
Intelligent Prediction Method for Waterlogging Risk Based on AI and Numerical Model


Abstract
:1. Introduction
2. Data and Methods
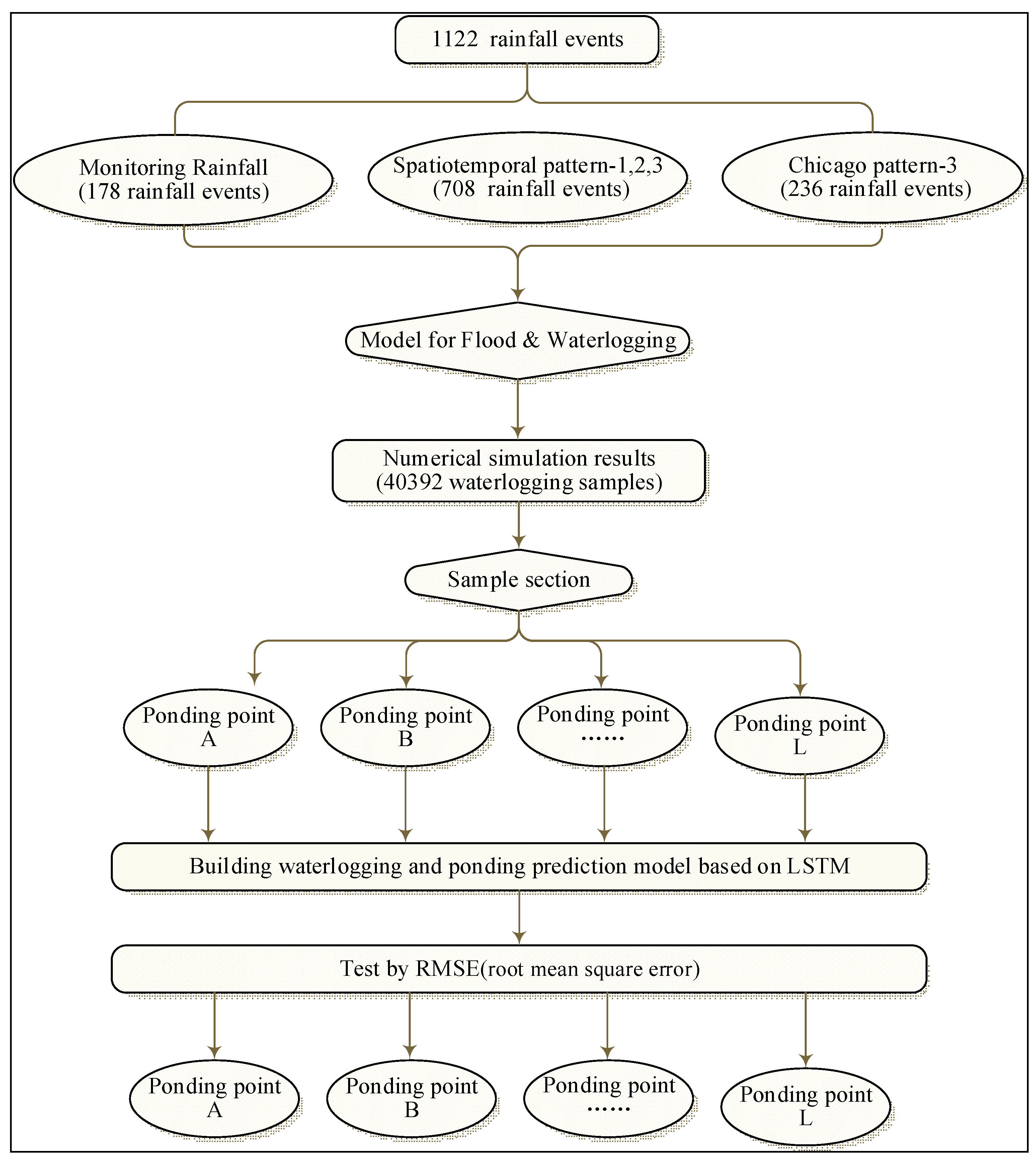
2.1. Research Process
2.2. Methods
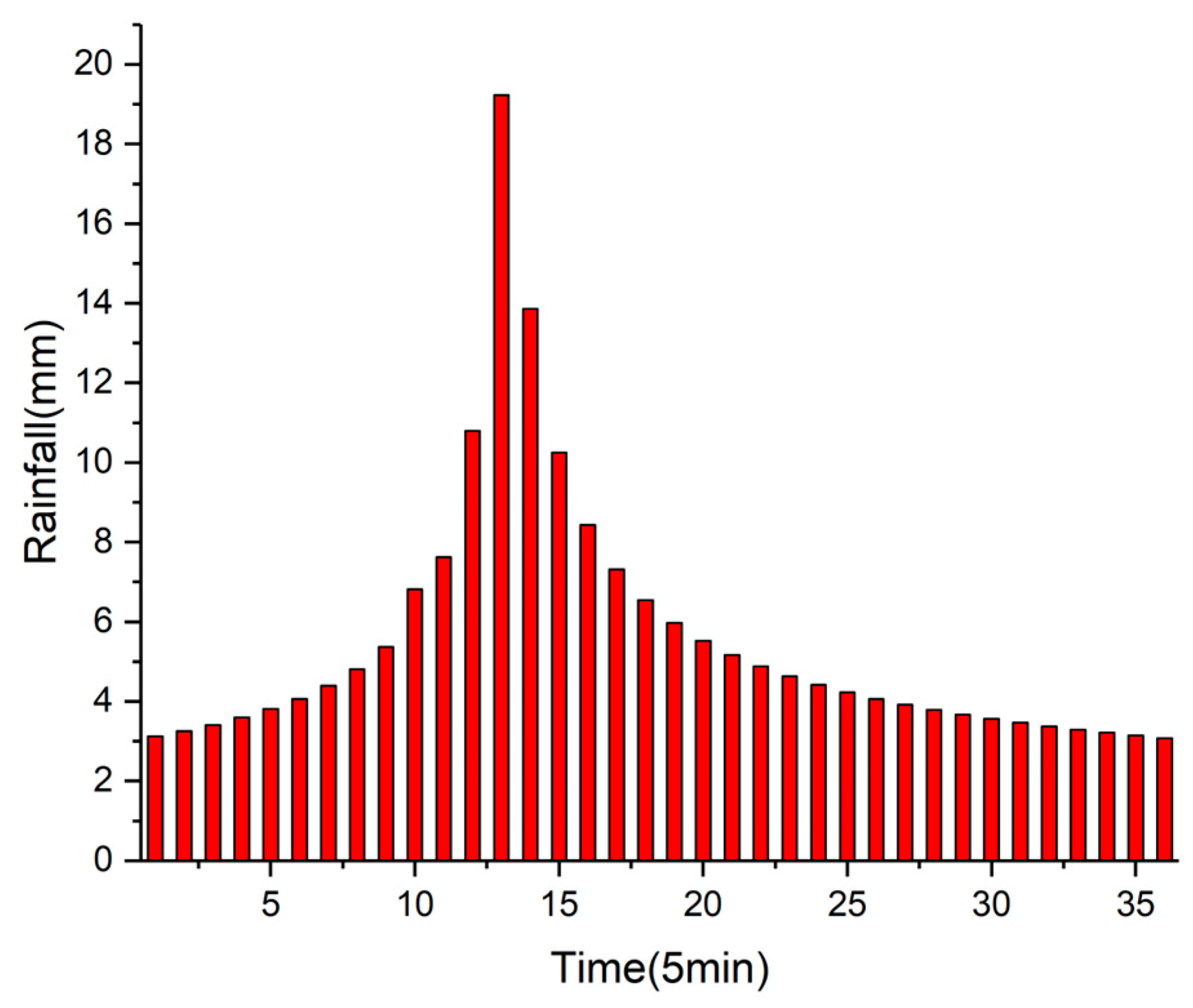
2.2.1. Construction of Rainfall Schemes
- Actual short-duration heavy rainfallscheme
- 2.
- Characteristic rainfall schemes with different temporal and spatial distributions
- 3.
- The rainfall process with the Chicago rainfall pattern
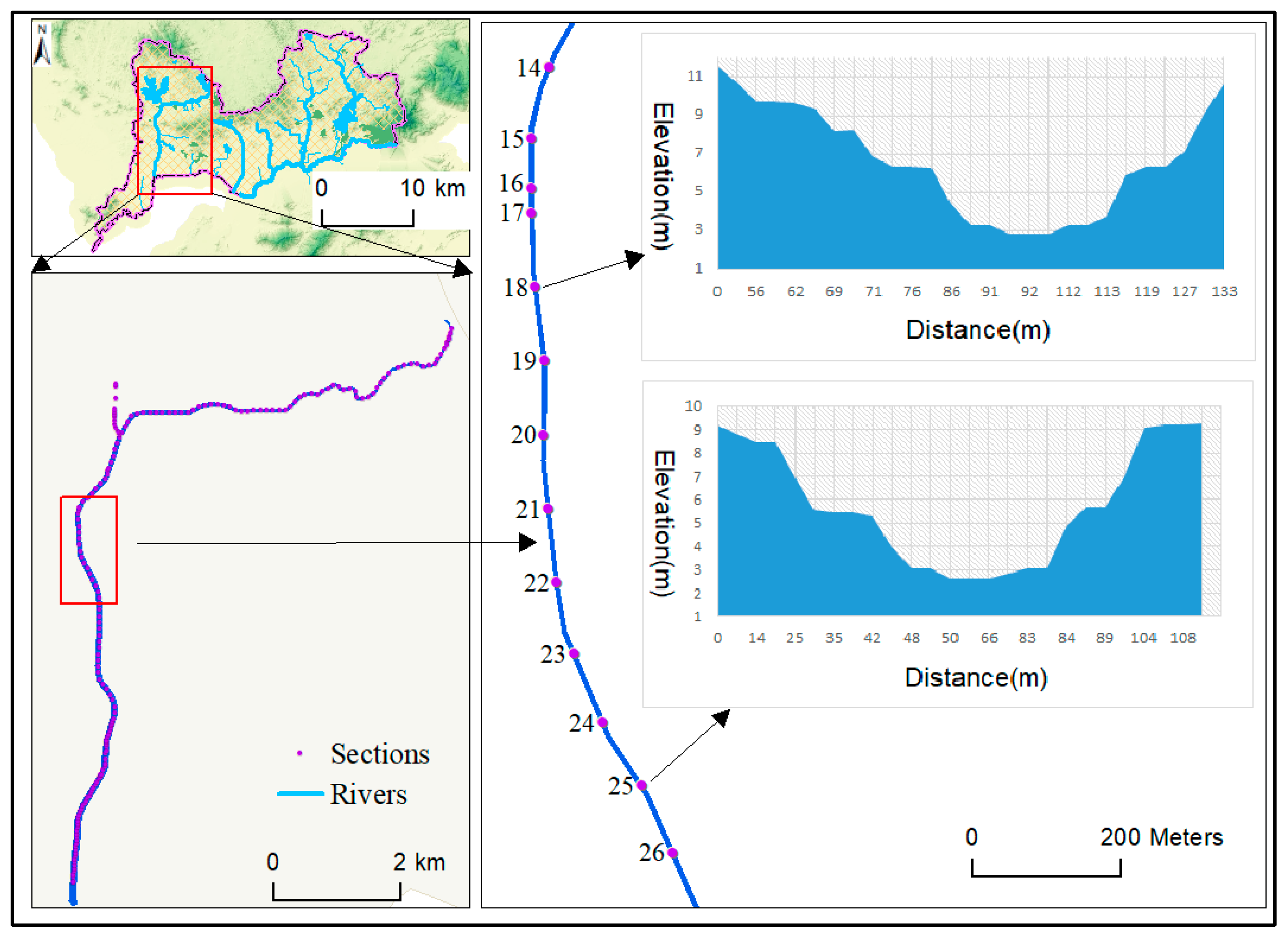
2.2.2. Numerical Simulation Model
- One dimensional hydrodynamic model of river channel
- 2.
- Surface runoff model
- 3.
- Underground pipe network confluence model
2.2.3. Training Samples
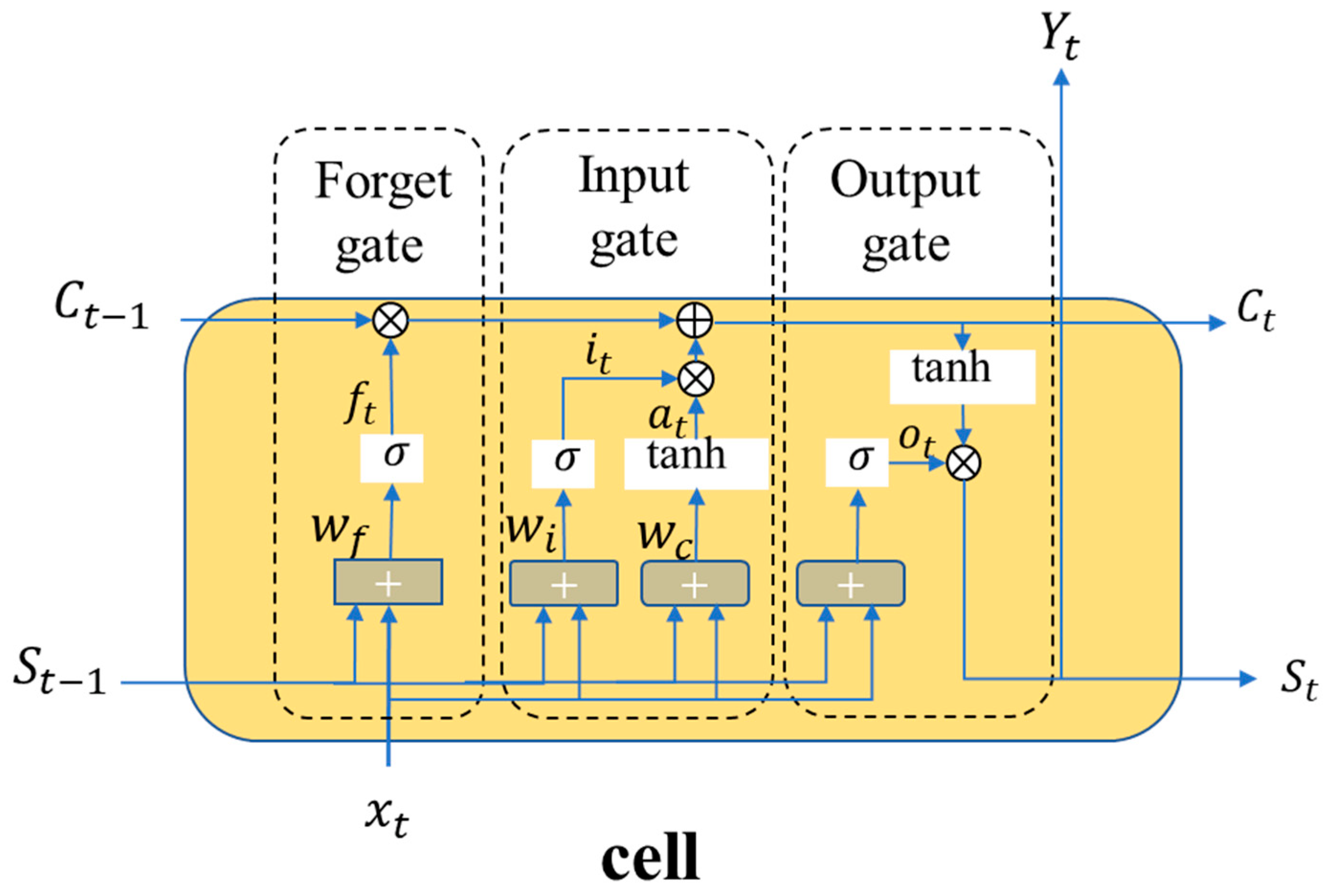
2.2.4. Introduction to LSTM Neural Network Model
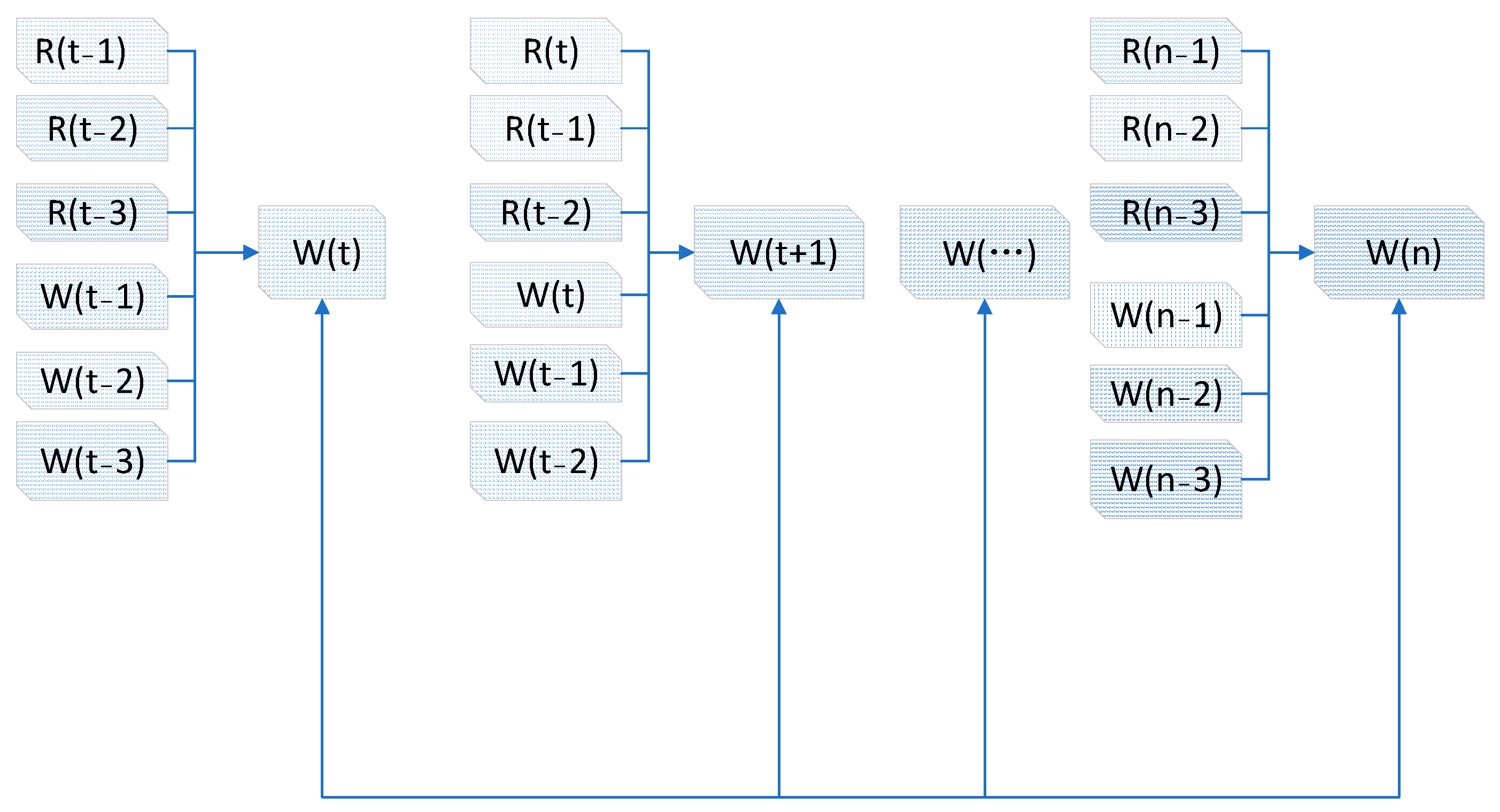
2.2.5. Waterlogging and Ponding Prediction Model Based on LSTM
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tingsanchali, T. Urban flood disaster management. Procedia Eng. 2012, 32, 25–37. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Xi, C.; Zhu, Z.; Xie, Y.; Kai, L. The changing pattern of urban flooding in Guangzhou, China. Sci. Total Environ. 2017, 622–623, 394. [Google Scholar] [CrossRef] [PubMed]
- Jha, A.; Lamond, J.; Proverbs, D.; Bhattacharya-Mis, N.; Barker, R. Cities and Flooding: A Guide to Integrated Urban Flood Risk Management for the 21st Century; World Bank Publications: Washington, DC, USA, 2012. [Google Scholar]
- Cheng, X.T. Urban Water Disasters and Strategy of Comprehensive Control of Water Disaster. J. Catastrophol. 2010, 25, 10–15. [Google Scholar]
- Seyoum, S.D.; Vojinovic, Z.; Price, R.K.; Weesakul, S. Coupled 1D and Noninertia 2D Flood Inundation Model for Simulation of Urban Flooding. J. Hydraul. Eng. 2012, 138, 23–34. [Google Scholar] [CrossRef]
- Zhou, H.-L.; Chen, Y.-B. 2D shallow-water simulation for urbanized areas. Adv. Water Sci. 2011, 22, 407–412. [Google Scholar]
- Guo, K.H.; Guan, M.F.; Yu, D.P. Urban surface water flood modelling: A comprehensive review of current models and future challenges. Hydrol. Earth Syst. Sci. 2021, 25, 2843–2860. [Google Scholar] [CrossRef]
- Zhang, H.P.; Wu, W.M.; Hu, C.H.; Hu, C.; Li, M.; Hao, X.; Liu, S. A distributed hydrodynamic model for urban storm flood risk assessment. J. Hydrol. 2021, 600, 126513. [Google Scholar] [CrossRef]
- DHI. MIKE 1D, DHI Simulation Engine for 1D River and Urban Modelling; DHI: Singapore, 2012. [Google Scholar]
- DHI. MIKE 21 Flow Model FM, Hydrodynamic and Transport Module, Scientific Documentation; DHI: Singapore, 2007. [Google Scholar]
- Rangari, V.A.; Umamahesh, N.V.; Bhatt, C.M. Assessment of inundation risk in urban floods using HEC RAS 2-D. Model. Earth Syst. Environ. 2019, 5, 1839–1851. [Google Scholar] [CrossRef]
- Huang, G.; Chen, W.; Yu, H. Construction and evaluation of an integrated hydrological and hydrodynamics urban flood model. Adv. Water Sci. 2021, 32, 334–344. [Google Scholar]
- Jiang, C.; Zhou, Q.; Yu, W.; Yang, C.; Lin, B. A dynamic bidirectional coupled surface flow model for flood inundation simulation. Nat. Hazards Earth Syst. Sci. 2021, 21, 497–515. [Google Scholar] [CrossRef]
- Hu, C.; Xia, J.; She, D.X.; Song, Z.; Zhang, Y.; Hong, S. A new urban hydrological model considering various land covers for flood simulation. J. Hydrol. 2021, 603, 126833. [Google Scholar] [CrossRef]
- Soares-Frazao, S.; Lhomme, J.; Guinot, V.; Zech, Y. Two-dimensional shallow-water model with porosity for urban flood modelling. J. Hydraul. Res. 2008, 46, 45–64. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- Meer, P.; Mintz, D.; Rosenfeld, A.; Dong, Y.K. Robust regression methods for computer vision: A review. Int. J. Comput. Vis. 1991, 6, 59–70. [Google Scholar] [CrossRef]
- Sundermeyer, M.; Schlüter, R.; Ney, H. LSTM Neural Networks for Language Modeling. In Proceedings of the Interspeech, Portland, OR, USA, 9–13 September 2012. [Google Scholar]
- Liu, Y.Y.; Li, L.; Zhang, W.H.; Chan, P.W.; Liu, Y.S. Rapid identification of rainstorm disaster risks based on an artificial intelligence technology using the 2DPCA method. Atmos. Res. 2019, 227, 157–164. [Google Scholar] [CrossRef]
- Qing, L.; Hai-tao, X.; Jun-liang, Y. Daily Water Volume Prediction Algorithm of Urban Smart Water Based on Big Data. J. Beijing Univ. Posts Telecommun. 2021, 44, 82–88. [Google Scholar]
- Barzegar, R.; Aalami, M.T.; Adamowski, J.F. Coupling a Hybrid CNN-LSTM Deep Learning Model with a Boundary Corrected Maximal Overlap Discrete Wavelet Transform for Multiscale Lake Water Level Forecasting. J. Hydrol. 2021, 598, 126196. [Google Scholar] [CrossRef]
- Xinjun, W.; Xiaodong, Z.; Xi, D.; Zhentao, X.; Cheng, Q. CNN flood routing method based on data-driven training. J. Hydroelectr. Eng. 2021, 40, 8. [Google Scholar]
- Ganggang, B.; Jingming, H.; Hao, H.; Junqiang, X.; Bingyao, L. Intelligent monitoring method for road inundation based on deep learning. Water Resour. Prot. 2021, 37, 6. [Google Scholar]
- Gao, X.; Liu, J. Effect of Urbanization on River Hydrological Process in Shenzhen River Basin. Acta Sci. Nat. Univ. Pekin. 2012, 48, 153–159. [Google Scholar]
- Liu, Y.-Y.; Li, Z.; Lei, L.; Yesen, L. Storm surge nowcasting based on multivariable LSTM neural network model. Mar. Sci. Bull. 2020, 39, 689–694. [Google Scholar]
- Liu, Y.-Y.; Li, L.; Liu, Y.-S.; Chan, P.W.; Zhang, W.-H. Dynamic spatial-temporal precipitation distribution models for short-duration rainstorms in Shenzhen, China based on machine learning. Atmos. Res. 2020, 237, 104861. [Google Scholar] [CrossRef]
- Leandro, J.; Chen, A.S.; Djordjevic, S.; Savic, D.A. Comparison of 1D/1D and 1D/2D Coupled (Sewer/Surface) Hydraulic Models for Urban Flood Simulation. J. Hydraul. Eng. 2009, 135, 495–504. [Google Scholar] [CrossRef]
- Preissmann, A.; Cunge, J.A. Calcul des intumeseences sur machines electroniques. In Proceedings of the Ninth Convention of the International Association for Hydraulic Research, Dubrovnik, Croatia, 4–7 September 1961. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Schmidhuber, J.; Gers, F.; Eck, D. Learning Nonregular Languages: A Comparison of Simple Recurrent Networks and LSTM. Neural Comput. 2014, 14, 2039–2041. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Waterlogging Point | Maximum Ponding Depth, Measured Values (cm) | Maximum Ponding Depth, Simulation Results (cm) | Error (%) |
|---|---|---|---|---|
| 1 | Point A | 40 | 39.8 | 0.50 |
| 2 | Point B | 50 | 47 | 6.00 |
| 3 | Point C | 30 | 29.3 | 2.33 |
| 4 | Point D | 25 | 24.2 | 3.20 |
| 5 | Point E | 40 | 42.9 | 7.25 |
| 6 | Point F | 48 | 46.9 | 2.29 |
| 7 | Point G | 55 | 56.1 | 2.00 |
| 8 | Point H | 35 | 34.9 | 0.29 |
| 9 | Point I | 55 | 54.5 | 0.91 |
| 10 | Point J | 50 | 49.7 | 0.60 |
| 11 | Point K | 15 | 14.8 | 1.33 |
| 12 | Point L | 20 | 18.9 | 5.50 |
| Average error | 2.68 |
| Serial Number | Waterlogging Point | Measured Values (cm) | Numerical Model Results (cm) | Error with Numerical Model (%) | LSTM Results (cm) | Error with LSTM (%) |
|---|---|---|---|---|---|---|
| 1 | Point A | 40 | 39.8 | 0.50 | 39.2 | 2.00 |
| 2 | Point B | 50 | 47 | 6.00 | 51.2 | 2.40 |
| 3 | Point C | 30 | 29.3 | 2.33 | 28.3 | 5.67 |
| 4 | Point D | 25 | 24.2 | 3.20 | 23.5 | 6.00 |
| 5 | Point E | 40 | 42.9 | 7.25 | 41.2 | 3.00 |
| 6 | Point F | 48 | 46.9 | 2.29 | 46.9 | 2.29 |
| 7 | Point G | 55 | 56.1 | 2.00 | 56.1 | 2.00 |
| 8 | Point H | 35 | 34.9 | 0.29 | 35.7 | 2.00 |
| 9 | Point I | 55 | 54.5 | 0.91 | 55.2 | 0.36 |
| 10 | Point J | 50 | 49.7 | 0.60 | 50.7 | 1.40 |
| 11 | Point K | 15 | 14.8 | 1.33 | 15.9 | 6.00 |
| 12 | Point L | 20 | 18.9 | 5.50 | 19.3 | 3.50 |
| Average error | 2.68 | 3.05 | ||||
| Standard deviations of errors | 2.25 | 1.80 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Liu, Y.; Zheng, J.; Chai, F.; Ren, H. Intelligent Prediction Method for Waterlogging Risk Based on AI and Numerical Model. Water 2022, 14, 2282. https://doi.org/10.3390/w14152282
Liu Y, Liu Y, Zheng J, Chai F, Ren H. Intelligent Prediction Method for Waterlogging Risk Based on AI and Numerical Model. Water. 2022; 14(15):2282. https://doi.org/10.3390/w14152282
Chicago/Turabian StyleLiu, Yuanyuan, Yesen Liu, Jingwei Zheng, Fuxin Chai, and Hancheng Ren. 2022. "Intelligent Prediction Method for Waterlogging Risk Based on AI and Numerical Model" Water 14, no. 15: 2282. https://doi.org/10.3390/w14152282
APA StyleLiu, Y., Liu, Y., Zheng, J., Chai, F., & Ren, H. (2022). Intelligent Prediction Method for Waterlogging Risk Based on AI and Numerical Model. Water, 14(15), 2282. https://doi.org/10.3390/w14152282