A Data-Driven Surrogate Approach for the Temporal Stability Forecasting of Vegetation Covered Dikes



Abstract
:1. Introduction
2. Method
2.1. Integrated Crop-Geotechnical Model
2.2. Machine Learning Method
2.2.1. Random Forest Algorithm
2.2.2. Building and Training the RF Model
- A section of training data (with replacement) is selected. This is made up of a number of samples (the full set of observable features associated with each time point).
- For each selection, a regression tree is constructed, constrained by the user-defined hyper-parameters. At each node, a threshold is determined for a single (randomly selected) feature. The data are then partitioned until a best estimate of the output is calculated.
- The target value from every decision tree is predicted.
- Voting of predicted results is conducted to achieve the terminal predicted results. In a regression RF, voting means using the mean value of results.
2.2.3. Feature Importance
2.3. Case Study
2.3.1. Numerical Model
2.3.2. RF Model
- Real-time assessment (RF): the dike safety (FoS) is assessed in real time based on the observable data. The features are selected from the same day on which the FoS is estimated by the RF model.
- Short-term prediction (RF): the dike safety is calculated for some days in the future. This time lag gives dike managers enough time to take necessary actions before the occurrence of potential catastrophic events. All features except rainfall and temperature are for some days prior to the day that FoS is estimated. Rainfall and temperature correspond to the day on which FoS is calculated by the RF model.
RF Model Hyper-Parameters Tuning
3. Results and Discussion
3.1. Integrated Crop-Geotechnical Model Simulations
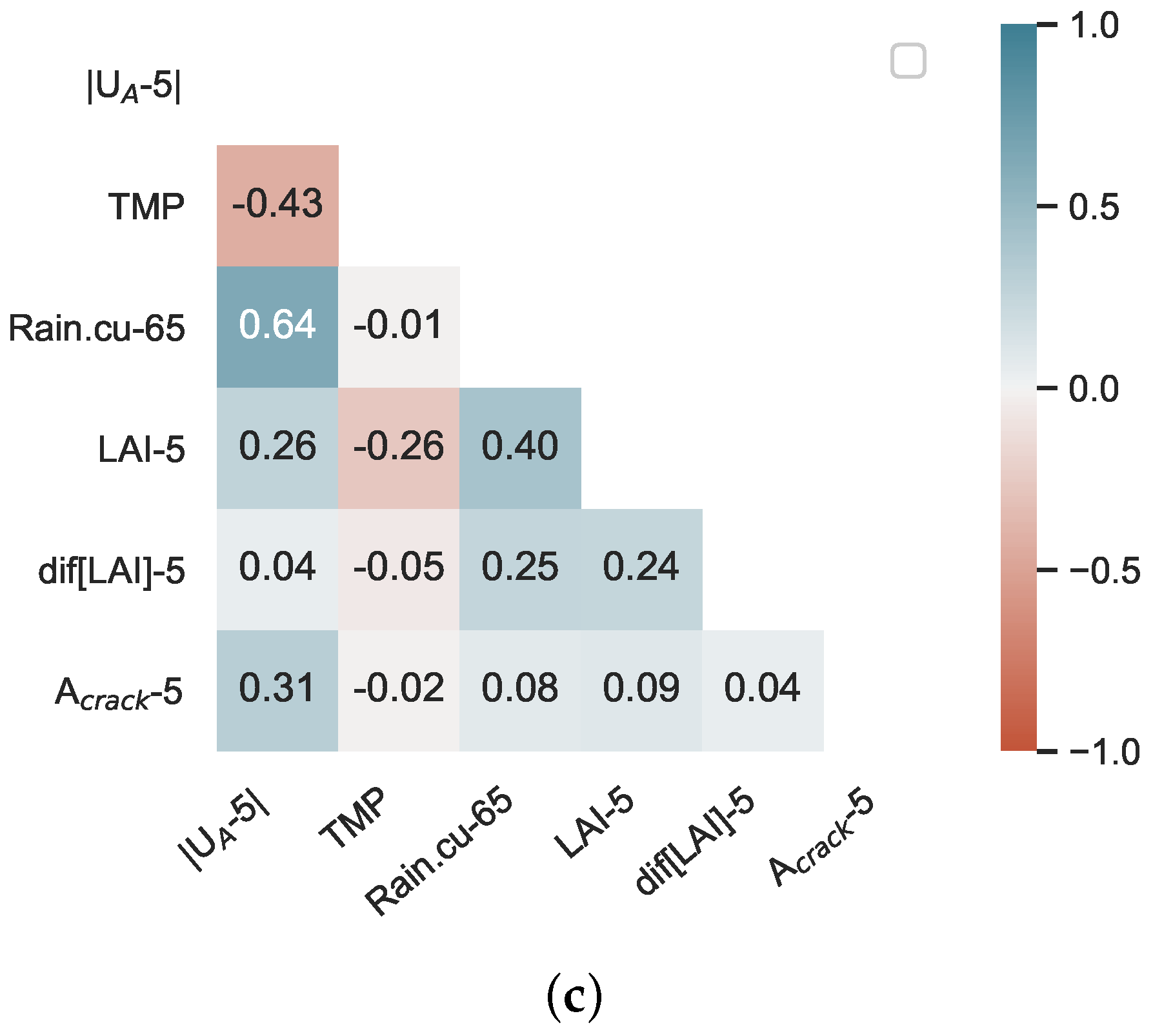
3.2. Correlation between Potential Features and the Factor of Safety
3.3. RF Regression
3.3.1. Feature Selection
3.3.2. Real-Time Assessment
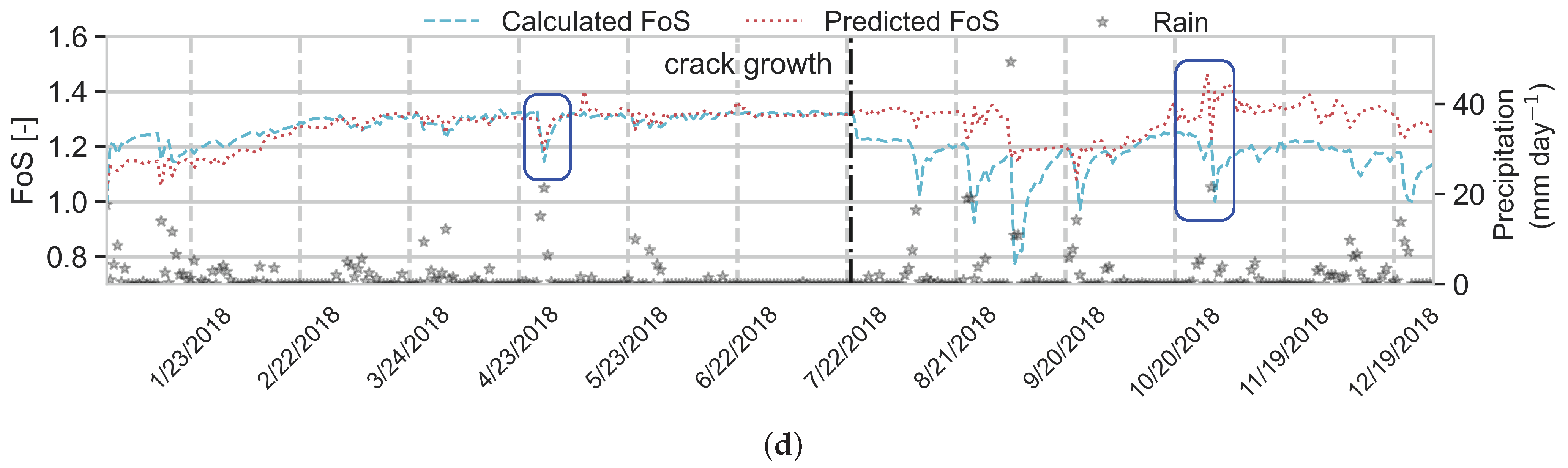
3.3.3. Short Term Prediction
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- CIRIA; Ecology, F.M.; USACE. The International Levee Handbook; CIRIA: London, UK, 2013. [Google Scholar]
- De Vries, G. Monitoring Droogteonderzoek Veenkaden; Technical Report; Deltares: Delft, The Netherlands, 2012. [Google Scholar]
- Cundill, S.L. Investigation of Remote Sensing for Dike Inspection. Ph.D. Thesis, University of Twente, Twente, The Netherlands, 2014. [Google Scholar]
- Ozer, I. Understanding Levee Failures from Historical and Satellite Observations. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Van Baars, S. The horizontal failure mechanism of the Wilnis peat dyke. Géotechnique 2005, 55, 319–323. [Google Scholar] [CrossRef]
- Pourghasemi, H.R.; Rahmati, O. Prediction of the landslide susceptibility: Which algorithm, which precision? Catena 2018, 162, 177–192. [Google Scholar] [CrossRef]
- Ada, M.; San, B.T. Comparison of machine-learning techniques for landslide susceptibility mapping using two-level random sampling (2LRS) in Alakir catchment area, Antalya, Turkey. Nat. Hazards 2018, 90, 237–263. [Google Scholar] [CrossRef]
- Baum, R.L.; Godt, J.W.; Savage, W.Z. Estimating the timing and location of shallow rainfall-induced landslides using a model for transient, unsaturated infiltration. J. Geophys. Res. Earth Surf. 2010, 115. [Google Scholar] [CrossRef]
- Conte, E.; Troncone, A. Analytical method for predicting the mobility of slow-moving landslides owing to groundwater fluctuations. J. Geotech. Geoenviron. Eng. 2011, 137, 777–784. [Google Scholar] [CrossRef]
- Conte, E.; Troncone, A. Stability analysis of infinite clayey slopes subjected to pore pressure changes. Géotechnique 2012, 62, 87–91. [Google Scholar] [CrossRef]
- Conte, E.; Donato, A.; Pugliese, L.; Troncone, A. Analysis of the Maierato landslide (Calabria, Southern Italy). Landslides 2018, 15, 1935–1950. [Google Scholar] [CrossRef]
- Yilmaz, I. Comparison of landslide susceptibility mapping methodologies for Koyulhisar, Turkey: Conditional probability, logistic regression, artificial neural networks, and support vector machine. Environ. Earth Sci. 2010, 61, 821–836. [Google Scholar] [CrossRef]
- Mokarram, M.; Zarei, A.R. Landslide Susceptibility Mapping Using Fuzzy-AHP. Geotech. Geol. Eng. 2018, 36, 3931–3943. [Google Scholar] [CrossRef]
- Raja, N.B.; Çiçek, I.; Türkoğlu, N.; Aydin, O.; Kawasaki, A. Landslide susceptibility mapping of the Sera River Basin using logistic regression model. Nat. Hazards 2017, 85, 1323–1346. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Pourghasemi, H.R.; Kornejady, A.; Zhang, N. Landslide spatial modeling: Introducing new ensembles of ANN, MaxEnt, and SVM machine learning techniques. Geoderma 2017, 305, 314–327. [Google Scholar] [CrossRef]
- Youssef, A.M.; Pourghasemi, H.R.; Pourtaghi, Z.S.; Al-Katheeri, M.M. Landslide susceptibility mapping using random forest, boosted regression tree, classification and regression tree, and general linear models and comparison of their performance at Wadi Tayyah Basin, Asir Region, Saudi Arabia. Landslides 2016, 13, 839–856. [Google Scholar] [CrossRef]
- Steger, S.; Brenning, A.; Bell, R.; Petschko, H.; Glade, T. Exploring discrepancies between quantitative validation results and the geomorphic plausibility of statistical landslide susceptibility maps. Geomorphology 2016, 262, 8–23. [Google Scholar] [CrossRef]
- Reichenbach, P.; Rossi, M.; Malamud, B.D.; Mihir, M.; Guzzetti, F. A review of statistically-based landslide susceptibility models. Earth-Sci. Rev. 2018, 180, 60–91. [Google Scholar] [CrossRef]
- Pradhan, B. A comparative study on the predictive ability of the decision tree, support vector machine and neuro-fuzzy models in landslide susceptibility mapping using GIS. Comput. Geosci. 2013, 51, 350–365. [Google Scholar] [CrossRef]
- Pourghasemi, H.R.; Yansari, Z.T.; Panagos, P.; Pradhan, B. Analysis and evaluation of landslide susceptibility: A review on articles published during 2005–2016 (periods of 2005–2012 and 2013–2016). Arab. J. Geosci. 2018, 11, 193. [Google Scholar] [CrossRef]
- Goetz, J.; Brenning, A.; Petschko, H.; Leopold, P. Evaluating machine learning and statistical prediction techniques for landslide susceptibility modeling. Comput. Geosci. 2015, 81, 1–11. [Google Scholar] [CrossRef]
- Rossi, M.; Kirschbaum, D.; Luciani, S.; Mondini, A.C.; Guzzetti, F. TRMM satellite rainfall estimates for landslide early warning in Italy: Preliminary results. In Proceedings of the Remote Sensing of the Atmosphere, Clouds, and Precipitation IV, International Society for Optics and Photonics, Kyoto, Japan, 29–31 October 2012; Volume 8523, p. 85230D. [Google Scholar] [CrossRef]
- Kirschbaum, D.B.; Stanley, T.; Simmons, J. A dynamic landslide hazard assessment system for Central America and Hispaniola. Nat. Hazards Earth Syst. Sci. 2015, 15. [Google Scholar] [CrossRef] [Green Version]
- Hartke, S. Accounting for Satellite Precipitation Uncertainty: The Development of a Probabilistic Landslide Hazard Nowcasting System. Master’s Thesis, University of Wisconsin-Madison, Madison, WI, USA, 2019. [Google Scholar]
- Kirschbaum, D.; Stanley, T. Satellite-based assessment of rainfall-triggered landslide hazard for situational awareness. Earth’s Future 2018, 6, 505–523. [Google Scholar] [CrossRef]
- Jia, G.; Tang, Q.; Xu, X. Evaluating the performances of satellite-based rainfall data for global rainfall-induced landslide warnings. Landslides 2020, 17, 283–299. [Google Scholar] [CrossRef]
- Segoni, S.; Lagomarsino, D.; Fanti, R.; Moretti, S.; Casagli, N. Integration of rainfall thresholds and susceptibility maps in the Emilia Romagna (Italy) regional-scale landslide warning system. Landslides 2015, 12, 773–785. [Google Scholar] [CrossRef] [Green Version]
- Tien Bui, D.; Tuan, T.A.; Klempe, H.; Pradhan, B.; Revhaug, I. Spatial prediction models for shallow landslide hazards: A comparative assessment of the efficacy of support vector machines, artificial neural networks, kernel logistic regression, and logistic model tree. Landslides 2016, 13, 361–378. [Google Scholar] [CrossRef]
- Wei, X.; Zhang, L.; Yang, H.Q.; Zhang, L.; Yao, Y.P. Machine learning for pore-water pressure time-series prediction: Application of recurrent neural networks. Geosci. Front. 2020. [Google Scholar] [CrossRef]
- Chakraborty, A.; Goswami, D.D. Slope Stability Prediction using Artificial Neural Network (ANN). Int. J. Eng. Comput. Sci. 2017, 6. [Google Scholar] [CrossRef]
- Pei, H.; Zhang, S.; Borana, L.; Zhao, Y.; Yin, J. Slope stability analysis based on real-time displacement measurements. Measurement 2019, 131, 686–693. [Google Scholar] [CrossRef]
- Qi, C.; Tang, X. Slope stability prediction using integrated metaheuristic and machine learning approaches: A comparative study. Comput. Ind. Eng. 2018, 118, 112–122. [Google Scholar] [CrossRef]
- Lin, Y.; Zhou, K.; Li, J. Prediction of slope stability using four supervised learning methods. IEEE Access 2018, 6, 31169–31179. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Hojat, A.; Arosio, D.; Ivanov, V.I.; Loke, M.H.; Longoni, L.; Papini, M.; Tresoldi, G.; Zanzi, L. Quantifying seasonal 3D effects for a permanent electrical resistivity tomography monitoring system along the embankment of an irrigation canal. Near Surf. Geophys. 2020, 18, 427–443. [Google Scholar] [CrossRef]
- Jamalinia, E.; Vardon, P.J.; Steele-Dunne, S.C. The effect of soil-vegetation-atmosphere interaction on slope stability: A numerical study. Environ. Geotech. 2019. Ahead of print. [Google Scholar] [CrossRef] [Green Version]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001; Volume 2. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remot. Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- ESA. User Guid, Sentinel-1. 2020. Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-1-sar (accessed on 18 December 2020).
- Carlà, T.; Intrieri, E.; Raspini, F.; Bardi, F.; Farina, P.; Ferretti, A.; Colombo, D.; Novali, F.; Casagli, N. Perspectives on the prediction of catastrophic slope failures from satellite InSAR. Sci. Rep. 2019, 9, 14137. [Google Scholar] [CrossRef] [Green Version]
- Jamalinia, E.; Vardon, P.J.; Steele-Dunne, S.C. The impact of evaporation induced cracks and precipitation on temporal slope stability. Comput. Geotech. 2020, 122, 103506. [Google Scholar] [CrossRef]
- Jamalinia, E.; Vardon, P.; Steele-Dunne, S. Use of displacement as a proxy for dike safety. Proc. IAHS 2020, 382, 481–485. [Google Scholar] [CrossRef] [Green Version]
- de Gast, T.; Hicks, M.A.; van den Eijnden, A.P.; Vardon, P.J. On the reliability assessment of a controlled dyke failure. Géotechnique 2020, 1–16. [Google Scholar] [CrossRef]
- Plaxis, B.V. Plaxis Reference Manual 2018; PLAXIS: Delft, Netherlands, 2018. [Google Scholar]
- Bouman, B.A.M.; Schapendonk, A.H.C.M.; Stol, W.; van Kraalingen, D.W.G. Description of LINGRA, a model approach to evaluate potential productivities of grasslands in different European climate regions. Quant. Approaches Syst. Anal. 1996, 7, 11–58. [Google Scholar]
- Jamalinia, E.; Tehrani, F.S.; Steele-Dunne, S.C.; Vardon, P.J. Predicting rainfall induced slope stability using Random Forest regression and synthetic data. Understanding and Reducing Landslide Disaster Risk. In Proceedings of the 5th World Landslide Forum, Kyoto, Japan, 2–6 November 2021; pp. 223–229. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.; Stone, C.J.; Olshen, R.A. Classification and Regression Trees; CRC Press: Boca Raton, FL, USA, 1984. [Google Scholar]
- Verikas, A.; Vaiciukynas, E.; Gelzinis, A.; Parker, J.; Olsson, M.C. Electromyographic patterns during golf swing: Activation sequence profiling and prediction of shot effectiveness. Sensors 2016, 16, 592. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Li, E.; Wei, H.; Li, C.; Qiao, Q.; Armaghani, D.J. Random forests and cubist algorithms for predicting shear strengths of rockfill materials. Appl. Sci. 2019, 9, 1621. [Google Scholar] [CrossRef] [Green Version]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Probst, P.; Wright, M.N.; Boulesteix, A.L. Hyperparameters and tuning strategies for random forest. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2019, 9, e1301. [Google Scholar] [CrossRef] [Green Version]
- Stone, M. Cross-validatory choice and assessment of statistical predictions. J. R. Stat. Soc. Ser. Methodol. 1974, 36, 111–133. [Google Scholar] [CrossRef]
- Schapendonk, A.H.C.M.; Stol, W.; van Kraalingen, D.W.G.; Bouman, B.A.M. LINGRA, a sink/source model to simulate grassland productivity in Europe. Eur. J. Agron. 1998, 9, 87–100. [Google Scholar] [CrossRef]
- Wolf, J. Grassland Data from PASK Study & Testing of LINGRA; Technical Report, ASEMARS; Alterra: Denver, CO, USA, 2006. [Google Scholar]
- Entekhabi, D.; Yueh, S.; O’Neill, P.E.; Kellogg, K.H.; Allen, A.; Bindlish, R.; Brown, M.; Chan, S.; Colliander, A.; Crow, W.T.; et al. SMAP Handbook. Soil Moisture Active Passive: Mapping Soil Moisture and Freeze/Thaw from Space; JPL Publication: Pasadena, CA, USA, 2014. [Google Scholar]
- Li, J.; Zhang, L. Geometric parameters and REV of a crack network in soil. Comput. Geotech. 2010, 37, 466–475. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Component | Parameters | Value | ||
|---|---|---|---|---|
| Crop sub-model | Soil | 0.29 (cmwater cmsoil) | ||
| 0.12 (cmwater cmsoil) | ||||
| 0.005 (cmwater cmsoil) | ||||
| 50 (mm day) | ||||
| Vegetation | 0.025 (m g) | |||
| 0.8 (m leaf mground) | ||||
| 4 (m leaf m ground) | ||||
| Root zone | Dike body | |||
| Geotechnical sub-model | Constitutive model | Saturated unit weight () | 20 (kN m) | 12 (kN m) |
| Intact friction angle () | 23 | 23 | ||
| Minimum friction angle () | 4.5 | - | ||
| Intact cohesion () | 2 (kPa) | 2 (kPa) | ||
| Minimum cohesion () | 0.6 (kPa) | - | ||
| Dilatancy angle () | 0 | 0 | ||
| Young’s modulus (E) | 10 (MPa) | 20 (MPa) | ||
| Poisson’s ratio () | 0.3 | 0.2 | ||
| Initial void ratio () | 0.67 | 1.2 | ||
| Hydraulic model | Permeability () | 0.14 (m day) | 0.03 (m day) | |
| Scale parameter | 1.47 (m) | 1.38 (m) | ||
| Fitting parameter n | 1.97 | 1.32 | ||
| Fitting parameter m | 0.87 | −1.24 | ||
| Parameter | Tested Value |
|---|---|
| n-estimator | [10, 50, 100, 200, 300, 500, 700, 1000, 1500, 2000] |
| max tree-depth | [10, 30, 50, 70, 100, 150, 200] |
| min-samples-split | [2, 3, 4, 5, 8, 10] |
| min-samples-leaf | [1, 2, 3, 4, 5] |
| RF Model | n-Estimator | Max Tree-Depth | Min-Samples-Split | Min-Samples-Leaf |
|---|---|---|---|---|
| RF | 700 | 200 | 2 | 1 |
| RF | 700 | 70 | 2 | 1 |
| RF | 2000 | 200 | 2 | 1 |
| RF | 700 | 30 | 2 | 1 |
| RF | 1500 | 30 | 2 | 1 |
| RF | 1000 | 100 | 2 | 1 |
| RF Model | |||||||
|---|---|---|---|---|---|---|---|
| RF | - | 0.42 | 0.22 | 0.17 | 0.1 | 0.07 | - |
| RF | - | 0.40 | 0.21 | 0.16 | 0.09 | 0.06 | 0.06 |
| RF | 0.47 | 0.25 | 0.11 | 0.07 | 0.04 | 0.03 | - |
| Features | -15/5d | -15/5d | -65 | -15/5d | -15/5d | |
|---|---|---|---|---|---|---|
| RF | - | 0.32 | 0.23 | 0.22 | 0.10 | 0.08 |
| RF | 0.48 | 0.17 | 0.13 | 0.11 | 0.05 | 0.05 |
| RF | - | 0.36 | 0.23 | 0.19 | 0.12 | 0.08 |
| Scenarios | Training | Testing | Evaluation | ||||
|---|---|---|---|---|---|---|---|
| R | RMSE | R | RMSE | R | RMSE | ||
| Real-time assessment | observable features (5 features) | 0.99 | 0.01 | 0.96 | 0.05 | 0.31 | 0.1 |
| observable features(6 features) | 0.99 | 0.01 | 0.98 | 0.05 | 0.32 | 0.1 | |
| observable and crack area as features | 1 | 0.01 | 0.98 | 0.03 | 0.56 | 0.07 | |
| Short-term prediction | observable features (15 days lag) | 0.99 | 0.01 | 0.94 | 0.06 | 0.06 | 0.14 |
| observable and crack area as features (15 days lag) | 0.99 | 0.01 | 0.98 | 0.04 | 0.44 | 0.08 | |
| observable features (5 days lag) | 0.99 | 0.01 | 0.96 | 0.05 | 0.24 | 0.12 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamalinia, E.; Tehrani, F.S.; Steele-Dunne, S.C.; Vardon, P.J. A Data-Driven Surrogate Approach for the Temporal Stability Forecasting of Vegetation Covered Dikes. Water 2021, 13, 107. https://doi.org/10.3390/w13010107
Jamalinia E, Tehrani FS, Steele-Dunne SC, Vardon PJ. A Data-Driven Surrogate Approach for the Temporal Stability Forecasting of Vegetation Covered Dikes. Water. 2021; 13(1):107. https://doi.org/10.3390/w13010107
Chicago/Turabian StyleJamalinia, Elahe, Faraz S. Tehrani, Susan C. Steele-Dunne, and Philip J. Vardon. 2021. "A Data-Driven Surrogate Approach for the Temporal Stability Forecasting of Vegetation Covered Dikes" Water 13, no. 1: 107. https://doi.org/10.3390/w13010107
APA StyleJamalinia, E., Tehrani, F. S., Steele-Dunne, S. C., & Vardon, P. J. (2021). A Data-Driven Surrogate Approach for the Temporal Stability Forecasting of Vegetation Covered Dikes. Water, 13(1), 107. https://doi.org/10.3390/w13010107