1. Introduction
Water distribution networks can be analysed through two main approaches: demand-driven or pressure-driven. The most significant part of hydraulic models, able to simulate the behaviour of water distribution networks (WDNs), is developed to account for customer demands as water withdrawal concentrated in nodes and assumes that these demands are known a priori in the model [
1]. In this way, the water volume supplied to the user is independent of nodal heads in demand-driven analysis. In fact, in demand-driven simulation methods, the available discharge in demand nodes is always equal to the required discharge, and the network is assumed to be able to provide the required demand under any circumstances due to the assumed independence between flow and pressure in the node.
Nevertheless, it is known that the discharge outflow is proportional to head in the WDN, and demand-driven analysis is unable to fully account for the relationship between nodal outflows and pressure variations, leading to unrealistic solutions for the hydraulic analysis of WDNs, and the simulation model has to incorporate a nodal outflow discharge model (head-driven analysis) [
1].
Over the past three decades, various relationships have been proposed to link the available discharge to the nodal pressure. These relationships are divided into two categories: discontinuous and continuous. Bhave [
2] was one of the first to apply this concept and defined the minimum required nodal head value for normal working conditions, suggesting a relationship that falls in the discontinuous category. His relationship admits that full demand is available for heads with a higher than minimum required value, while no discharge is supplied below the minimum required head in each node.
On the other hand, continuous laws attempt to consider the link between pressure and outflow discharge for the entire variation domain continuously. Several authors (see, among others, [
3,
4,
5]) have proposed a number of pressure/discharge relations in an attempt to represent the relationship between flow and pressure at a model node.
These formulations can take into account the pressure distribution in the water network. Despite this, unfortunately, these formulations are valid when the WDN operates in continuous supply and the users are directly connected with the WDNs. In many situations, especially in Mediterranean countries, water utilities have to operate under water scarcity conditions and have to manage the water volume supplied to the users through a discontinuous service (see [
6,
7]). When users experience water resource rationing due to water shortages, a common strategy adapted by users is to install private tanks to meet their own needs when the network operates under pressure conditions. Recently, [
8,
9] proposed a new model that takes into account the interposition of local storages supplying water to customers, showing the importance of the pressure measurement to correctly estimate the flow rates.
In WDNs characterised by the presence of several private tanks, in which the classic head/discharge relationships cannot be employed, specific models need to be developed to correctly simulate the operation of the WDN while accounting for reservoirs located between the hydraulic network and the users [
10].
A mathematical model capable of reproducing the tank emptying/filling cycles has been developed by De Marchis et al. [
11], which combines a tank continuity equation with a float valve emitter law, given by -4.6cm0cm
where
are the discharge, and
h is variable water depth.
is the float valve emitter coefficient,
is the valve discharge area,
H is the hydraulic head over the distribution network,
is the height of the floating valve, and
g is the acceleration due to gravity. Both the float valve emitter coefficient and the discharge area are dependent on the floater position, that is, on the water level in the tank. This tank model, recently validated against experimental data, showed the role of the pressure in the supply estimation.
In order to further show the importance of the pressure estimation in WDNs, it can be observed how the water distribution systems are susceptible to water leaks. Leakages depend on the area and shape of the leaks, as well as on the pipe material, but they basically depend on pressure inside the pipe. Specifically, the higher the pressure, the larger the leak flow, and vice versa. Pressure management is, in fact, a common practice to reduce the leakage rate from the network and the rate of new failures which occur under high pressure conditions [
12]. In this framework, several studies have been performed to obtain a correct estimation of the pressure in WDNs (see, among others, [
13,
14,
15]).
Since the early 1980s, many researchers have realised that the nodal discharge cannot be considered constant and that it is necessary to apply a relationship between nodal head and nodal discharge.
Perhaps the most well-known mathematical formulation able to demonstrate the direct relation between flow rate and pressure is the classical Torricelli’s formula:
where
is the leak outflow;
is the non dimensional discharge coefficient;
is the orifice (leak) area; and
H is the total head in the tank. The product
was later defined as effective area
.
The proportionality of the leak discharge to the square root of the pressure head inside the pipe has been questioned by many authors (see, among others, [
16]). To interpret data coming from laboratory tests and field measurements, [
17] suggested the use of the power law equation:
used by the International Water Association Water Loss Task Force (IWA), which includes the Torricelli’s equation if
and
.
In any case, both formulations presented above clearly show the role of the water head H in outflow estimation.
In recent years, several efforts have been made to find an innovative as well as economic system that can continuously monitor pressure and flow in a water distribution network (see [
18,
19]). Specifically, the cited studies focused attention on the efficiency of a system based on an Arduino microcontroller, able to measure pressure and flow rate. The authors observed how the system could be considered efficient, easy to develop, easy to repair, cheap, and modular. Recently, [
18] proposed an easy schematic method to obtain efficient measurement data from a single node. The authors divided the pressure monitoring system into four different layers—data collection level, communication level, cloud database and analysis level, and virtualisation level—and observed how Arduino microcontroller technologies can be used to cover all the layers and give the water utilities a novel economic approach for WDN monitoring.
Following these previous pioneering studies, this work proposes a new system of pressure and discharge monitoring in WDNs based on Arduino technology. The proposed system can be considered a simple and innovative view to measure the hydraulic variables in a very simple way, characterised by low costs of implementation. Basically, the use of recent technologies through microcontrollers can be the solution to a number of problems including fast and reliable pressure measurements. In the proposed research, experiments were performed to calibrate and validate the proposed measurement station, through hydrostatic as well as hydrodynamic tests. The results confirmed the ability of the prototype to correctly measure the pressure in WDNs. The new monitoring system is composed of eight pressure transducers, one Arduino microcontroller, and one printed circuit board. The choice to use an Arduino microcontroller was mainly guided by considering its affordability and its low price; furthermore, it can be considered the standard open-source electronic prototyping platform, enabling users to create interactive electronic objects. The system can be considered very cheap and easy to install. It is scalable by simply adding Arduino microcontrollers and connecting new pressure sensors. Furthermore, the data acquisition is obtained through a software written in C# language. The prototype system can be used both in laboratory environments, useful for researchers in the field of WDN, as well as in real water networks, allowing the water utilities to improve the pressure monitoring in real cases. Thanks to the proposed system, it is possible to analyse small districts of WDNs and analyse in detail the pressure variation in all the nodes. This will help the water utilities to improve the network management and gives an indication for the optimisation of the detection of water losses.
The study is structured as follows.
Section 1 introduces the problem of the inefficiency of water distribution networks and presents studies related to the importance of the pressure measurements in order to have a correct discharge estimation. In
Section 2, the laboratory experimental facility is described.
Section 3 is dedicated to the presentation of the new pressure and discharge measurement system using an Arduino microprocessor. The results are described in
Section 4. Finally, the conclusions are provided in
Section 4.
2. Experimental Setup
In the following, the experimental apparatus is described. Basically, the water distribution network facility and the new pressure measurement system are described.
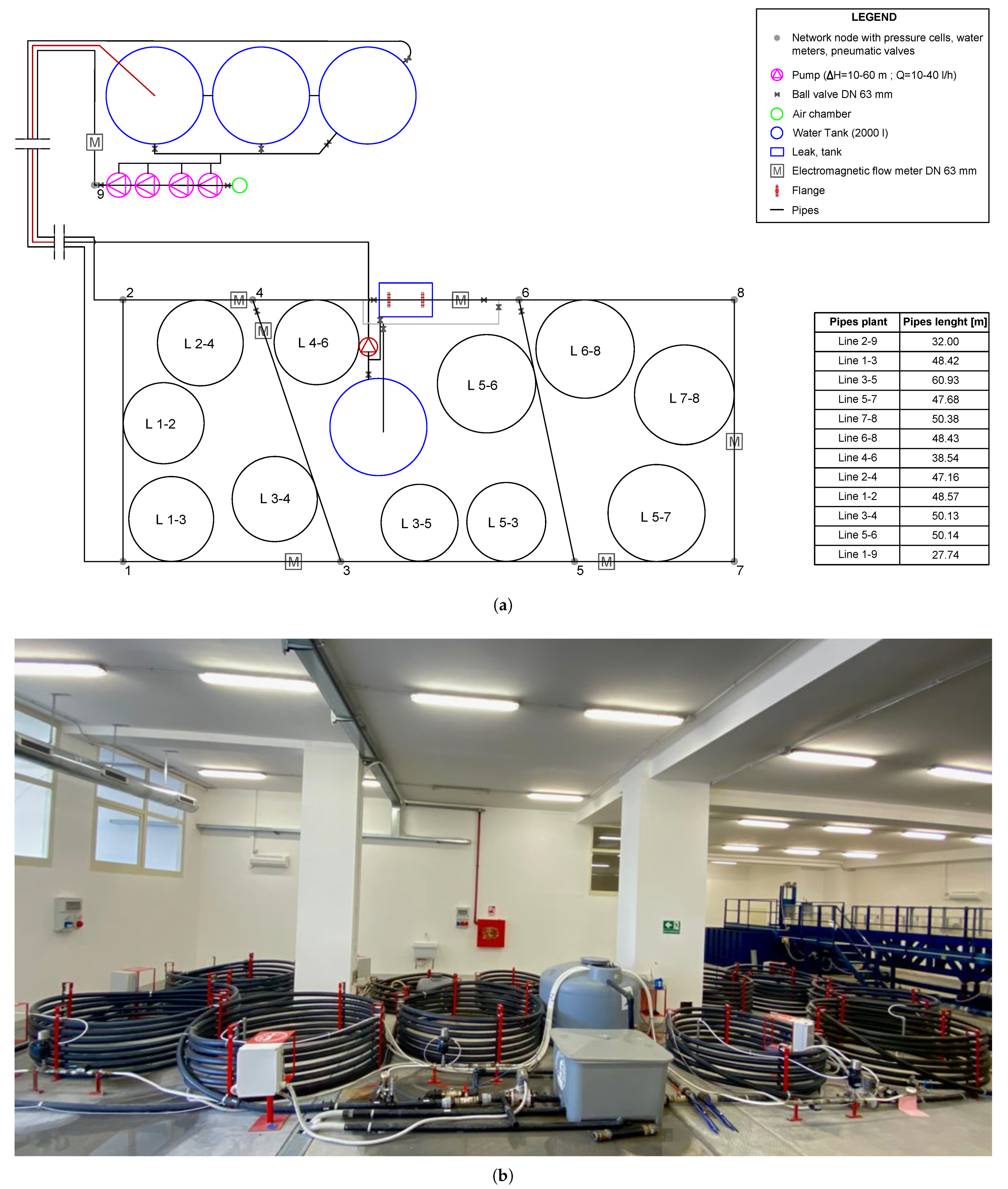
2.1. Water Distribution Network
The experimental campaign was carried out at the Environmental Hydraulic Laboratory of the University of Enna Kore (Italy) on a high-density polyethylene (HDPE 100 PN16) looped distribution network. The network has three loops, nine nodes, and eleven pipes, DN 63 mm. Each pipe is about 45 m long and is arranged in almost horizontal concentric circles, with bends having a radius of 2.0 m, thus ensuring that the form-resistance losses due to pipe bend can be neglected. The network is fed by three water tanks (they can store up to 6 mc overall). A schematic layout of the network is plotted in
Figure 1.
Four pumps (P) supply the needed discharge from the recycling reservoir to the upstream air vessel (AV), which behaves as a constant head tank, keeping the pressure constant and equal to a prescribed value by varying the speed of the pumps (total water head ranging from 20 to 60 m). The system is monitored by 7 electromagnetic flow meters located in pipes 9-2, 2-4, 4-6, 8-7, 5-7, 4-3, and 3-1 of the network. Pressure cells and multi-jet water meters are distributed over the whole network at each node position. Demands are assumed to occur at the node position. Four hand operated sphere valves are installed in order to control the flow in each loop. All the nodes are equipped with pneumatic valves able to regulate the water flow discharging into a local tank. Furthermore, node 5 is equipped with a rooftop tank (placed at 17.5 m above the network level). The other nodes are equipped with a ground level tank. Water demand occurring at the tank nodes can be modelled, either considering that the tank is interposed between the user and the network or considering that the user is directly connected to the network. The tanks are connected to the water distribution network by means of high-density polyethylene (HDPE 100 PN16) pipe 30 m long, with a diameter of 1/2”. To evaluate the water volume discharged into the private tank, electromagnetic flow meters and multi-jet water meters are used. The electromagnetic flow meters have an accuracy of 0.1. The pressure is measured throughout piezoelectric transducers (plotted in
Figure 2), working in the range of 0–6 bar.
The historical pressure measurement system is given by a supervisory control and data acquisition (SCADA). Therefore, the installed remote terminal unit offers an industrial solution combining performance, ease of implementation, and usability for all monitoring, process control, and remote management applications. The remote stations are configured through a user-friendly graphic interface. This step does not require any programming knowledge and uses clear language which makes configuration extremely simple.
The pipe discharge is measured through electromagnetic flow meters, plotted in
Figure 2, developed for industries operating in water treatment and distribution. The measurement is obtained with the same SCADA system used for the pressure transducers. Details on the water distribution system can be found in De Marchis and Milici [
20].
2.2. New Pressure Measurement System
The pressure measurement, as described in
Section 2, is obtained through 8 pressure cells installed in all the network nodes. The pressure transducers are equipped with a graduated strain gauge, directly in contact with water, able to transform the water pressure into supply voltage. The supply voltage is then transformed into an electrical signal with a current range of 4–20 mA. Once a current is generated, this must be converted into pressure data.
To acquire pressure in WDNs, several acquisition cards were developed, different for communication type and acquisition method; in the proposed application, the small microcontroller, known as an Arduino, was used to convert the electrical signal into digital pressure data.
Arduino collects the information provided by the sensors and periodically sends data via the Sigfox network. To do this, it has been programmed in a very simple C# software using the Microsoft Visual Studio Integrated Development Environment (IDE), executed by Microsoft “NET Framework”. In addition, external open-source libraries were implemented. Specifically, the “HTML Agility Pack” library was used to manage the network communication between the Arduino board webserver and the C# software; the Apache Log4Net library was added to obtain user-friendly output data.
Currently, there are several industrial solutions able to collect pressure data in WDNs, based on supervisory control and data acquisition (SCADA). These solutions are customary in the monitoring of complex water distribution systems, and their implementation is clearly efficient but quite expensive. Furthermore, SCADA systems are usually managed through service contracts with water utilities.
An alternative solution to commercial SCADA systems can be found using “Open Source” hardware and software, developing an economic and easily malleable monitoring approach able to have high performance in term of acquisition data. These types of software and hardware, not being bound by any type of EULA (End-User License Agreement), allow the creation of highly competitive systems that can be used in a wide range of applications. In the present research, an economic, open source, and low cost technology is proposed, collecting data thanks to wireless access. The proposed monitoring system, based on an Arduino microcontroller, has the following advantages both for research activity and industrial applications:
Reduces costs for the purchase of monitoring data loggers for the various instruments;
Reduces the management costs of water services linked to subscription services for monitoring;
Makes managers independent from any external monitoring service;
Adapts the monitoring system to market needs;
Allows for the complete management of the water service remotely.
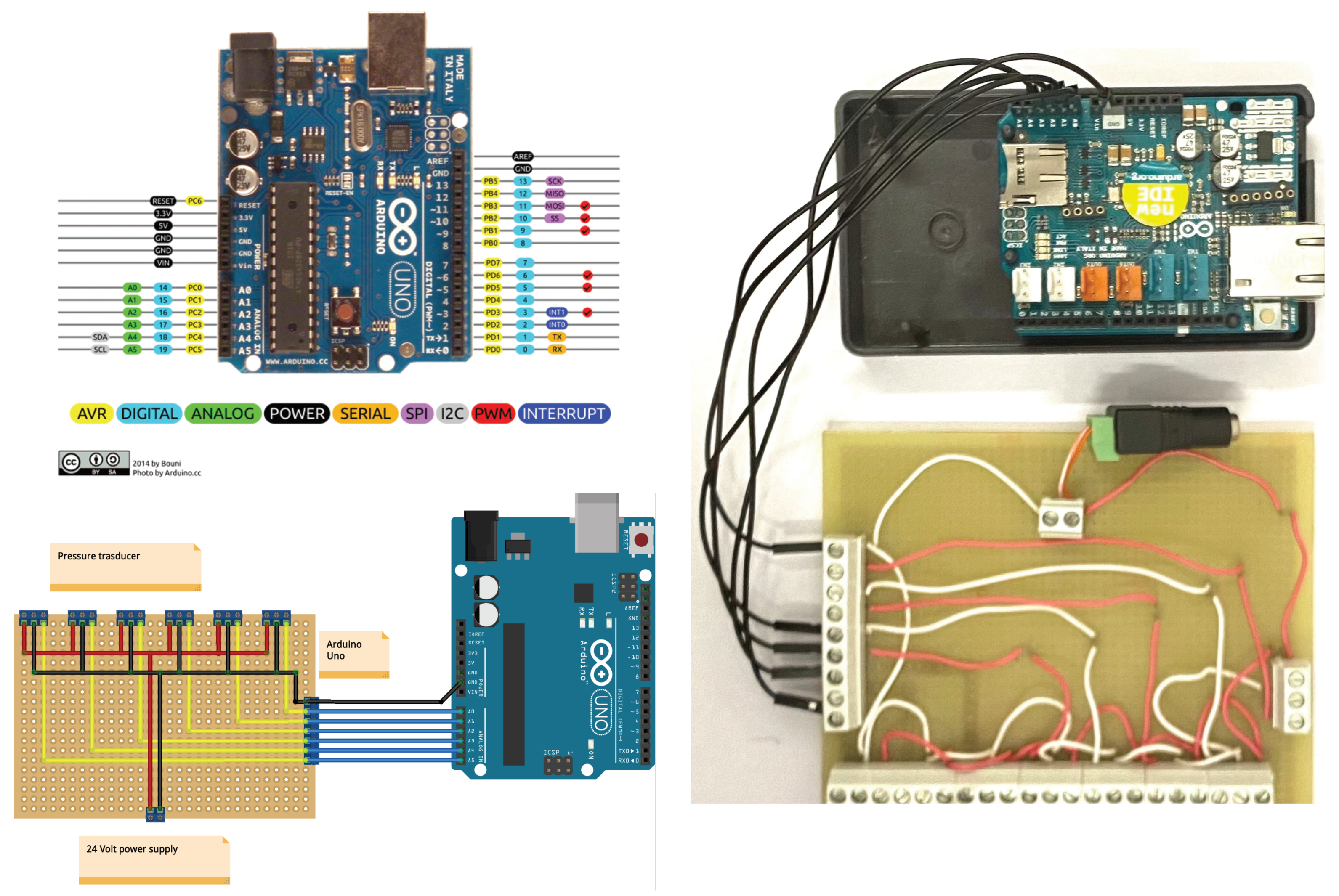
In
Figure 3, the Arduino pinout scheme and the prototype printed circuit board used to connect the pressure cells with Arduino card are reported.
Following the recent study of [
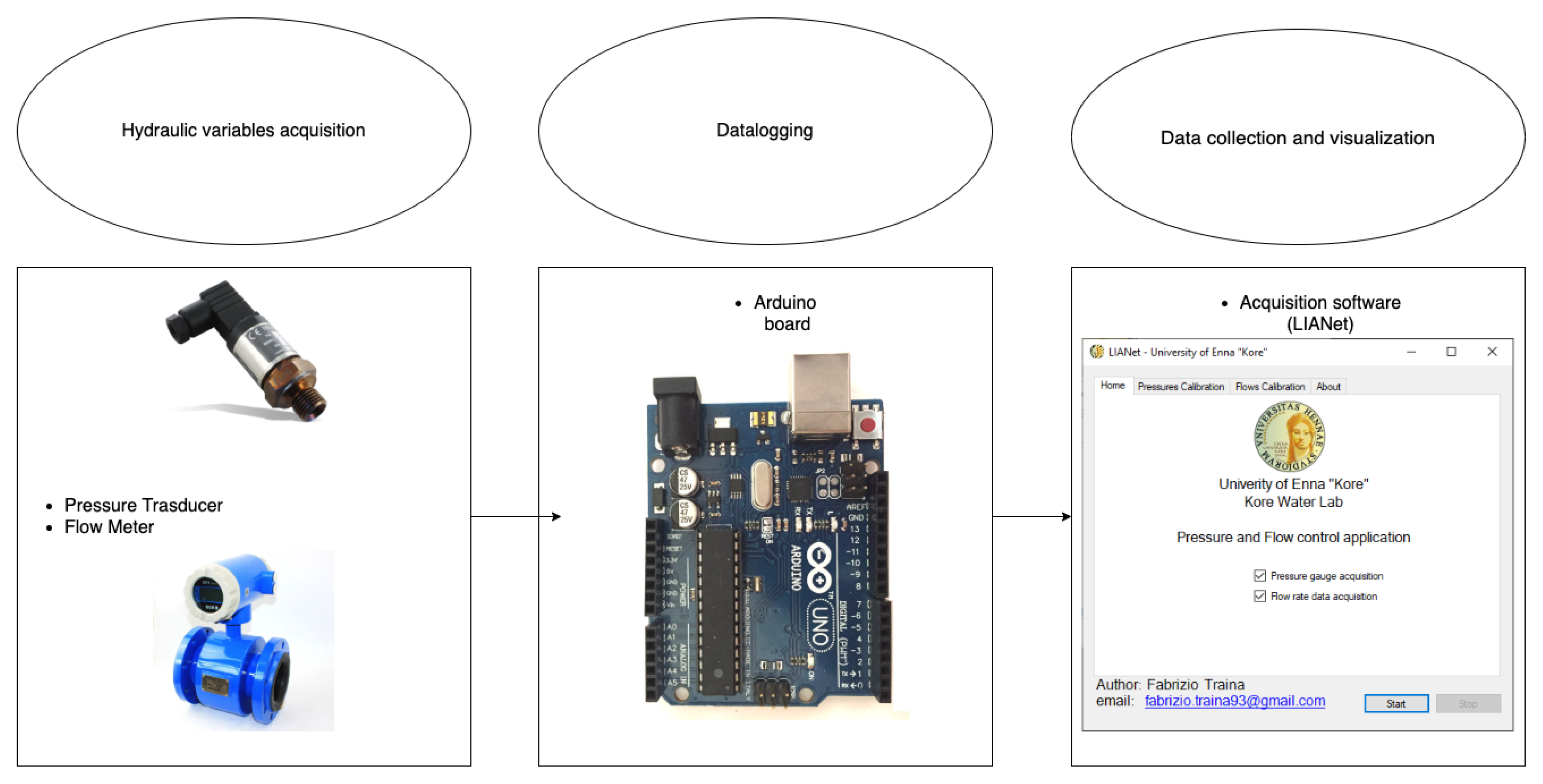
18], the monitoring system is based on the approach of Internet of things (IoT). In
Figure 4, the architecture of the proposed IoT pressure acquisition is shown.
Basically, the first level is the measurement of the hydraulic variables (i.e., pressure or flow discharge). The pressure transducers and the electromagnetic flow meters, installed in the laboratory WDN, were connected to the Arduino acquisition card through an electrical cable. The specific characteristics of the used meters are reported in the previous section. The second level is dedicated to the data logging of the measured data. The collected data are converted and sent to the device connected to the Arduino, through a Wi-Fi connection. Finally, all the data can be monitored and downloaded through a webpage in real time. The visualisation level is also used to help the water utilities in the management of the network. It is, in fact, possible to calibrate the pressure cells or change the sampling rate of the data.
In order to validate and verify the goodness of the proposed system, several tests were performed in the Water Kore Lab located at the University of Enna Kore, comparing the pressure measured using the proposed Arduino technologies with the system that is already installed in the WDN Laboratory, based on a SCADA system, a typical tool used by the water utilities in industrial applications. In the following, the results of the experiments performed to validate the proposed system are reported and discussed.
3. Results
In order to verify the proposed monitoring system, different experimental tests, in both hydrostatic and hydrodynamic conditions, were carried out. The initial experimental attempt was thus conducted to calibrate the pressure cells. Once calibrated, further experiments were dedicated to validating the proposed monitoring system.
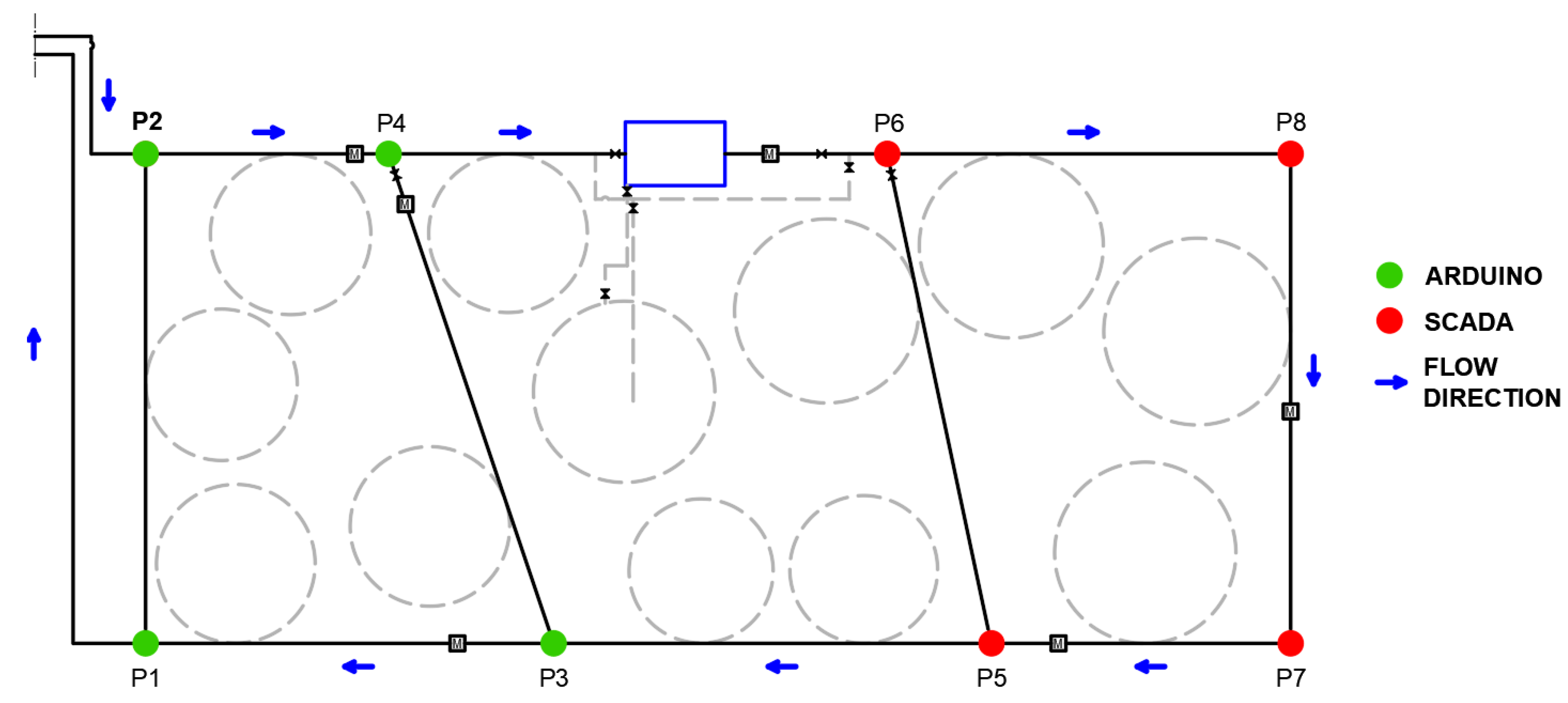
Each test was performed using the network configuration shown in
Figure 5. The flow direction is represented by the blue arrows. Basically, the WDN is configured as a classical inline pipe of about 500 m. The sensors P1, P2, P3, and P4, highlighted in green, are monitored by the Arduino microcontroller, while P5, P6, P7, and P8, highlighted in red, are monitored by the SCADA system. The comparison between the data obtained with the two monitoring tools was used to validate the prototype model.
3.1. Calibration Procedure
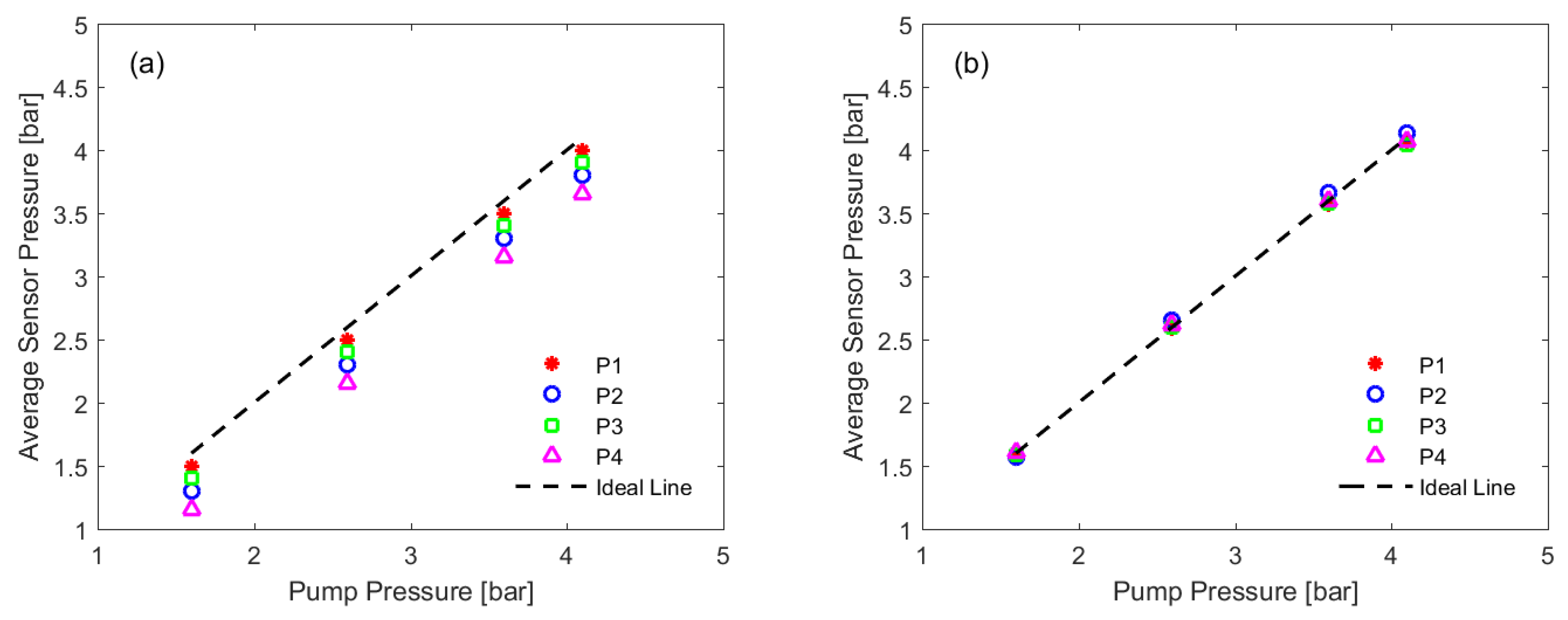
The transducers used in the proposed research convert the water pressure into a voltage signal. Most of the pressure sensors on the market work with a supply of 10 to 30 V to guarantee the perfect calibration of the sensor. Subsequently, the supply voltage is read by the Arduino as a measured RAW value, an integer number of a 1024 unit, and is then restored to pressure values expressed in bars. The conversion between voltage and pressure is ruled by a linear law; when the pressure is zero bar, a 0.24 V electrical volt is measured. Coherently, when the pressure is equal to 6 bar (maximum values measurable with the equipped sensors), 0.75 V is registered by the microcontroller. The transducers are frequently subjected to a signal deviation, and thus they require a calibration procedure, ensuring the correct measurement of the water pressure. In order to calibrate the sensors, the hydrostatic experiments, reported in
Table 1, were carried out. The experiments TC1-TC5 were repeated two times, before and after calibration, and the results are plotted in
Figure 6a,b, respectively.
In
Figure 6a, the averaged measured pressure, through the transducers, is plotted against the pressure imposed by the pump station. Clearly, in hydrostatic conditions, all the data should collapse with each other and with the dashed line, representing the perfect measurement. It can be shown that a huge deviation is registered, even though all the data are aligned in straight lines having the same slope. This result indicates that a calibration of the sensors is needed. The calibration was obtained through a very simple procedure described below. The measured pressure is converted through the following equation:
with
H[
i] being the water head in the
i-th sensor;
[
i] being the electrical signal measured with the pressure transducer;
B being a constant equal to 16.45, specific to the proposed prototype model; and
A[
i] being the intercept coefficient of each sensor. The calibration procedure can be easily obtained with an optimisation procedure by changing the che intercept
A[
i] to thus fit the desired pressure. Basically, the following steps were used: the sensors, connected to the Arduino, were placed at atmospheric pressure. Then, the coefficient
A[
i] was modified to have an average zero value of pressure. It is worthwhile to observe that the sensor calibration can be obtained with a single value of pressure, usually the atmospheric pressure.
Successively, the test cases reported in
Table 1 were exactly repeated. The results, reported in
Figure 6b, clearly show the correctness of the procedure. All the pressures measured by the four sensors connected with the Arduino collapse each other and have a very good agreement with the dashed line, representing the ideal measurements.
3.2. Validation Procedure
Once calibrated, experiments in hydrostatic as well as hydrodynamic conditions were conducted. These experiments were used to validate the proposed prototype system.
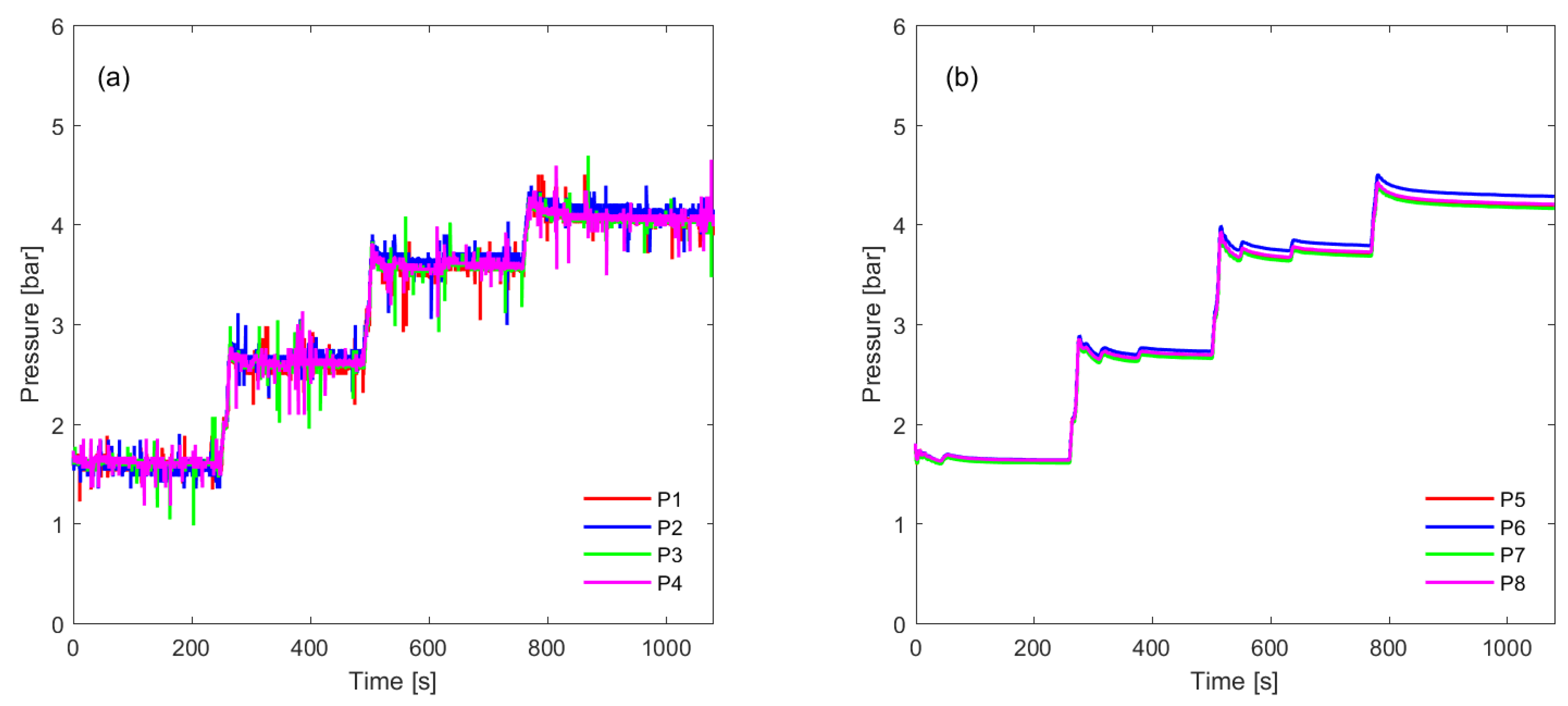
In
Table 2, some of the test cases are reported.
Figure 7a,b show the acquired data with the Arduino and SCADA during the first hydrostatic tests (TC4-TC7), respectively.
The comparison between the two measurements pointed out how the sensors P1, P2, P3, and P4, connected to the Arduino system, are characterised by a significantly higher data acquisition frequency than the sensors P5, P6, P7, and P8, connected to the SCADA. Thanks to the Arduino microprocessor, it was possible, in fact, to increase the number of data collected per second, thus improving the resolution of the acquisition and the quality of the measurement. The data oscillations reported in
Figure 7a are given by the high frequency of data acquisition. The averaged value, not shown here, collapses with the data, reported in
Figure 7b, acquired with the SCADA system. Moreover, the data show a good collapse between the four sensors connected with the Arduino microcontroller, independent of the water pressure.
Figure 7b, on the other hand, shows a small deviation in the measurement increasing the water pressure. Specifically, focusing attention on the results collected with the sensors P5, P6, P7, and P8 at 1 bar, a good collapse is observed, whereas looking at a pressure of about 4.1 bar (test TC11), a deviation of about 3–5% is registered.
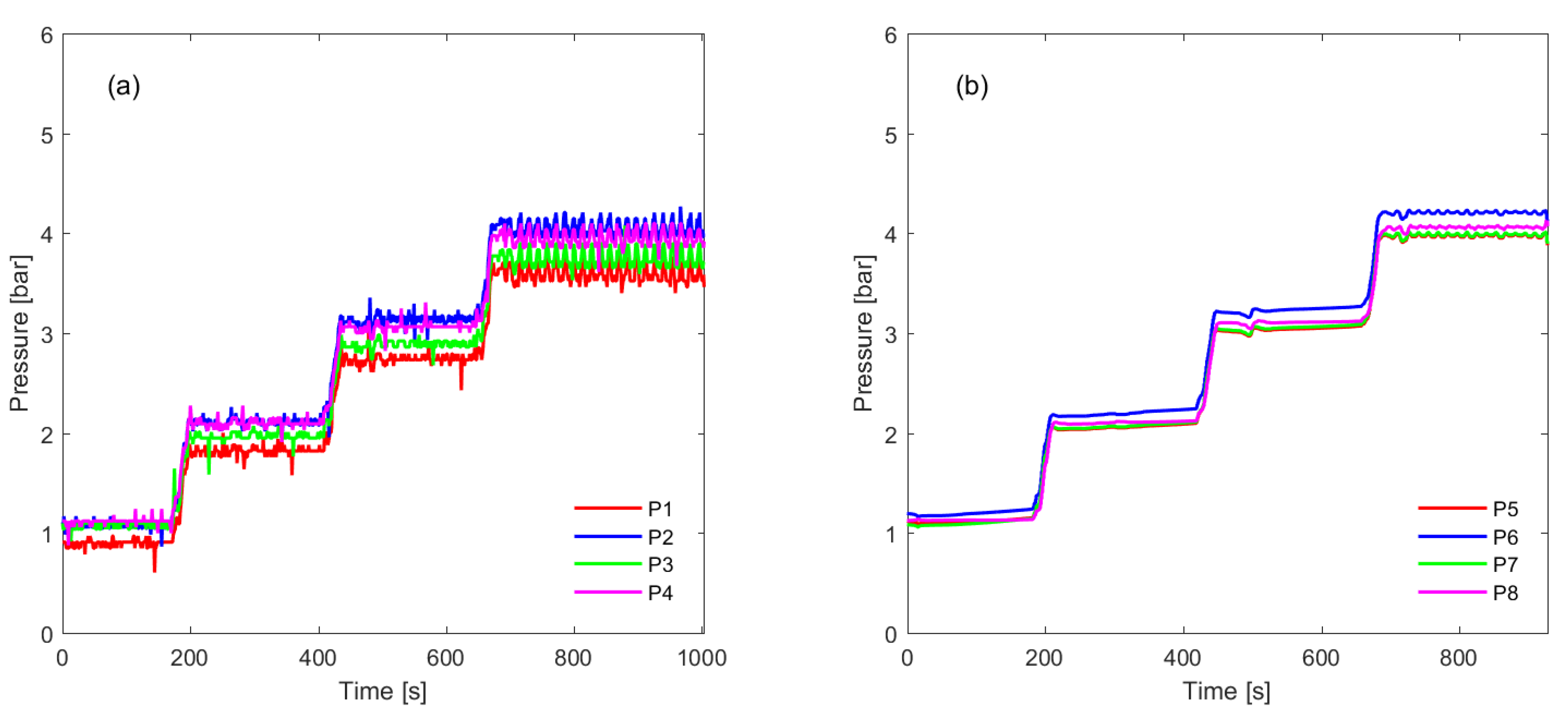
The two measurement systems, Arduino and SCADA, were also compared through hydrodynamic experiments. Four tests were carried out at values of flow rate and pressure increasing over time (see
Table 2, cases TC12-TC15). The results are plotted in
Figure 8. The test were performed considering an inline pipe of about 500 m. The flow direction is indicated in
Figure 5 with a blue arrow.
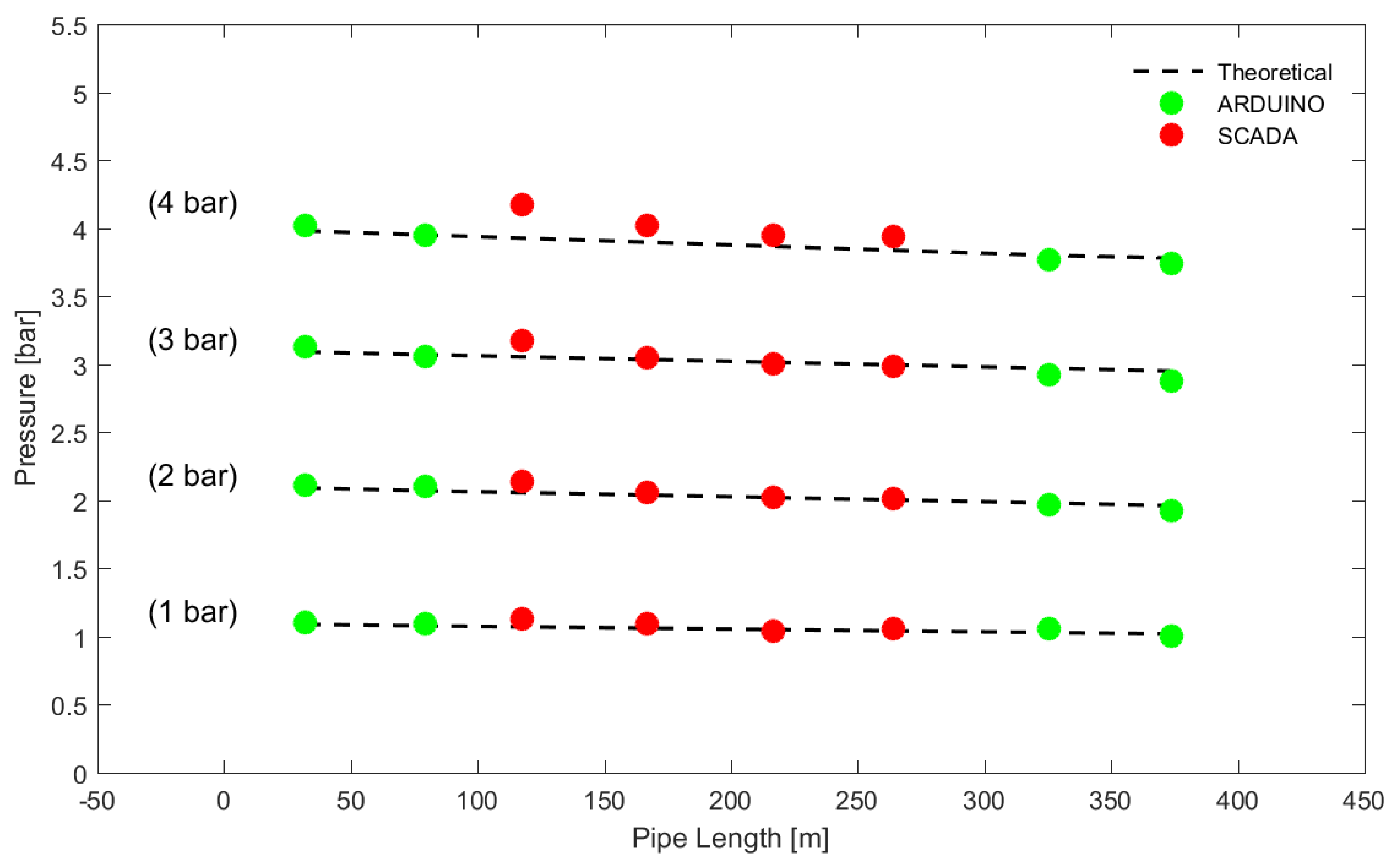
Figure 8 compares the pressure values recorded, confirming that Arduino system has a much higher data acquisition frequency than SCADA. In order to further validate the proposed system, the experimental data were compared with the results of theoretical equations. In
Figure 9, the comparison between the mathematical formulation data (dashed lines) and experimental (symbols) piezometric line is depicted.
The numerical piezometric line was obtained using the classical energy losses equation for circular pipes in turbulent flow condition, given by
=
r·
, where
is the upstream water head,
is the downstream water head,
r is the pipe resistance per unit flow rate, and
Q is the flow discharge. The experimental points reported in
Figure 9 were collected at the same time with the two measurement systems (SCADA and Arduino) and are obtained as the average value of the data reported in
Figure 8.
The plot confirms the above observation about the highest quality of measurement of the Arduino microcontroller.
Figure 9 clearly shows perfect agreement between the experimental data and the numerical piezometric line. On the other hand, the red points show a slight misalignment with the straight line. This deviation increases with the pressure, consistent with the observation of
Figure 7.
The results of the experimental campaigns clearly showed the ability of the proposed monitoring system to acquire hydrodynamic variable to manage WDNs. The efficiency of the Arduino board is further confirmed considering that it is a low cost system. An economic analysis of the Arduino system is reported in Pèrez-Padillo. The authors confirmed how the average cost of the measurement system is about EUR 100, a price lower (by up to 70%) than common industrial pressure monitoring systems existing on the market.
The proposed system can be considered an efficient solution able to study small districts of WDNs and analyse in detail the pressure variation in all the nodes. The pressure variation is a primary indicator of presence of water losses; thus, the proposed system can help water utilities in the management of small networks. Even though the prototyped measurement station can be considered an efficient and economic solution, some limitations were observed during the experimental campaign. The main problem is related to the fact that all the pressure transducers must be connected through a cable connection to the printed circuit board. This can be considered a bottleneck to a massive use in real urban water distribution networks. A modified version of the prototype is under development in order to use a wireless connection between the pressure cells and the Arduino microcontroller.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}