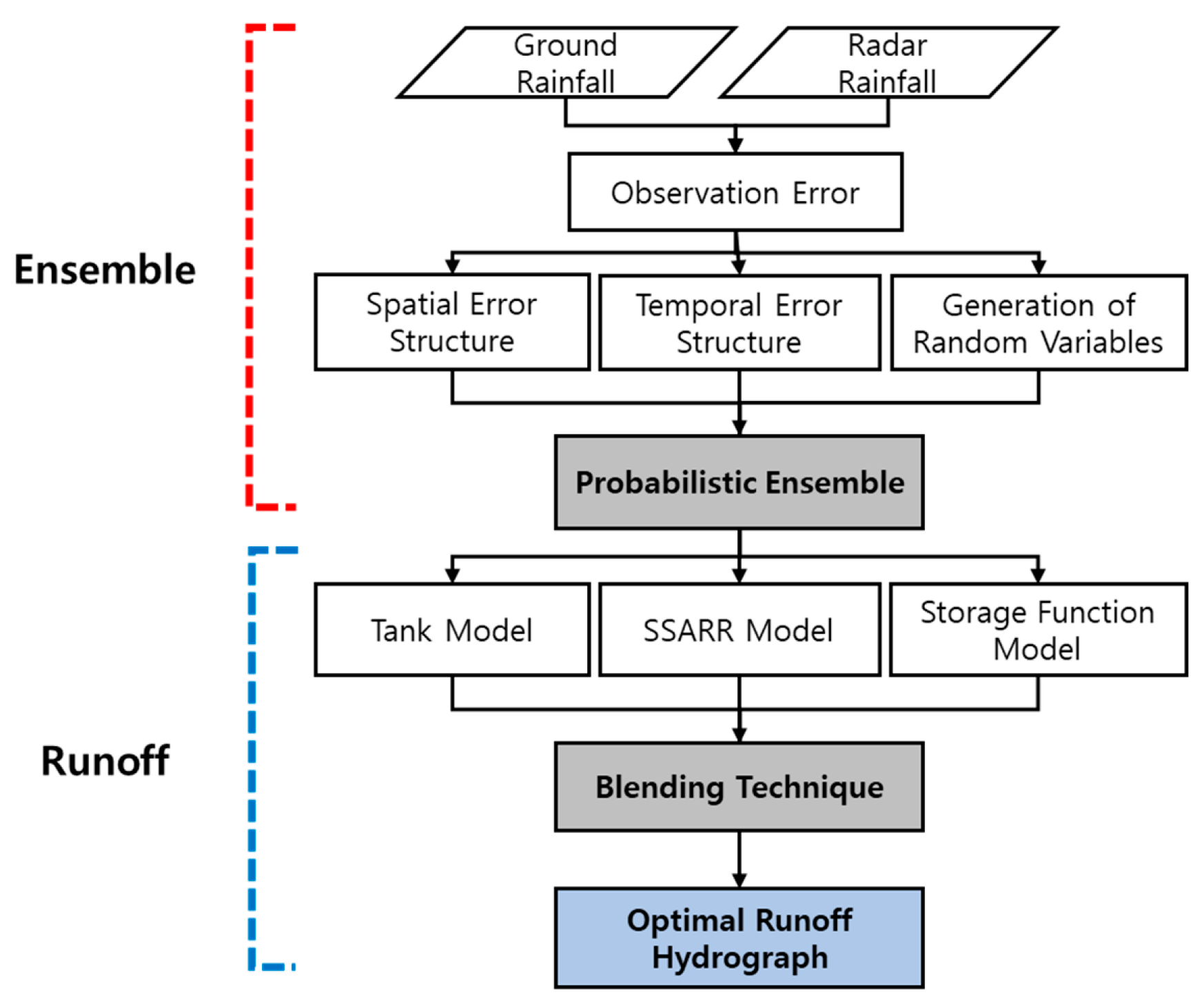
2. Methodology
2.1. Rainfall Ensemble Technique
- = the rainfall ensemble at time t (mm/h);
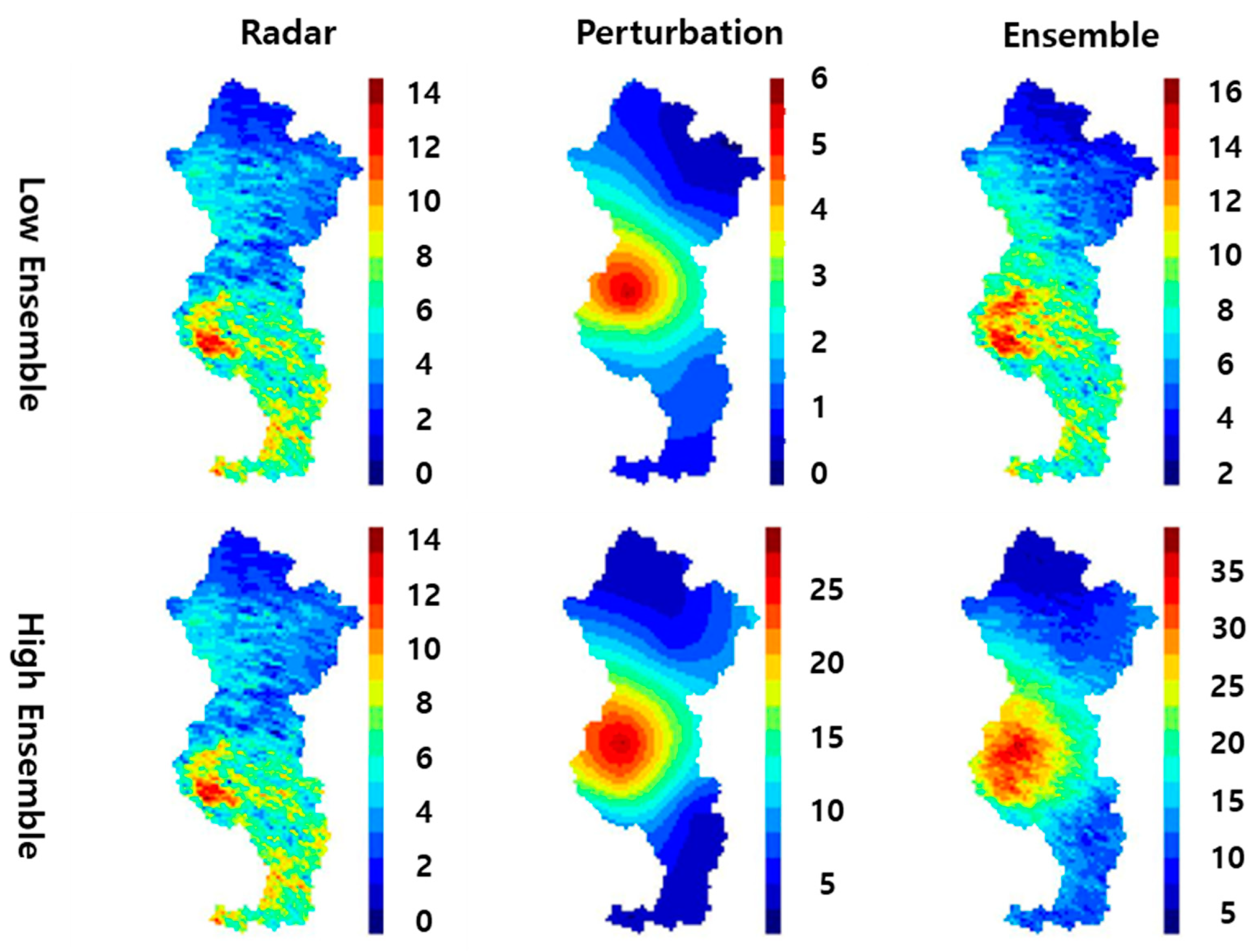
- = the radar data at time t (mm/h);
- = the ith perturbation generated at time t given the spatiotemporal errors of radar rainfall (mm/h);
- = the number of perturbations to be generated. More than 50 random numbers should be generated to show the uncertainty of the random error in the radar data [21].
- = the ratio of ground rainfall to radar rainfall, the observation error at time t (dBR);
- and = the rain-gauge rainfall and radar rainfall at time t expressed in units of rainfall intensity (mm/h).
- k = the location of the observation station in the watershed;
- = the number of time step;
- = the location of the radar grid corresponding to observation point k;
- = the observation error at k and time t (dBR);
- = the weight of observation error at k and time t (dBR);
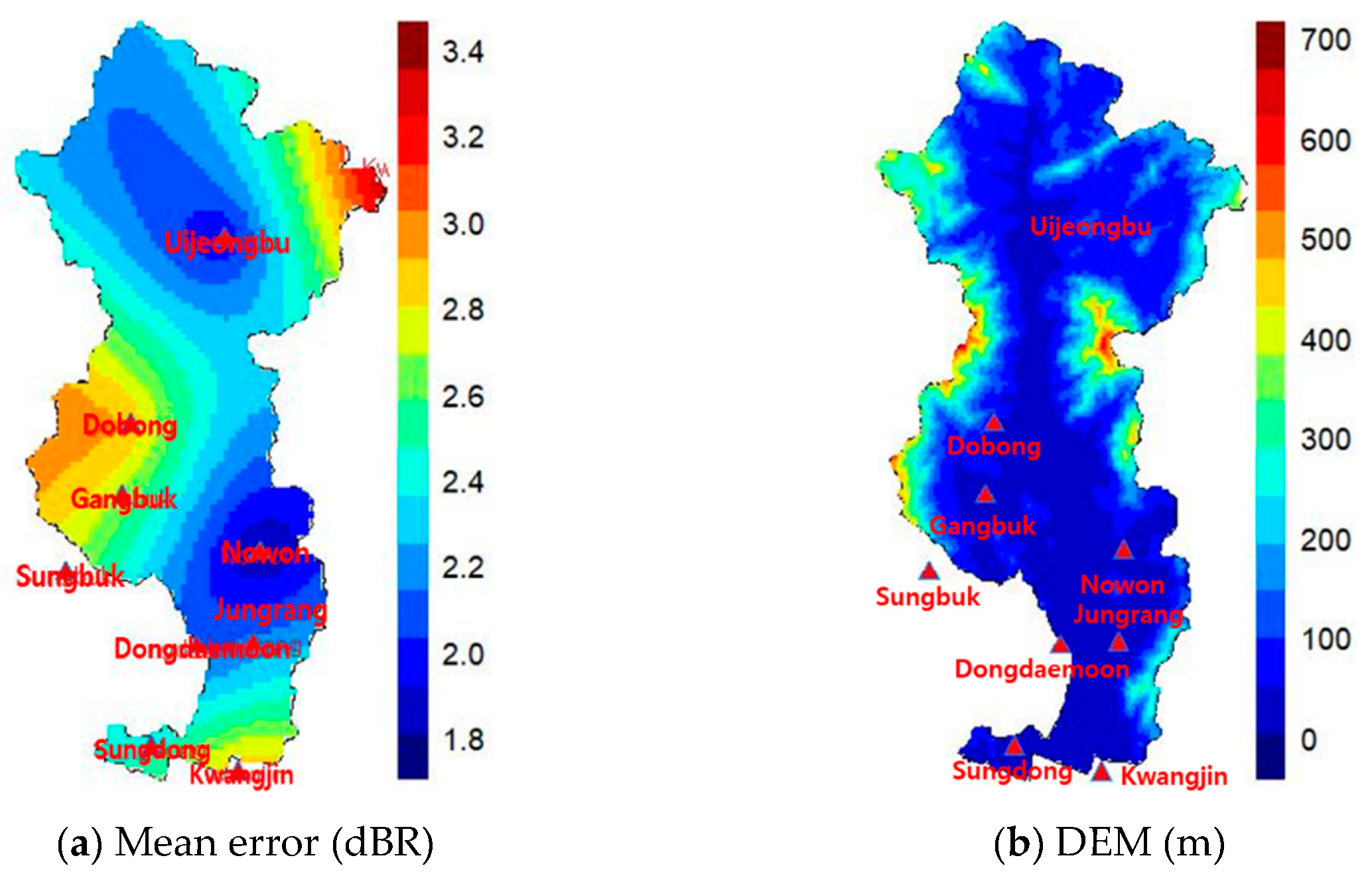
- = the mean error at observation point k (dBR).
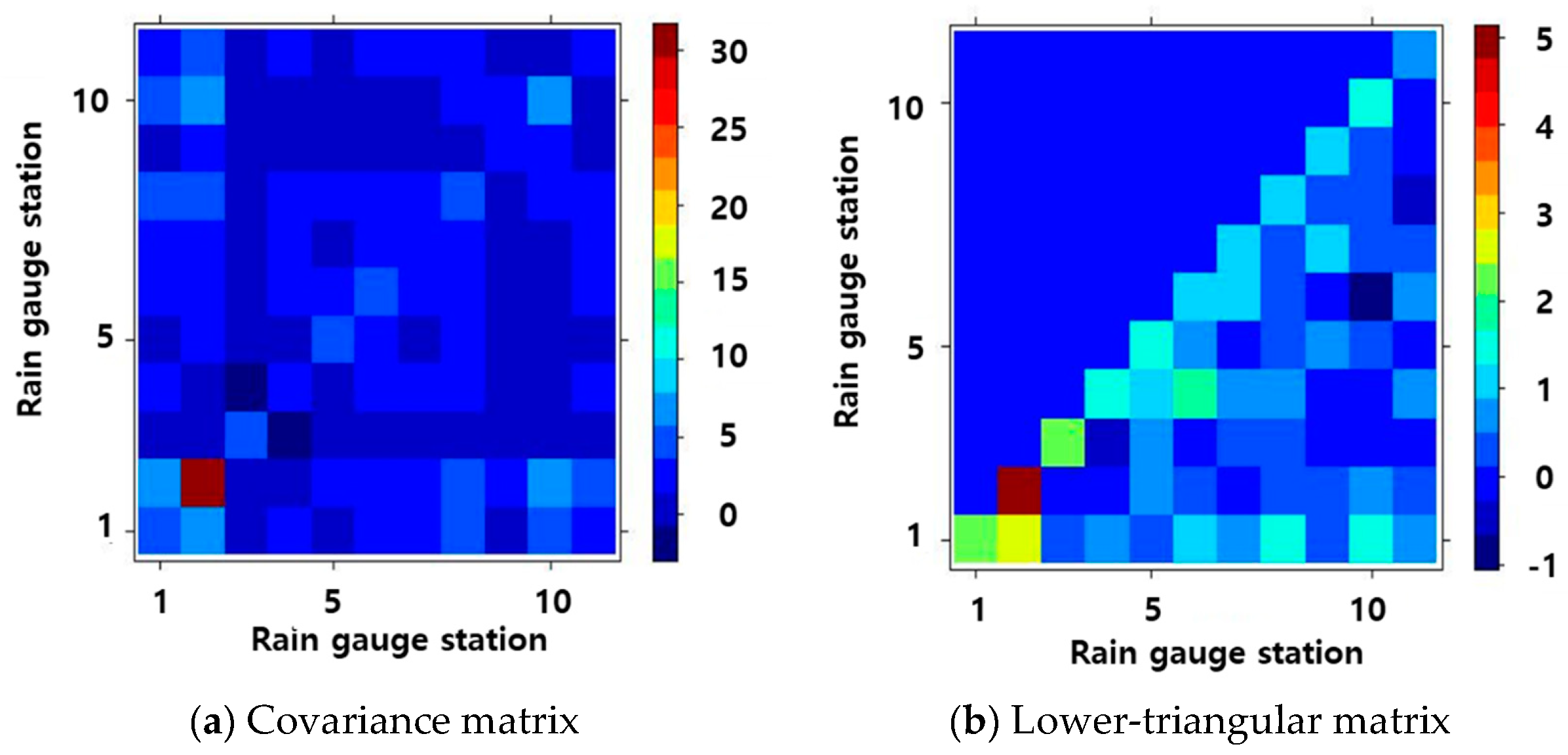
- = the variance at point k;
- = the covariance between point k and l;
- = the number of time step.
- = Symmetric matrix;
- = Lower triangular matrix.
- = the mean error calculated by the kriging interpolation technique using (dBR);
- = the random number range from 0 to 1 allocated for the generation of ensembles, which is randomly generated values to represent uncertainty.
- = perturbation field having autocorrelation and the perturbation at time (t−1) and (t−2) (mm/h);
- = parameters estimated by Yule–Walker equations. can be estimated using the time delay correlation coefficient () at point k;
- = rescaling factor calculated as the square root of the variance of the AR(2) model.
2.2. Multiple-Runoff Model
2.2.1. Tank Model
2.2.2. SSARR Model
- = the quantities of inflow and outflow at random time t ();
- = the quantity of storage ();
- = the storage constant.
2.2.3. Storage Function Model
- A = the area of the target watershed ();
- = the quantity of channel inflow ();
- = the quantity of channel outflow ().
2.3. Blending Technique
2.3.1. Multi-Model Super Ensemble (MMSE)
- = the multi-model prediction value at time t ();
- = the flow of the ith model at time t ();
- = the mean flow of the ith model at time t ();
- = the mean observed value ();
- = the regression coefficient of each model of the N number of models, which can be obtained by regression analysis.
2.3.2. Simple Model Average (SMA)
- = the multi-model prediction value at time t obtained by the SMA equation ();
- = the mean observation value during the observation period ();
- = the flow of the ith model at time t ();
- = the mean flow of the ith model during the entire period ().
2.3.3. Mean Squared Error (MSE)
- = the observed flow at time t ();
- = the flow of the ith model at time t ();
- MSE = the mean square error of the ith model, calculated using .
3. Result and Discussion
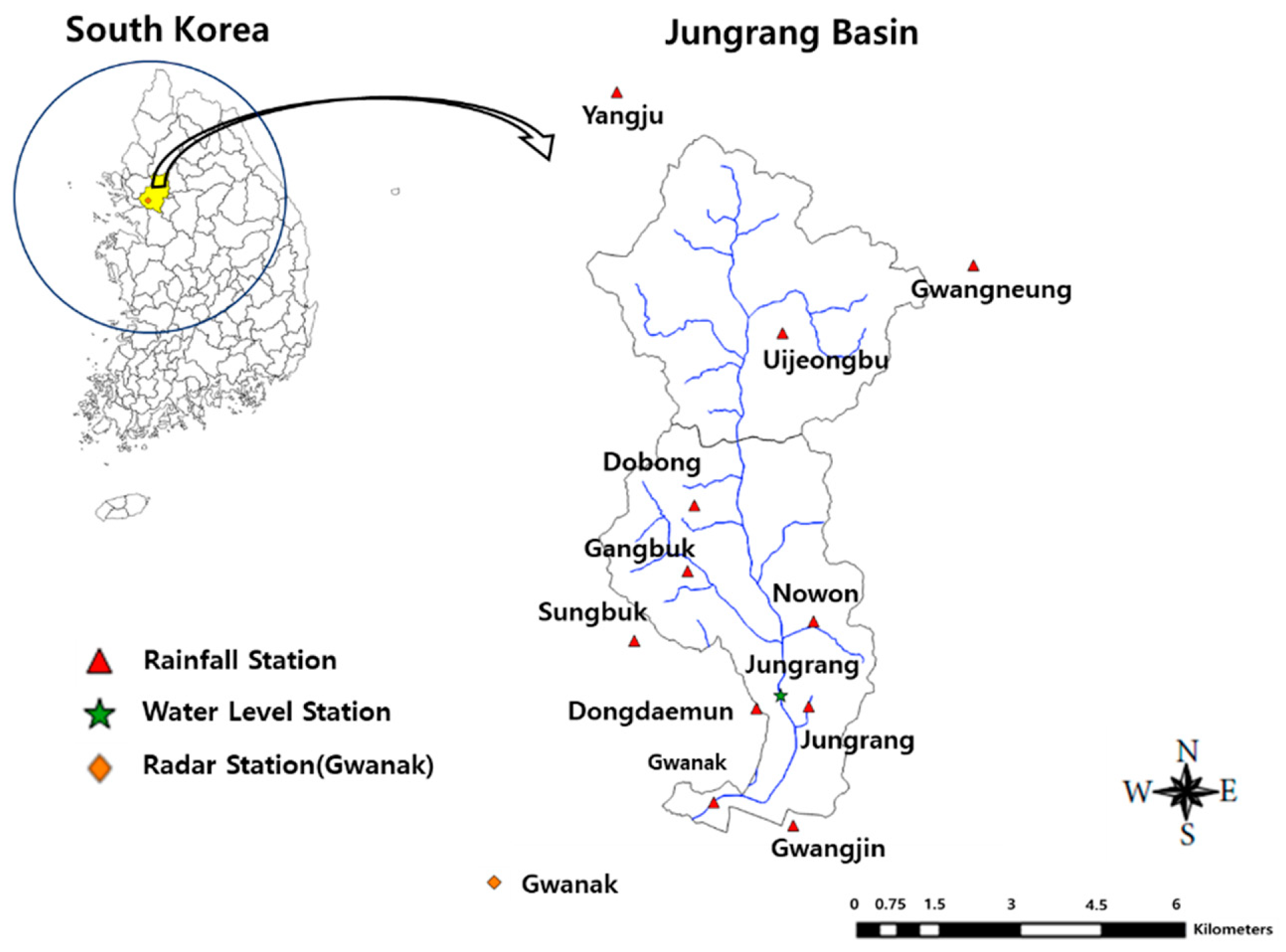
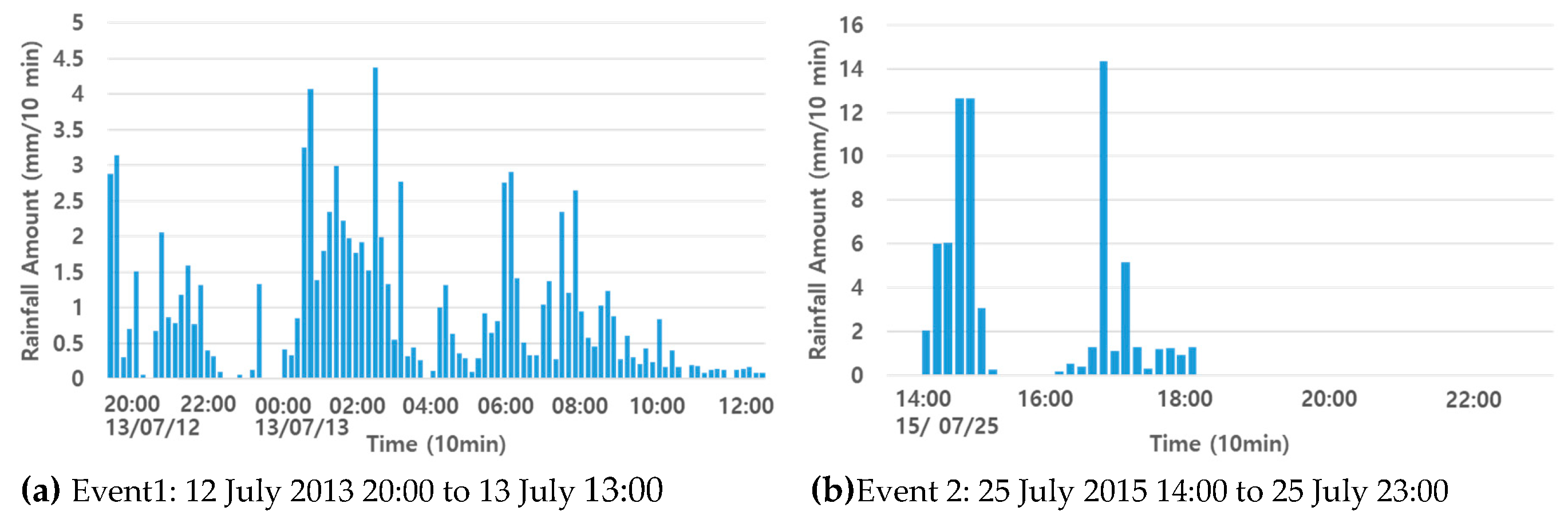
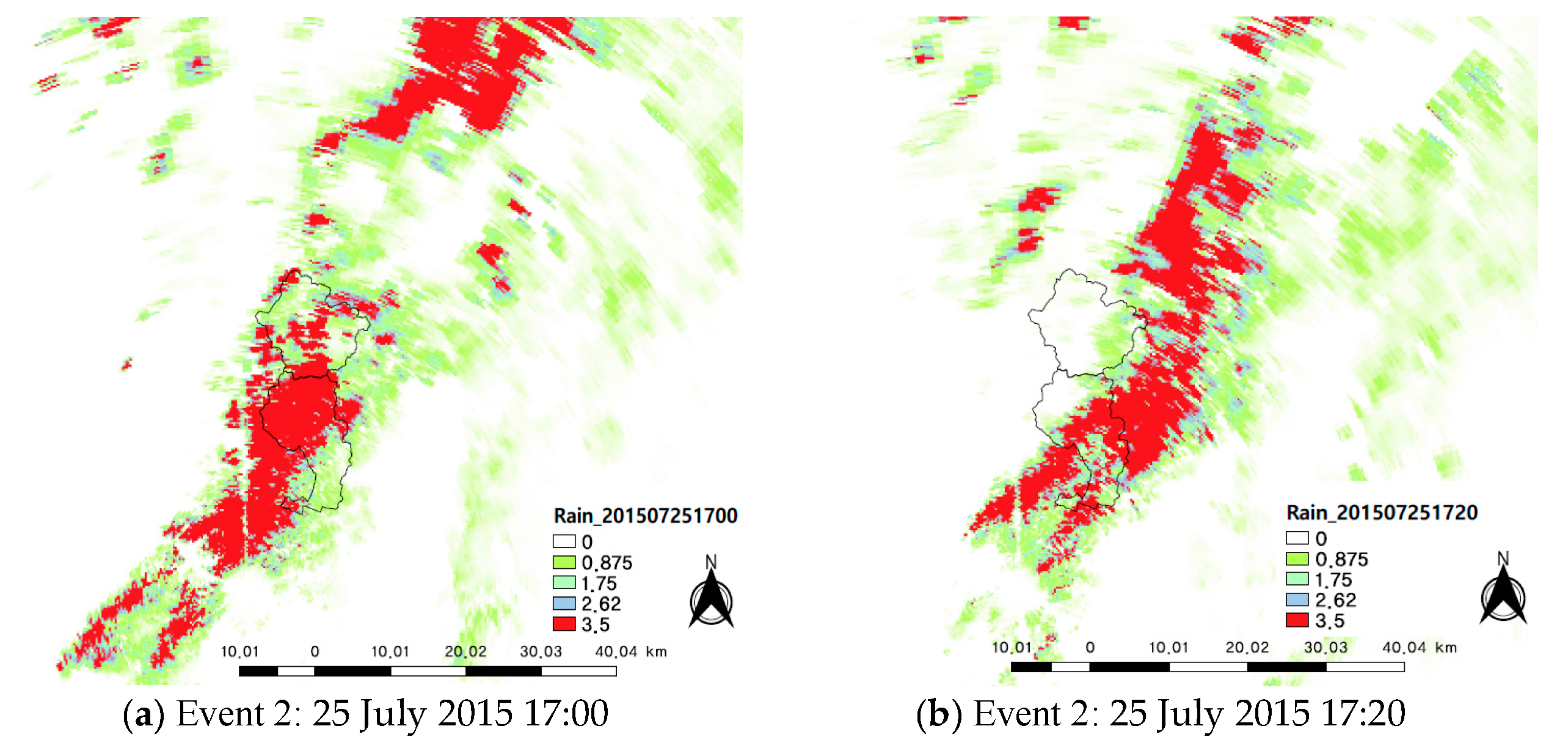
3.1. Study Area and Data Collection
- = the rainfall intensity (mm/h), estimated using the reflectivity (Z, mm6/m)
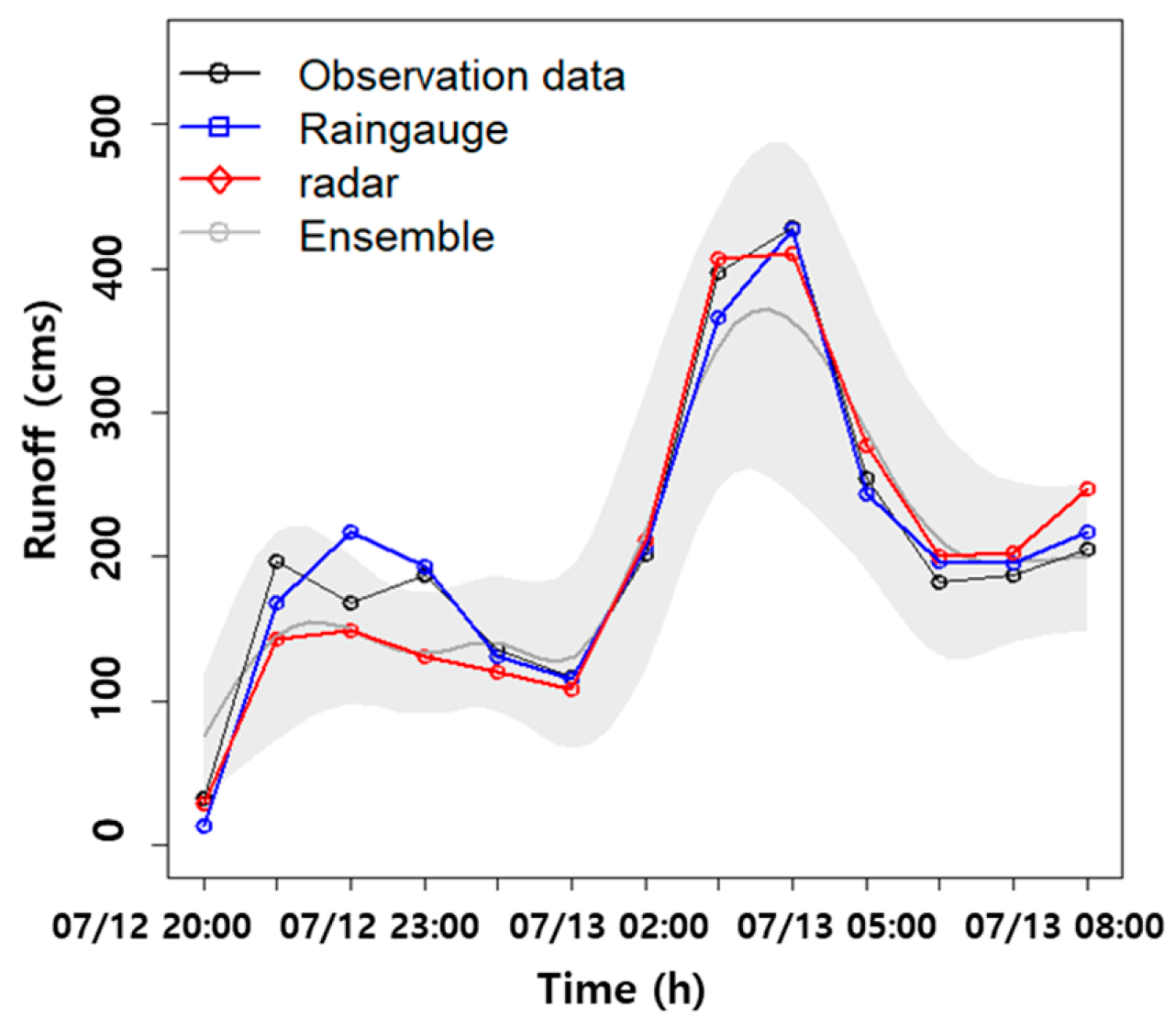
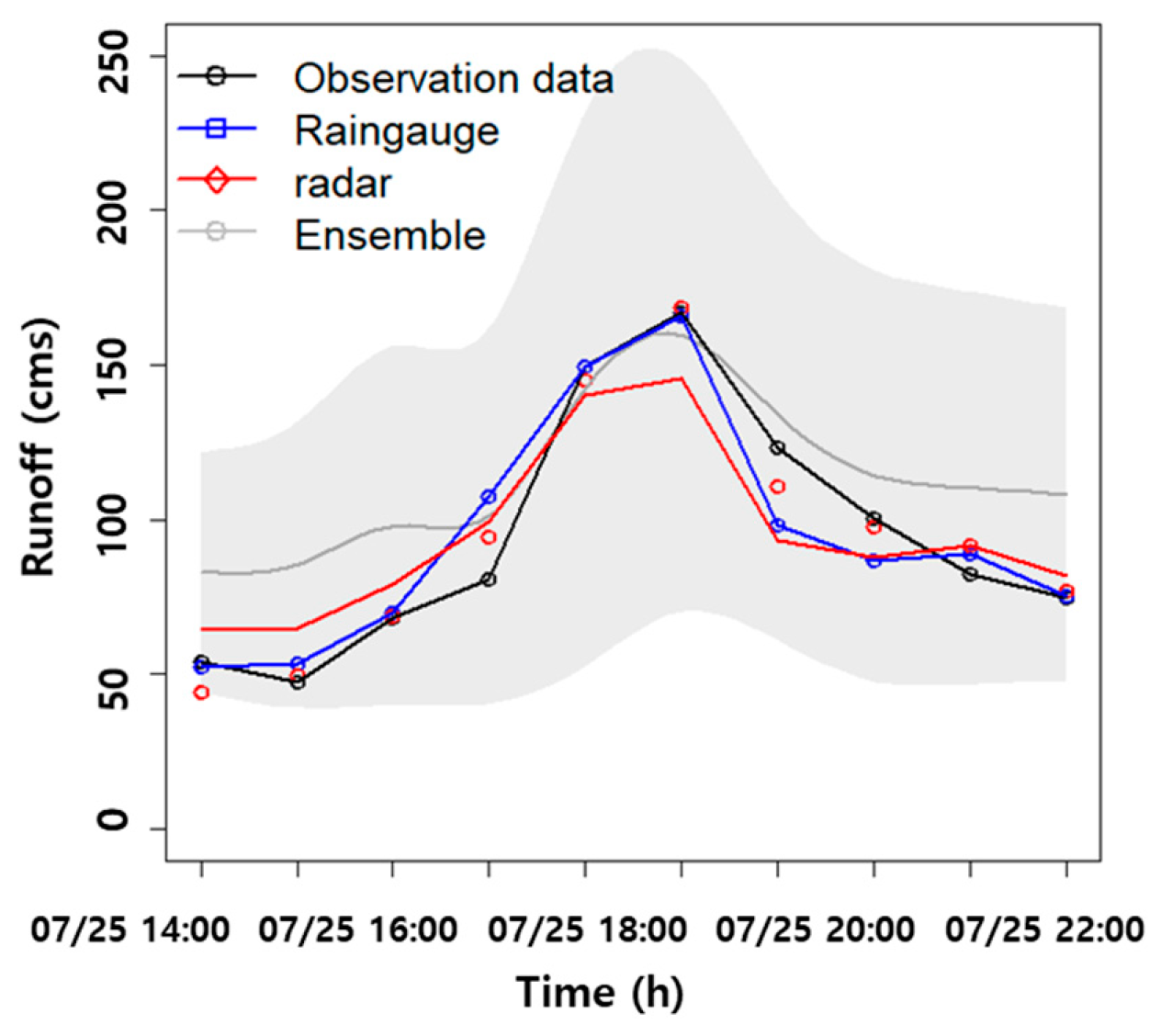
3.2. Generation of Rainfall Ensemble
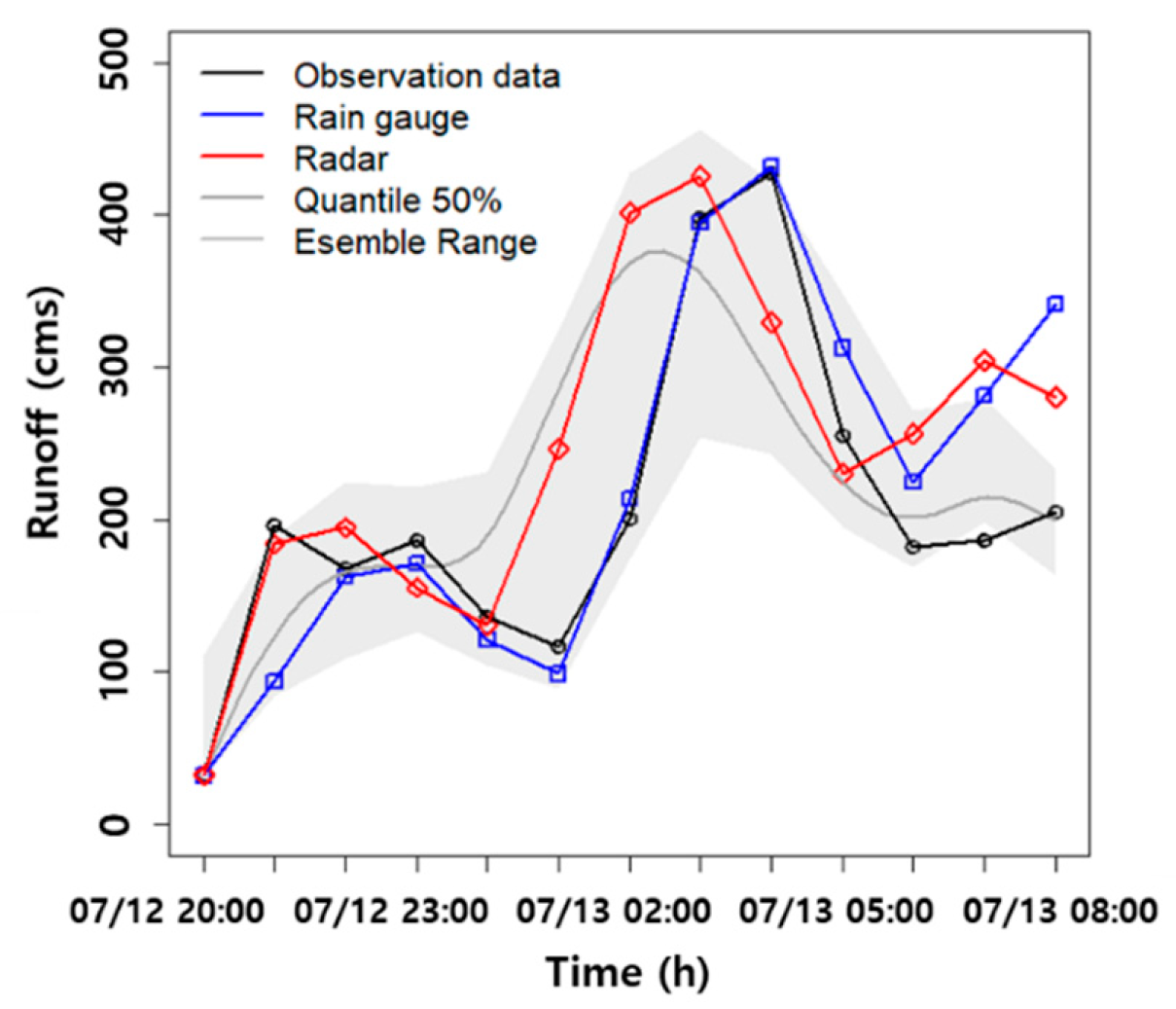
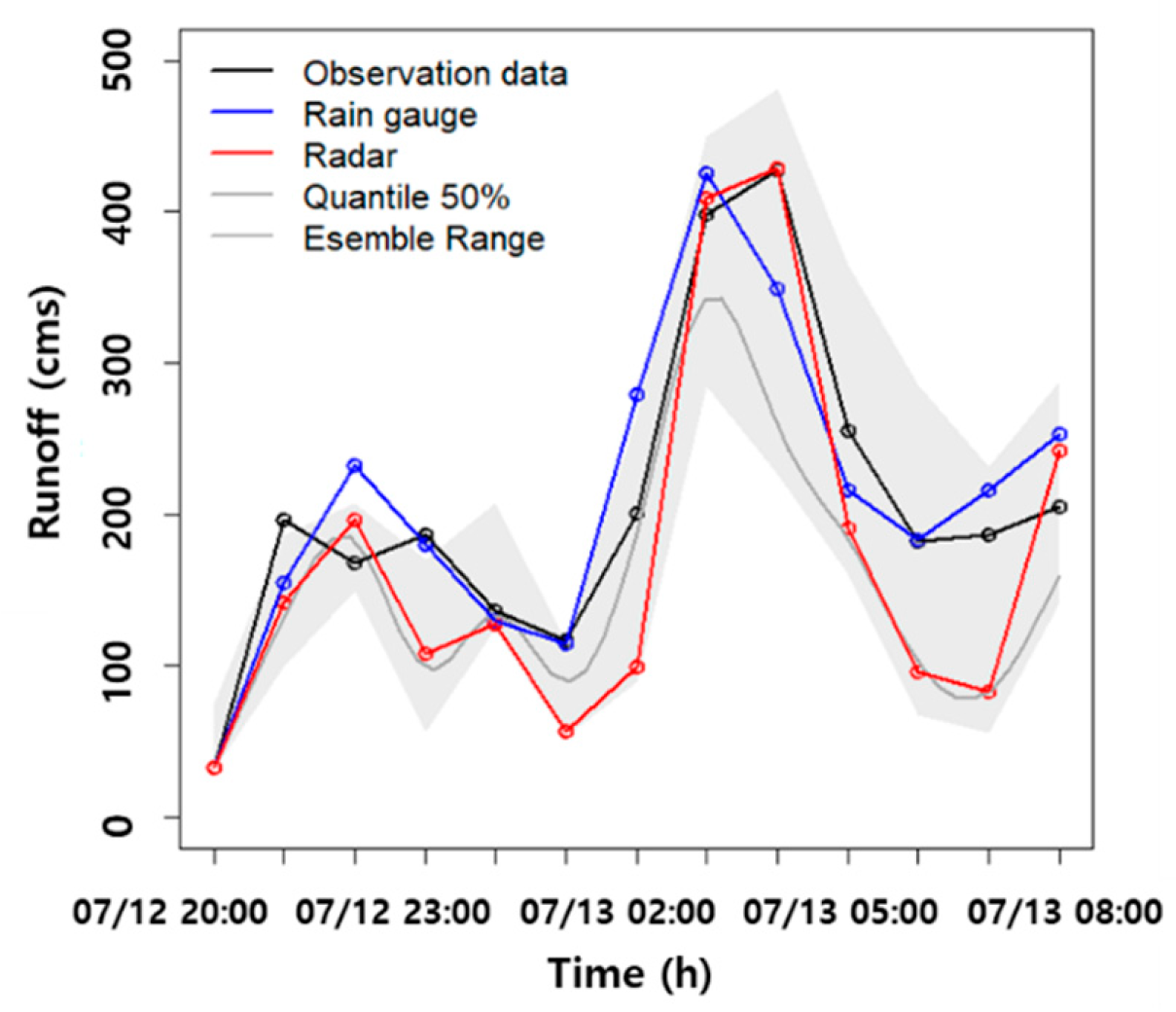
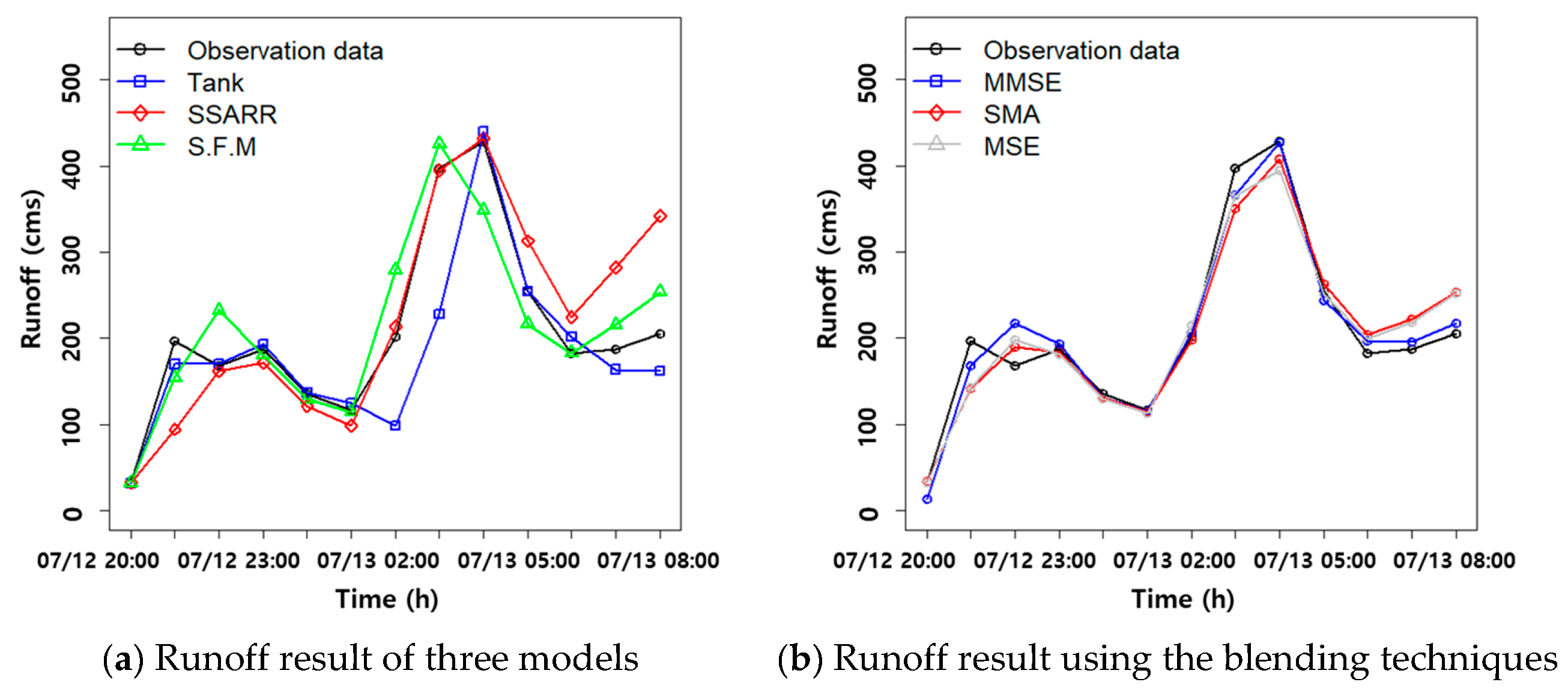
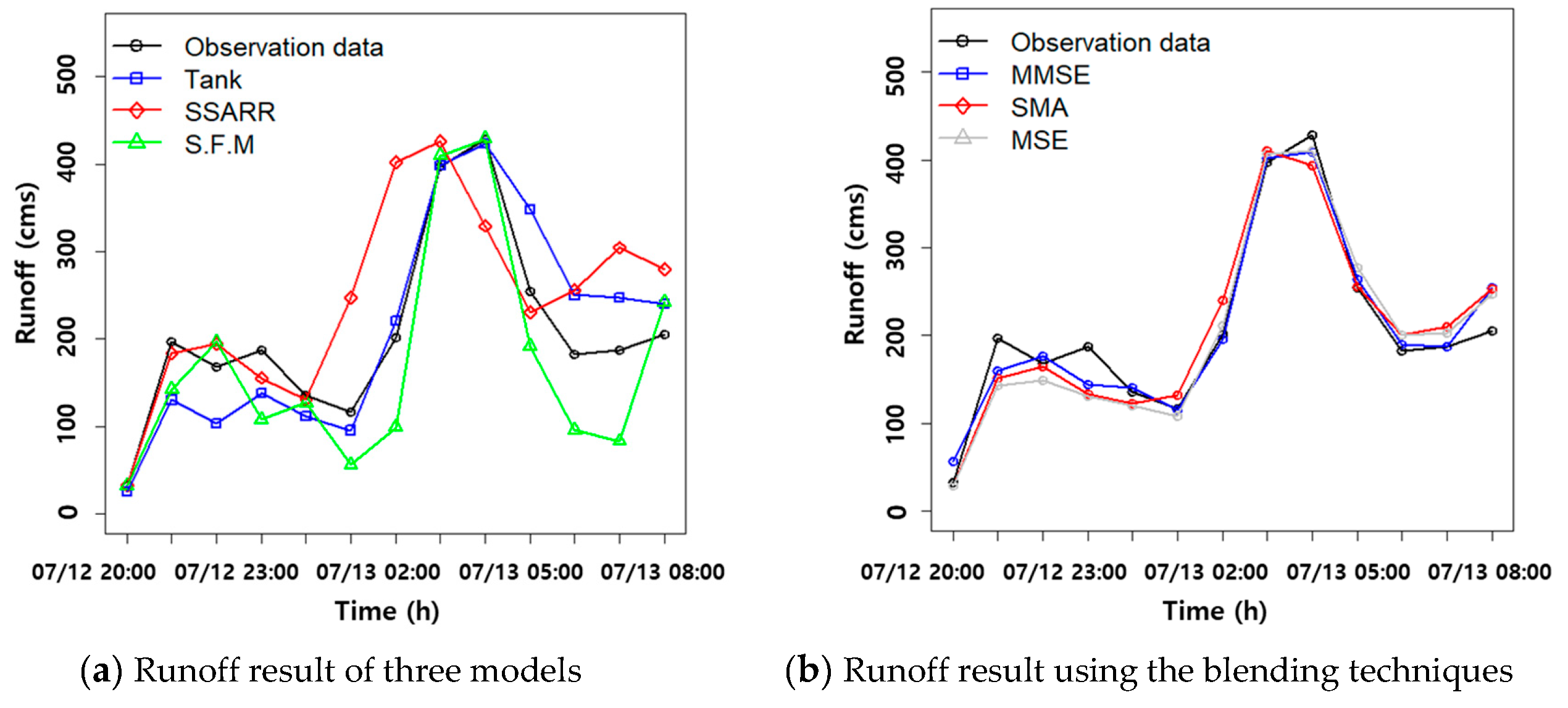
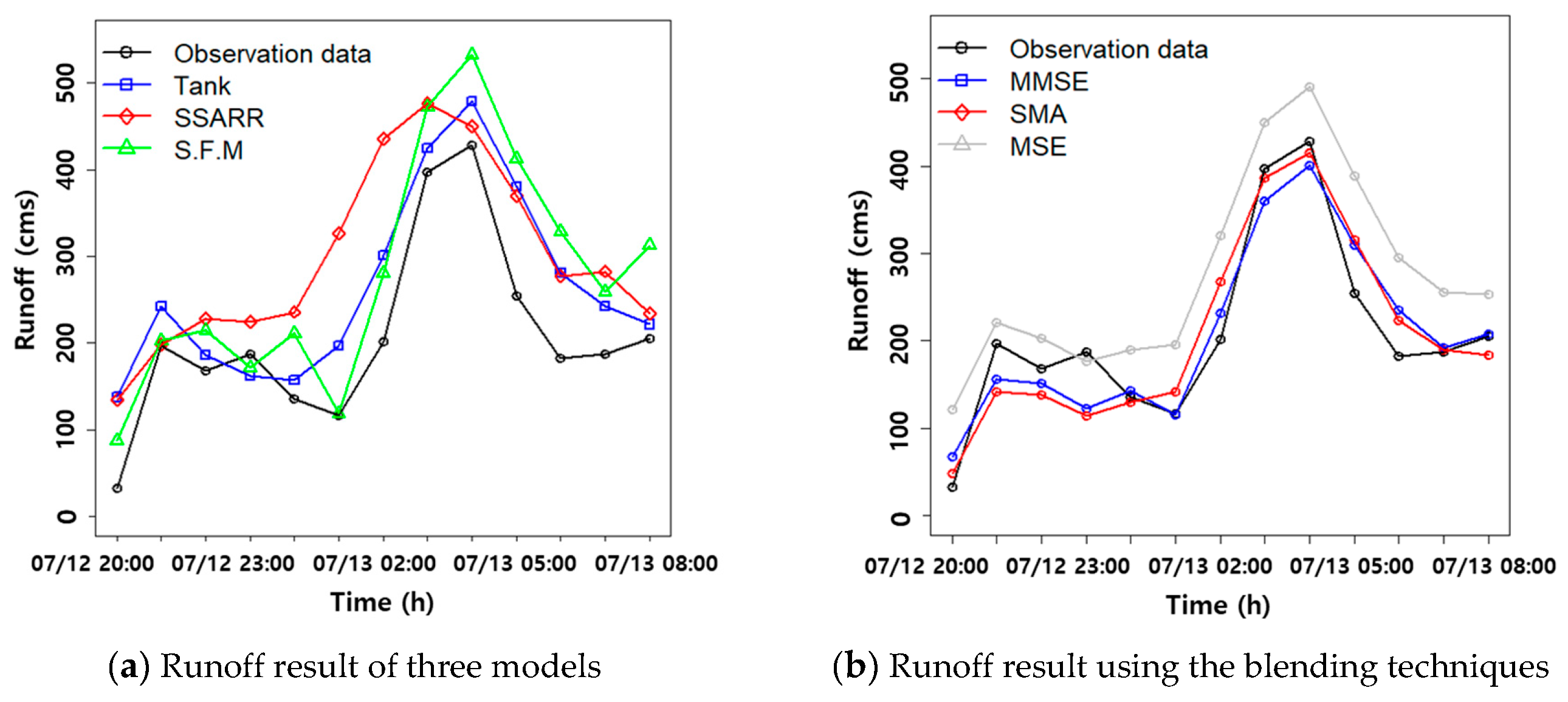
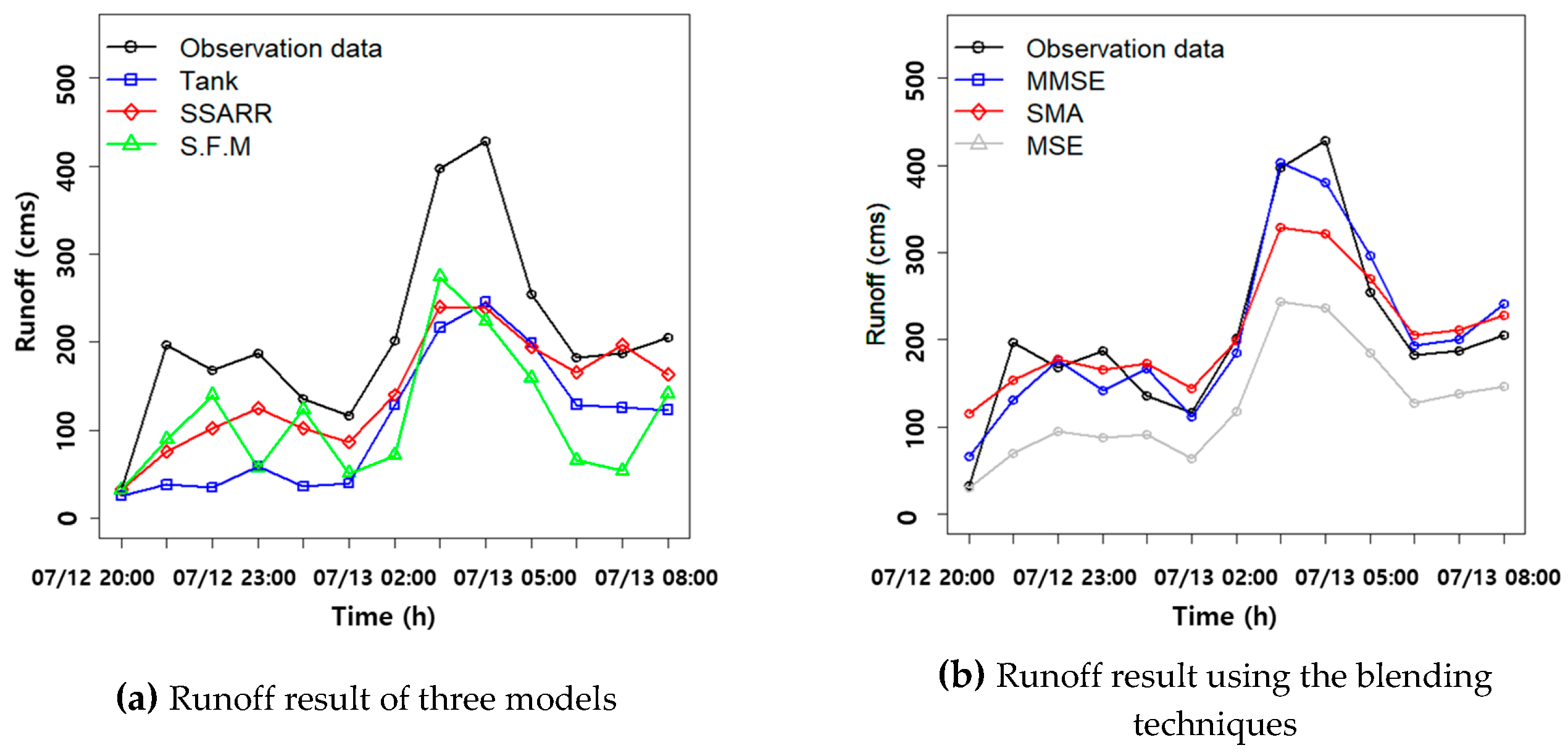
3.3. Runoff Analysis of Multi-Runoff Models
3.4. Estimation of Optimum Runoff Hydrograph Using the Blending Technique
4. Conclusions
- To generate rainfall ensembles, the errors of observed data and the radar data were modeled. The rainfall ensembles showed that the uncertainty of the rainfall ensemble was high when the radar was underestimated, due to topographic effects such as rainfall intensity and mountain shielding;
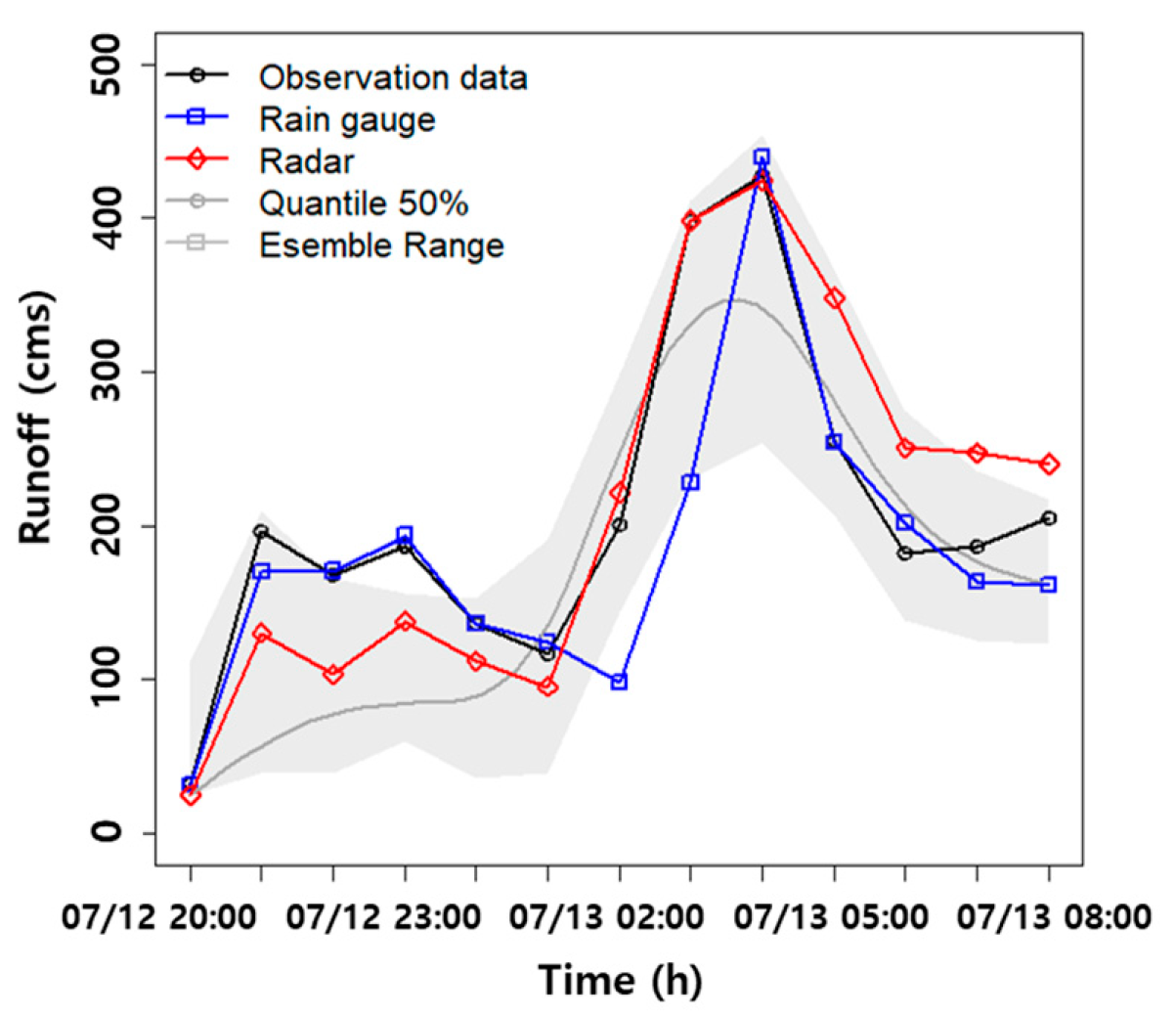
- A runoff analysis was performed to confirm the uncertainty of the runoff models by using station rainfall data, radar rainfall data, and ensemble rainfall data in the tank model, SSARR model, and the storage function model. Even with the same rainfall data, the runoff results of the models were all different, which confirmed the uncertainty of the runoff models;
- To reduce the uncertainty of the runoff models, three integrated runoff curves were generated by applying three blending techniques (MMSE, SMA, and MSE) to the runoff results of the three models. The results showed that the MMSE blending runoff curve showed an error of around 5.1%, compared to the observed runoff when using the station rainfall data, and around 9.2%, compared to the observed runoff using the radar rainfall data. Therefore, the MMSE blending technique was selected as the optimum runoff hydrograph;
- A verification event was used to confirm the results. The MMSE technique showed the best result with an error margin of 7.03–9.46%, while the MSE technique showed the highest uncertainty with an error margin of 11.31–46.93%.
Author Contributions
Funding
Conflicts of Interest
References
- Kim, S.; Noh, H.; Jung, J.; Jun, H.; Kim, H.S. Assessment of the impacts of global climate change and regional water projects on streamflow characteristics in the Geum River Basin in Korea. Water 2016, 8, 91. [Google Scholar] [CrossRef]
- Kim, D.; Kim, J.; Joo, H.; Han, D.; Kim, H.S. Future water quality analysis of the Anseongcheon River basin, Korea under climate change. Membr. Water Treat. 2019, 10, 1–11. [Google Scholar]
- Chiang, Y.M.; Chang, F.J.; Jou, B.J.; Lin, P.F. Dynamic ANN for precipitation estimation and forecasting from radar observations. J. Hydrol. 2007, 334, 250–261. [Google Scholar] [CrossRef]
- Seck, I.; Van Baelen, J. Geostatistical Merging of a Single-Polarized X-Band Weather Radar and a Sparse Rain Gauge Network over an Urban Catchment. Atmosphere 2018, 9, 496. [Google Scholar] [CrossRef]
- Adirosi, E.; Roberto, N.; Montopoli, M.; Gorgucci, E.; Baldini, L. Influence of disdrometer type on weather radar algorithms from measured DSD: Application to Italian climatology. Atmosphere 2018, 9, 360. [Google Scholar] [CrossRef]
- Kuriqi, A.L. Assessment and quantification of meteorological data for implementation of weather radar in mountainous regions. Mausam 2016, 67, 789–802. [Google Scholar]
- Kang, N.-R.; Noh, H.-S.; Lee, J.-S.; Lim, S.-H.; Kim, H.-S. Runoff simulation of an urban drainage system using radar rainfall data. J. Wetl. Res. 2013, 15, 413–422. [Google Scholar] [CrossRef]
- Kim, S.; Noh, H.; Kang, N.; Lee, K.; Kim, Y.; Lim, S.; Kim, H.S. Noise reduction analysis of radar rainfall using chaotic dynamics and filtering techniques. Adv. Meteorol. 2014, 2014. [Google Scholar] [CrossRef]
- Priestley, M.B. Spectral Analysis and Time Series; Academic Press: London, UK, 1981. [Google Scholar]
- Germann, U.; Berenguer, M.; Sempere-Torres, D.; Salvade, G. Ensemble radar precipitation estimation-A new topic on the radar horizon. In Proceedings of the Fourth European Conference on Radar in Meteorology and Hydrology, Barcelona, Spain, 18–22 September 2006; pp. 18–22. [Google Scholar]
- Germann, U.; Berenguer, M.; Sempere-Torres, D.; Zappa, M. REAL-Ensemble radar precipitation estimation for hydrology in a mountainous region. Q. J. R. Meteorol. Soc. 2009, 135, 445–456. [Google Scholar] [CrossRef]
- Dai, Q.; Han, D.; Rico-Ramirez, M.A.; Islam, T. Modelling radar-rainfall estimation uncertainties using elliptical and Archimedean copulas with different marginal distributions. Hydrol. Sci. J. 2014, 59, 1992–2008. [Google Scholar] [CrossRef]
- Kang, N.-R.; Joo, H.-J.; Lee, M.-J.; Kim, H.-S. Generation of radar rainfall ensemble using probabilistic approach. J. Korea Water Resour. Assoc. 2017, 50, 155–167. [Google Scholar]
- Bates, J.M.; Granger, C.W.J. The combination of forecasts. J. Oper. Res. Soc. 1969, 20, 451–468. [Google Scholar] [CrossRef]
- Al-Safi, H.I.J.; Kazemi, H.; Sarukkalige, P.R. Comparative study of conceptual versus distributed hydrologic modelling to evaluate the impact of climate change on future runoff in unregulated catchments. J. Water Clim. Chang. 2019. [Google Scholar] [CrossRef]
- Al-Safi, H.I.J.; Sarukkalige, P.R. The application of conceptual modelling to assess the impacts of future climate change on the hydrological response of the Harvey River catchment. J. Hydro-Environ. Res. 2018. [Google Scholar] [CrossRef]
- Mcleod, I.; Noakes, D.; Hipel, K.W.; Thompstone, R.M. Combining hydrologic forecasts. J. Water Resour. Plan. Manag. 1987, 113, 29–41. [Google Scholar] [CrossRef]
- Georgakakos, K.P.; Seo, D.-J.; Gupta, H.; Schaake, J.; Butts, M.B. Towards the characterization of streamflow simulation uncertainty through multimodel ensembles. J. Hydrol. 2004, 298, 222–241. [Google Scholar] [CrossRef]
- Li, W.; Sankarasubramanian, A. Reducing hydrologic model uncertainty in monthly streamflow predictions using multimodel combination. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Ajami, N.K.; Duan, Q.; Gao, X.; Sorooshian, S. Multimodel combination techniques for analysis of hydrological simulations. J. Hydrometeorol. 2006, 7, 755–768. [Google Scholar] [CrossRef]
- Kim, J.S.; Yoon, S.K.; Moon, Y.I. Development of rating curve for high water level in an urban stream using Monte Carlo simulation. J. Korean Soc. Civ. Eng. 2013, 33, 1433–1446. [Google Scholar] [CrossRef]
- Dai, Q.; Han, D.; Zhuo, L.; Zhang, J.; Islam, T.; Srivastava, P.K. Seasonal ensemble generator for radar rainfall using copula and autoregressive model. Stoch. Environ. Res. Risk Assess. 2016, 30, 27–38. [Google Scholar] [CrossRef]
- Sugawara, M. On the analysis of runoff structures about several Japanese rivers. Jpn. J. Geophys. 1961, 2, 1–76. [Google Scholar]
- Lee, A.; Cho, S.; Kang, D.K.; Kim, S. Analysis of the effect of climate change on the Nakdong river stream flow using indicators of hydrological alteration. J. Hydro-Environ. Res. 2014, 8, 234–247. [Google Scholar] [CrossRef]
- Paik, K.-R.; Kim, J.-H.; Kim, H.-S.; Lee, D.-R. A conceptual rainfall-runoff model considering seasonal variation. Hydrol. Process. 2005, 19, 3837–3850. [Google Scholar] [CrossRef]
- Kim, J.; Kim, D.; Joo, H.; Noh, H.; Lee, J.; Kim, H.S. Case study: On objective functions for the peak flow calibration and for the representative parameter estimation of the basin. Water 2018, 10, 614. [Google Scholar] [CrossRef]
- Kimura, T. The Flood Runoff Analysis Method by the Storage Function Model; The Public Works Research Institute, Ministry of Construction: Tsukuba, Japan, 1961.
- Krishnamurti, T.N.; Kishtawal, C.M.; Zhang, Z.; LaRow, T.; Bachiochi, D.; Williford, E.; Surendran, S. Multimodel ensemble forecasts for weather and seasonal climate. J. Clim. 2000, 3, 4196–4216. [Google Scholar] [CrossRef]
- Lee, G.; Zawadzki, I. Radar calibration by gage, disdrometer, and polarimetry: Theoretical limit caused by the variability of drop size distribution and application to fast scanning operational radar data. J. Hydrol. 2006, 328, 83–97. [Google Scholar] [CrossRef]
- Kwon, S.; Lee, G.; Jung, S.H.; Park, H.S.; Suk, M.K.; Cha, J.W.; Lee, C.K. Evaluation Radar and KNU QPE Algorithm. In Proceedings of the International Weather Radar Workshop, Daegu, Korea, 1–2 November 2012. [Google Scholar]
- Lyu, G.; Jung, S.H.; Nam, K.Y.; Kwon, S.; Lee, C.R.; Lee, G. Improvement of radar rainfall estimation using radar reflectivity data from the hybrid lowest elevation angles. J. Korean Earth Sci. Soc. 2015, 36, 109–124. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rainfall Event | 12 July 2013 20:00 to 13 July 13:00/ 25 July 2015 14:00 to 25 July 23:00 | |
| Rainfall Station | Yangju, Gwangneung, Uijeongbu, Dongdaemun, Dobong, Gangbuk, Nowon, Sungbuk, Jungrang, Sungdong, Gwangjin | |
| Radar data: KWK Radar | Latitude, longitude | 37.4439°, 126.9639° |
| Spatial resolution | 250 m | |
| Scam elevation | 0°, 0.4°, 0.8°, 1.2°, 1.6°, 2.0°, 3.0°, 4.2°, 5.7°, 7.5°, 9.8°, 12.5° | |
| Radar height | 641 m | |
| Wave length | 11 cm | |
| Beam width | 0.9° | |
| Index | R2 | RMSE | |||
|---|---|---|---|---|---|
| Model | Rain Gauge | Radar | Rain Gauge | Radar | |
| Tank model | 0.86 | 0.92 | 57.57 | 48.60 | |
| SSARR model | 0.88 | 0.72 | 58.30 | 85.47 | |
| Storage function model | 0.91 | 0.92 | 42.83 | 60.67 | |
| Blending | MMSE | SMA | MSE | |
|---|---|---|---|---|
| Index | ||||
| MAE | 9.420 | 14.874 | 12.486 | |
| RMSE | 16.279 | 20.885 | 20.243 | |
| MAPE | 0.051 | 0.084 | 0.061 | |
| Blending | MMSE | SMA | MSE | |
|---|---|---|---|---|
| Index | ||||
| MAE | 14.859 | 28.001 | 26.665 | |
| RMSE | 19.757 | 33.496 | 33.209 | |
| MAPE | 0.092 | 0.161 | 0.141 | |
| Blending | MMSE | SMA | MSE | |
|---|---|---|---|---|
| Index | ||||
| MAE | 30.121 | 33.889 | 73.337 | |
| RMSE | 34.607 | 39.996 | 82.431 | |
| MAPE | 0.230 | 0.200 | 0.563 | |
| Blending | MMSE | SMA | MSE | |
|---|---|---|---|---|
| Index | ||||
| MAE | 13.611 | 25.562 | 49.102 | |
| RMSE | 17.535 | 30.723 | 57.938 | |
| MAPE | 0.171 | 0.307 | 0.469 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, M.; Kang, N.; Joo, H.; Kim, H.S.; Kim, S.; Lee, J. Hydrological Modeling Approach Using Radar-Rainfall Ensemble and Multi-Runoff-Model Blending Technique. Water 2019, 11, 850. https://doi.org/10.3390/w11040850
Lee M, Kang N, Joo H, Kim HS, Kim S, Lee J. Hydrological Modeling Approach Using Radar-Rainfall Ensemble and Multi-Runoff-Model Blending Technique. Water. 2019; 11(4):850. https://doi.org/10.3390/w11040850
Chicago/Turabian StyleLee, Myungjin, Narae Kang, Hongjun Joo, Hung Soo Kim, Soojun Kim, and Jongso Lee. 2019. "Hydrological Modeling Approach Using Radar-Rainfall Ensemble and Multi-Runoff-Model Blending Technique" Water 11, no. 4: 850. https://doi.org/10.3390/w11040850
APA StyleLee, M., Kang, N., Joo, H., Kim, H. S., Kim, S., & Lee, J. (2019). Hydrological Modeling Approach Using Radar-Rainfall Ensemble and Multi-Runoff-Model Blending Technique. Water, 11(4), 850. https://doi.org/10.3390/w11040850