

Unsupervised Representation Learning of GRACE Improves Groundwater Predictions


Abstract
:1. Introduction
2. Materials and Methods
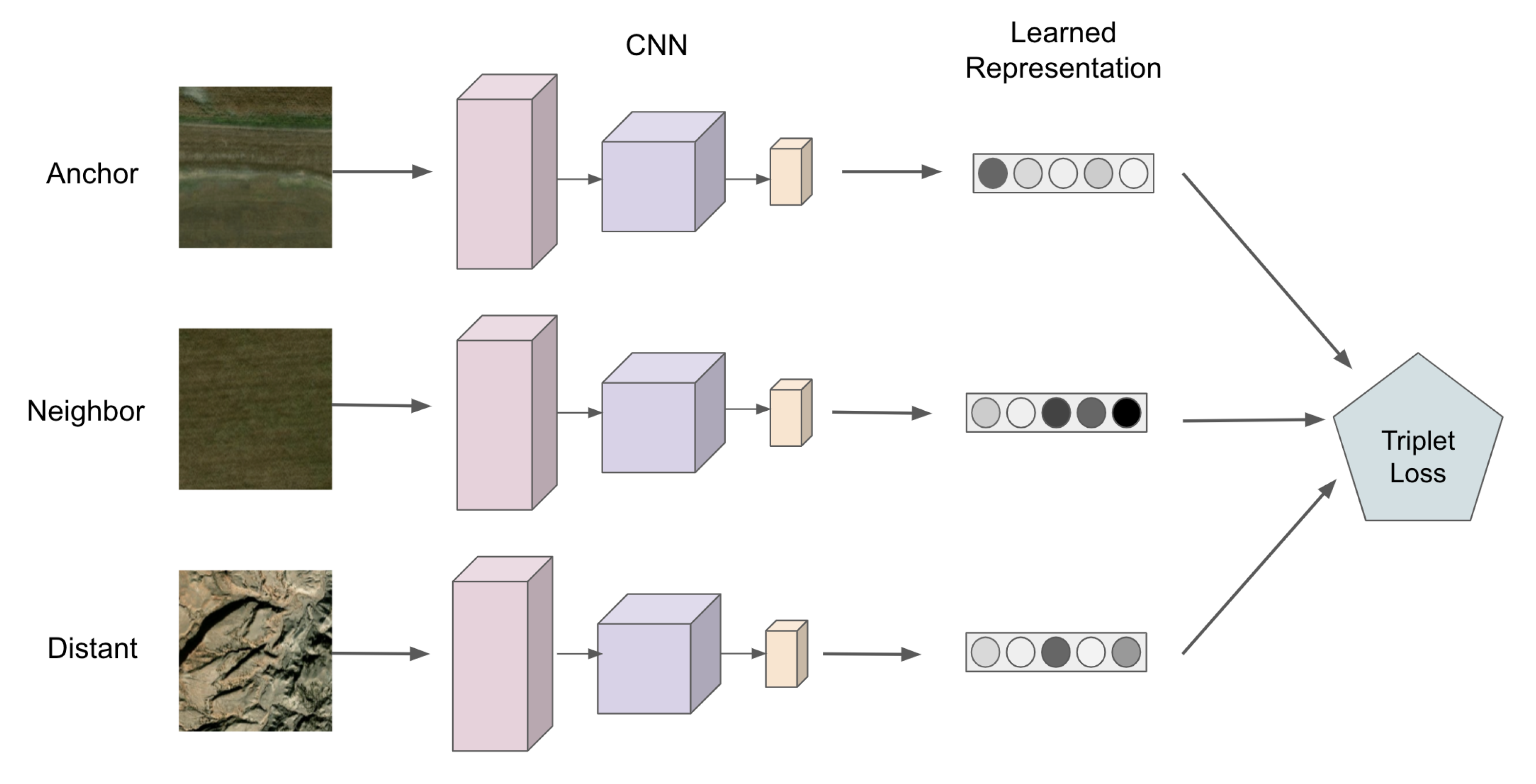
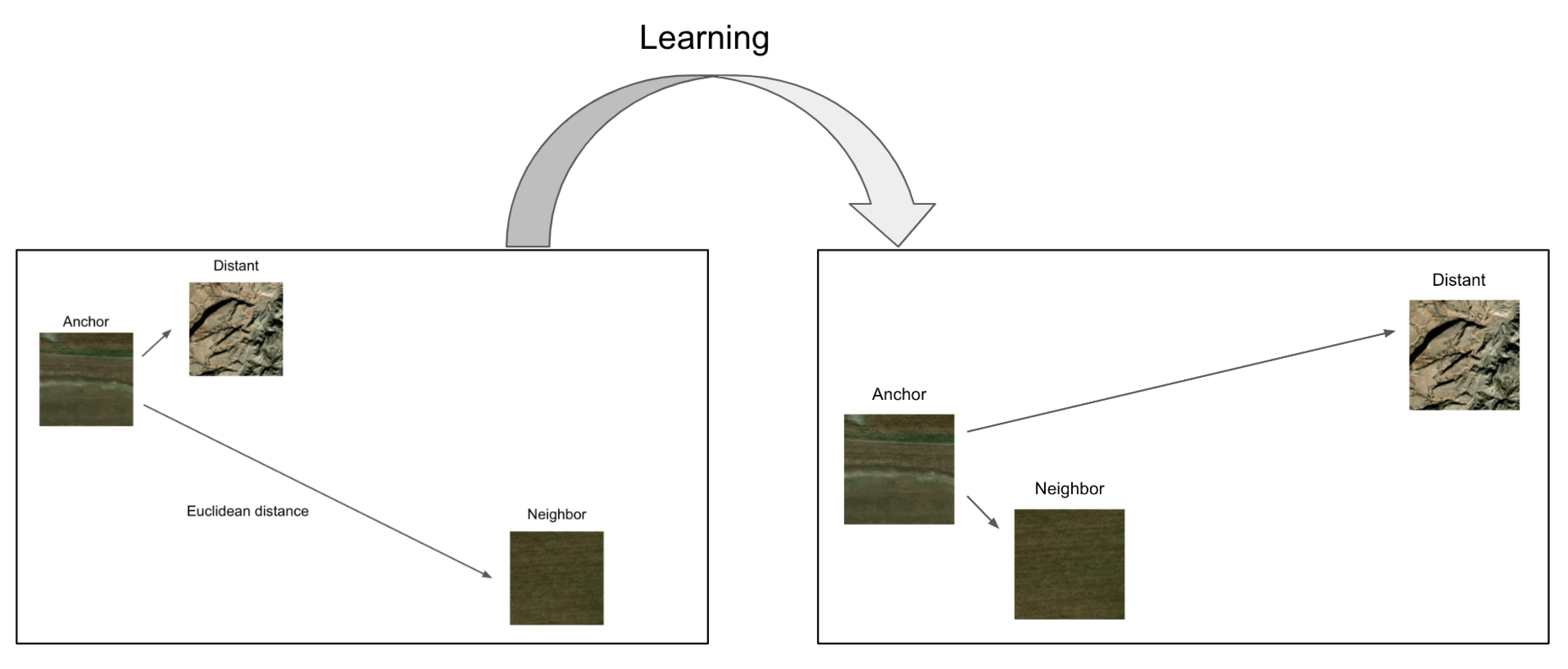
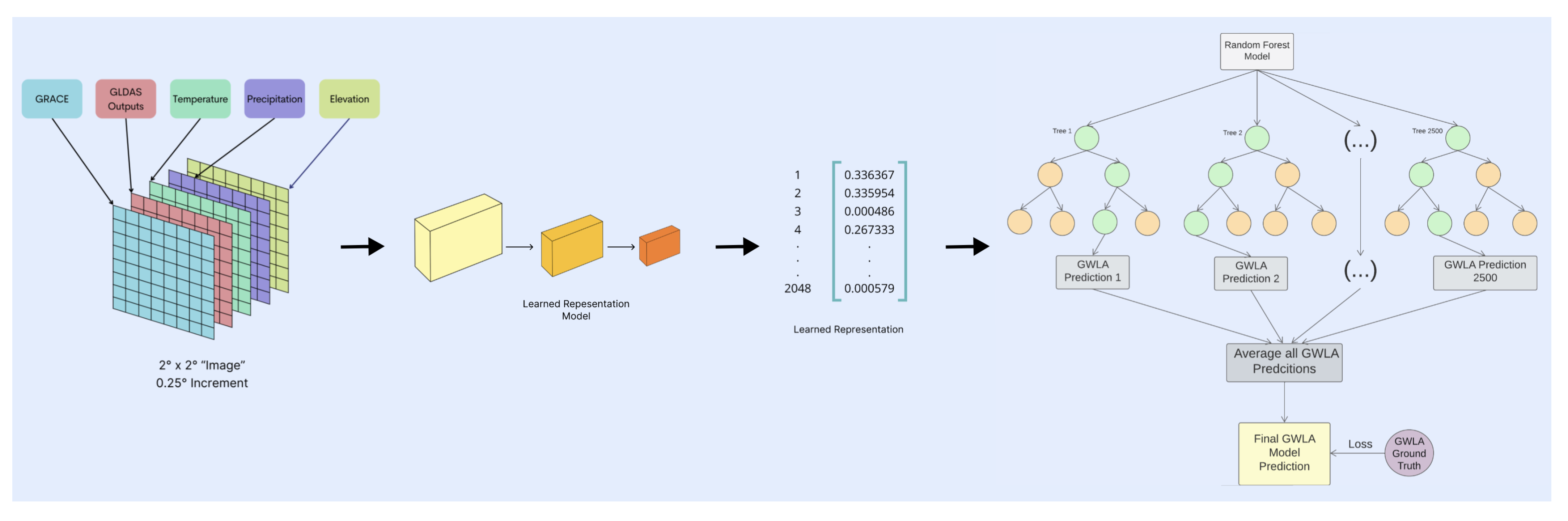
2.1. Model Framework
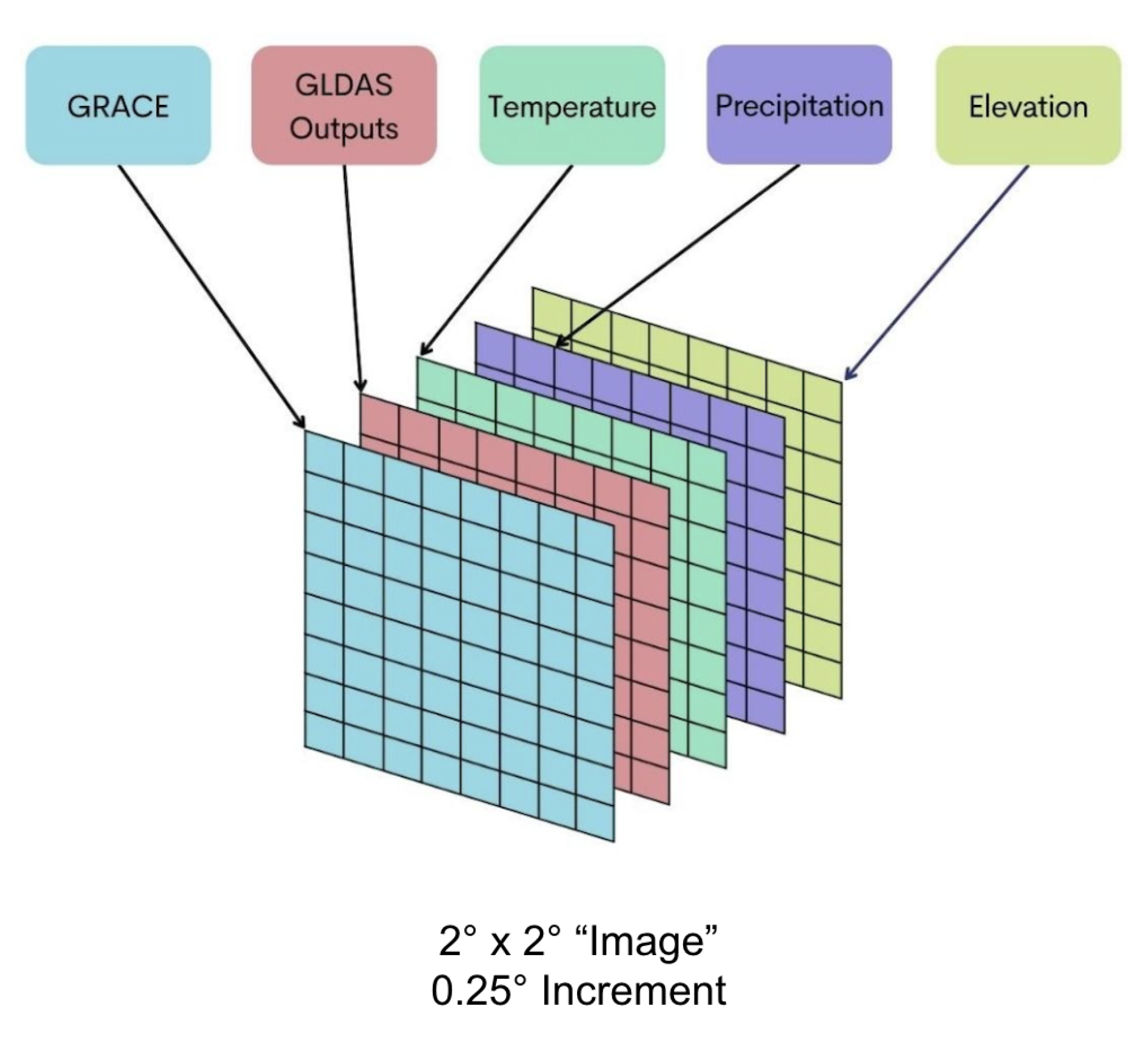
2.2. Model Inputs
2.2.1. GRACE TWS
2.2.2. Precipitation
2.2.3. Temperature
2.2.4. GLDAS Outputs
2.2.5. GLDAS Elevation
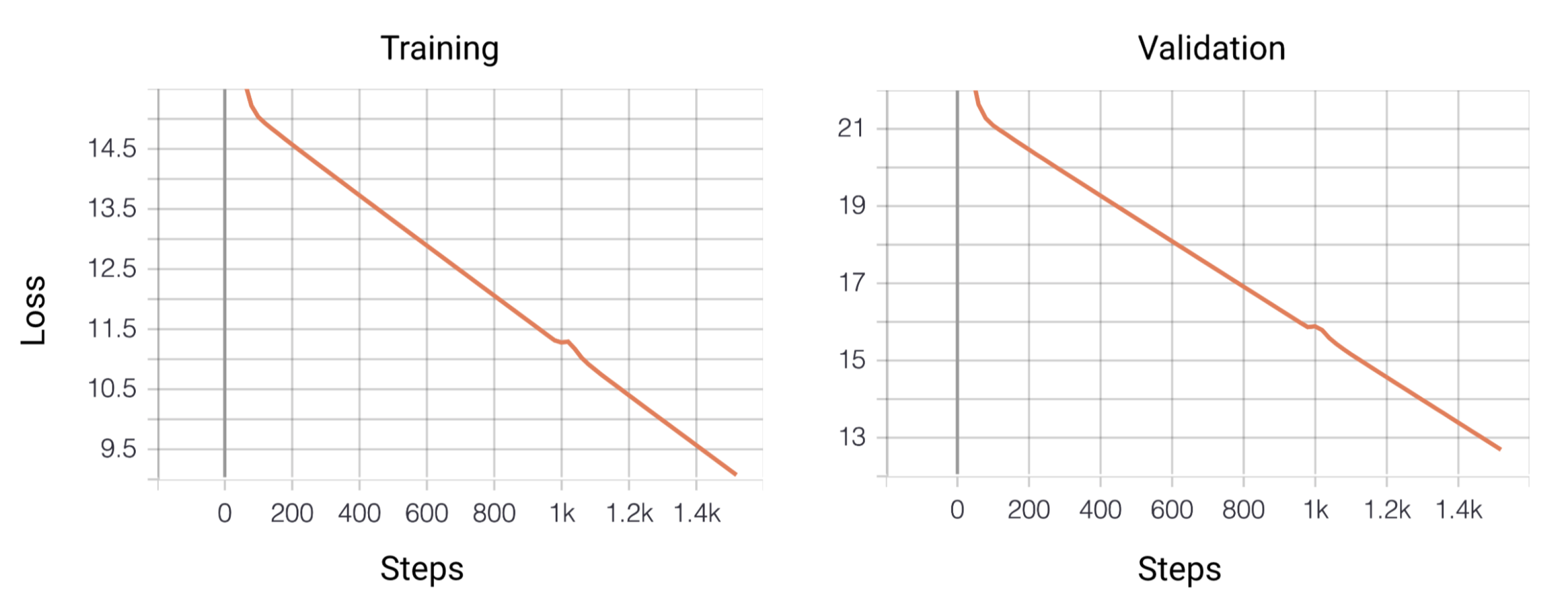
2.3. Model Training
3. Model Evaluation
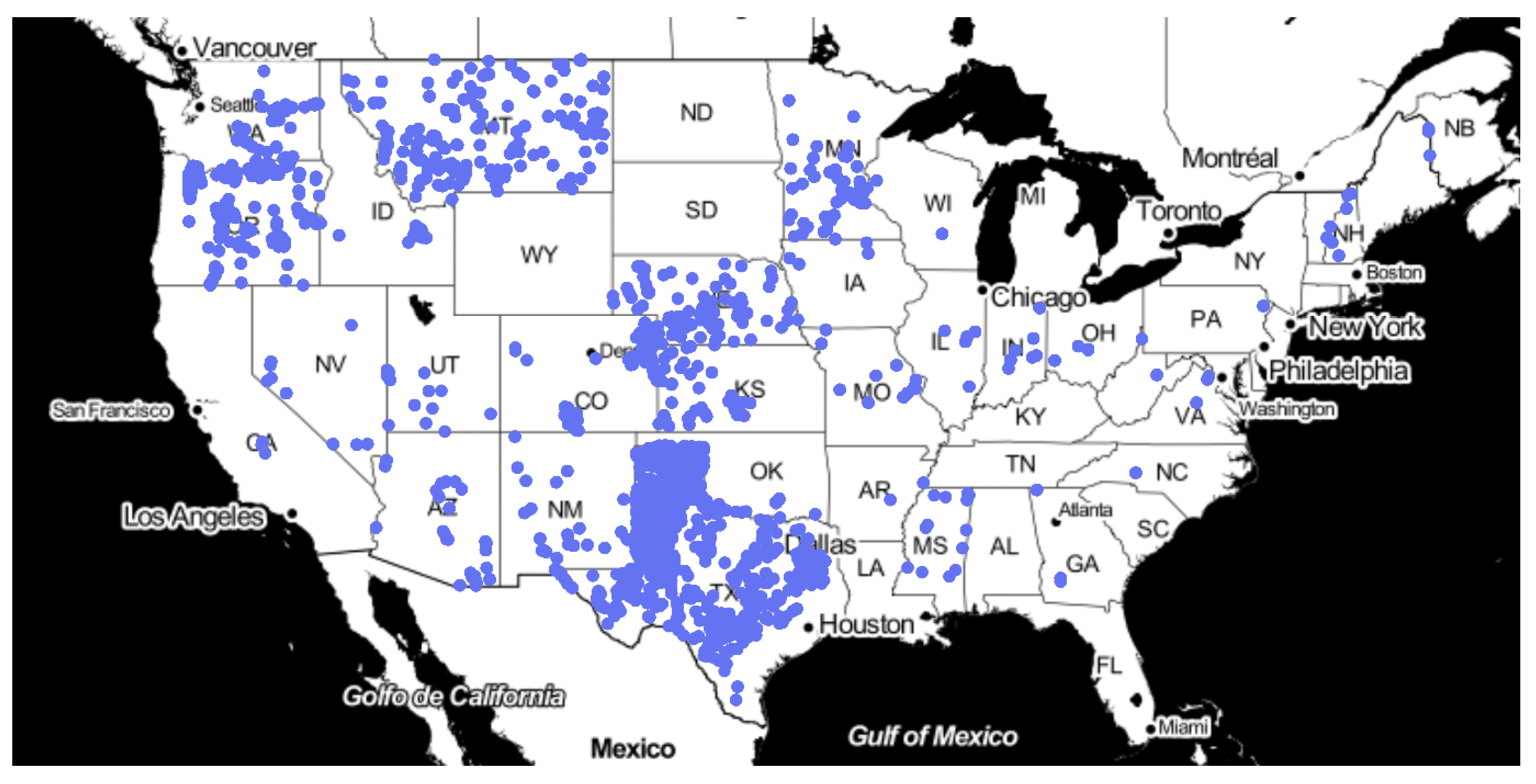
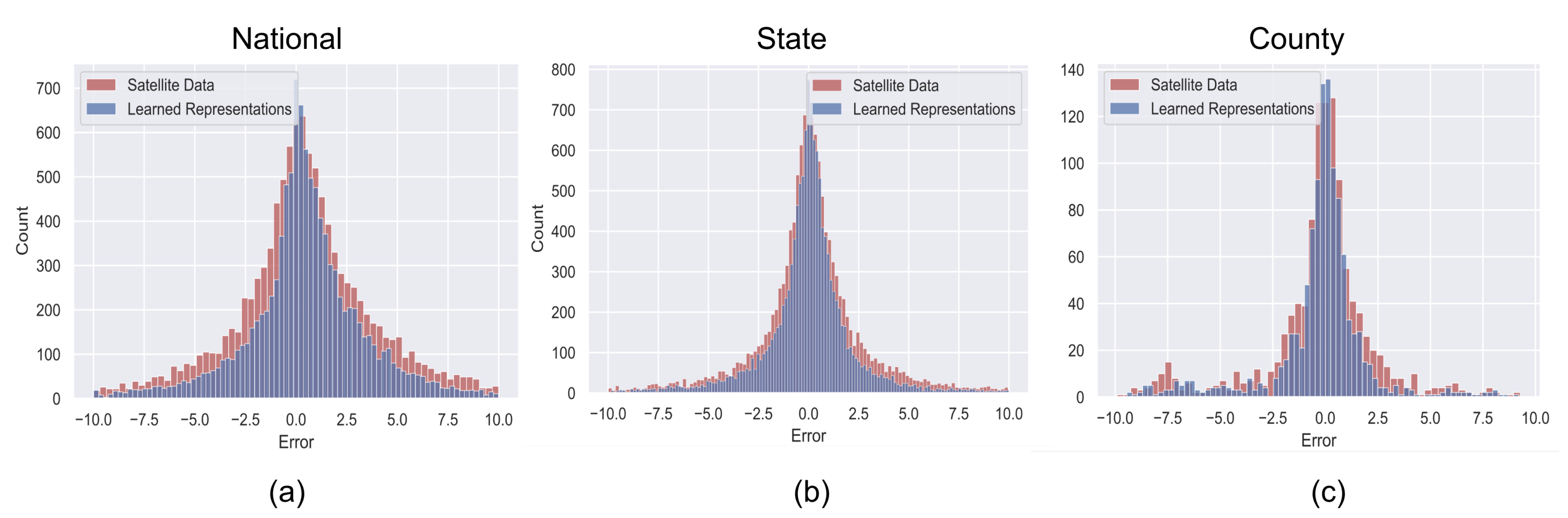
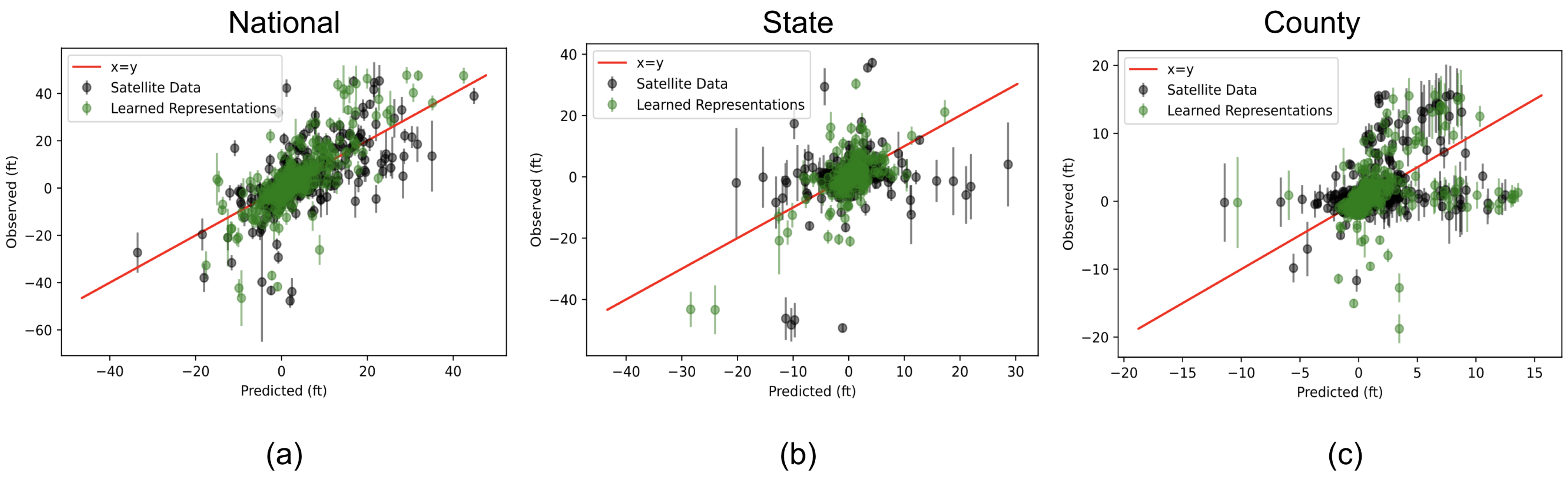
3.1. National Model
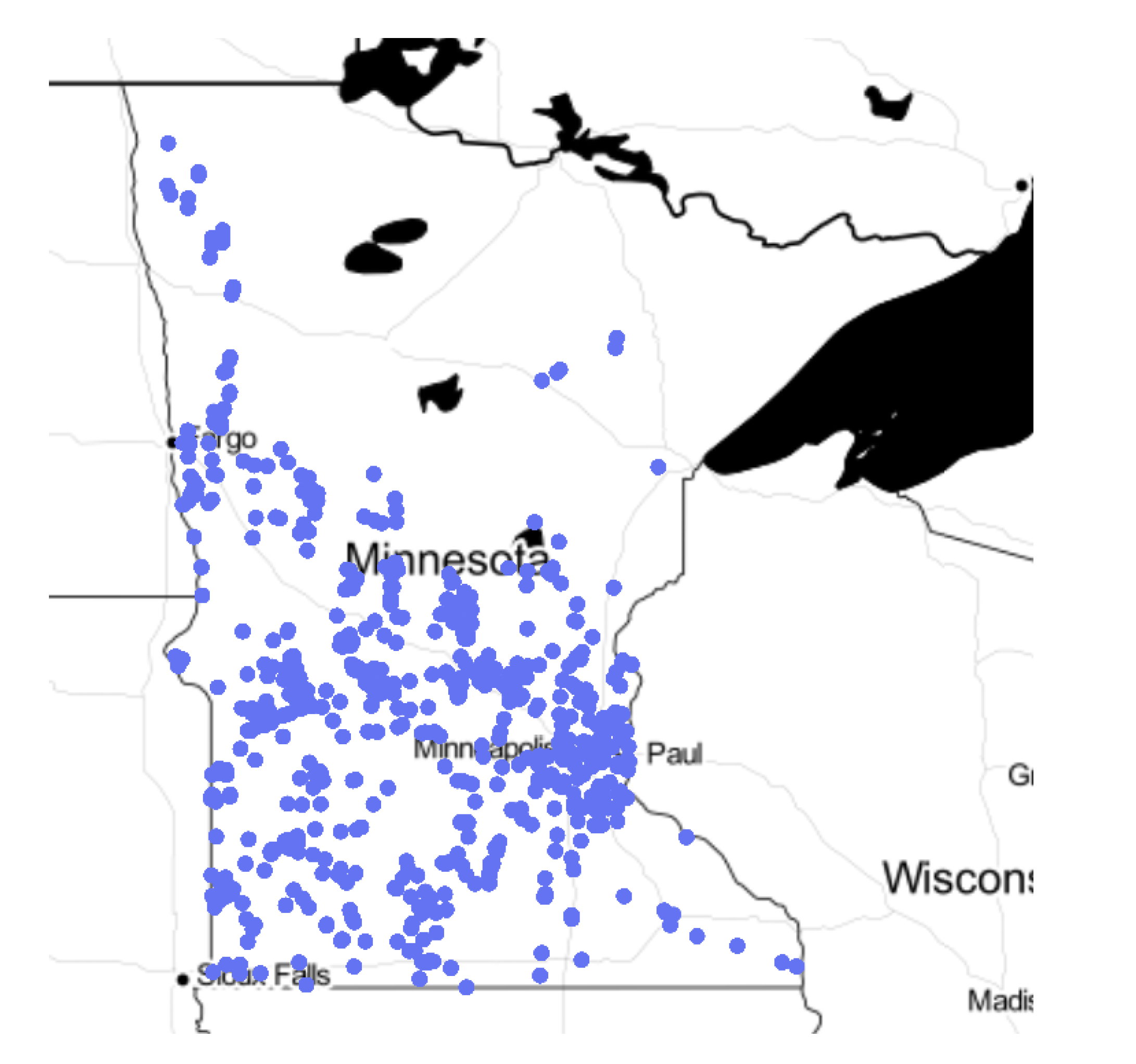
3.2. State Model
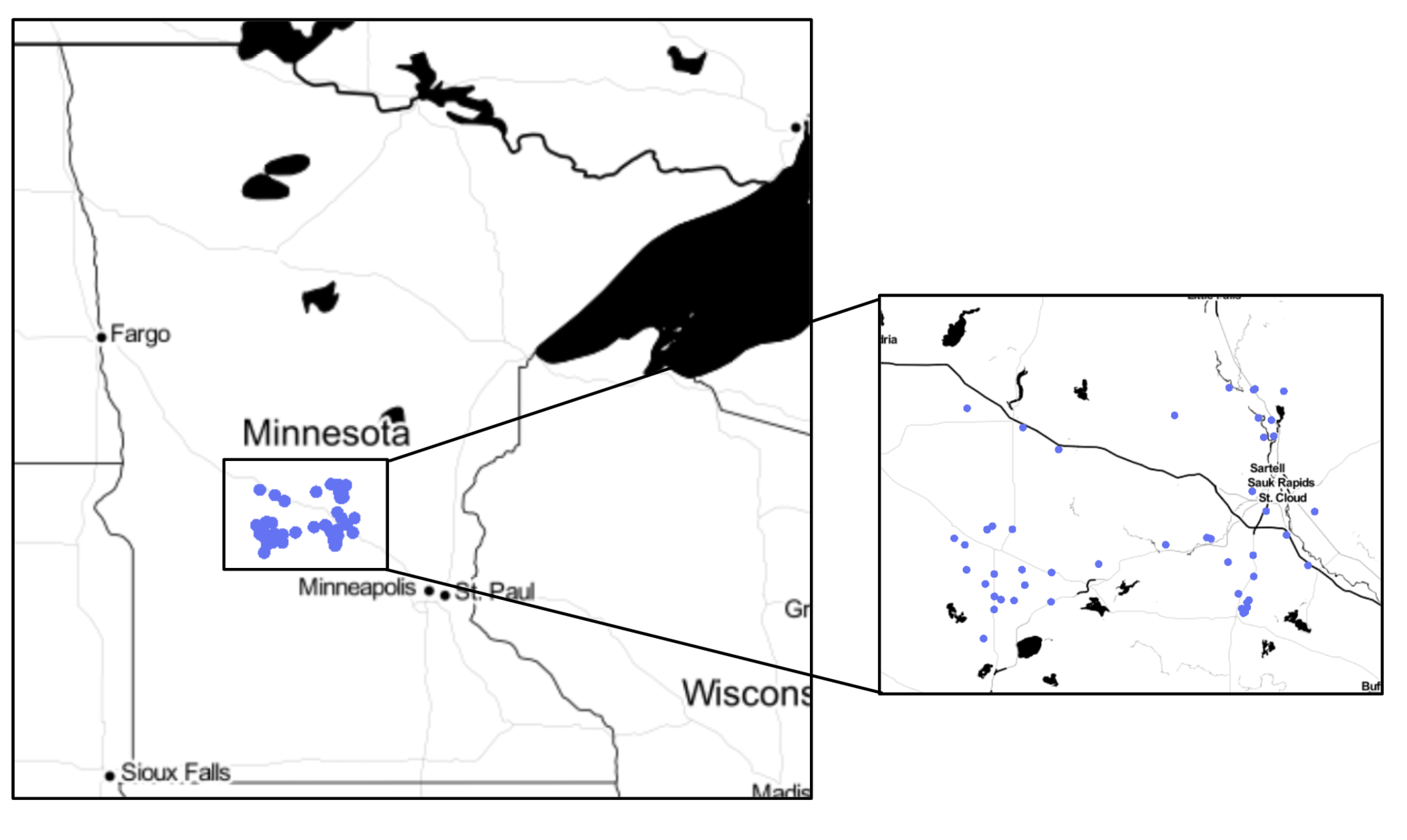
3.3. County Model
3.4. Error Analysis Metrics
3.4.1. Mean Absolute Error (MAE)
3.4.2. Correlation Coefficient (R)
3.4.3. Nash–Sutcliffe efficiency (NSE)
3.4.4. Spearman Rho
3.4.5. Root Mean Square Error (RMSE)
4. Results
5. Discussion
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CLSM | Catchment Land Surface Model |
| GLDAS | Global Land Data Assimilation |
| GRACE | Gravity Recovery and Climate Experiment |
| GWLA | Groundwater Level Anomaly |
| MAR | Managed Aquifer Recharge |
| TWS | Terrestrial Water Storage |
| NSE | Nash–Sutcliffe Efficiency |
| RMSE | Root Mean Square Error |
| MAE | Mean Absolute Error |
References
- UN-Water. Groundwater overview: Making the invisible visible. Produced by International Groundwater Resources Assessment Centre, in cooperation with UNESCO-IHP, IAH, IWMI and with contributions of many UN-Water members and partners. 2018. Available online: https://www.unwater.org/publications/groundwater-overview-making-invisible-visible (accessed on 8 September 2022).
- Jasechko, S.; Perrone, D. Global groundwater wells at risk of running dry. Science 2021, 372, 418–421. [Google Scholar] [CrossRef] [PubMed]
- Salehi, M. Global water shortage and potable water safety; Today’s concern and tomorrow’s crisis. Environ. Int. 2022, 158, 106936. [Google Scholar] [CrossRef]
- Elshall, A.S.; Ye, M.; Wan, Y. Groundwater sustainability in a digital world. In Water and Climate Change; Elsevier: Amsterdam, The Netherlands, 2022; pp. 215–240. [Google Scholar]
- Priyan, K. Issues and challenges of groundwater and surface water management in semi-arid regions. Groundw. Resour. Dev. Plan. Semi-Arid Reg. 2021, 1–17. Available online: https://link.springer.com/chapter/10.1007/978-3-030-68124-1_1 (accessed on 6 September 2022).
- Choy, J. High Quality Groundwater Data Isn’t Always Easy or Cheap, But It Is Necessary. Standford Water West 2016. Available online: https://waterinthewest.stanford.edu/news-events/news-insights/high-quality-groundwater-data-isn%E2%80%99t-always-easy-or-cheap-it-necessary (accessed on 8 September 2022).
- Mogheir, Y.; De Lima, J.; Singh, V. Assessment of informativeness of groundwater monitoring in developing regions (Gaza Strip Case Study). Water Resour. Manag. 2005, 19, 737–757. [Google Scholar] [CrossRef]
- Dillon, P.; Stuyfzand, P.; Grischek, T.; Lluria, M.; Pyne, R.; Jain, R.; Bear, J.; Schwarz, J.; Wang, W.; Fernandez, E.; et al. Sixty years of global progress in managed aquifer recharge. Hydrogeol. J. 2019, 27, 1–30. [Google Scholar] [CrossRef]
- Condon, L.E.; Kollet, S.; Bierkens, M.F.; Fogg, G.E.; Maxwell, R.M.; Hill, M.C.; Fransen, H.J.H.; Verhoef, A.; Van Loon, A.F.; Sulis, M.; et al. Global groundwater modeling and monitoring: Opportunities and challenges. Water Resour. Res. 2021, 57, e2020WR029500. [Google Scholar] [CrossRef]
- Schumacher, M.; Forootan, E.; van Dijk, A.I.; Schmied, H.M.; Crosbie, R.S.; Kusche, J.; Döll, P. Improving drought simulations within the Murray-Darling Basin by combined calibration/assimilation of GRACE data into the WaterGAP Global Hydrology Model. Remote Sens. Environ. 2018, 204, 212–228. [Google Scholar] [CrossRef]
- Li, B.; Rodell, M.; Kumar, S.; Beaudoing, H.K.; Getirana, A.; Zaitchik, B.F.; de Goncalves, L.G.; Cossetin, C.; Bhanja, S.; Mukherjee, A.; et al. Global GRACE data assimilation for groundwater and drought monitoring: Advances and challenges. Water Resour. Res. 2019, 55, 7564–7586. [Google Scholar] [CrossRef]
- Mascarelli, A. Demand for Water Outstrips Supply. Nature 2012. Available online: https://www.nature.com/articles/nature.2012.11143.pdf?origin=ppub (accessed on 8 September 2022). [CrossRef]
- Ahmadi, A.; Olyaei, M.; Heydari, Z.; Emami, M.; Zeynolabedin, A.; Ghomlaghi, A.; Daccache, A.; Fogg, G.E.; Sadegh, M. Groundwater level modeling with machine learning: A systematic review and meta-analysis. Water 2022, 14, 949. [Google Scholar] [CrossRef]
- Ali, S.; Liu, D.; Fu, Q.; Cheema, M.J.M.; Pal, S.C.; Arshad, A.; Pham, Q.B.; Zhang, L. Constructing high-resolution groundwater drought at spatio-temporal scale using GRACE satellite data based on machine learning in the Indus Basin. J. Hydrol. 2022, 128295. [Google Scholar] [CrossRef]
- Ali, S.; Liu, D.; Fu, Q.; Cheema, M.J.M.; Pham, Q.B.; Rahaman, M.M.; Dang, T.D.; Anh, D.T. Improving the resolution of grace data for spatio-temporal groundwater storage assessment. Remote Sens. 2021, 13, 3513. [Google Scholar] [CrossRef]
- Gorugantula, S.S.; Kambhammettu, B.P. Sequential downscaling of GRACE products to map groundwater level changes in Krishna river basin. Hydrol. Sci. J. 2022. [Google Scholar] [CrossRef]
- Tao, H.; Hameed, M.M.; Marhoon, H.A.; Zounemat-Kermani, M.; Salim, H.; Sungwon, K.; Sulaiman, S.O.; Tan, M.L.; Sa’adi, Z.; Mehr, A.D.; et al. Groundwater level prediction using machine learning models: A comprehensive review. Neurocomputing 2022, 489, 271–308. [Google Scholar] [CrossRef]
- Mikolov, T.; Chen, K.; Corrado, G.; Dean, J. Efficient Estimation of Word Representations in Vector Space. arXiv 2013, arXiv:1301.3781. [Google Scholar] [CrossRef]
- Sivakumar, S.; Videla, L.S.; Kumar, T.R.; Nagaraj, J.; Itnal, S.; Haritha, D. Review on Word2Vec Word Embedding Neural Net. In Proceedings of the 2020 International Conference on Smart Electronics and Communication (ICOSEC), Trichy, India, 10–12 September 2020; pp. 282–290. [Google Scholar]
- Agastya, C.; Ghebremusse, S.; Anderson, I.; Vahabi, H.; Todeschini, A. Self-supervised Contrastive Learning for Irrigation Detection in Satellite Imagery. arXiv 2021, arXiv:2108.05484. [Google Scholar]
- Jean, N.; Wang, S.; Samar, A.; Azzari, G.; Lobell, D.; Ermon, S. Tile2vec: Unsupervised representation learning for spatially distributed data. Proc. AAAI Conf. Artif. Intell. 2019, 33, 3967–3974. [Google Scholar] [CrossRef]
- Rahaman, M.M.; Thakur, B.; Kalra, A.; Li, R.; Maheshwari, P. Estimating high-resolution groundwater storage from GRACE: A random forest approach. Environments 2019, 6, 63. [Google Scholar] [CrossRef]
- Walton, B. US Groundwater Losses Between 1900–2008: Enough To Fill Lake Erie Twice. Circ. Blue 2013. Available online: http://www.ashergrey.info/uploads/1/4/8/3/14835916/circleofblue.org-us_groundwater_losses_between_19002008_enough_to_fill_lake_erie_twice.pdf (accessed on 6 September 2022).
- Konikow, L.F. Groundwater Depletion in the United States (1900-2008); US Department of the Interior, US Geological Survey: Reston, VA, USA, 2013. [Google Scholar]
- Steward, D.R.; Bruss, P.J.; Yang, X.; Staggenborg, S.A.; Welch, S.M.; Apley, M.D. Tapping unsustainable groundwater stores for agricultural production in the High Plains Aquifer of Kansas, projections to 2110. Proc. Natl. Acad. Sci. USA 2013, 110, E3477–E3486. [Google Scholar] [CrossRef]
- Groundwater. Available online: https://www.dnr.state.mn.us/waters/groundwater_section/index.html (accessed on 8 September 2022).
- Miro, M.E.; Famiglietti, J.S. Downscaling GRACE remote sensing datasets to high-resolution groundwater storage change maps of California’s Central Valley. Remote Sens. 2018, 10, 143. [Google Scholar] [CrossRef]
- Wager, S.; Hastie, T.; Efron, B. Confidence intervals for random forests: The jackknife and the infinitesimal jackknife. J. Mach. Learn. Res. 2014, 15, 1625–1651. [Google Scholar] [PubMed]
- Polimis, K.; Rokem, A.; Hazelton, B. Confidence intervals for random forests in python. J. Open Source Softw. 2017, 2, 124. [Google Scholar] [CrossRef] [Green Version]
- Alley, W.M.; Konikow, L.F. Bringing GRACE down to earth. Groundwater 2015, 53, 826–829. [Google Scholar] [CrossRef]
- Jordan, M.I.; Mitchell, T.M. Machine learning: Trends, perspectives, and prospects. Science 2015, 349, 255–260. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Source | Data Type | Units | Spatial Resolution | Temporal Resolution |
|---|---|---|---|---|---|
| GRACE TWS | JPL | Remote Sensing | cm | 1 × 1 | Monthly |
| Precipitation | GPM | Remote Sensing | mm | 0.1 × 0.1 | Monthly |
| Temperature | MERRA-2 | Remote Sensing | K | 0.5 × 0.625 | Monthly |
| Wind speed | GLDAS NOAH | Modeled | m/s | 0.25 × 0.25 | Monthly |
| Evapotranspiration | GLDAS NOAH | Modeled | kg/m/s | 0.25 × 0.25 | Monthly |
| Root zone soil moisture | GLDAS NOAH | Modeled | kg/m | 0.25 × 0.25 | Monthly |
| Baseflow groundwater runoff | GLDAS NOAH | Modeled | kg/m | 0.25 × 0.25 | Monthly |
| Plant canopy surface water | GLDAS NOAH | Modeled | kg/m | 0.25 × 0.25 | Monthly |
| Snow water equivalent | GLDAS NOAH | Modeled | kg/m | 0.25 × 0.25 | Monthly |
| Storm surface runoff | GLDAS NOAH | Modeled | kg/m | 0.25 × 0.25 | Monthly |
| Soil moisture | GLDAS NOAH | Modeled | kg/m | 0.25 × 0.25 | Monthly |
| Elevation | GLDAS Elevation | Modeled | m | 0.25 × 0.25 | Constant |
| Metric | Learned Representations Model | Satellite Data Model | ||||
|---|---|---|---|---|---|---|
| United States | Minnesota | Stearns County | United States | Minnesota | Stearns County | |
| MAE (m) | 1.0241 | 0.6553 | 0.5303 | 1.2832 | 0.8013 | 0.6258 |
| Corr. Coeff. | 0.7830 | 0.4666 | 0.4144 | 0.6588 | 0.1667 | 0.2614 |
| NSE | 0.6131 | 0.2177 | 0.1718 | 0.4341 | 0.0277 | 0.0683 |
| Spearman Rho | 0.7324 | 0.5638 | 0.6075 | 0.6311 | 0.4701 | 0.4851 |
| RMSE (m) | 1.7678 | 1.3106 | 0.9753 | 2.1641 | 1.5240 | 1.036 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ram, A.P. Unsupervised Representation Learning of GRACE Improves Groundwater Predictions. Water 2022, 14, 2947. https://doi.org/10.3390/w14192947
Ram AP. Unsupervised Representation Learning of GRACE Improves Groundwater Predictions. Water. 2022; 14(19):2947. https://doi.org/10.3390/w14192947
Chicago/Turabian StyleRam, Akhila Prabhakar. 2022. "Unsupervised Representation Learning of GRACE Improves Groundwater Predictions" Water 14, no. 19: 2947. https://doi.org/10.3390/w14192947
APA StyleRam, A. P. (2022). Unsupervised Representation Learning of GRACE Improves Groundwater Predictions. Water, 14(19), 2947. https://doi.org/10.3390/w14192947