



Large-Scale Extraction and Mapping of Small Surface Water Bodies Based on Very High-Spatial-Resolution Satellite Images: A Case Study in Beijing, China


Abstract
:1. Introduction
2. Materials and Methods
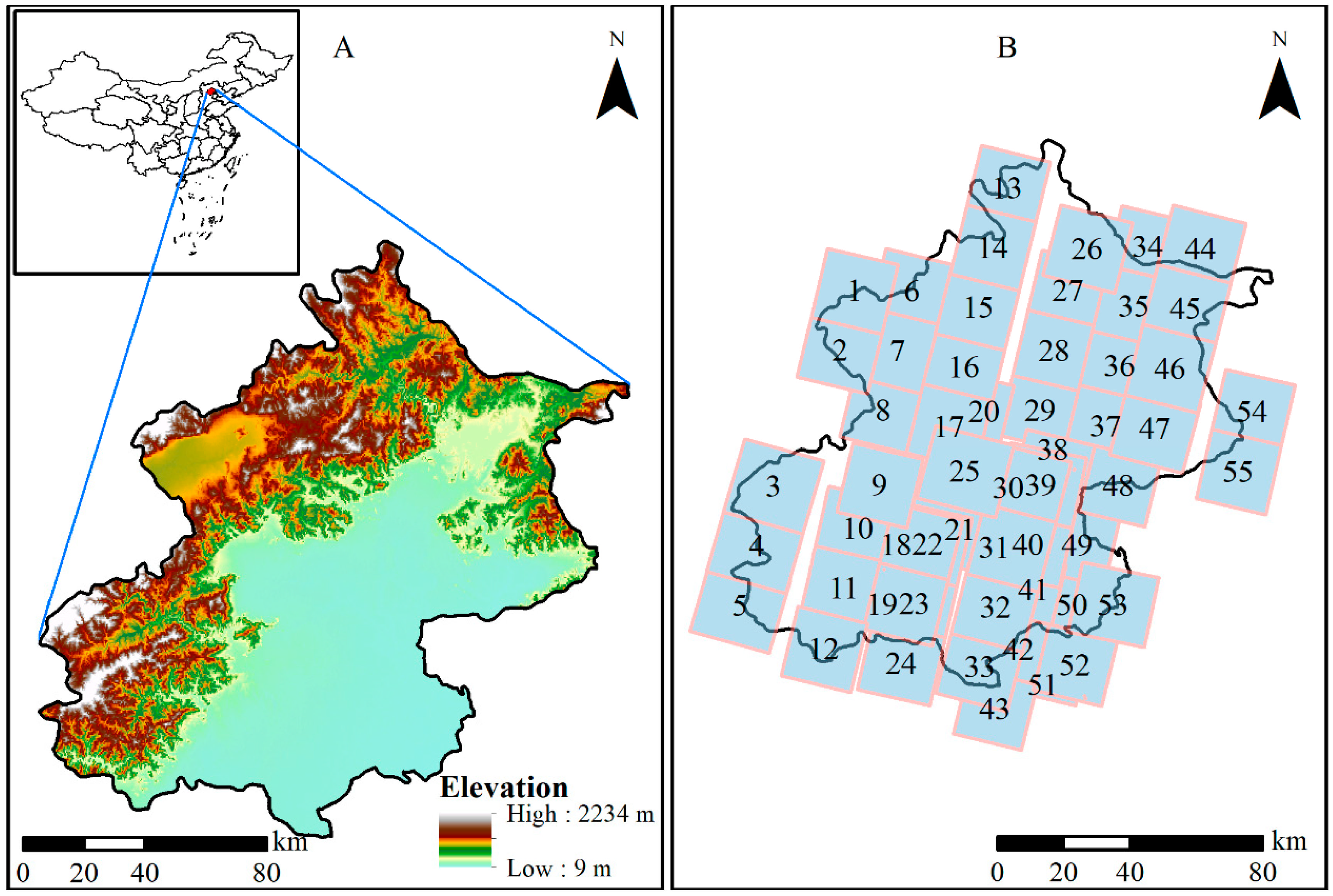
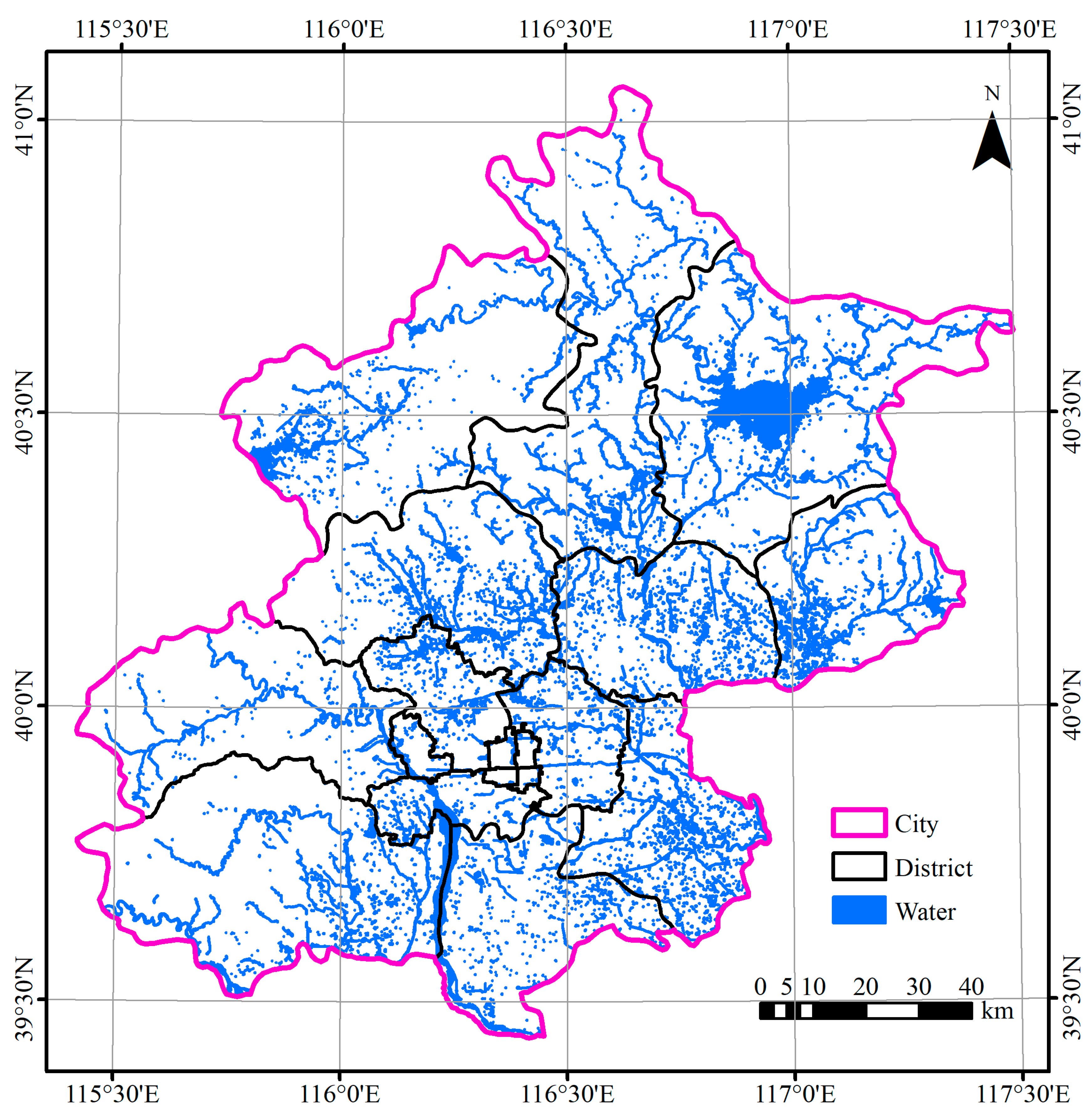
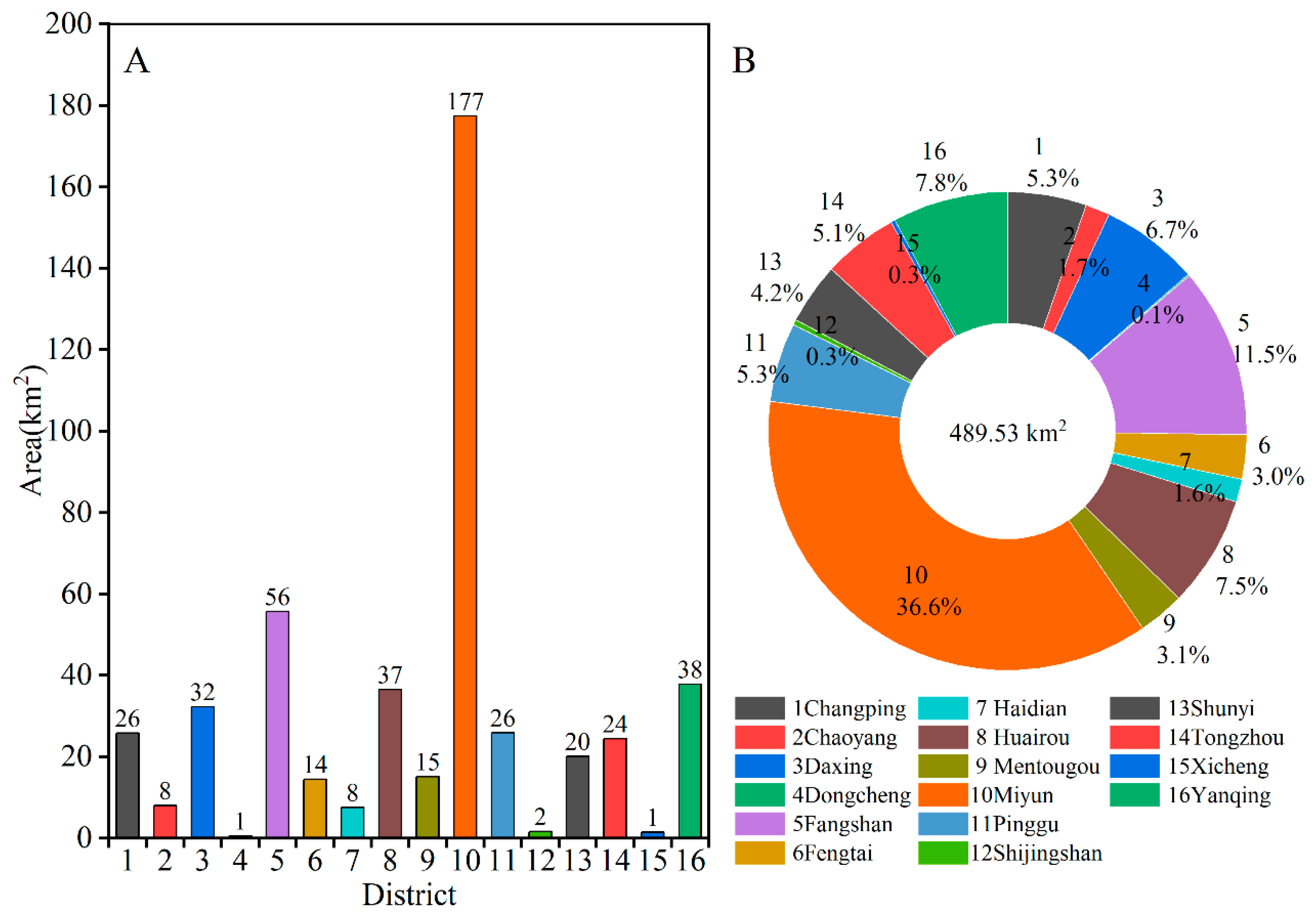
2.1. Study Site
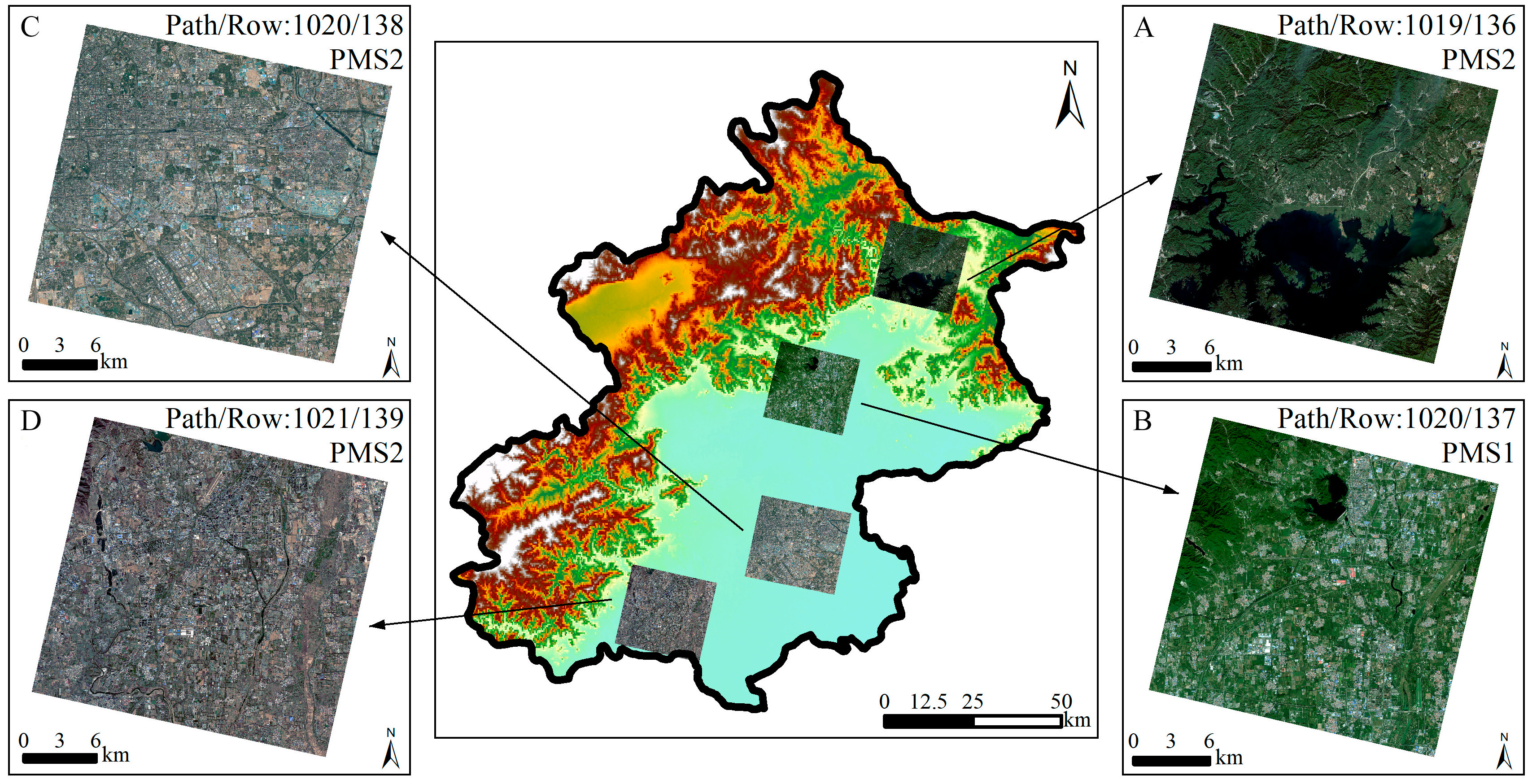
2.2. Very High-Resolution Image and Preprocessing
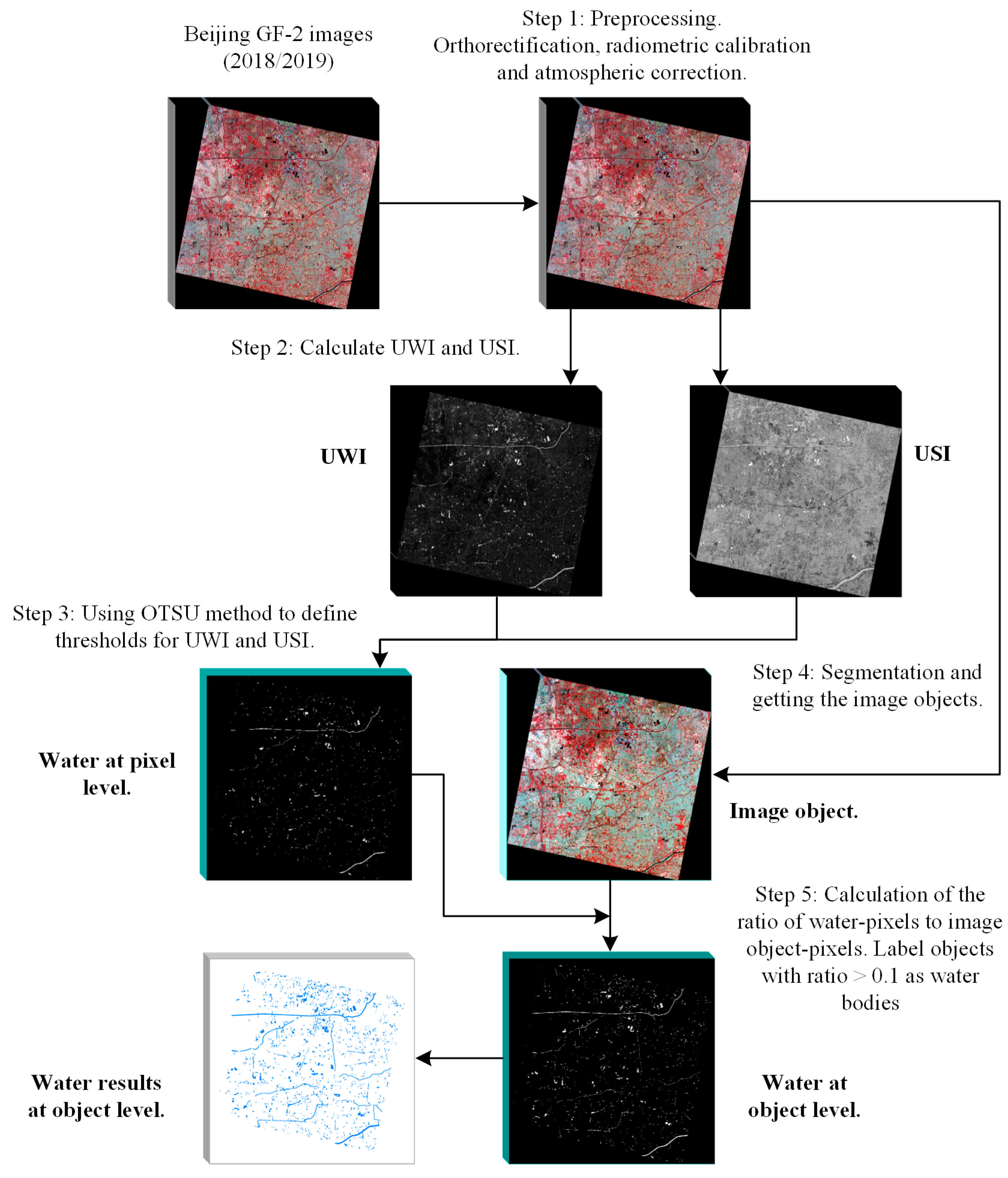
2.3. Water Extraction Workflow
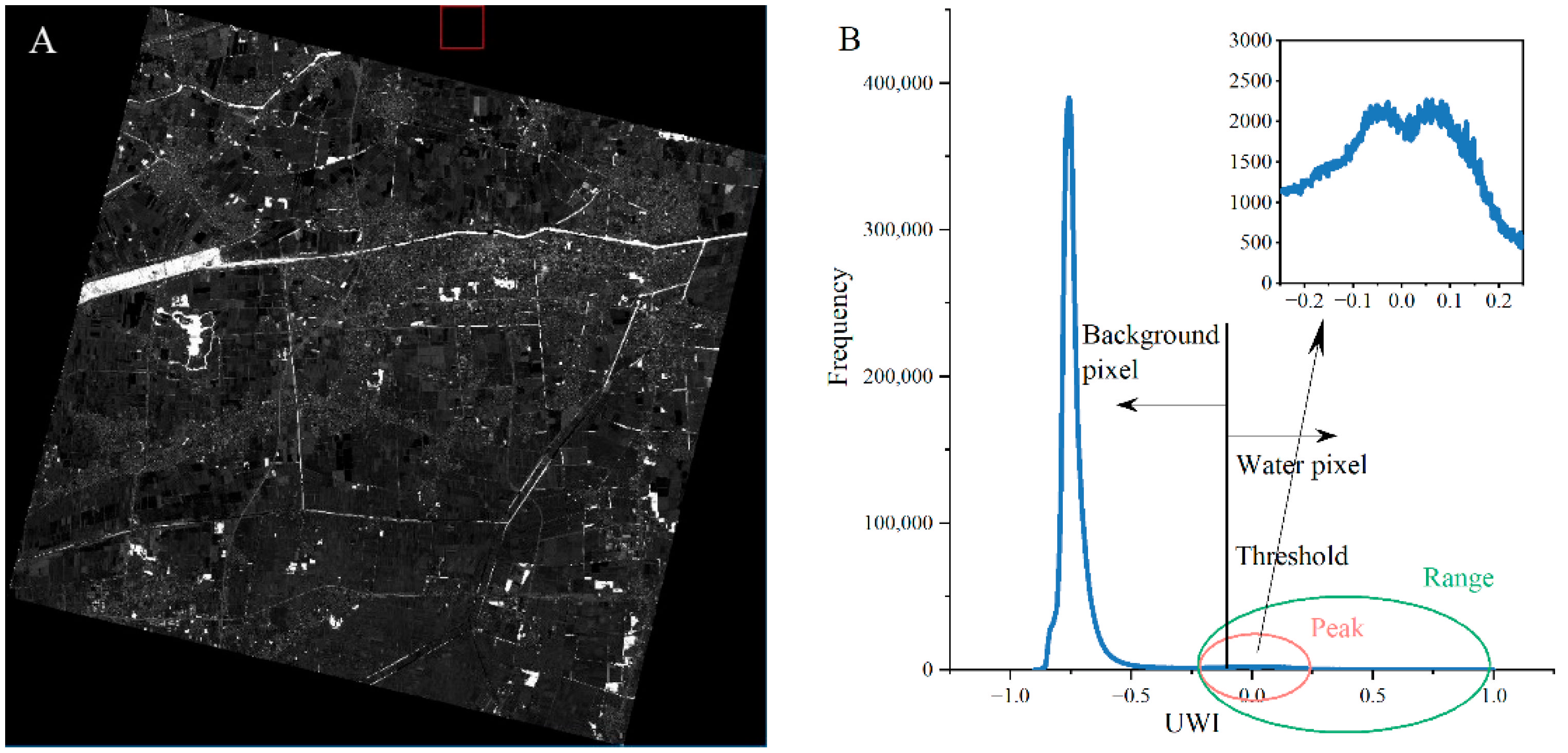
2.3.1. Spectral Water Index
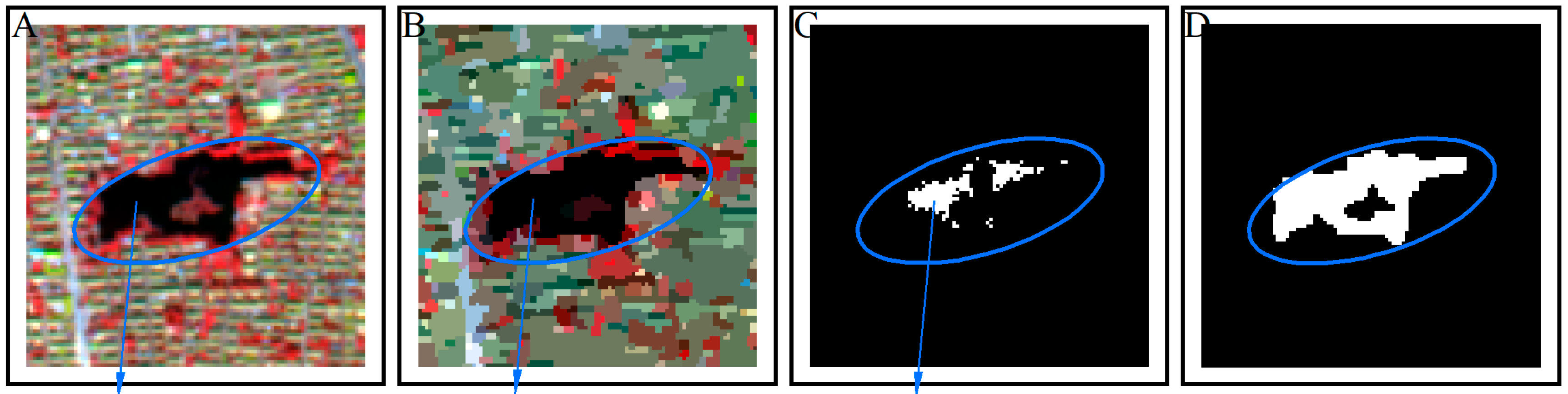
2.3.2. Object Detection
2.3.3. Combination of Pixel-Based Water Index and Image Object
2.4. Post-Classification Improvement
2.5. Accuracy Assessment
3. Results
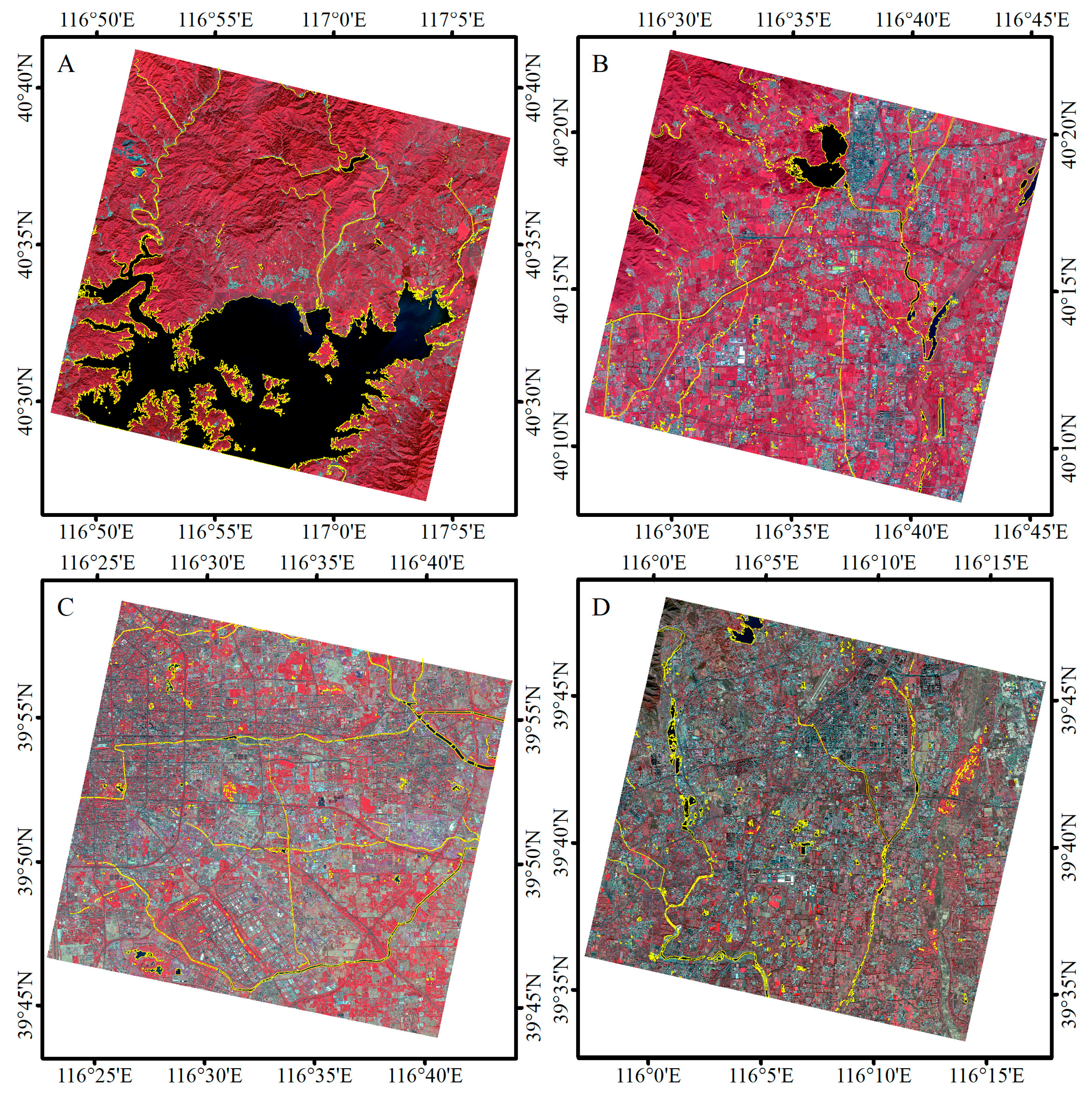
3.1. Water Mapping and Accuracy
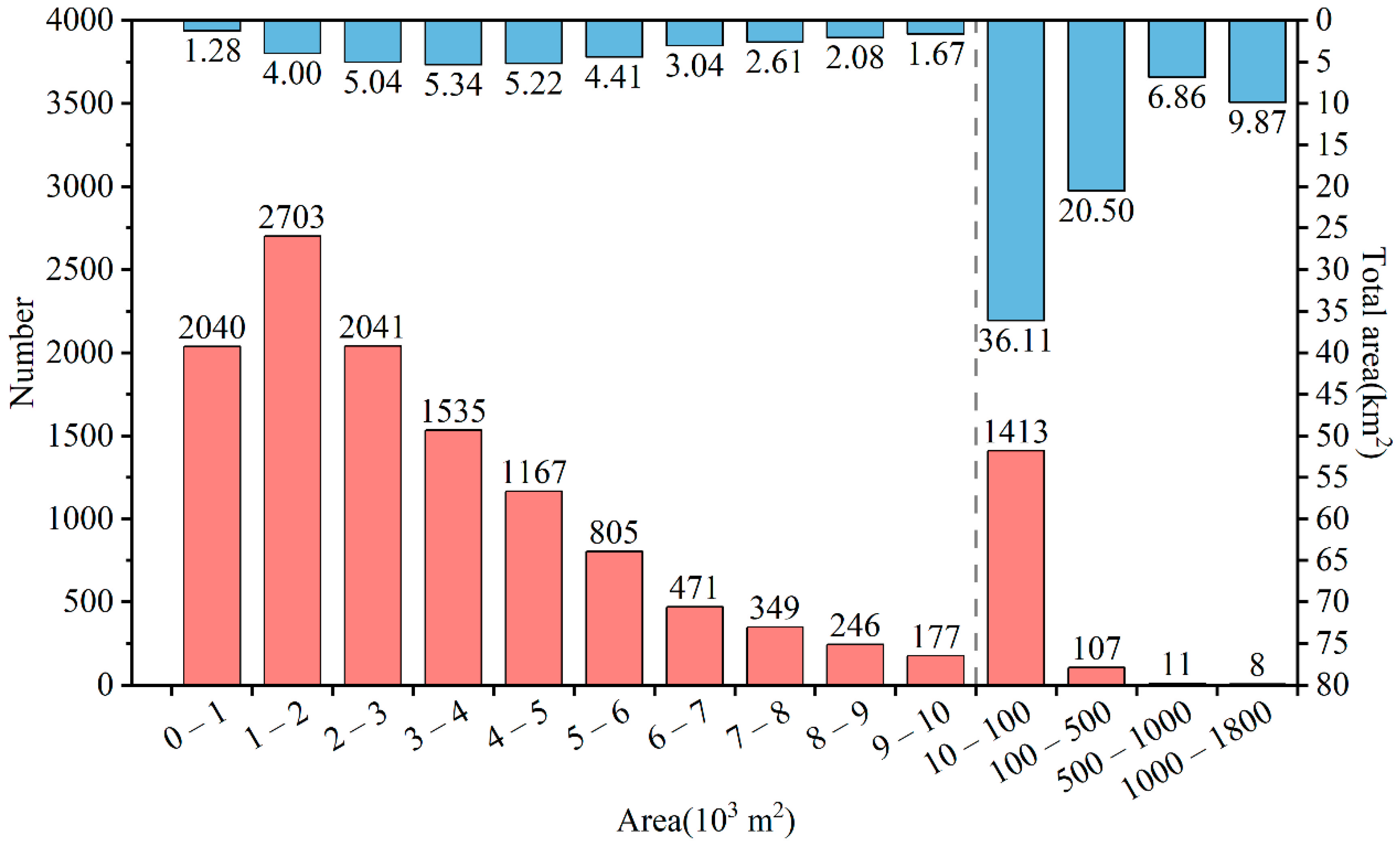
3.2. Pond Body Statistics
4. Discussion
4.1. Contributions of This Study
4.2. Assessment of the Method’s Pipeline
4.2.1. Pixel-Object Combination
4.2.2. Batch Processing
4.3. Post-Classification Improvement
4.4. Limitations and Improvements
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Loveland, T.R.; Reed, B.C.; Brown, J.F.; Ohlen, D.O.; Zhu, Z.; Yang, L.; Merchant, J.W. Development of a global land cover characteristics database and IGBP DISCover from 1 km AVHRR data. Int. J. Remote Sens. 2000, 21, 1303–1330. [Google Scholar] [CrossRef]
- Liao, A.P.; Chen, L.J.; Chen, J.; Chaoying, H.E.; Cao, X.; Chen, J.; Peng, S. High-resolution remote sensing mapping of global land water. Sci. China Earth Sci. 2014, 57, 2305–2316. [Google Scholar] [CrossRef]
- Fritz, S.; Bartholomé, E.; Belward, A.; Hartley, A.; Defourny, P. Harmonisation, Mosaicing and Production of the Global Land Cover 2000 Database (Beta Version); EC-JRC: Ispra, Italy, 2003. [Google Scholar]
- Friedl, M.A.; Mciver, D.K.; Hodges, J.C.F.; Zhang, X.Y.; Muchoney, D.; Strahler, A.H.; Woodcock, C.E.; Gopal, S.; Schneider, A.; Cooper, A.; et al. Global land cover mapping from MODIS: Algorithms and early results. Remote Sens. Environ. 2002, 83, 287–302. [Google Scholar] [CrossRef]
- Hansen, M.C.; Defries, R.S.; Townshend, J.R.G.; Sohlberg, R.A. Global land cover classification at 1 km spatial resolution using a classification tree approach. Int. J. Remote Sens. 2000, 21, 1331–1364. [Google Scholar] [CrossRef]
- Yao, F.; Wang, J.; Wang, C.; Cretaux, J. Constructing long-term high-frequency time series of global lake and reservoir areas using Landsat imagery. Remote Sens. Environ. 2019, 232, 111210. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Chen, Y.; Niu, Z.; Johnston, C.A.; Hu, S. A Unifying Approach to Classifying Wetlands in the Ontonagon River Basin, Michigan, Using Multi-temporal Landsat-8 OLI Imagery. Can. J. Remote Sens. 2018, 44, 373–389. [Google Scholar] [CrossRef]
- Zhou, Y.; Dong, J.; Xiao, X.; Liu, R.; Zou, Z.; Zhao, G.; Ge, Q. Continuous monitoring of lake dynamics on the Mongolian Plateau using all available Landsat imagery and Google Earth Engine. Sci. Total Environ. 2019, 689, 366–380. [Google Scholar] [CrossRef] [PubMed]
- Prasad, K.A.; Ottinger, M.; Wei, C.; Leinenkugel, P. Assessment of Coastal Aquaculture for India from Sentinel-1 SAR Time Series. Remote Sens. 2019, 11, 357. [Google Scholar] [CrossRef]
- Li, Y.; Niu, Z.; Xu, Z.; Yan, X. Construction of High Spatial-Temporal Water Body Dataset in China Based on Sentinel-1 Archives and GEE. Remote Sens. 2020, 12, 2413. [Google Scholar] [CrossRef]
- Wieland, M.; Martinis, S. Large-scale surface water change observed by Sentinel-2 during the 2018 drought in Germany. Int. J. Remote Sens. 2020, 41, 4740–4754. [Google Scholar] [CrossRef]
- Jia, M.; Wang, Z.; Mao, D.; Ren, C.; Wang, C.; Wang, Y. Rapid, robust, and automated mapping of tidal flats in China using time series Sentinel-2 images and Google Earth Engine. Remote Sens. Environ. 2021, 255, 112285. [Google Scholar] [CrossRef]
- Jiang, W.; He, G.; Pang, Z.; Guo, H.; Long, T.; Ni, Y. Surface water map of China for 2015 (SWMC-2015) derived from Landsat 8 satellite imagery. Remote Sens. Lett. 2020, 11, 265–273. [Google Scholar] [CrossRef]
- Wang, X.; Xiao, X.; Zou, Z.; Hou, L.; Qin, Y.; Dong, J.; Doughty, R.B.; Chen, B.; Zhang, X.; Chen, Y.; et al. Mapping coastal wetlands of China using time series Landsat images in 2018 and Google Earth Engine. ISPRS J. Photogramm. Remote Sens. 2020, 163, 312–326. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Ma, J.; Xiao, X.; Wang, X.; Dai, S.; Zhao, B. Long-Term Dynamic of Poyang Lake Surface Water: A Mapping Work Based on the Google Earth Engine Cloud Platform. Remote Sens. 2019, 11, 313. [Google Scholar] [CrossRef]
- Xia, H.; Zhao, J.; Qin, Y.; Yang, J.; Cui, Y.; Song, H.; Ma, L.; Jin, N.; Meng, Q. Changes in Water Surface Area during 1989–2017 in the Huai River Basin using Landsat Data and Google Earth Engine. Remote Sens. 2019, 11, 1824. [Google Scholar] [CrossRef]
- Khandelwal, A.; Karpatne, A.; Marlier, M.E.; Kim, J.; Lettenmaier, D.P.; Kumar, V. An approach for global monitoring of surface water extent variations in reservoirs using MODIS data. Remote Sens. Environ. 2017, 202, 113–128. [Google Scholar] [CrossRef]
- Li, D.; Wu, B.; Chen, B.; Qin, C.; Wang, Y.; Zhang, Y.; Xue, Y. Open-Surface River Extraction Based on Sentinel-2 MSI Imagery and DEM Data: Case Study of the Upper Yellow River. Remote Sens. 2020, 12, 2737. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Homayouni, S.; Gill, E. The first wetland inventory map of newfoundland at a spatial resolution of 10 m using sentinel-1 and sentinel-2 data on the google earth engine cloud computing platform. Remote Sens. 2019, 11, 43. [Google Scholar] [CrossRef]
- Ren, H.; Xu, D.; Shi, X.; Xu, J.; Zhuang, D.; Yang, G. Characterisation of gastric cancer and its relation to environmental factors: A case study in Shenqiu County, China. Int. J. Environ. Health Res. 2016, 26, 1–10. [Google Scholar] [CrossRef]
- Oertli, B.; Biggs, J.; Cereghino, R.; Grillas, P.; Joly, P.; Lachavanne, J.B. Conservation and monitoring of pond biodiversity: Introduction. Aquat. Conserv. Mar. Freshw. Ecosyst. 2005, 15, 535–540. [Google Scholar] [CrossRef]
- Chen, W.; He, B.; Nover, D.; Lu, H.; Liu, J.; Sun, W.; Chen, W. Farm ponds in southern China: Challenges and solutions for conserving a neglected wetland ecosystem. Sci. Total Environ. 2019, 659, 1322–1334. [Google Scholar] [CrossRef]
- Verpoorter, C.; Kutser, T.; Tranvik, L. Automated Mapping of Water Bodies Using Landsat Multispectral Data. Limnol. Oceanogr. Methods 2012, 10, 1037–1050. [Google Scholar] [CrossRef]
- Wu, W.; Li, Q.; Zhang, Y.; Du, X.; Wang, H. Two-Step Urban Water Index (TSUWI): A New Technique for High-Resolution Mapping of Urban Surface Water. Remote Sens. 2018, 10, 1704. [Google Scholar] [CrossRef]
- Yao, F.; Wang, C.; Dong, D.; Luo, J.; Shen, Z.; Yang, K. High-Resolution Mapping of Urban Surface Water Using ZY-3 Multi-Spectral Imagery. Remote Sens. 2015, 7, 12336–12355. [Google Scholar] [CrossRef]
- Cheng, B.; Liang, C.; Liu, X.; Liu, Y.; Ma, X.; Wang, G. Research on a novel extraction method using Deep Learning based on GF-2 images for aquaculture areas. Int. J. Remote Sens. 2020, 41, 3575–3591. [Google Scholar] [CrossRef]
- Ludwig, C.; Walli, A.; Schleicher, C.; Weichselbaum, J.; Riffler, M. A highly automated algorithm for wetland detection using multi-temporal optical satellite data. Remote Sens. Environ. 2019, 224, 333–351. [Google Scholar] [CrossRef]
- Wang, L.; Li, Y.; Zhang, D.; Liu, Z. Extraction of Aquaculture Pond Region in Coastal Waters of Southeast China Based on Spectral Features and Spatial Convolution. Water 2022, 14, 2089. [Google Scholar] [CrossRef]
- McCarthy, M.J.; Radabaugh, K.R.; Moyer, R.P.; Muller-Karger, F.E. Enabling efficient, large-scale high-spatial resolution wetland mapping using satellites. Remote Sens. Environ. 2018, 208, 189–201. [Google Scholar] [CrossRef]
- Hong, S.; Wang, H.; Cheng, T. Circulation Characteristic Analysis of Implied Water Flow Based on a Complex Network: A Case Study for Beijing, China. Water 2018, 10, 834. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.; Feng, M.; Zhu, Y.; Lu, N.; Huang, J.; Xiao, T. An automated method for extracting rivers and lakes from Landsat imagery. Remote Sens. 2014, 6, 5067–5089. [Google Scholar] [CrossRef]
- Xie, H.; Xin, L.; Xiong, X.; Tong, X.; Zhou, B. New hyperspectral difference water index for the extraction of urban water bodies by the use of airborne hyperspectral images. J. Appl. Remote Sens. 2014, 8, 085098. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Dai, C.; Howat, I.M.; Larour, E.; Husby, E. Coastline extraction from repeat high resolution satellite imagery. Remote Sens. Environ. 2019, 229, 260–270. [Google Scholar] [CrossRef]
- Jiang, M.; Tian, S.; Zheng, Z.; Zhan, Q.; He, Y. Human activity influences on vegetation cover changes in Beijing, China, from 2000 to 2015. Remote Sens. 2017, 9, 271. [Google Scholar] [CrossRef]
- Virdis, S.G.P. An object-based image analysis approach for aquaculture ponds precise mapping and monitoring: A case study of Tam Giang-Cau Hai Lagoon, Vietnam. Environ. Monit. Assess. 2014, 186, 117–133. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Yang, X.; Hu, S.; Su, F. Extraction of Coastline in Aquaculture Coast from Multispectral Remote Sensing Images: Object-Based Region Growing Integrating Edge Detection. Remote Sens. 2013, 5, 4470–4487. [Google Scholar] [CrossRef]
- Wang, H.-F.; Zhai, L.; Huang, H.; Guan, L.-M.; Mu, K.-N.; Wang, G.-P. Measurement for cracks at the bottom of bridges based on tethered creeping unmanned aerial vehicle. Autom. Constr. 2020, 119, 103330. [Google Scholar] [CrossRef]
- Otsu, N. Threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Huang, W.; DeVries, B.; Huang, C.; Lang, M.W.; Jones, J.W.; Creed, I.F.; Carroll, M.L. Automated Extraction of Surface Water Extent from Sentinel-1 Data. Remote Sens. 2018, 10, 797. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Xie, C.; Fang, X.; Zhang, L. Combining pixel-and object-based machine learning for identification of water-body types from urban high-resolution remote-sensing imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2097–2110. [Google Scholar] [CrossRef]
- Chen, Y.; Fan, R.; Yang, X.; Wang, J.; Aamir, L. Extraction of Urban Water Bodies from High-Resolution Remote-Sensing Imagery Using Deep Learning. Water 2018, 10, 585. [Google Scholar] [CrossRef]
- Yang, X.; Shanshan, Z.; Xuebin, Q.; Na, Z.; Ligang, L. Mapping of Urban Surface Water Bodies from Sentinel-2 MSI Imagery at 10 m Resolution via NDWI-Based Image Sharpening. Remote Sens. 2017, 9, 596. [Google Scholar] [CrossRef]
- Xie, H.; Luo, X.; Xu, X.; Pan, H.; Tong, X. Automated Subpixel Surface Water Mapping from Heterogeneous Urban Environments Using Landsat 8 OLI Imagery. Remote Sens. 2016, 8, 584. [Google Scholar] [CrossRef]
- Xu, X.; Xu, S.; Jin, L.; Song, E. Characteristic analysis of Otsu threshold and its applications. Pattern Recognit. Lett. 2011, 32, 956–961. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Time | Water Types | Major Shadow | ID | Time | Water Types | Major Shadow | ID | Time | Water Types | Major Shadow |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 25 April 2018 | - | - | 21 | 31 August 2018 | River Pond | Building | 41 | 10 September 2018 | River Pond Ditch | Building Street Tree |
| 2 | 25 April 2018 | Reservoir | Hill | 22 | 29 October 2018 | River Pond | Building | 42 | 10 September 2018 | River Pond | Street Tree |
| 3 | 16 April 2018 | River | Hill | 23 | 29 October 2018 | River Pond | Building Street Tree | 43 | 10 September 2018 | River Pond | Building Street Tree |
| 4 | 16 April 2018 | River | Hill | 24 | 29 October 2018 | River | Building Street Tree | 44 | 18 November 2019 | River | Hill |
| 5 | 16 April 2018 | River | Hill | 25 | 29 October 2018 | River Pond | Building | 45 | 18 November 2019 | Reservoir River | Hill |
| 6 | 1 March 2018 | Reservoir | Hill | 26 | 22 March 2018 | River | Hill | 46 | 18 November 2019 | - | - |
| 7 | 1 March 2018 | River | Hill | 27 | 5 September 2018 | River | Hill | 47 | 18 November 2019 | River Pond | Building Hill |
| 8 | 1 March 2018 | River | Hill | 28 | 5 September 2018 | River Pond | Hill | 48 | 10 September 2018 | River Pond | Building Street Tree |
| 9 | 25 April 2018 | River | Hill | 29 | 5 September 2018 | Reservoir River Pond | Building | 49 | 5 September 2018 | River Pond Ditch | Building Tree |
| 10 | 29 October 2018 | River | Hill | 30 | 22 March 2018 | River Pond | Building | 50 | 5 September 2018 | River Pond Ditch | Building Tree |
| 11 | 29 October 2018 | River | Hill | 31 | 22 March 2018 | River Pond | Building | 51 | 5 September 2018 | River Pond Ditch | Building Tree |
| 12 | 18 June 2019 | River Pond | - | 32 | 22 March 2018 | River Pond Ditch | Building | 52 | 10 September 2018 | River Pond Ditch | Building Tree |
| 13 | 18 June 2019 | River | Hill | 33 | 22 March 2018 | River Pond Ditch | Building | 53 | 9 October 2018 | River Pond Ditch | Building Tree |
| 14 | 18 June 2019 | River | Hill | 34 | 5 September 2018 | River | Hill | 54 | 29 May 2019 | Reservoir River | Hill |
| 15 | 18 June 2019 | - | - | 35 | 5 September 2018 | Reservoir River | Hill | 55 | 29 May 2019 | Reservoir River | Hill |
| 16 | 18 June 2019 | River | Hill | 36 | 5 September 2018 | Reservoir River Pond | Hill Building | ||||
| 17 | 18 June 2019 | River Pond | Building | 37 | 5 September 2018 | River Pond | Hill Tree | ||||
| 18 | 18 June 2019 | River Pond | Building | 38 | 10 September 2018 | River Pond | Building | ||||
| 19 | 18 June 2019 | River Pond | Building | 39 | 9 May 2019 | River Pond | Building | ||||
| 20 | 16 August 2019 | River Pond | Building | 40 | 9 May 2019 | River Pond | Building Tree |
| Processing | Testing Images | Reference Points (Water) | Accuracy | ||||
|---|---|---|---|---|---|---|---|
| Ground Truth | Extraction Results | KC | OA (%) | PA (%) | UA (%) | ||
| Before post-classification | Image A | 246 | 238 | 0.976 | 99.1 | 96.7 | 99.6 |
| Image B | 43 | 38 | 0.912 | 99.3 | 88.4 | 95.0 | |
| Image C | 17 | 12 | 0.701 | 99.0 | 70.6 | 70.6 | |
| Image D | 17 | 13 | 0.784 | 99.3 | 76.5 | 81.3 | |
| After post-classification | Image A | 246 | 244 | 0.995 | 99.8 | 99.2 | 100.0 |
| Image B | 43 | 42 | 0.988 | 99.9 | 97.7 | 100.0 | |
| Image C | 17 | 15 | 0.936 | 99.8 | 88.2 | 100.0 | |
| Image D | 17 | 16 | 0.940 | 99.8 | 94.1 | 94.1 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, Z.; Zhu, Y.; Pan, Y.; Zhu, X.; Zheng, X. Large-Scale Extraction and Mapping of Small Surface Water Bodies Based on Very High-Spatial-Resolution Satellite Images: A Case Study in Beijing, China. Water 2022, 14, 2889. https://doi.org/10.3390/w14182889
Ji Z, Zhu Y, Pan Y, Zhu X, Zheng X. Large-Scale Extraction and Mapping of Small Surface Water Bodies Based on Very High-Spatial-Resolution Satellite Images: A Case Study in Beijing, China. Water. 2022; 14(18):2889. https://doi.org/10.3390/w14182889
Chicago/Turabian StyleJi, Zhonglin, Yu Zhu, Yaozhong Pan, Xiufang Zhu, and Xuechang Zheng. 2022. "Large-Scale Extraction and Mapping of Small Surface Water Bodies Based on Very High-Spatial-Resolution Satellite Images: A Case Study in Beijing, China" Water 14, no. 18: 2889. https://doi.org/10.3390/w14182889
APA StyleJi, Z., Zhu, Y., Pan, Y., Zhu, X., & Zheng, X. (2022). Large-Scale Extraction and Mapping of Small Surface Water Bodies Based on Very High-Spatial-Resolution Satellite Images: A Case Study in Beijing, China. Water, 14(18), 2889. https://doi.org/10.3390/w14182889