
Swin Transformer for Complex Coastal Wetland Classification Using the Integration of Sentinel-1 and Sentinel-2 Imagery



Abstract
:1. Introduction
2. Related Works
3. Methods
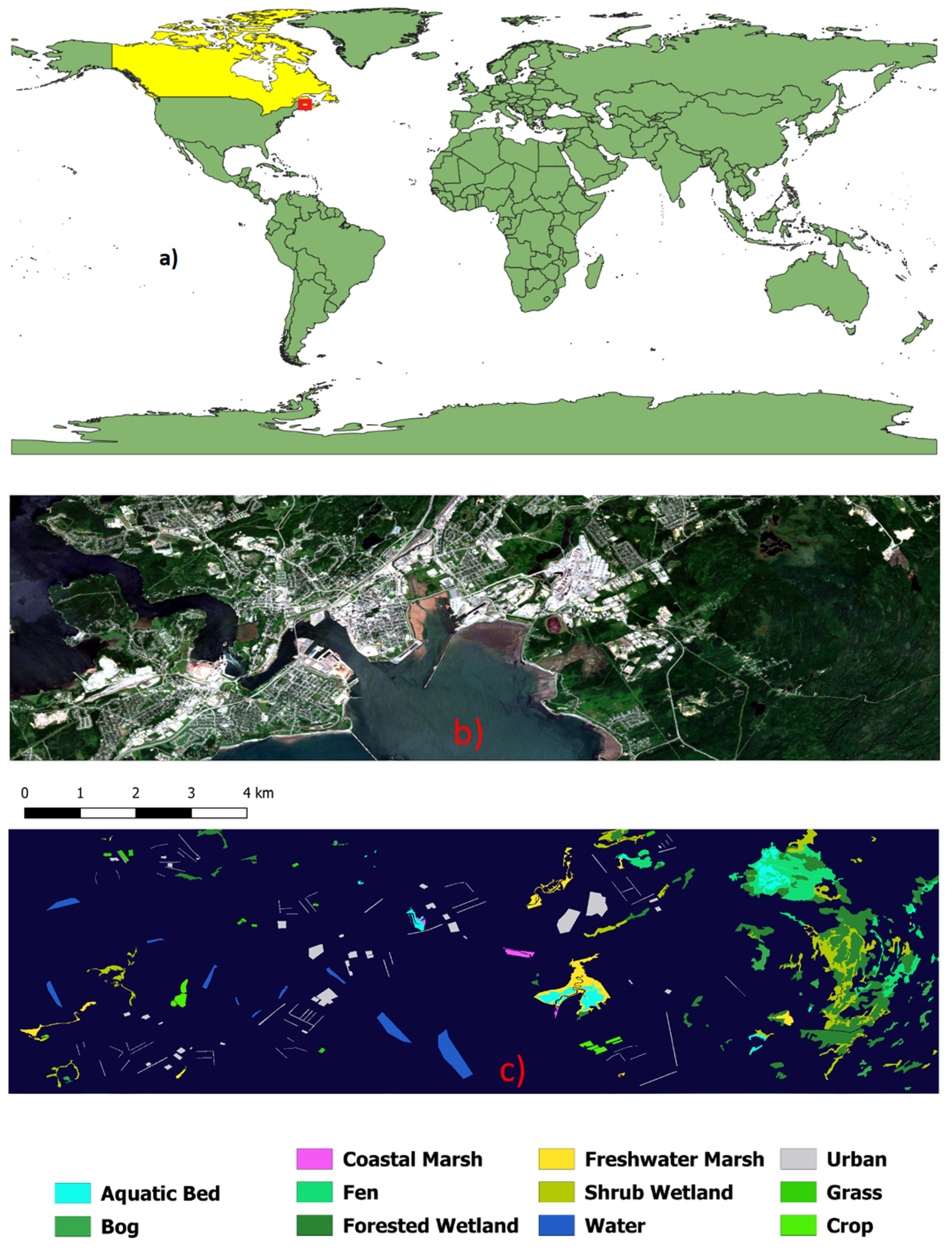
3.1. Study Area and Satellite Data
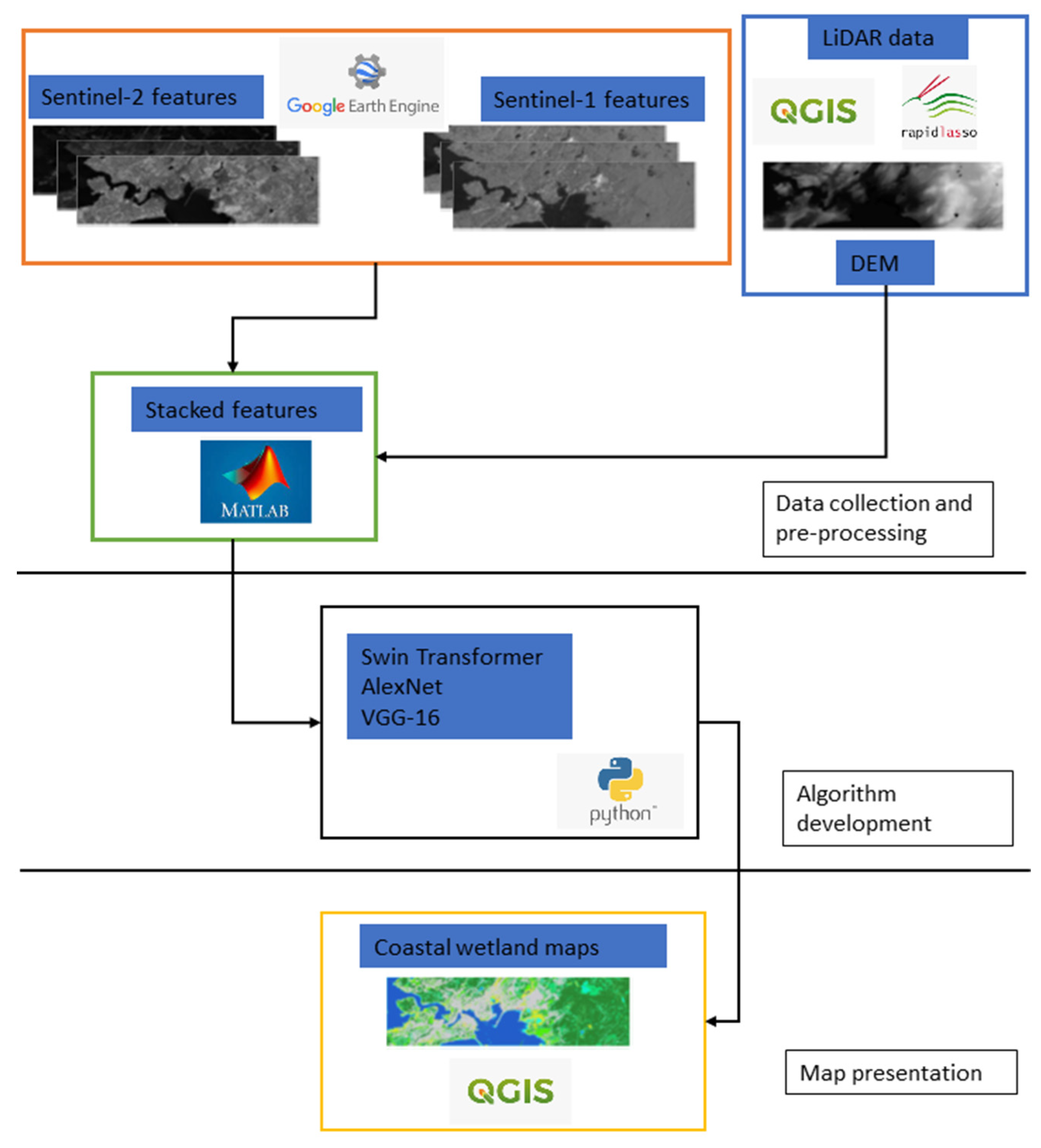
3.2. Methods
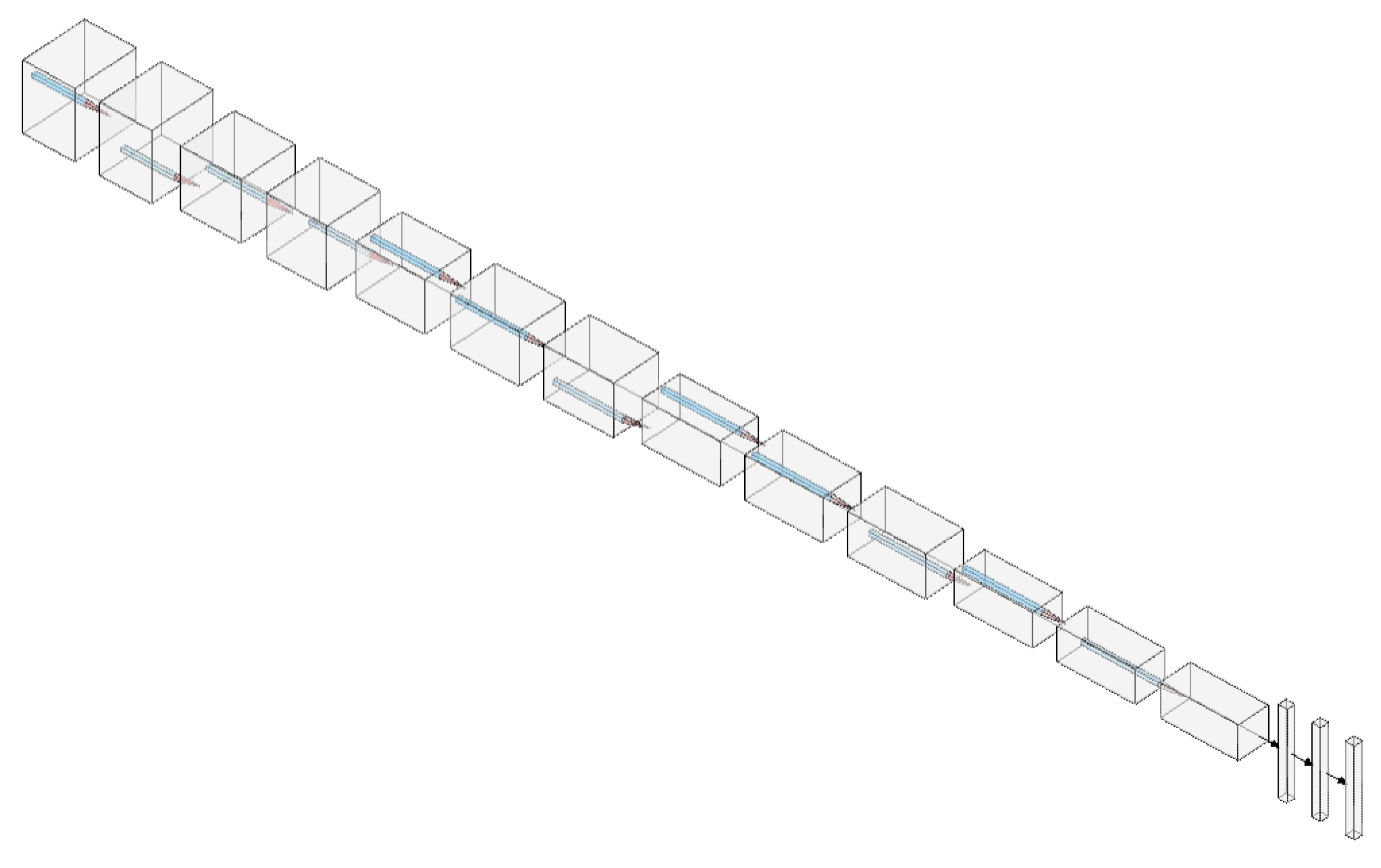
3.2.1. VGG-16
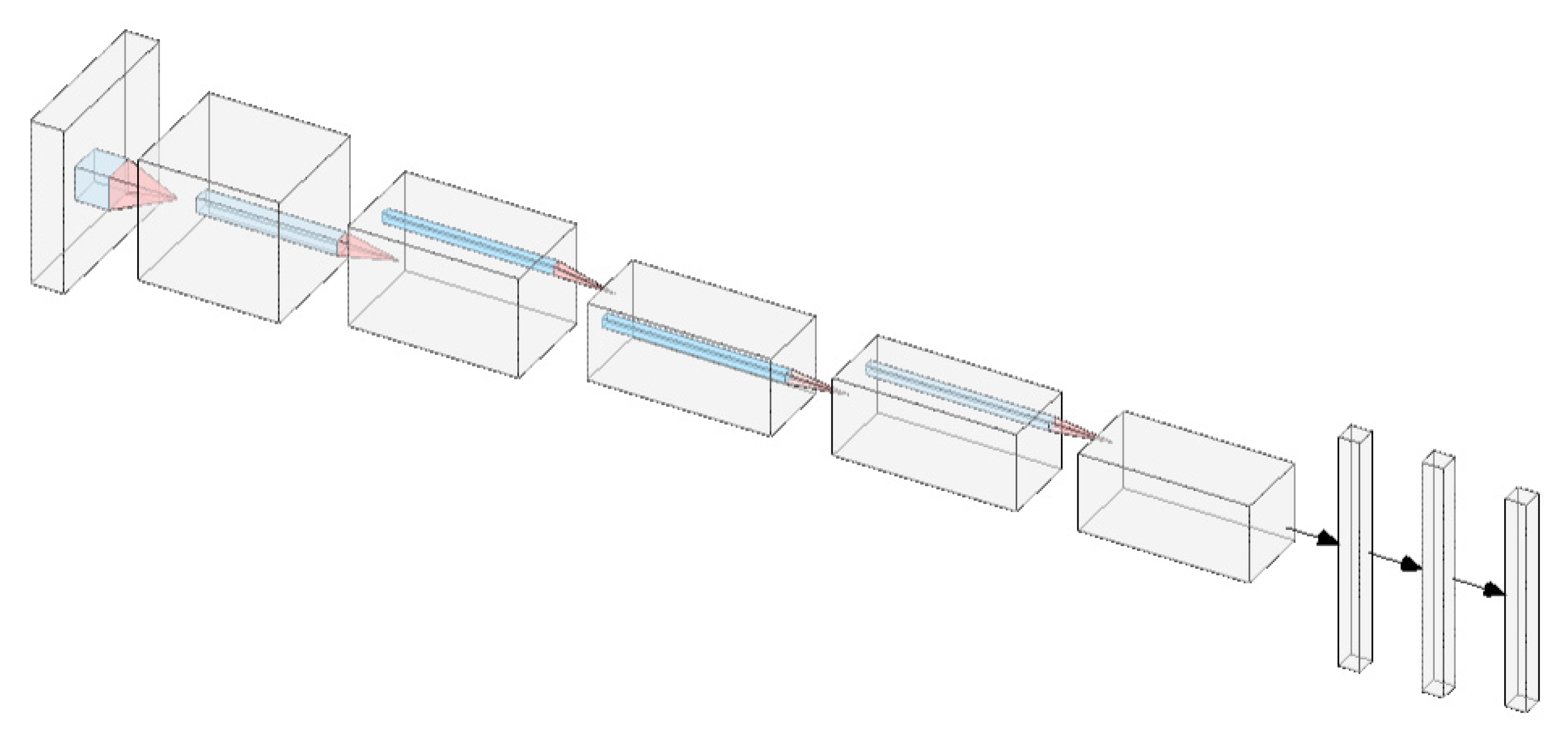
3.2.2. AlexNet
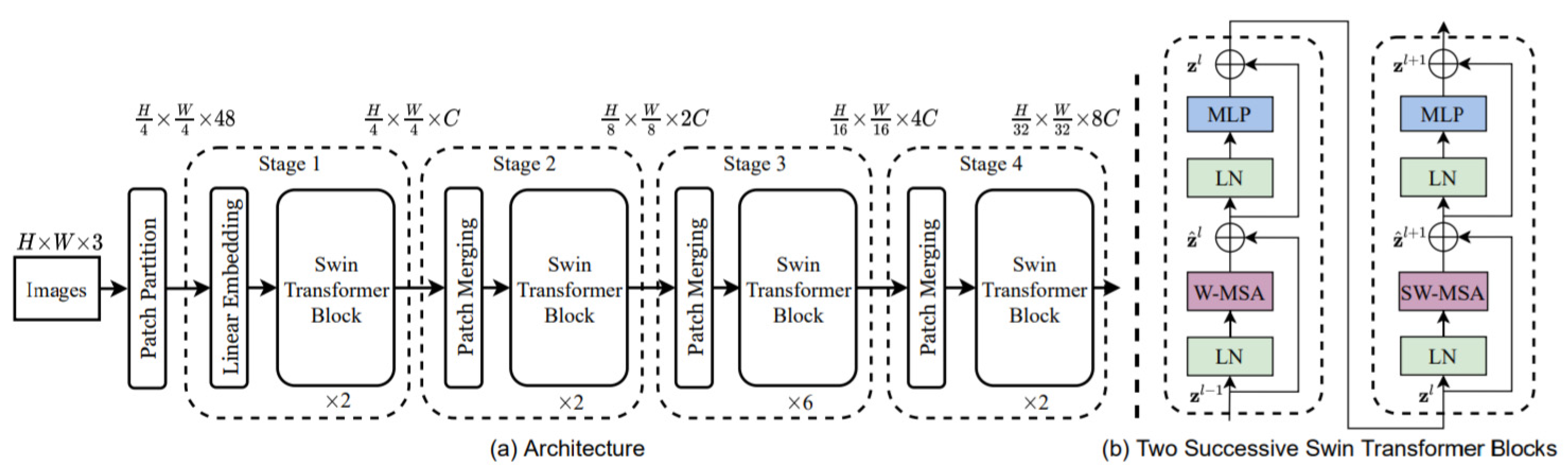
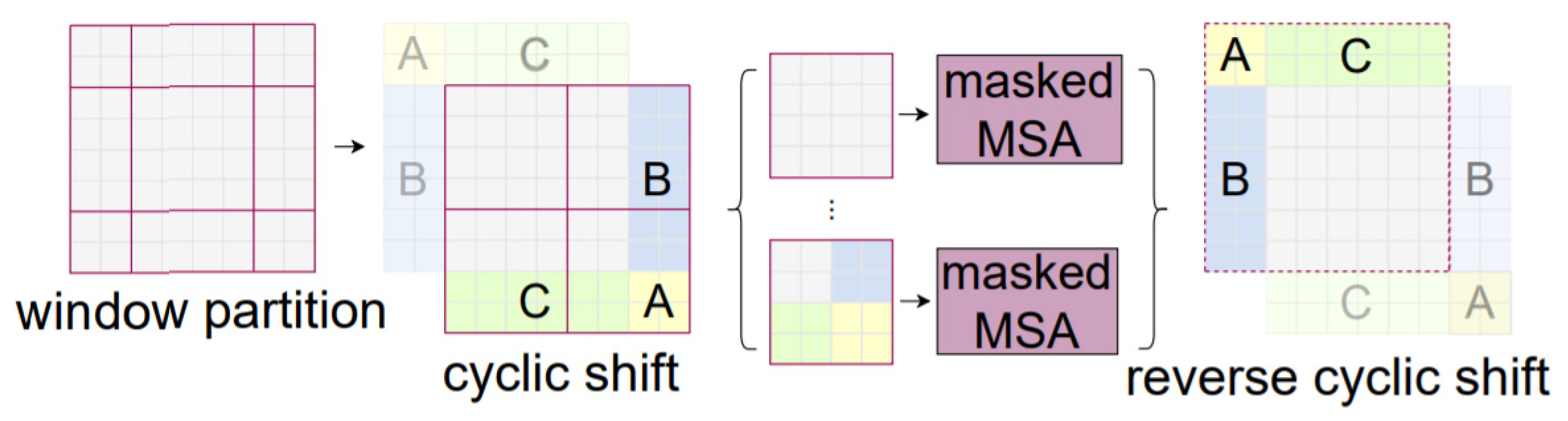
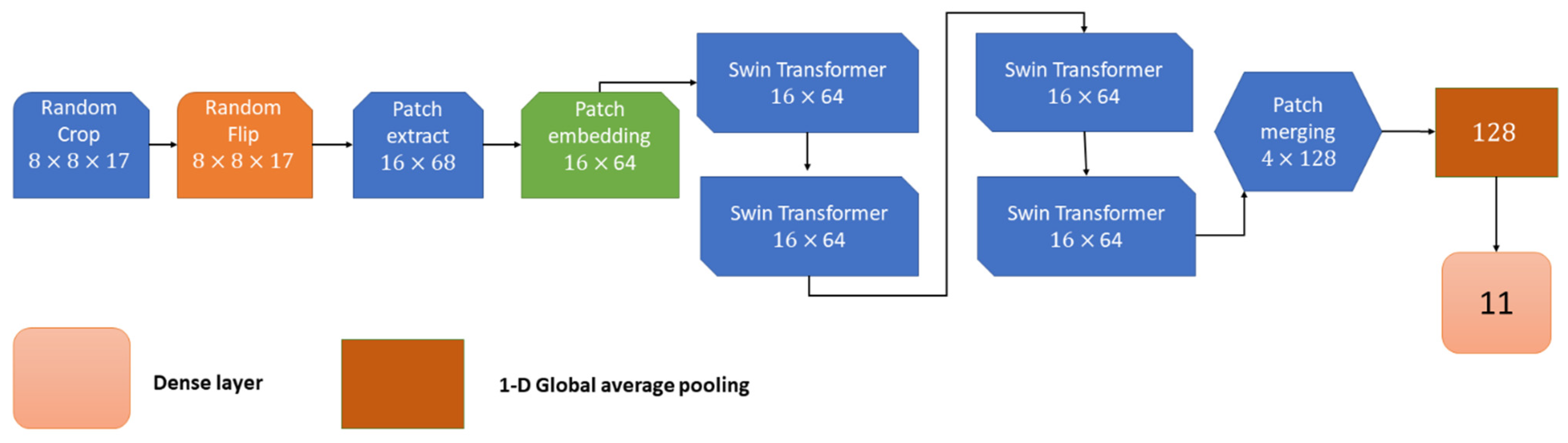
3.2.3. Proposed Swin Transformer Classifier
3.2.4. Accuracy Assessment
4. Results
4.1. Statistical Comparison of Developed Models
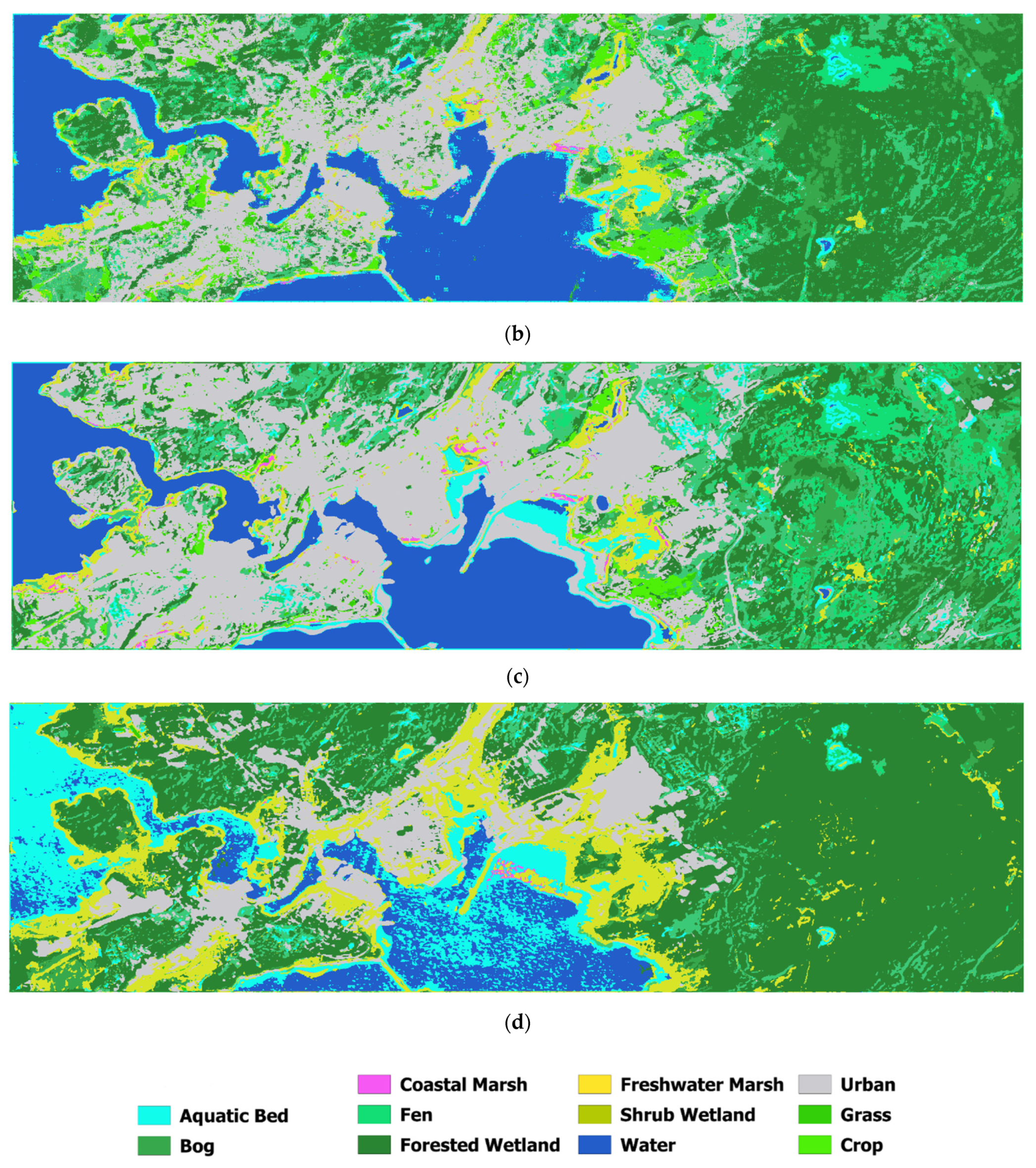
4.2. Wetland Maps of the Study Area of Saint John City
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Davidson, N.C. The Ramsar Convention on Wetlands. In The Wetland Book I: Structure and Function, Management and Methods; Springer: Dordrecht, The Netherlands, 2016. [Google Scholar]
- Jamali, A.; Mahdianpari, M.; Brisco, B.; Granger, J.; Mohammadimanesh, F.; Salehi, B. Wetland Mapping Using Multi-Spectral Satellite Imagery and Deep Convolutional Neural Networks: A Case Study in Newfoundland and Labrador, Canada. Can. J. Remote Sens. 2021, 47, 243–260. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Homayouni, S.; Gill, E. The First Wetland Inventory Map of Newfoundland at a Spatial Resolution of 10 m Using Sentinel-1 and Sentinel-2 Data on the Google Earth Engine Cloud Computing Platform. Remote Sens. 2019, 11, 43. [Google Scholar] [CrossRef] [Green Version]
- Mitsch, W.J.; Bernal, B.; Hernandez, M.E. Ecosystem Services of Wetlands. Int. J. Biodivers. Sci. Ecosyst. Serv. Manag. 2015, 11, 1–4. [Google Scholar] [CrossRef] [Green Version]
- van Asselen, S.; Verburg, P.H.; Vermaat, J.E.; Janse, J.H. Drivers of Wetland Conversion: A Global Meta-Analysis. PLoS ONE 2013, 8, e81292. [Google Scholar] [CrossRef] [Green Version]
- Mahdavi, S.; Salehi, B.; Granger, J.; Amani, M.; Brisco, B.; Huang, W. Remote Sensing for Wetland Classification: A Comprehensive Review. GIScience Remote Sens. 2018, 55, 623–658. [Google Scholar] [CrossRef]
- Guo, M.; Li, J.; Sheng, C.; Xu, J.; Wu, L. A Review of Wetland Remote Sensing. Sensors 2017, 17, 777. [Google Scholar] [CrossRef] [Green Version]
- Jamali, A.; Mahdianpari, M.; Brisco, B.; Granger, J.; Mohammadimanesh, F.; Salehi, B. Deep Forest Classifier for Wetland Mapping Using the Combination of Sentinel-1 and Sentinel-2 Data. GISci. Remote Sens. 2021, 58, 1072–1089. [Google Scholar] [CrossRef]
- Jamali, A.; Mahdianpari, M.; Brisco, B.; Granger, J.; Mohammadimanesh, F.; Salehi, B. Comparing Solo Versus Ensemble Convolutional Neural Networks for Wetland Classification Using Multi-Spectral Satellite Imagery. Remote Sens. 2021, 13, 2046. [Google Scholar] [CrossRef]
- Costanza, R.; de Groot, R.; Sutton, P.; van der Ploeg, S.; Anderson, S.J.; Kubiszewski, I.; Farber, S.; Turner, R.K. Changes in the Global Value of Ecosystem Services. Glob. Environ. Chang. 2014, 26, 152–158. [Google Scholar] [CrossRef]
- De Groot, R.; Brander, L.; van der Ploeg, S.; Costanza, R.; Bernard, F.; Braat, L.; Christie, M.; Crossman, N.; Ghermandi, A.; Hein, L.; et al. Global Estimates of the Value of Ecosystems and Their Services in Monetary Units. Ecosyst. Serv. 2012, 1, 50–61. [Google Scholar] [CrossRef]
- Zedler, J.B.; Kercher, S. Causes and Consequences of Invasive Plants in Wetlands: Opportunities, Opportunists, and Outcomes. Crit. Rev. Plant Sci. 2004, 23, 431–452. [Google Scholar] [CrossRef]
- Perillo, G.; Wolanski, E.; Cahoon, D.R.; Hopkinson, C.S. Coastal Wetlands: And Integrated Ecosystem Approach; Elsevier: Oxford, UK, 2018. [Google Scholar]
- LaRocque, A.; Phiri, C.; Leblon, B.; Pirotti, F.; Connor, K.; Hanson, A. Wetland Mapping with Landsat 8 OLI, Sentinel-1, ALOS-1 PALSAR, and LiDAR Data in Southern New Brunswick, Canada. Remote Sens. 2020, 12, 2095. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Motagh, M. Random Forest Wetland Classification Using ALOS-2 L-Band, RADARSAT-2 C-Band, and TerraSAR-X Imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 13–31. [Google Scholar] [CrossRef]
- DeLancey, E.R.; Simms, J.F.; Mahdianpari, M.; Brisco, B.; Mahoney, C.; Kariyeva, J. Comparing Deep Learning and Shallow Learning for Large-Scale Wetland Classification in Alberta, Canada. Remote Sens. 2020, 12, 2. [Google Scholar] [CrossRef] [Green Version]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Brisco, B.; Gill, E. Full and Simulated Compact Polarimetry Sar Responses to Canadian Wetlands: Separability Analysis and Classification. Remote Sens. 2019, 11, 516. [Google Scholar] [CrossRef] [Green Version]
- Kentsch, S.; Cabezas, M.; Tomhave, L.; Groß, J.; Burkhard, B.; Lopez Caceres, M.L.; Waki, K.; Diez, Y. Analysis of UAV-Acquired Wetland Orthomosaics Using GIS, Computer Vision, Computational Topology and Deep Learning. Sensors 2021, 21, 471. [Google Scholar] [CrossRef]
- Mao, D.; Wang, Z.; Du, B.; Li, L.; Tian, Y.; Jia, M.; Zeng, Y.; Song, K.; Jiang, M.; Wang, Y. National Wetland Mapping in China: A New Product Resulting from Object-Based and Hierarchical Classification of Landsat 8 OLI Images. ISPRS J. Photogramm. Remote Sens. 2020, 164, 11–25. [Google Scholar] [CrossRef]
- Amani, M.; Brisco, B.; Mahdavi, S.; Ghorbanian, A.; Moghimi, A.; DeLancey, E.R.; Merchant, M.; Jahncke, R.; Fedorchuk, L.; Mui, A.; et al. Evaluation of the Landsat-Based Canadian Wetland Inventory Map Using Multiple Sources: Challenges of Large-Scale Wetland Classification Using Remote Sensing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 32–52. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random Forest in Remote Sensing: A Review of Applications and Future Directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Camargo, F.F.; Sano, E.E.; Almeida, C.M.; Mura, J.C.; Almeida, T. A Comparative Assessment of Machine-Learning Techniques for Land Use and Land Cover Classification of the Brazilian Tropical Savanna Using ALOS-2/PALSAR-2 Polarimetric Images. Remote Sens. 2019, 11, 1600. [Google Scholar] [CrossRef] [Green Version]
- Collins, L.; Griffioen, P.; Newell, G.; Mellor, A. The Utility of Random Forests for Wildfire Severity Mapping. Remote Sens. Environ. 2018, 216, 374–384. [Google Scholar] [CrossRef]
- Collins, L.; McCarthy, G.; Mellor, A.; Newell, G.; Smith, L. Training Data Requirements for Fire Severity Mapping Using Landsat Imagery and Random Forest. Remote Sens. Environ. 2020, 245, 111839. [Google Scholar] [CrossRef]
- Congalton, R.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Bazi, Y.; Bashmal, L.; Rahhal, M.M.A.; Dayil, R.A.; Ajlan, N.A. Vision Transformers for Remote Sensing Image Classification. Remote Sens. 2021, 13, 516. [Google Scholar] [CrossRef]
- He, J.; Zhao, L.; Yang, H.; Zhang, M.; Li, W. HSI-BERT: Hyperspectral Image Classification Using the Bidirectional Encoder Representation from Transformers. IEEE Trans. Geosci. Remote Sens. 2020, 58, 165–178. [Google Scholar] [CrossRef]
- Hong, D.; Han, Z.; Yao, J.; Gao, L.; Zhang, B.; Plaza, A.; Chanussot, J. SpectralFormer: Rethinking Hyperspectral Image Classification with Transformers. IEEE Trans. Geosci. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Azeez, N.; Yahya, W.; Al-Taie, I.; Basbrain, A.; Clark, A. Regional Agricultural Land Classification Based on Random Forest (RF), Decision Tree, and SVMs Techniques; Springer: Berlin/Heidelberg, Germany, 2020; pp. 73–81. [Google Scholar]
- Berhane, T.M.; Lane, C.R.; Wu, Q.; Autrey, B.C.; Anenkhonov, O.A.; Chepinoga, V.V.; Liu, H. Decision-Tree, Rule-Based, and Random Forest Classification of High-Resolution Multispectral Imagery for Wetland Mapping and Inventory. Remote Sens. 2018, 10, 580. [Google Scholar] [CrossRef] [Green Version]
- Bennett, K.P. Global Tree Optimization: A Non-Greedy Decision Tree Algorithm. Comput. Sci. Stat. 1995, 26, 156. [Google Scholar]
- Ebrahimy, H.; Mirbagheri, B.; Matkan, A.A.; Azadbakht, M. Per-Pixel Land Cover Accuracy Prediction: A Random Forest-Based Method with Limited Reference Sample Data. ISPRS J. Photogramm. Remote Sens. 2021, 172, 17–27. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Sheykhmousa, M.; Mahdianpari, M.; Ghanbari, H.; Mohammadimanesh, F.; Ghamisi, P.; Homayouni, S. Support Vector Machine Versus Random Forest for Remote Sensing Image Classification: A Meta-Analysis and Systematic Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6308–6325. [Google Scholar] [CrossRef]
- Shao, Y.; Lunetta, R.S. Comparison of Support Vector Machine, Neural Network, and CART Algorithms for the Land-Cover Classification Using Limited Training Data Points. ISPRS J. Photogramm. Remote Sens 2012, 70, 78–87. [Google Scholar] [CrossRef]
- Alhichri, H.; Alswayed, A.S.; Bazi, Y.; Ammour, N.; Alajlan, N.A. Classification of Remote Sensing Images Using EfficientNet-B3 CNN Model with Attention. IEEE Access 2021, 9, 14078–14094. [Google Scholar] [CrossRef]
- Zhang, C.; Pan, X.; Li, H.; Gardiner, A.; Sargent, I.; Hare, J.; Atkinson, P.M. A Hybrid MLP-CNN Classifier for Very Fine Resolution Remotely Sensed Image Classification. ISPRS J. Photogramm. Remote Sens. 2018, 140, 133–144. [Google Scholar] [CrossRef] [Green Version]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in Vegetation Remote Sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Liang, J.; Deng, Y.; Zeng, D. A Deep Neural Network Combined CNN and GCN for Remote Sensing Scene Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 4325–4338. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Xie, S.; Girshick, R.; Dollar, P.; Tu, Z.; He, K. Aggregated residual Transformations for Deep Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016. [Google Scholar]
- Cao, J.; Cui, H.; Zhang, Q.; Zhang, Z. Ancient Mural Classification Method Based on Improved AlexNet Network. Stud. Conserv. 2020, 65, 411–423. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. In Advances in Neural Information Processing Systems; The MIT Press: Cambridge, MA, USA, 2017; pp. 5998–6008. [Google Scholar]
- Amani, M.; Salehi, B.; Mahdavi, S.; Brisco, B. Spectral Analysis of Wetlands Using Multi-Source Optical Satellite Imagery. ISPRS J. Photogramm. Remote Sens. 2018, 144, 119–136. [Google Scholar] [CrossRef]
- Amani, M.; Mahdavi, S.; Berard, O. Supervised Wetland Classification Using High Spatial Resolution Optical, SAR, and LiDAR Imagery. J. Appl. Remote Sens. 2020, 14, 024502. [Google Scholar] [CrossRef]
- Jamali, A.; Mahdianpari, M.; Mohammadimanesh, F.; Brisco, B.; Salehi, B. A Synergic Use of Sentinel-1 and Sentinel-2 Imagery for Complex Wetland Classification Using Generative Adversarial Network (GAN) Scheme. Water 2021, 13, 3601. [Google Scholar] [CrossRef]
- Jamali, A.; Mahdianpari, M. A Cloud-Based Framework for Large-Scale Monitoring of Ocean Plastics Using Multi-Spectral Satellite Imagery and Generative Adversarial Network. Water 2021, 13, 2553. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Nets. In Advances in Neural Information Processing Systems; The MIT Press: Cambridge, MA, USA, 2014; Volume 27, pp. 2672–2680. [Google Scholar]
- Zhu, L.; Chen, Y.; Ghamisi, P.; Benediktsson, J.A. Generative Adversarial Networks for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5046–5063. [Google Scholar] [CrossRef]
- NAudebert; le Saux, B.; Lefevre, S. Generative Adversarial Networks for Realistic Synthesis of Hyperspectral Samples. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 4359–4362. [Google Scholar]
- Granger, J.E.; Mahdianpari, M.; Puestow, T.; Warren, S.; Mohammadimanesh, F.; Salehi, B.; Brisco, B. Object-Based Random Forest Wetland Mapping in Conne River, Newfoundland, Canada. J. Appl. Remote Sens. 2021, 15, 1–10. [Google Scholar] [CrossRef]
- Zhang, Y.; Fu, K.; Sun, H.; Sun, X.; Zheng, X.; Wang, H. A Multi-Model Ensemble Method Based on Convolutional Neural Networks for Aircraft Detection in Large Remote Sensing Images. Remote Sens. Lett. 2018, 9, 11–20. [Google Scholar] [CrossRef]
- Hong, D.; Gao, L.; Yokoya, N.; Yao, J.; Chanussot, J.; Du, Q.; Zhang, B. More Diverse Means Better: Multimodal Deep Learning Meets Remote-Sensing Imagery Classification. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4340–4354. [Google Scholar] [CrossRef]
- Srivastava, S.; Kumar, P.; Chaudhry, V.; Singh, A. Detection of Ovarian Cyst in Ultrasound Images Using Fine-Tuned VGG-16 Deep Learning Network. SN Comput. Sci. 2020, 1, 81. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet Classification with Deep Convolutional Neural Networks. In Advances in Neural Information Processing Systems; The MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows. arXiv 2021, arXiv:2103.14030. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Training (Pixels) | Test (Pixels) |
|---|---|---|
| Aquatic bed | 6476 | 2776 |
| Bog | 3833 | 1643 |
| Coastal marsh | 851 | 364 |
| Fen | 15,836 | 6787 |
| Forested wetland | 32,521 | 13,937 |
| Freshwater marsh | 7403 | 3173 |
| Shrub wetland | 15,793 | 6769 |
| Water | 7086 | 3037 |
| Urban | 11,378 | 4876 |
| Grass | 1005 | 431 |
| Crop | 1975 | 846 |
| Data | Normalized Backscattering Coefficients/Spectral Bands | Spectral Indices |
|---|---|---|
| Sentinel-1 | ||
| Sentinel-2 | B2, B3, B4, B5, B6, B7, B8, B8A, B11, B12 | |
| Model | AB | BO | CM | FE | FW | FM | SB | W | U | G | C | AA (%) | OA (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Swin Transformer | 81.48 | 82.52 | |||||||||||
| Precision | 0.85 | 0.72 | 0.87 | 0.80 | 0.82 | 0.81 | 0.75 | 0.94 | 0.93 | 0.73 | 0.89 | ||
| Recall | 0.80 | 0.75 | 0.52 | 0.75 | 0.86 | 0.87 | 0.68 | 0.99 | 0.95 | 0.93 | 0.87 | ||
| F-1 score | 0.82 | 0.73 | 0.65 | 0.78 | 0.84 | 0.84 | 0.71 | 0.97 | 0.94 | 0.82 | 0.88 | ||
| AlexNet | 67.18 | 68.81 | |||||||||||
| Precision | 0.73 | 0.28 | 0.61 | 0.55 | 0.86 | 0.71 | 0.54 | 0.98 | 0.76 | 0.59 | 0.88 | ||
| Recall | 0.86 | 0.55 | 0.44 | 0.72 | 0.62 | 0.78 | 0.40 | 1 | 0.99 | 0.50 | 0.52 | ||
| F-1 score | 0.79 | 0.37 | 0.51 | 0.62 | 0.72 | 0.74 | 0.46 | 0.99 | 0.86 | 0.54 | 0.66 | ||
| VGG-16 | 37.20 | 54.48 | |||||||||||
| Precision | 0.41 | 0.21 | 0.12 | 0.68 | 0.50 | 0.47 | 0.35 | 1 | 0.99 | 0.96 | 0.54 | ||
| Recall | 0.48 | 0.03 | 0.0 | 0.08 | 0.97 | 0.88 | 0.09 | 0.52 | 0.76 | 0.26 | 0.02 | ||
| F-1 score | 0.44 | 0.05 | 0.01 | 0.15 | 0.66 | 0.61 | 0.14 | 0.68 | 0.86 | 0.41 | 0.03 |
| Model | AB | BO | CM | FE | FW | FM | SB | W | U | G | C |
|---|---|---|---|---|---|---|---|---|---|---|---|
| VGG-16 | |||||||||||
| AB | 1329 | 0 | 0 | 229 | 90 | 1054 | 70 | 0 | 3 | 1 | 0 |
| BO | 0 | 49 | 0 | 16 | 1348 | 129 | 101 | 0 | 0 | 0 | 0 |
| CM | 32 | 0 | 1 | 0 | 0 | 323 | 8 | 0 | 0 | 0 | 0 |
| FE | 19 | 0 | 0 | 574 | 5722 | 194 | 278 | 0 | 0 | 0 | 0 |
| FW | 0 | 1 | 0 | 0 | 13,571 | 118 | 241 | 0 | 6 | 0 | 0 |
| FM | 11 | 1 | 0 | 9 | 295 | 2778 | 79 | 0 | 0 | 0 | 0 |
| SB | 8 | 139 | 0 | 1 | 5460 | 545 | 604 | 0 | 12 | 0 | 0 |
| W | 1458 | 0 | 0 | 0 | 9 | 0 | 0 | 1570 | 0 | 0 | 0 |
| U | 55 | 33 | 0 | 21 | 389 | 449 | 214 | 0 | 3715 | 0 | 0 |
| G | 126 | 0 | 7 | 0 | 17 | 62 | 92 | 0 | 2 | 113 | 12 |
| C | 232 | 11 | 0 | 0 | 218 | 288 | 63 | 0 | 16 | 4 | 14 |
| Model | AB | BO | CM | FE | FW | FM | SB | W | U | G | C |
|---|---|---|---|---|---|---|---|---|---|---|---|
| AlexNet | |||||||||||
| AB | 2398 | 1 | 12 | 138 | 1 | 154 | 8 | 24 | 40 | 0 | 0 |
| BO | 58 | 899 | 0 | 314 | 85 | 101 | 100 | 0 | 86 | 0 | 0 |
| CM | 76 | 0 | 161 | 0 | 0 | 73 | 1 | 0 | 53 | 0 | 0 |
| FE | 236 | 657 | 0 | 4897 | 427 | 197 | 372 | 0 | 1 | 0 | 0 |
| FW | 147 | 809 | 2 | 1901 | 8689 | 273 | 1683 | 0 | 427 | 0 | 6 |
| FM | 252 | 17 | 54 | 37 | 3 | 2464 | 107 | 28 | 198 | 0 | 13 |
| SB | 102 | 839 | 3 | 1637 | 920 | 216 | 2686 | 0 | 337 | 0 | 29 |
| W | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3037 | 0 | 0 | 0 |
| U | 29 | 3 | 1 | 1 | 0 | 0 | 14 | 2 | 4826 | 0 | 0 |
| G | 0 | 0 | 15 | 0 | 0 | 8 | 2 | 0 | 174 | 217 | 15 |
| C | 0 | 0 | 18 | 0 | 0 | 7 | 10 | 0 | 215 | 152 | 444 |
| Model | AB | BO | CM | FE | FW | FM | SB | W | U | G | C |
|---|---|---|---|---|---|---|---|---|---|---|---|
| AlexNet | |||||||||||
| AB | 2219 | 1 | 0 | 177 | 3 | 143 | 7 | 152 | 54 | 20 | 0 |
| BO | 1 | 1225 | 0 | 50 | 249 | 9 | 104 | 0 | 5 | 0 | 0 |
| CM | 54 | 0 | 188 | 0 | 0 | 72 | 2 | 12 | 33 | 3 | 0 |
| FE | 99 | 214 | 0 | 5106 | 968 | 26 | 367 | 0 | 7 | 0 | 0 |
| FW | 2 | 202 | 1 | 649 | 11,960 | 64 | 1014 | 0 | 36 | 0 | 9 |
| FM | 201 | 4 | 17 | 25 | 17 | 2751 | 15 | 26 | 111 | 2 | 4 |
| SB | 24 | 58 | 5 | 342 | 1423 | 269 | 4573 | 0 | 61 | 4 | 10 |
| W | 13 | 0 | 0 | 0 | 0 | 0 | 0 | 3021 | 2 | 1 | 0 |
| U | 4 | 6 | 5 | 10 | 26 | 45 | 21 | 0 | 4654 | 45 | 60 |
| G | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 19 | 401 | 7 |
| C | 2 | 0 | 0 | 0 | 0 | 20 | 0 | 0 | 16 | 73 | 735 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamali, A.; Mahdianpari, M. Swin Transformer for Complex Coastal Wetland Classification Using the Integration of Sentinel-1 and Sentinel-2 Imagery. Water 2022, 14, 178. https://doi.org/10.3390/w14020178
Jamali A, Mahdianpari M. Swin Transformer for Complex Coastal Wetland Classification Using the Integration of Sentinel-1 and Sentinel-2 Imagery. Water. 2022; 14(2):178. https://doi.org/10.3390/w14020178
Chicago/Turabian StyleJamali, Ali, and Masoud Mahdianpari. 2022. "Swin Transformer for Complex Coastal Wetland Classification Using the Integration of Sentinel-1 and Sentinel-2 Imagery" Water 14, no. 2: 178. https://doi.org/10.3390/w14020178
APA StyleJamali, A., & Mahdianpari, M. (2022). Swin Transformer for Complex Coastal Wetland Classification Using the Integration of Sentinel-1 and Sentinel-2 Imagery. Water, 14(2), 178. https://doi.org/10.3390/w14020178