1. Introduction
The autonomous navigation of agricultural machinery can not only solve the problem of insufficient labor force, but also reduce energy consumption, reduce costs and improve agricultural production efficiency. However, the accuracy and reliability of agricultural machinery navigation has been restricting the level of autonomous operation of agricultural machinery. Therefore, agricultural machinery navigation technology has become one of the hot topics in current agricultural machinery research.
At present, agricultural machinery navigation methods mainly include machine vision and satellite positioning. Since machine vision is sensitive to the external environment, it is difficult to meet the requirements of autonomous navigation in different environments [
1,
2]. Satellite positioning navigation has become a research hotspot in recent years, but its navigation accuracy needs to be further improved [
3,
4]. Generally speaking, a single navigation mode is limited by a lack of effective information, and it is difficult to continuously provide high-quality location information. Welch et al. [
5] pointed out that, due in large part to advances in digital computing, the Kalman filter has been the subject of extensive research and application, particularly in the area of autonomous or assisted navigation. Kalman filter technology, which can improve positioning accuracy, is widely used in navigation systems, and many attempts at the application of the Kalman filter in navigation have been reported.
Regarding the application of the Kalman filter in the domain of navigation for vehicles, Gao et.al. [
6] proposed a federated Kalman filter algorithm to improve the positioning accuracy of vehicle altitude. In the federated Kalman filter system, the sub-filter acts to improve the accuracy. Fan et al. [
7] used adaptive Kalman filtering for vehicle laser Doppler velocimetry (LDV). It was indicated that adaptive Kalman filtering can improve the accuracy of vehicle LDV. Ko et al. [
8] used an invariant extended Kalman filter for the navigation of an unmanned aerial vehicle. Tradacete et al. [
9] presented a global positioning system for an autonomous electric vehicle. In this paper, two sub-systems are fused to a single system by an extended Kalman filter (EKF), reaching centimeter accuracy.
Regarding the application of the Kalman filter in the domain of object tracking, Kim et al. [
10] presented a multiple-object tracking system whose design is based on multiple Kalman filters dealing with observations from two different kinds of physical sensors (radar and a charge-coupled device camera). Chen et al. [
11] presented an efficient method to integrate various spatial–temporal constraints to regularize the contour tracking. In this paper, an unscented Kalman filter (UKF) is applied to estimate object parameters based on the non-linear observation model and the object dynamics. Li et al. [
12] presented a cost-effective approach to track moving objects around vehicles using linearly arrayed ultrasonic sensors. Two types of tracking algorithms for the sensor array, including an extended Kalman filter (EKF) and an unscented Kalman filter (UKF), were designed for dynamic object tracking; the results showed that both EKF and UKF gave a precise tracking position. Shantaiya et al. [
13] presented the tracking of multiple objects from a given video dataset. Multiple objects can be tracked simultaneously using the Kalman filter and optical flow algorithm.
Regarding the application of the Kalman filter in the domain of inertial navigation systems (INS) and global positioning systems (GPS), Narasimhappa et al. [
14] modified the Sage–Husa adaptive Kalman filter to denoise the fiber optic gyroscope signal in an inertial navigation system (INS). In this work, the random error of the fiber optic gyroscope is modeled using a first order auto regressive model, and the coefficients of the model were used to initialize the transition matrix of the Sage–Husa adaptive Kalman filter. Chen et al. [
15] proposed an adaptive extended Kalman filter on an INS/wireless sensor network (WSN) integration system for mobile robot indoors. Zhao et al. [
16] analyzed the suitable case for the robust Kalman filter in GPS/INS systems, and the filter characteristics including parameter setting, parameter meaning, and filter convergence condition are discussed simultaneously. Liu et al. [
17] proposed an information fusion method based on the adaptive Kalman filter for integrated INS/GPS navigation, and the proposed adaptive Kalman filter with an attenuation factor can restrain the measurement noise and process noise. Chen et al. [
18] proposed a novel model combined with strong tracking Kalman filter and wavelet neural network algorithms for INS error compensation.
As mentioned above, the Kalman filter is widely used in different fields. However, not much research has been performed into navigation for sprinkler irrigation machines (SIMs). Besides this, Kalman filtering results usually are not optimal due to the uncertainty of the noise characteristics in the practical system [
19]. The system and observation noise characteristics can reduce the estimation accuracy, and result in the reduction of the reliability and real-time performance of the filter. In order to solve these problems, the Sage–Husa adaptive filter is updated on the basis of covariance matching technology with the aim of applying it in the navigation of a translational sprinkler irrigation machine.
The rest of this paper is organized as follows. In
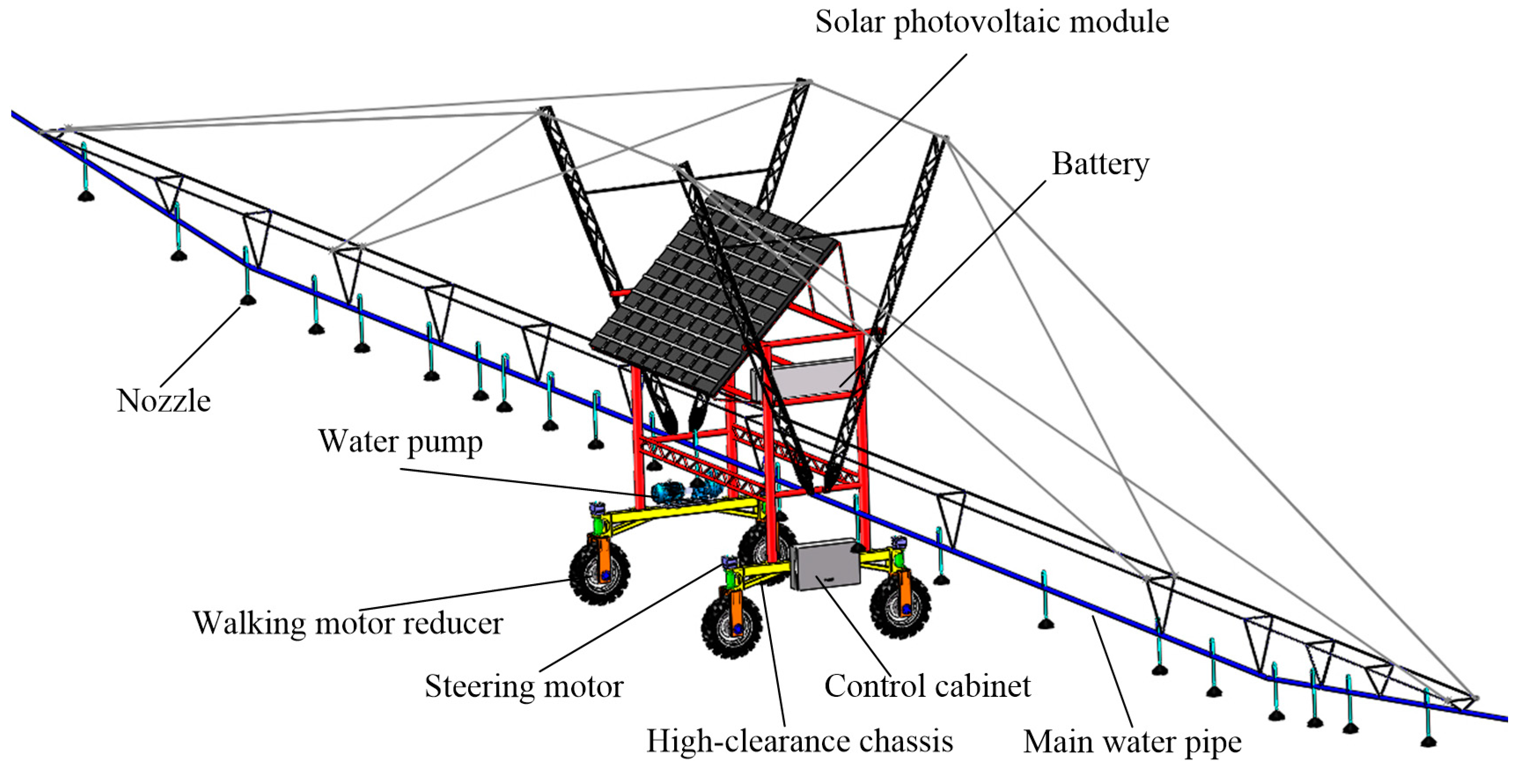
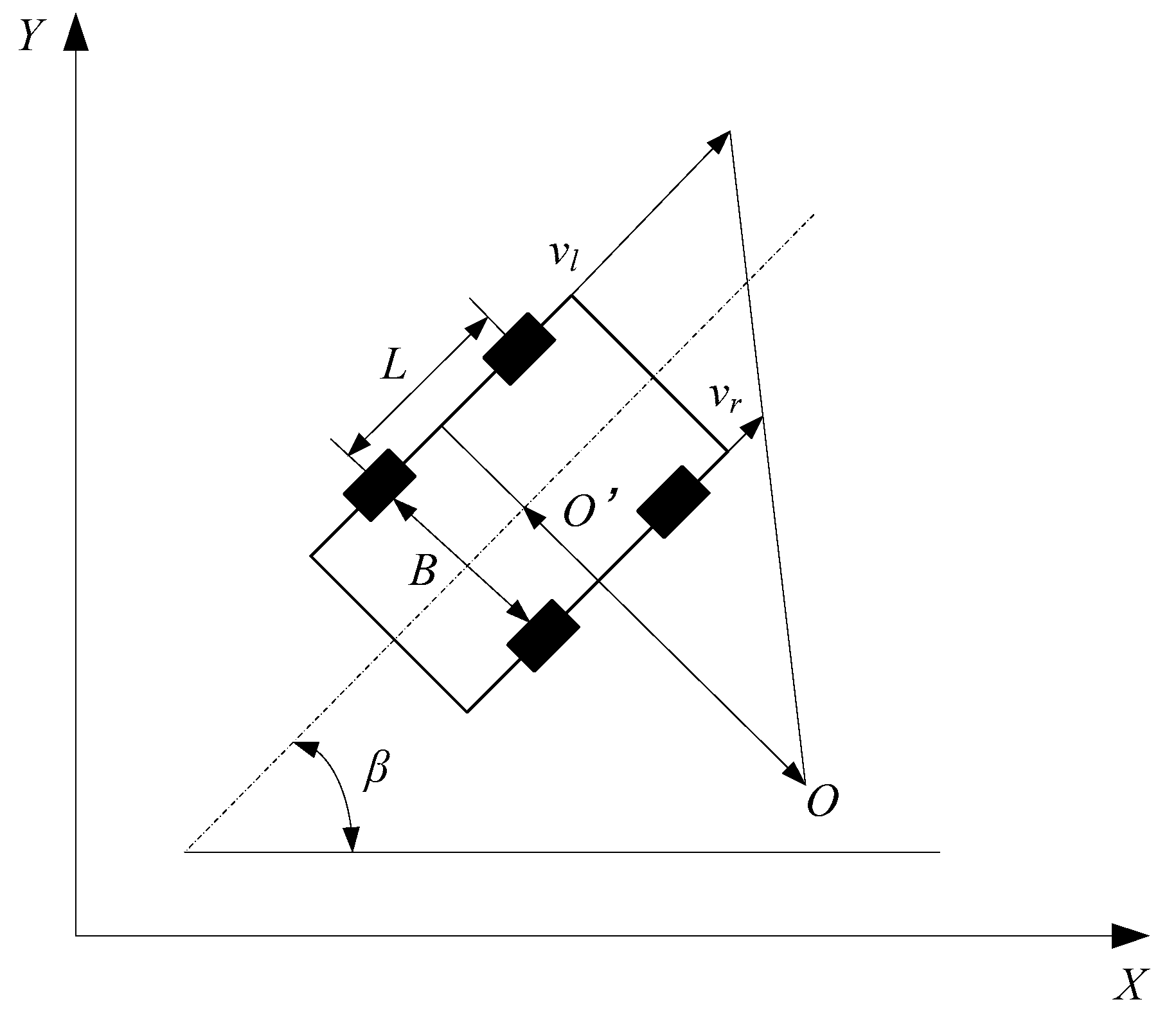
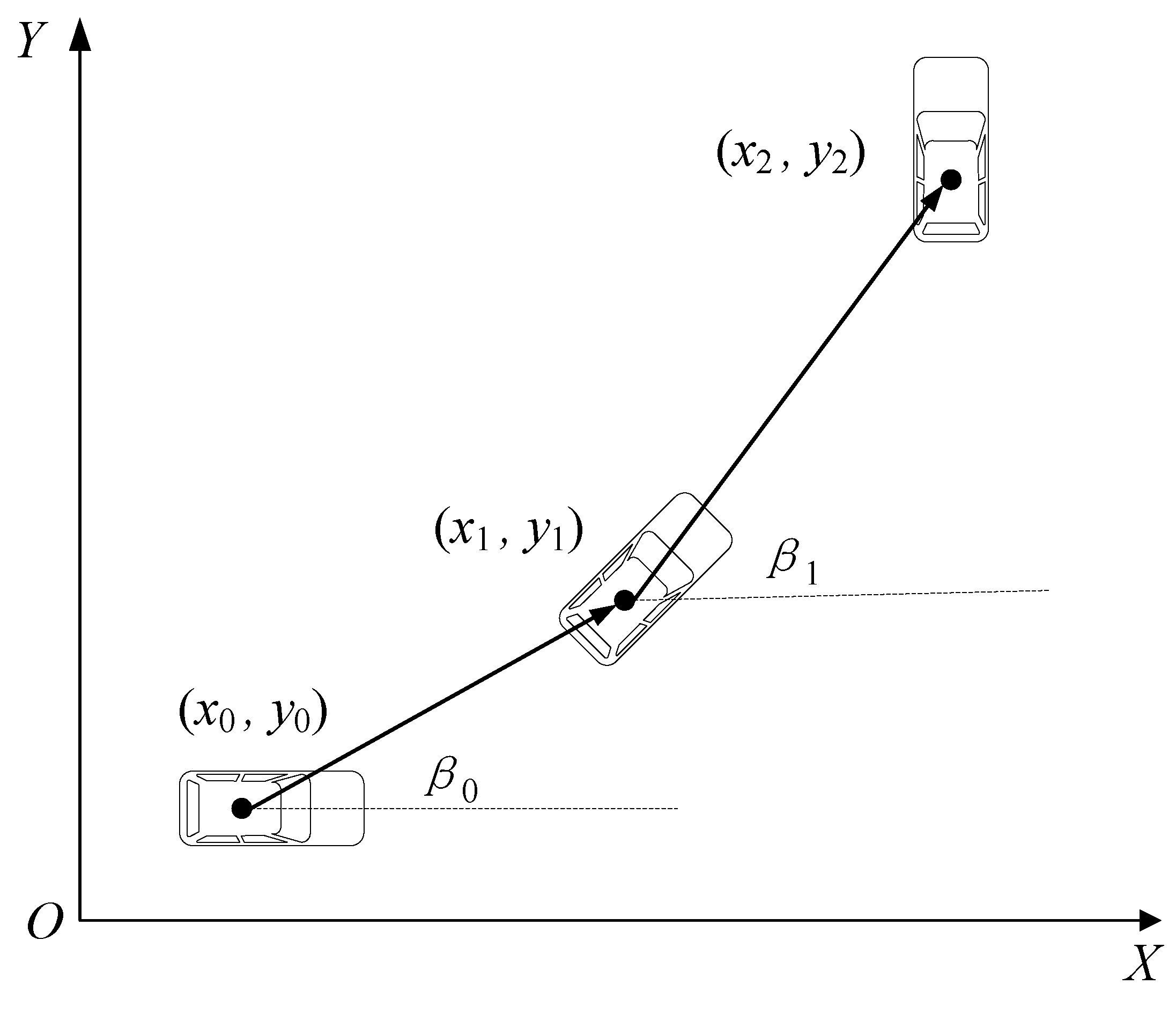
Section 2, the self-developed SIM is introduced, and the kinematic model for the SIM is established. In
Section 3, the updated Sage–Husa adaptive Kalman filter is derived and presented. In
Section 4, the design of the Kalman filter for the SIM is presented. In
Section 5, the application of the updated Sage–Husa adaptive Kalman filter in the navigation of the self-developed SIM is illustrated. Conclusions are drawn in
Section 6.
3. Updated Kalman Filter Algorithm
3.1. Conventional Kalman Filter
In extensive engineering applications, the actual value of the state variables of a system usually cannot be obtained directly; they can be extracted from observations which have random noise. The Kalman filter is an effective method to obtain the actual value of the system state variables by analyzing the observations of the system. Generally, the Kalman filter is a linear minimum-variance filter, which can be used to estimate and correct the system state by using an iterative algorithm.
As for a general linear system, the state equation after discretization can be expressed as follow [
20]:
where
and
are the state vector at time
k and time
k − 1, respectively,
is the one-step state transition matrix from time
k − 1 to time
k, and the system noise
is the Gaussian white noise with an average value of zero. The expectation values of system noise can be expressed as
where
is the Dirac delta function.
where
is the process noise covariance matrix.
The observation equation of the system can be written as
where
is the observation at time
k,
H is the observation matrix,
is the state vector at time
k, and the observation noise
is the Gaussian white noise with zero mean.
The expectation values of observation noise can also be expressed as
where
is the Dirac delta function, and
R is the observation noise covariance.
In the Kalman filter algorithm, if the state estimation and covariance matrix at the initial time X(0) and P(0)—namely X0 and P0—are given, the state estimation and its covariance matrix at time k—i.e., X(k) and P(k), namely and , (k = 1,2, …)—can be obtained recursively according to the observation Z(k), namely , at time k. The implementation steps of the Kalman filter are given below:
(1) Estimate the process state:
(2) Calculate the covariance matrix of state estimation:
(3) Compute the Kalman gain:
(4) Update the state estimation with observation:
(5) Update the error covariance:
3.2. Sage–Husa Adaptive Kalman Filter
The Sage–Husa adaptive filter is one of variants of the conventional Kalman filter; that is, the Sage–Husa adaptive filter algorithm is proposed based on the conventional Kalman filter algorithm. The calculation flow for the Sage–Husa adaptive filter algorithm can be described as follows [
21]:
where
is the amnestic factor and
b is the forgetting factor in the range of 0 and 1,
is the covariance matrix of state estimation,
is the one-step estimation variance matrix,
is the filter gain,
is the remainder vector, and
is the observation noise covariance.
According to Equations (17)–(23), it is demonstrated that the variance matrix of the observation noise should be calculated in the filtering process for every parameter k through the Sage–Husa adaptive filter algorithm, which leads to increasing filtering complexity and an extra amount of computation. Therefore, it is difficult to guarantee the real-time performance of the Sage–Husa adaptive filter algorithm in practical application. In order to apply the Sage–Husa adaptive filter to a practical situation, its real-time performance should be updated.
3.3. Updated Sage–Husa Adaptive Kalman Filter
The Sage–Husa adaptive Kalman filter and conventional Kalman filter both have advantages and disadvantages. The Sage–Husa adaptive Kalman filter has higher estimation accuracy; however, it has increased filter complexity, caused by large amount of computation. On the other hand, the conventional Kalman filter has higher computational efficiency, but its estimation accuracy is low. On the basis of the covariance matching method, the Sage–Husa adaptive Kalman filter algorithm can be updated in order to reduce the amount of computation and improve the real-time performance of the algorithm.
The basic idea of the covariance matching method is as follows. The actual remainder vector
is verified while filtering in order to determine whether it is compatible; that is,
is verified in order to determine whether abnormal filtering occurs. When the actual remainder is incompatible under the null hypothesis
Q(
k − 1) and
R(
k − 1)—i.e.,
and
—then
Q(
k) and
R(
k)—i.e.,
and
—are estimated to replace the original assumptions
and
[
22].
The criterion for judging filter anomaly is
where
γ is the reserve coefficient,
γ ≥ 1;
tr represents the trace of the matrix, and
is the remainder vector.
If Equation (25) is true, this indicates that the actual error will exceed the theoretical prediction value by γ times, and the filter is divergent. When γ is equal to 1, this is the strictest convergence criterion.
Assuming that
, Equation (26) can be given theoretically as follows:
Therefore, the criterion for judging filter anomaly can be rewritten as follows:
In the filtering process, Equation (27) can be used to judge the filtering state. If Equation (27) is true, which means the filtering process is abnormal, then
should be estimated in order to adapt it to the current filtering; otherwise, Equation (27) is not true, which means the filtering process is normal, and
does not need to be estimated [
23]. That is, in the
k-th filtering process, the remainder term
is used to verify
. If Equation (27) is true, which means that the actual remainder is incompatible with the null hypothesis
, then
can be calculated by Equation (23) to replace
; otherwise, if Equation (27) is not true, the calculation of Equation (23) is not required, and
is equal to
. Thus, the amount of computation can be reduced, and the self-adaptive estimation of
can be realized.
5. Application in the Navigation of the Self-Developed SIM
In practice, the established mathematical model has difficulty reflecting the real physical process. When the mathematical model does not match the observations, the application of the Kalman filtering algorithm can lead to filter divergence. In the updated Sage–Husa adaptive Kalman filter algorithm, the self-adaptive filtering process can be realized by correcting the covariance matrix of the observation noise of the system. Therefore, the updated Sage–Husa adaptive Kalman filter algorithm has the advantages of more flexibility and reliability, and it can be used to reduce estimation error.
In this study, the self-developed translational SIM is taken as the experimental platform. The navigation control system of the self-developed SIM is composed of a navigation controller, GPS receiver, electronic compass, speed sensor, speed controller and so on. The navigation controller is used to implement the navigation control algorithms, generate and output the control commands; the GPS receiver is employed to obtain the position information (values of X-coordinate and Y-coordinate); the electronic compass is used to measure the angular components in the planar coordinates of the Gauss projection; and the speed sensor is used to obtained the longitudinal moving speed of the SIM.
The self-developed SIM is a kind of continuous straight-line moving machine. Therefore, the experimental verification is conducted by taking linear motion as an example. In this part, the updated Sage–Husa adaptive Kalman filter algorithm is applied in the navigation.
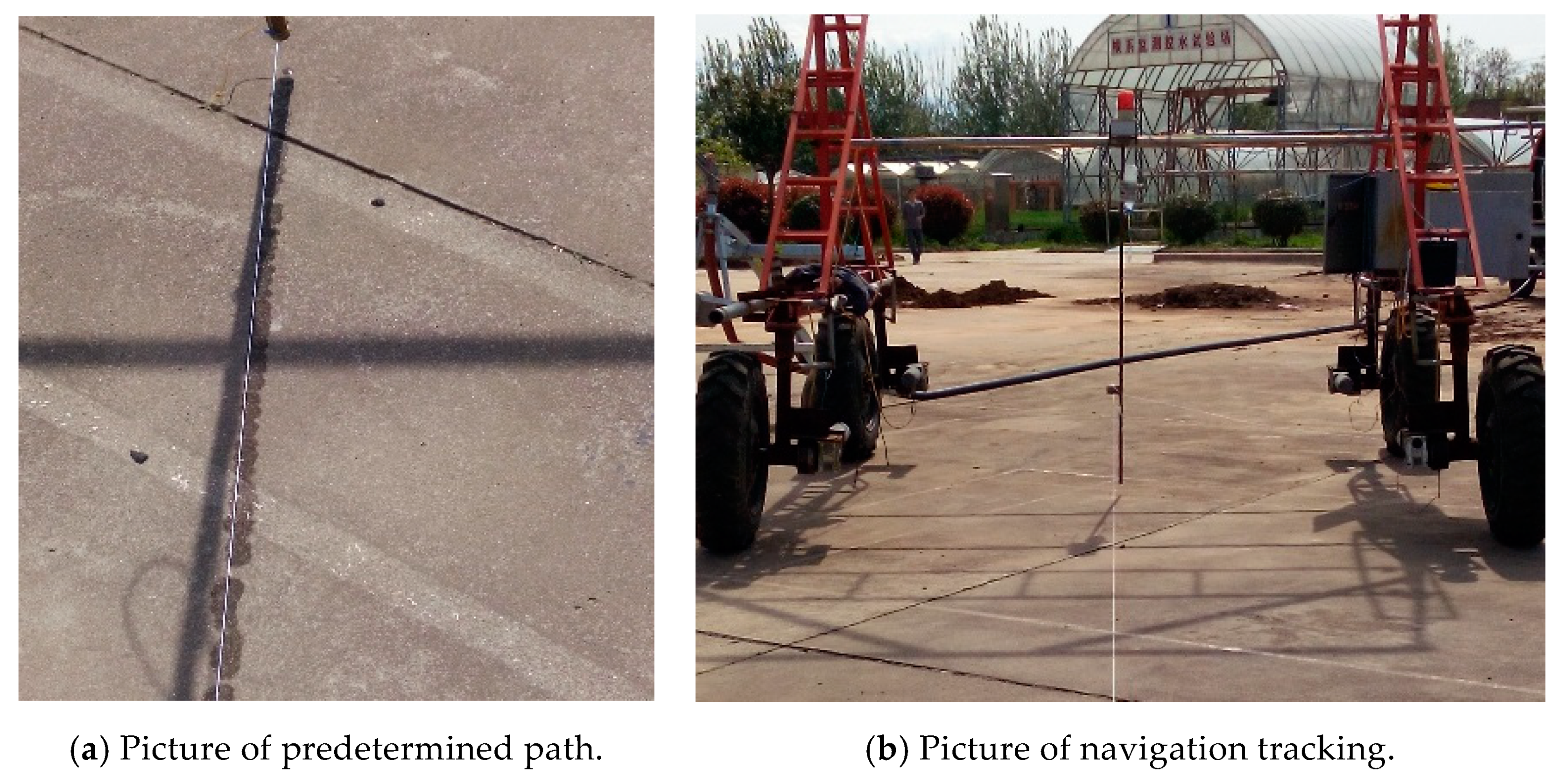
In order to verify the navigation performance of the self-developed SIM and test the positioning accuracy of the SIM by using the updated Sage–Husa adaptive Kalman filter algorithm in navigation, the navigation tracking experiment is conducted. The experimental scenario is shown in
Figure 5.
In the experiment, the SIM tracks along the predetermined path. A straight path is planned on the cement road for the verification experiment: the initial coordinates of the path are (3800970.522, 782548.0014), and the destination coordinates of the path are (3800967.693, 782516.8791). In order to facilitate the analysis and calculation, the relative coordinates, which are the difference between the collected coordinate data and initial coordinates, are used.
The initial value of the process noise covariance matrix Q can be written as
; the initial matrix for the observation noise covariance matrix R can be written as
. Besides this, the initial matrix for the covariance matrix of state estimation P can be written as
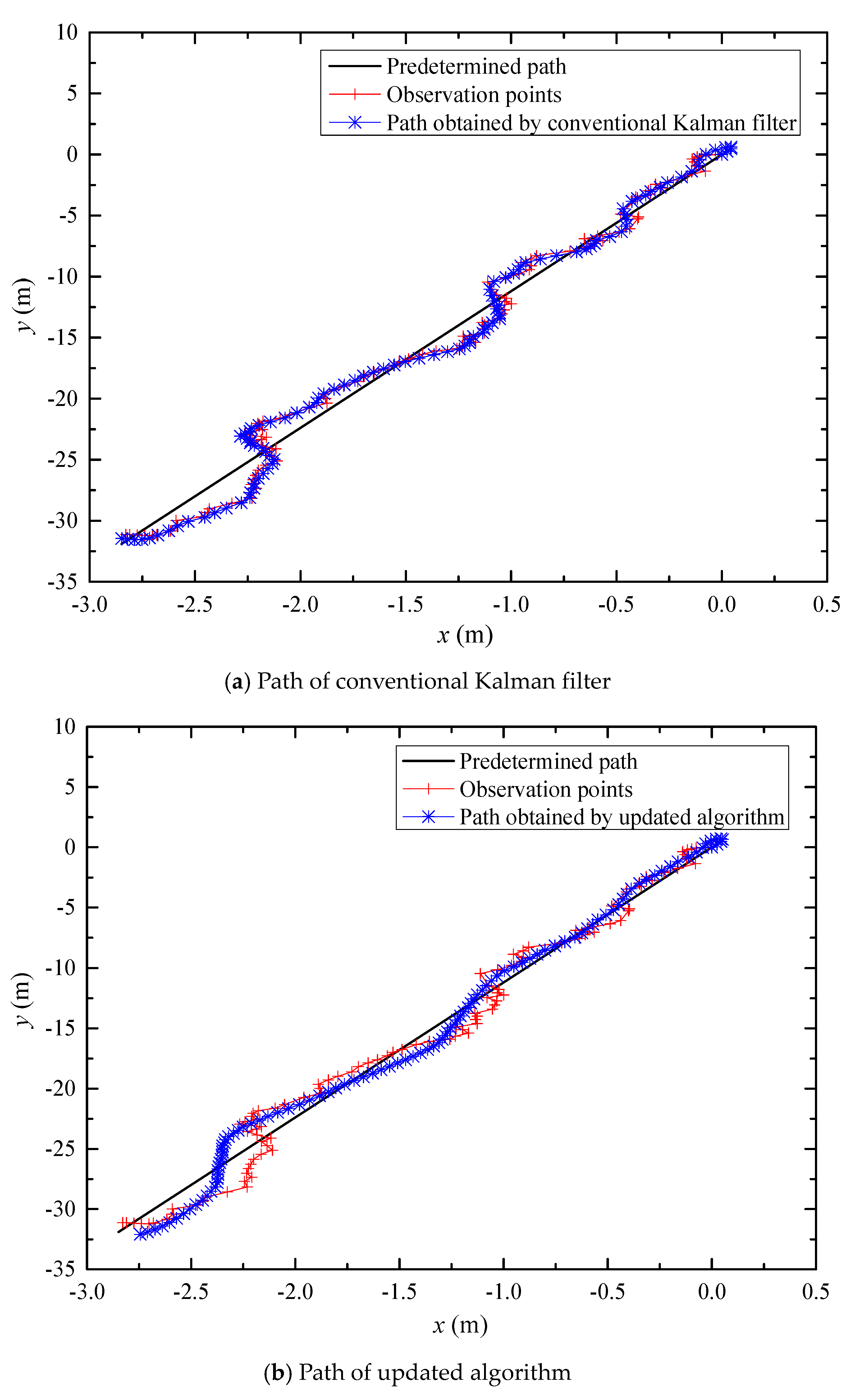
. The filtering results for the navigation of the SIM are shown in
Figure 6.
It is seen from
Figure 6 that the tracking path of the updated Sage–Husa adaptive Kalman filter and conventional Kalman filter are close. This is because, during most of the path tracking time, the filtering process of the updated Sage–Husa adaptive Kalman filter is normal—that is,
is adaptive to the current filtering—thus,
does not need to be estimated. Therefore, there are no great differences between the filtering results of the updated Sage–Husa adaptive Kalman filter and conventional Kalman filter.
From
Figure 6a, it can be seen that when the observations have large deviations, the data obtained by the conventional Kalman filter also have large deviations. It is seen in
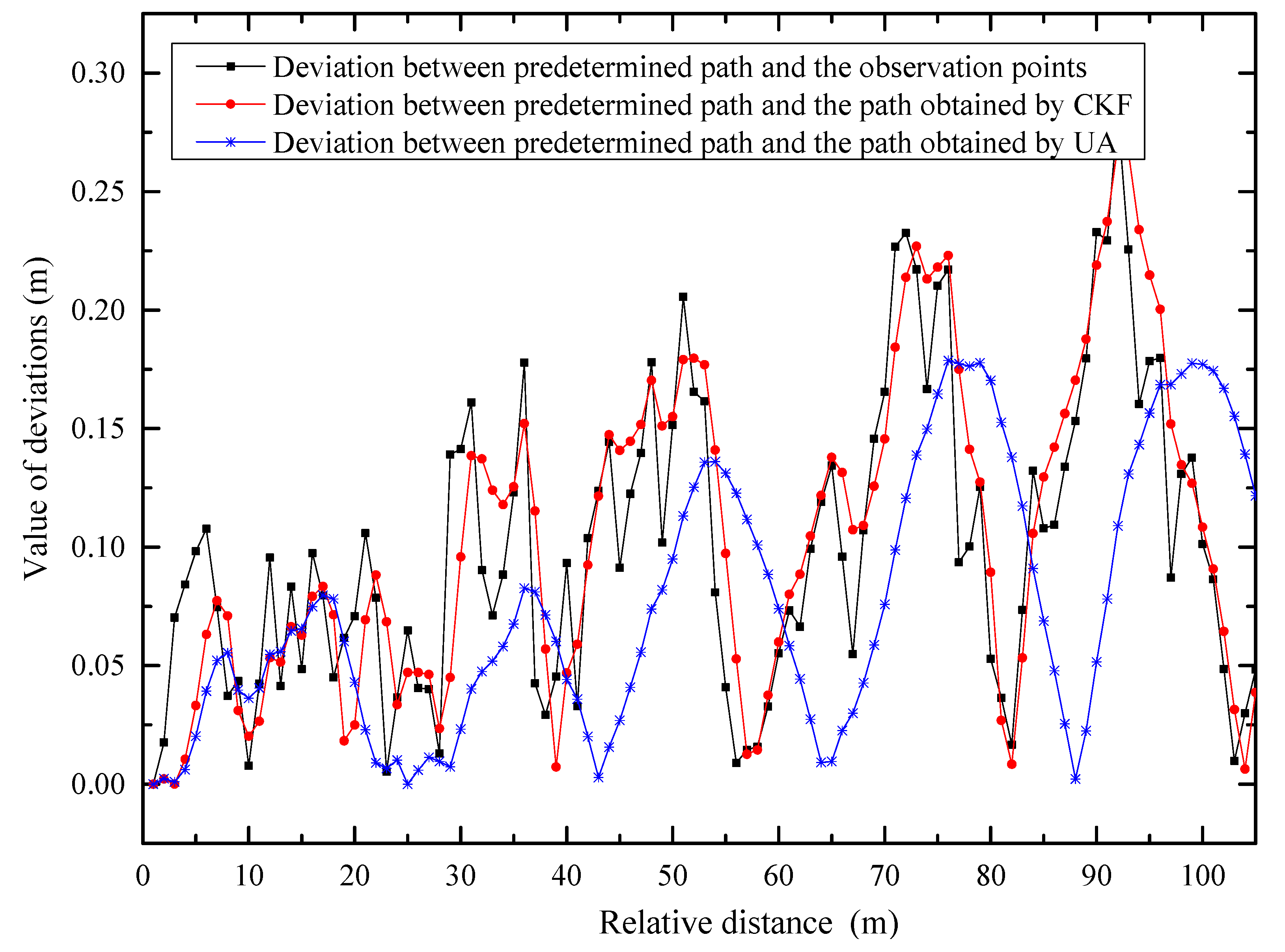
Figure 6b that the data obtained by the updated Sage–Husa adaptive Kalman filter also have deviations; however, the deviations are smaller than that of the conventional Kalman filter. For a more intuitive comparison, the deviations between the predetermined path and the observation points, the path obtained by using the conventional Kalman filter (CKF) and the path obtained by using the updated algorithm (UA) are depicted in
Figure 7.
It is indicated in
Figure 7 that the filtering precision of the updated Sage–Husa adaptive Kalman filter is higher than that of conventional Kalman filter. This is because when the filtering process is abnormal,
is not adaptive to the current filtering. Thus,
is estimated by using Equation (23) in order to adapt it to the current filtering process. The influence of abnormal observations on the positioning accuracy of the system can be restrained by the updated Sage–Husa adaptive Kalman filter. Accordingly, the accuracy and stability of the filter can be improved effectively.
To sum up, the self-developed SIM has good navigation performance, and the updated Sage–Husa adaptive Kalman filter can be applied in the navigation of the SIM. The average deviation, maximum deviation and deviation variance of position for the SIM, which are obtained before and after the filtering process through the updated Sage–Husa adaptive Kalman filter, are shown in
Table 2.
It is indicated in
Table 2 that the average deviation, maximum deviation and deviation variance become smaller after filtering through the updated Sage–Husa adaptive Kalman filter, which means the positioning accuracy of the system is improved. After using the updated Sage–Husa adaptive Kalman filter, the maximum deviation between the SIM and the predetermined path is 0.18 m, and the average deviation is 0.08 m; these deviations are within a reasonable range. This proves that the updated Sage–Husa adaptive Kalman filter is applicable for the navigation of sprinkler irrigation machines.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}