
Inclusion of Narrow Flow Paths between Buildings in Coarser Grids for Urban Flood Modeling: Virtual Surface Links



Abstract
:1. Introduction
2. Materials and Methods
2.1. Virtual Surface Links (VSL) Principle and Setup
2.2. Model Runs and Validation Strategy
- True positive (TP) = number of cells that are flooded in the simulation and observation;
- True negative (TN) = number of cells that are not flooded in the simulation and observation;
- False positive (FP) = number of cells that are flooded in the simulation, but dry in the observation;
- False negative (FN) = number of cells that are dry in the simulation, but flooded in the observation.
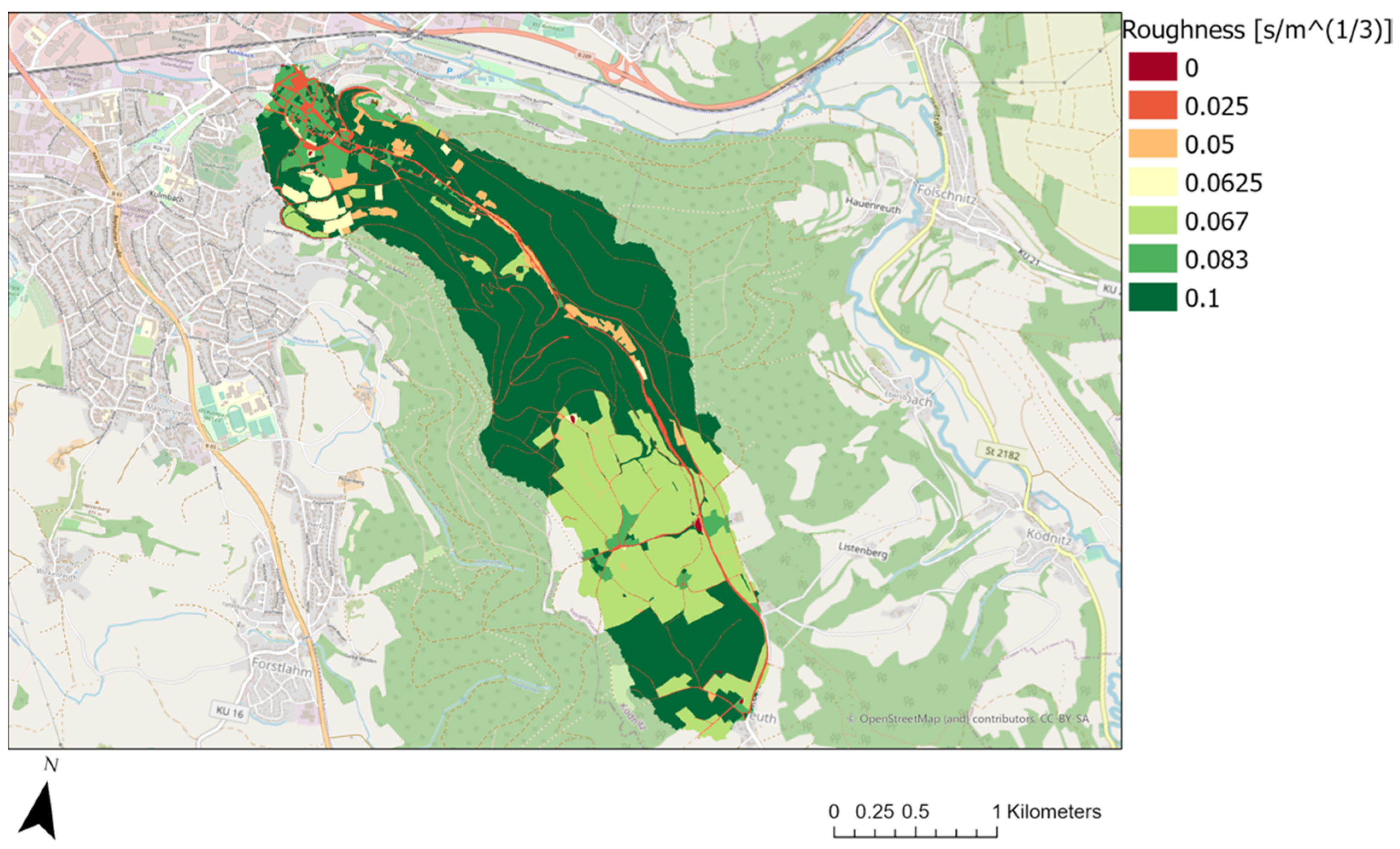
2.3. Site Description
2.4. Model Description
2.4.1. PCSWMM/SWMM—1D Dynamic Model
2.4.2. P-DWave 2D—2D Diffusive Wave Model
2.4.3. Coupling Process between SWMM and P-DWave 2D
3. Results
3.1. DSWMM/2DP-DWave 2D Dual-Drainage Model
3.1.1. First Stage of Validation: Test Case
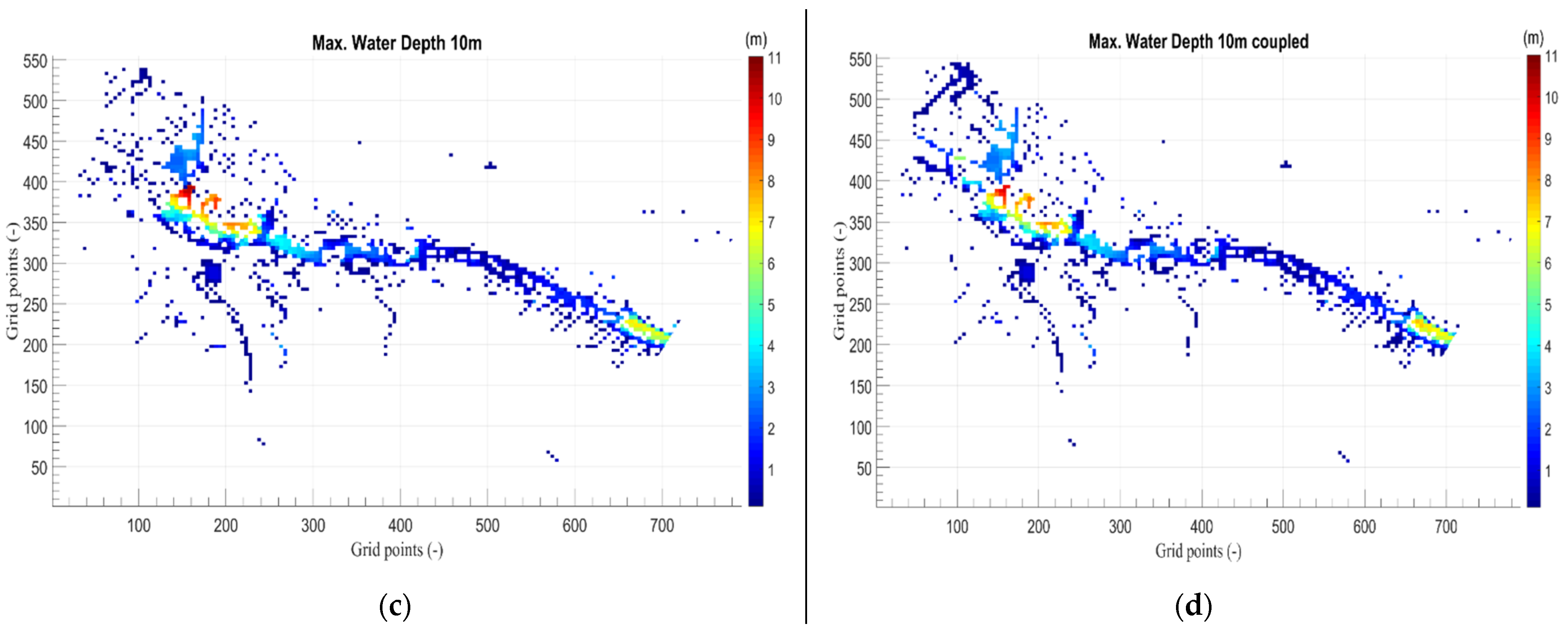
3.1.2. Second Stage of Validation: Case Study
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Şen, Z. Flood Modeling, Prediction and Mitigation; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Sene, K. Flash Floods; Springer: Dordrecht, The Netherlands, 2013. [Google Scholar]
- Sampson, C.C.; Fewtrell, T.J.; Duncan, A.; Shaad, K.; Horritt, M.S.; Bates, P.D. Use of terrestrial laser scanning data to drive decimetric resolution urban inundation models. Adv. Water Resour. 2012, 41, 1–17. [Google Scholar] [CrossRef]
- Gallegos, H.A.; Schubert, J.E.; Sanders, B.F. Two-dimensional, high-resolution modeling of urban dam-break flooding: A case study of Baldwin Hills, California. Adv. Water Resour. 2009, 32, 1323–1335. [Google Scholar] [CrossRef]
- Paquier, A.; Mignot, E.; Bazin, P.-H. From Hydraulic Modelling to Urban Flood Risk. Procedia Eng. 2015, 115, 37–44. [Google Scholar] [CrossRef]
- Betsholtz, A.; Nordlöf, B. Potentials and Limitations of 1D, 2D and Coupled 1D-2D Flood Modelling in HEC-RAS. Master’s Thesis, University Lund, Lund, Sweden, 2017. [Google Scholar]
- de Almeida, G.A.M.; Bates, P.; Ozdemir, H. Modelling urban floods at submetre resolution: Challenges or opportunities for flood risk management? J. Flood Risk Manag. 2018, 11, S855–S865. [Google Scholar] [CrossRef] [Green Version]
- Esri Resampling. Available online: https://desktop.arcgis.com/de/arcmap/10.3/tools/data-management-toolbox/resample.htm (accessed on 9 May 2021).
- Vojinovic, Z.; Seyoum, S.; Salum, M.H.; Price, R.K.; Fikri, A.K.; Abebe, Y. Modelling floods in urban areas and representation of buildings with a method based on adjusted conveyance and storage characteristics. J. Hydroinform. 2012, 15, 1150–1168. [Google Scholar] [CrossRef]
- Fewtrell, T.; Bates, P.; Horritt, M.; Hunter, N. Evaluating the effect of scale in flood inundation modelling in urban environments. Hydrol. Process. 2008, 22, 5107–5118. [Google Scholar] [CrossRef]
- Chen, A.; Evans, B.; Djordjević, S.; Savic, D. A coarse-grid approach to representing building blockage effects in 2D urban flood modelling. J. Hydrol. 2012, 426, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Yu, D.; Lane, S.N. Urban fluvial flood modelling using a two-dimensional diffusion-wave treatment, part 1: Mesh resolution effects. Hydrol. Process. 2006, 20, 1541–1565. [Google Scholar] [CrossRef]
- Maksimovic, C.; Prodanovic, D. Modelling of Urban Flooding—Breakthrough or Recycling of Outdated Concepts. In Urban Drainage Modeling; American Society of Civil Engineers: Reston, VA, USA, 2001; pp. 1–9. [Google Scholar]
- Mark, O.; Weesakul, S.; Apirumanekul, C.; Aroonnet, S.B.; Djordjević, S. Potential and limitations of 1D modelling of urban flooding. J. Hydrol. 2004, 299, 284–299. [Google Scholar] [CrossRef]
- Neal, J.; Fewtrell, T.; Bates, P.; Wright, N. A comparison of three parallelisation methods for 2D flood inundation models. Environ. Model. Softw. 2010, 25, 398–411. [Google Scholar] [CrossRef]
- Guo, K.; Guan, M.; Yu, D. Urban surface water flood modelling—A comprehensive review of current models and future challenges. Hydrol. Earth Syst. Sci. 2021, 25, 2843–2860. [Google Scholar] [CrossRef]
- MacNeice, P.; Olson, K.M.; Mobarry, C.; de Fainchtein, R.; Packer, C. Paramesh: A parallel adaptive mesh refinement community toolkit. Comput. Phys. Commun. 2000, 126, 330–354. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.-H.; Chung, M.-K.; Yang, S.-Y.; Hsu, C.-T.; Wu, S.-J. Improving the Computational Performance of an Operational Two-Dimensional Real-Time Flooding Forecasting System by Active-Cell and Multi-Grid Methods in Taichung City, Taiwan. Water 2018, 10, 319. [Google Scholar] [CrossRef] [Green Version]
- Sanders, B.F.; Schubert, J.E. PRIMo: Parallel raster inundation model. Adv. Water Resour. 2019, 126, 79–95. [Google Scholar] [CrossRef]
- Dewals, B.; Bruwier, M.; Pirotton, M.; Erpicum, S.; Archambeau, P. Porosity Models for Large-Scale Urban Flood Modelling: A Review. Water 2021, 13, 960. [Google Scholar] [CrossRef]
- Leandro, J.; Schumann, A.; Pfister, A. A step towards considering the spatial heterogeneity of urban key features in urban hydrology flood modelling. J. Hydrol. 2016, 535. [Google Scholar] [CrossRef]
- Schubert, J.E.; Sanders, B.F. Building treatments for urban flood inundation models and implications for predictive skill and modeling efficiency. Adv. Water Resour. 2012, 41, 49–64. [Google Scholar] [CrossRef]
- Chen, A.; Djordjević, S.; Leandro, J.; Savic, D. The urban inundation model with bidirectional flow interaction between 2D overland surface and 1D sewer networks. In Proceedings of the NOVATECH 2007, Lyon, France, 25 June 2007; pp. 465–472. [Google Scholar]
- Rossman, L.A. Storm Water Management Model Reference Manual Volume II—Hydraulics; U.S. Environmental Protection Agency: Washington, DC, USA, 2017.
- Rossman, L.A.; Huber, W.C. Storm Water Management Model Reference Manual Volume I—Hydrology (Revised); U.S. Environmental Protection Agency: Washington, DC, USA, 2016.
- Crispino, G.; Gisonni, C.; Iervolino, M. Flood hazard assessment: Comparison of 1D and 2D hydraulic models. Int. J. River Basin Manag. 2015, 13, 153–166. [Google Scholar] [CrossRef]
- Itwh HYSTEM-EXTRAN. Available online: https://itwh.de/en/software-products/desktop/hystem-extran/ (accessed on 18 September 2021).
- CHI PCSWMM. Available online: https://www.pcswmm.com/ (accessed on 18 September 2021).
- Innovyze Basic 2D Hydraulic Theory. Available online: https://help2.innovyze.com/infoworksicm/Content/HTML/ICM_ILCM/Basic_2D_Hydraulic_Theory.htm (accessed on 16 September 2021).
- DHI. MOUSE Pipe Flow Reference Manual; DHI: New York, NY, USA, 2019. [Google Scholar]
- Freni, G.; Ferreri, G.; Tomaselli, P. Ability of Software SWMM to Simulate transient sewer smooth pressurization. Water Sci. Technol. J. Int. Assoc. Water Pollut. Res. 2010, 62, 1848–1858. [Google Scholar]
- Kourtis, I.; Kopsiaftis, G.; Bellos, V.; Tsihrintzis, V. Calibration and validation of SWMM model in two urban catchments in Athens, Greece. In Proceedings of the International Conference on Environmental Science and Technology (CEST), Rhodes, Greece, 31 August–2 September 2017. [Google Scholar]
- Vasconcelos, J.; Eldayih, Y.; Zhao, Y.; Jamily, J. Evaluating Storm Water Management Model Accuracy in Conditions of Mixed Flows. J. Water Manag. Model. 2018, 27, C451. [Google Scholar] [CrossRef] [Green Version]
- Niazi, M.; Nietch, C.; Maghrebi, M.; Jackson, N.; Bennett, B.; Tryby, M.; Massoudieh, A. Storm Water Management Model: Performance Review and Gap Analysis. J. Sustain. Water Built Environ. 2017, 3, 04017002. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leandro, J.; Chen, A.S.; Schumann, A. A 2D parallel diffusive wave model for floodplain inundation with variable time step (P-DWave). J. Hydrol. 2014, 517, 250–259. [Google Scholar] [CrossRef]
- Leandro, J.; Martins, R. A methodology for linking 2D overland flow models with the sewer network model SWMM 5.1 based on dynamic link libraries. Water Sci. Technol. J. Int. Assoc. Water Pollut. Res. 2016, 73, 3017–3026. [Google Scholar]
- Hafnaoui, M.; Carvalho, R.; Debabeche, M. Prediction of Hydraulic Jump location in Some Types of Prismatic Channels using Numerical Modelling. In Proceedings of the 6th International Junior Researcher and Engineer Workshop on Hydraulic Structures (IJREWHS 2016), Lübeck, Germany, 30 May–1 June 2016. [Google Scholar]
- Martins, R.; Leandro, J.; Chen, A.; Djordjević, S. A comparison of three dual drainage models: Shallow water vs. local inertial vs. diffusive wave. J. Hydroinform. 2017, 19, jh2017075. [Google Scholar]
- Pflugbeil, T.; Roich, K.; Disse, M. Hydrodynamic simulation of the flash flood events in Baiersdorf and Simbach (Bavaria)—A model comparison. EGU Gen. Assem. 2019, 21, 15509. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Observation (2 m Simulation) | ||||
|---|---|---|---|---|
| Dry (0) | Flooded (1) | |||
| Stimulation | Dry (0) | True negative (0/0) | False negative (0/1) | NPV FOR |
| Flooded (1) | False positive (1/0) | True positive (1/1) | PVV FDR | |
| TNR FPR | TPR FNR | Total Accuracy | ||
| Type | Description | Equation |
|---|---|---|
| Positive predictive value (PVV) | Percentage of correctly predicted flooded cells | |
| False discovery rate (FDR) | Percentage of wrongly predicted flooded cells | |
| False omission rate (FOR) | Percentage of wrongly predicted dry cells | |
| Negative predictive value (NPV) | Percentage of correctly predicted dry cells | |
| True positive rate (TPR) | Percentage of flooded cells that are also simulated as flooded | |
| False negative Rate (FNR) | Percentage of flooded cells that are not simulated as flooded | |
| False positive rate (FPR) | Percentage of flooded cells that are not simulated as dry | |
| True negative Rate (TNR) | Percentage of flooded cells that are also simulated as dry | |
| Total accuracy (ACC) | Percentage of the overall correctly simulated cells |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramsauer, S.; Leandro, J.; Lin, Q. Inclusion of Narrow Flow Paths between Buildings in Coarser Grids for Urban Flood Modeling: Virtual Surface Links. Water 2021, 13, 2629. https://doi.org/10.3390/w13192629
Ramsauer S, Leandro J, Lin Q. Inclusion of Narrow Flow Paths between Buildings in Coarser Grids for Urban Flood Modeling: Virtual Surface Links. Water. 2021; 13(19):2629. https://doi.org/10.3390/w13192629
Chicago/Turabian StyleRamsauer, Sebastian, Jorge Leandro, and Qing Lin. 2021. "Inclusion of Narrow Flow Paths between Buildings in Coarser Grids for Urban Flood Modeling: Virtual Surface Links" Water 13, no. 19: 2629. https://doi.org/10.3390/w13192629
APA StyleRamsauer, S., Leandro, J., & Lin, Q. (2021). Inclusion of Narrow Flow Paths between Buildings in Coarser Grids for Urban Flood Modeling: Virtual Surface Links. Water, 13(19), 2629. https://doi.org/10.3390/w13192629