
Assessment of Implementing Land Use/Land Cover LULC 2020-ESRI Global Maps in 2D Flood Modeling Application


Abstract
:1. Introduction
2. Materials and Methods
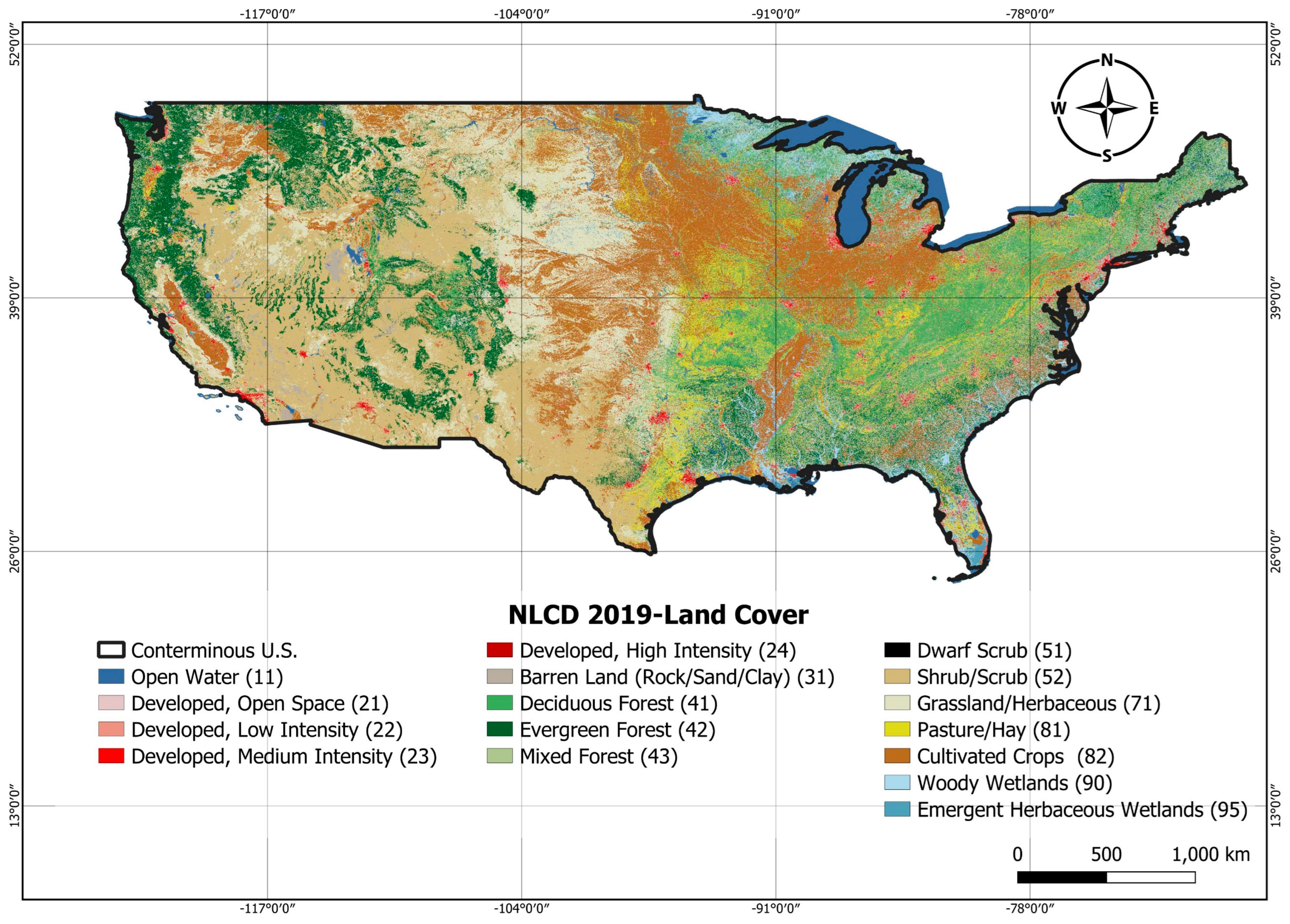
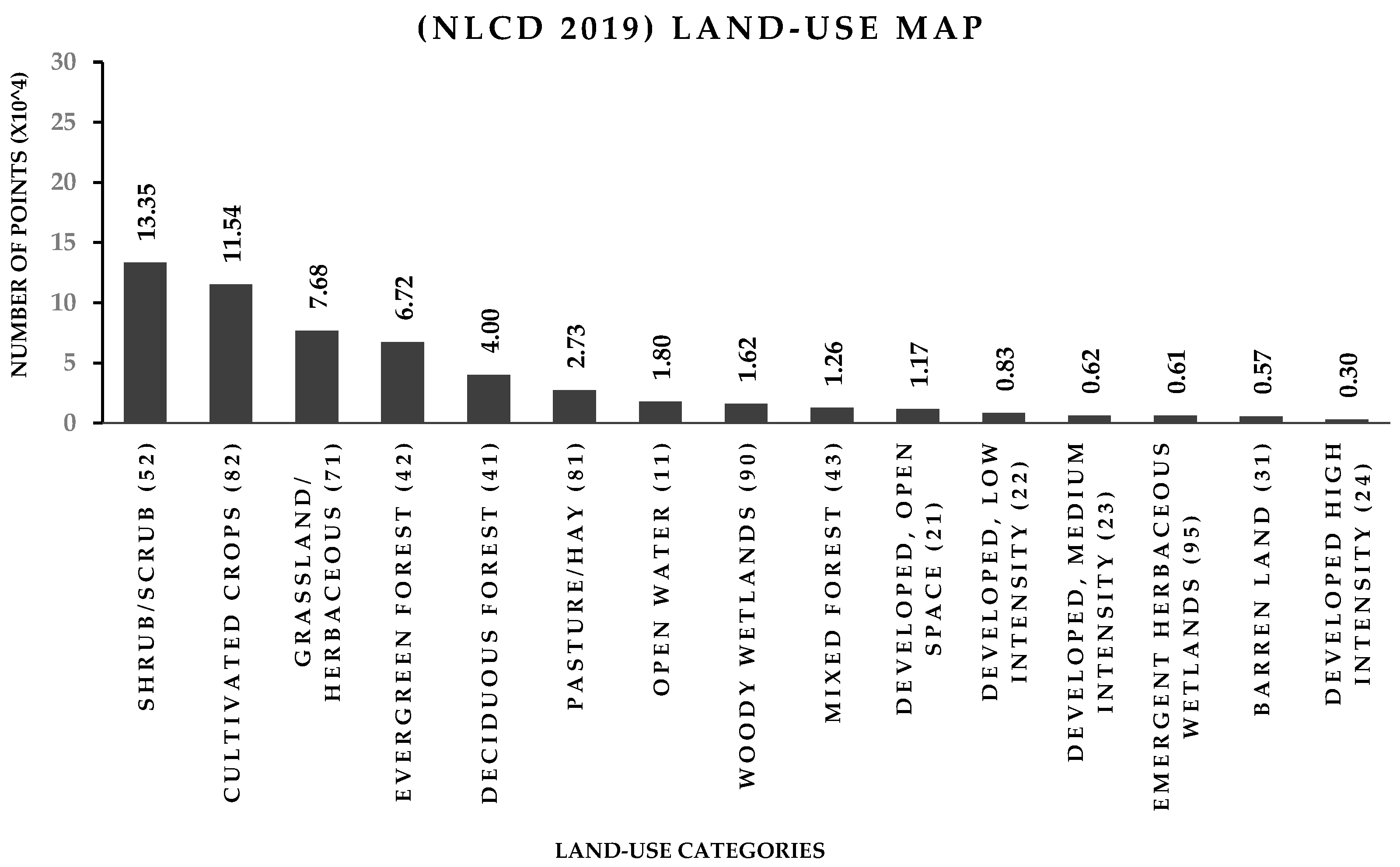
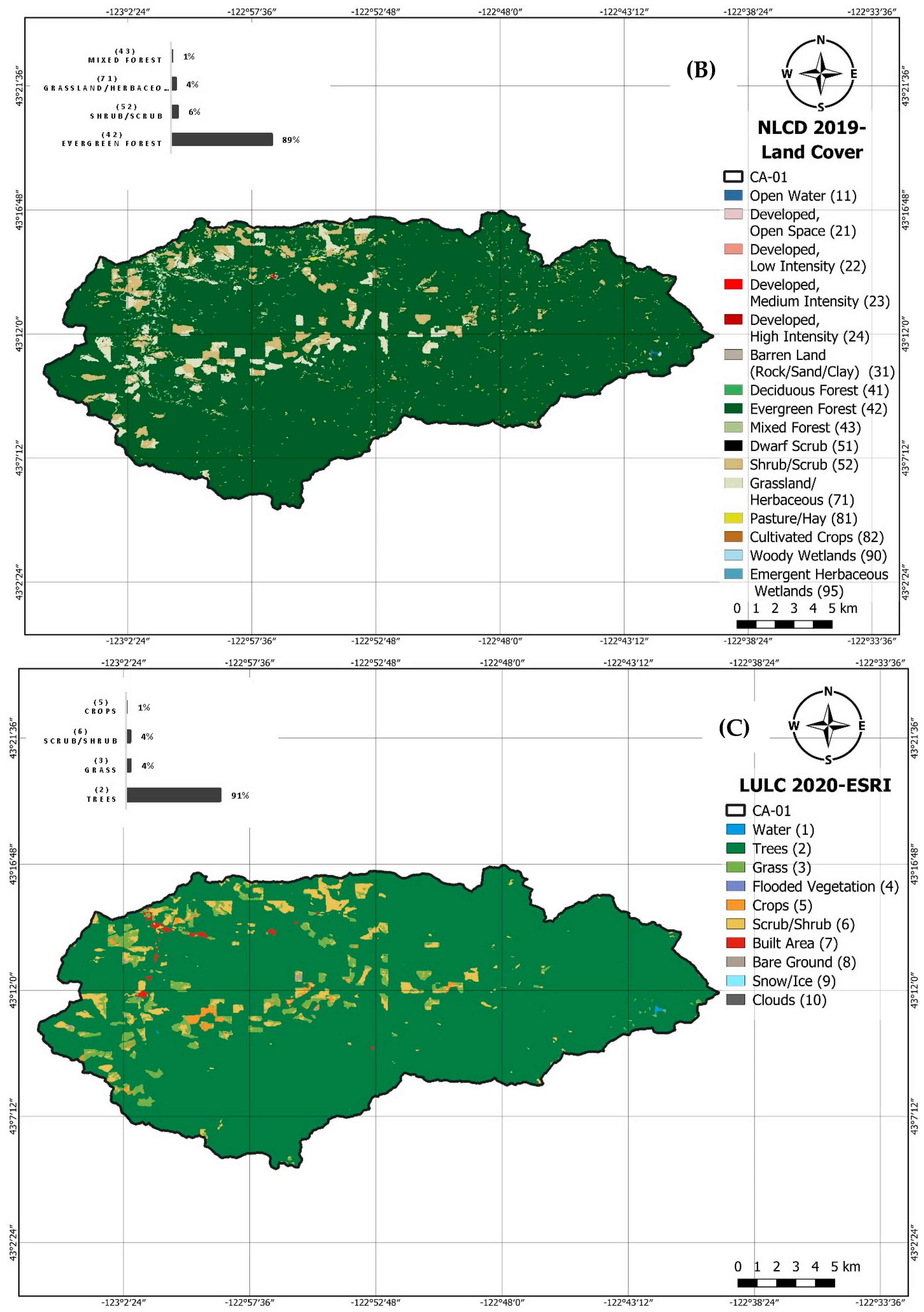
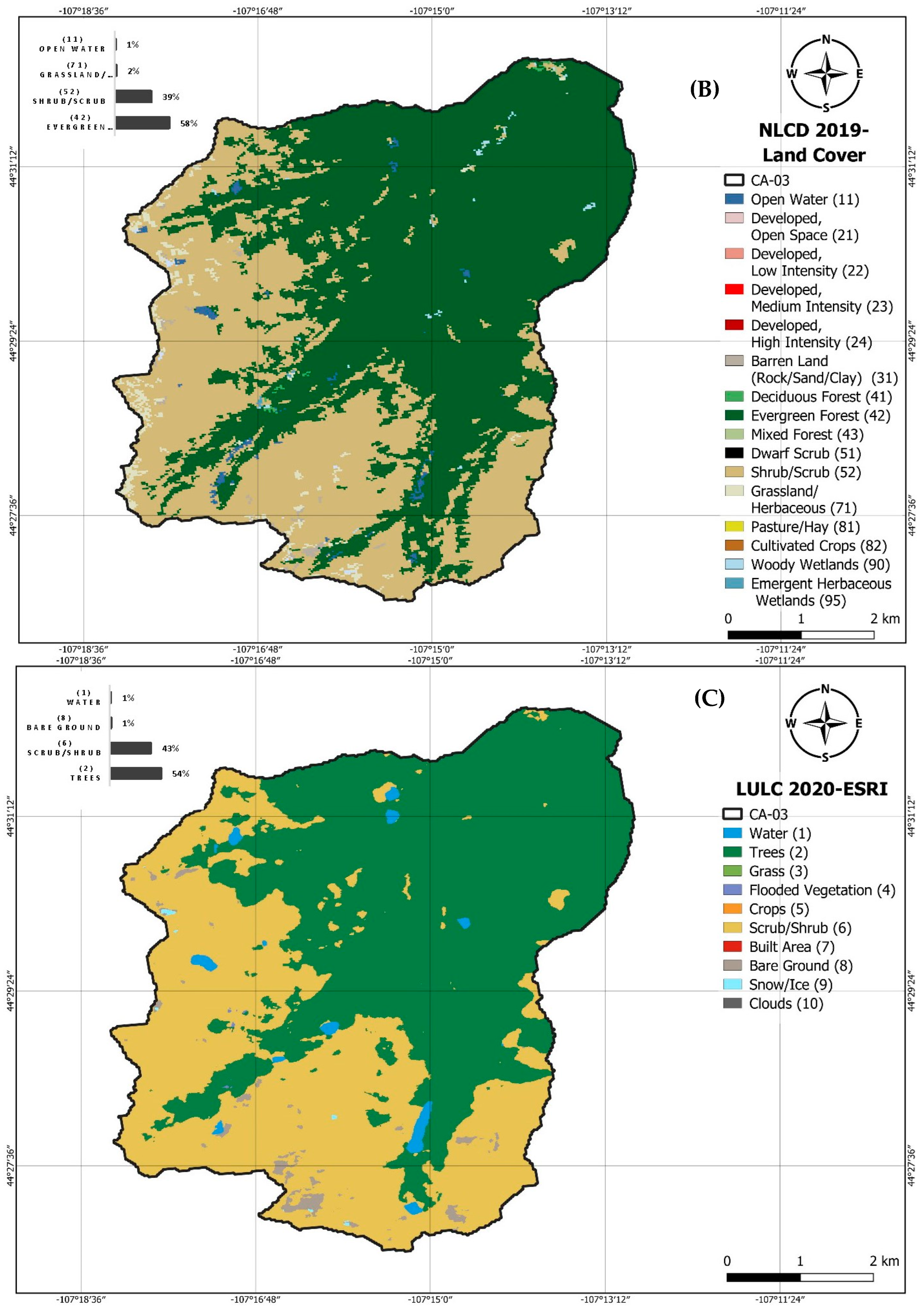
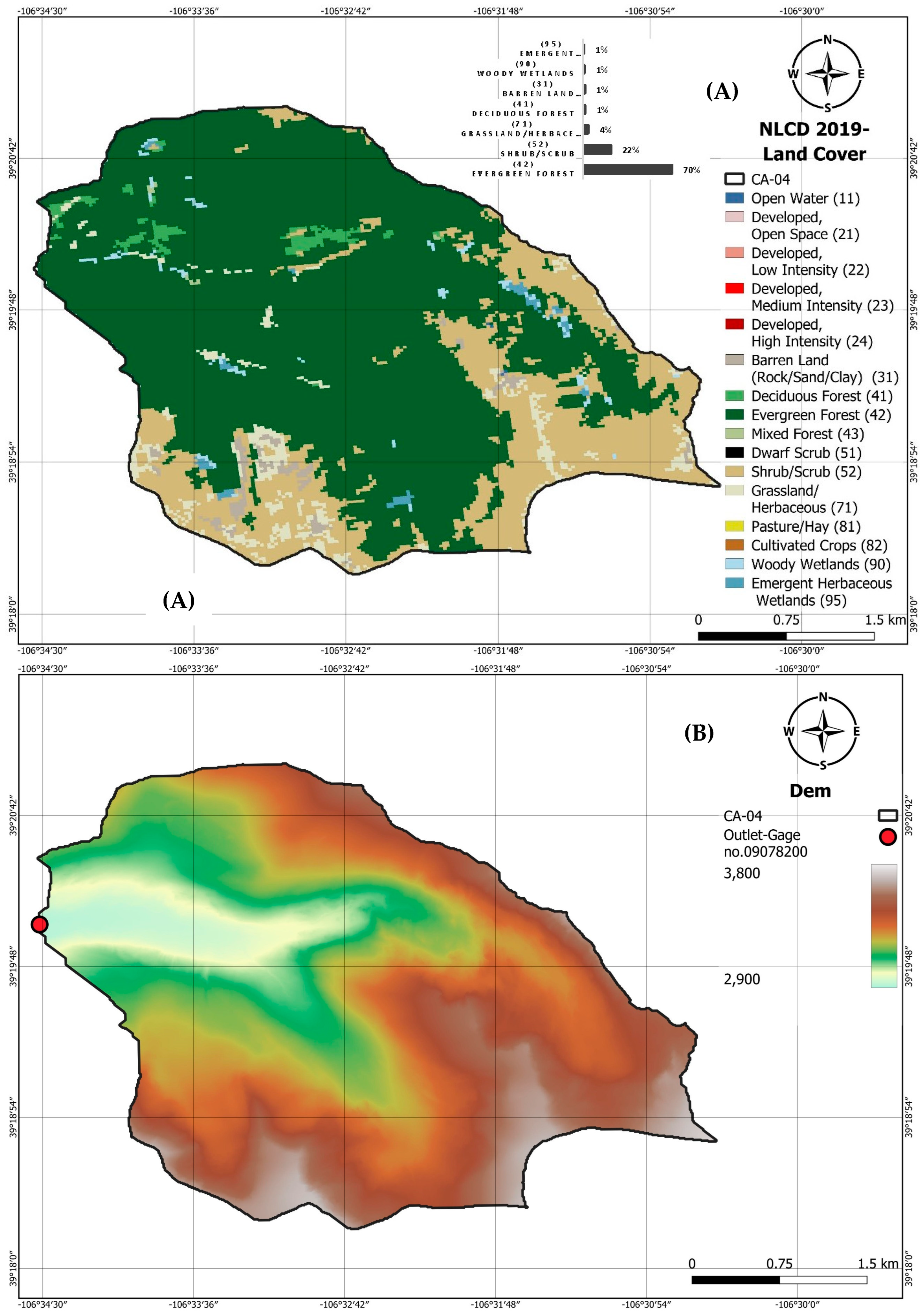
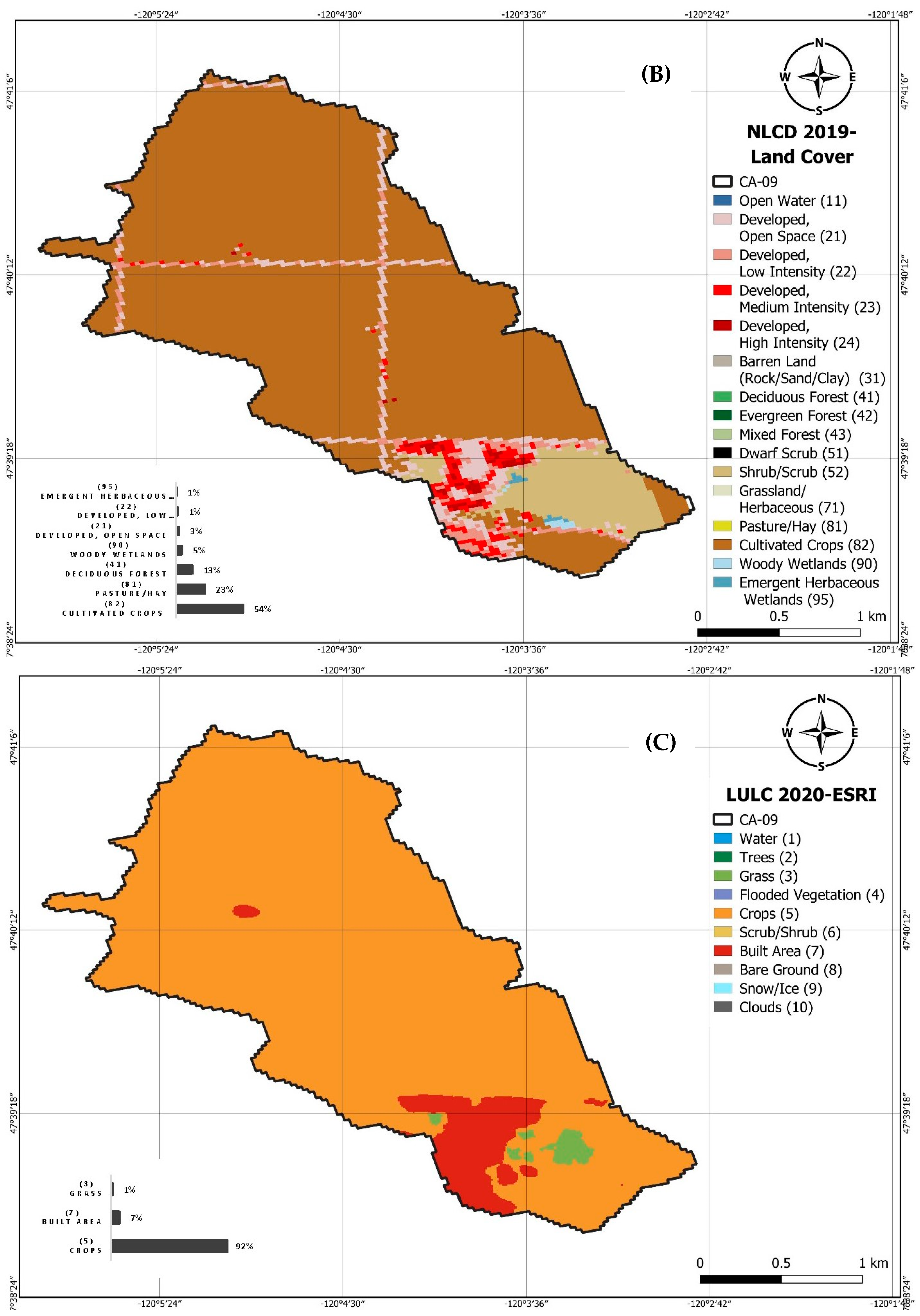
2.1. National Land Cover Database (NLCD 2019)
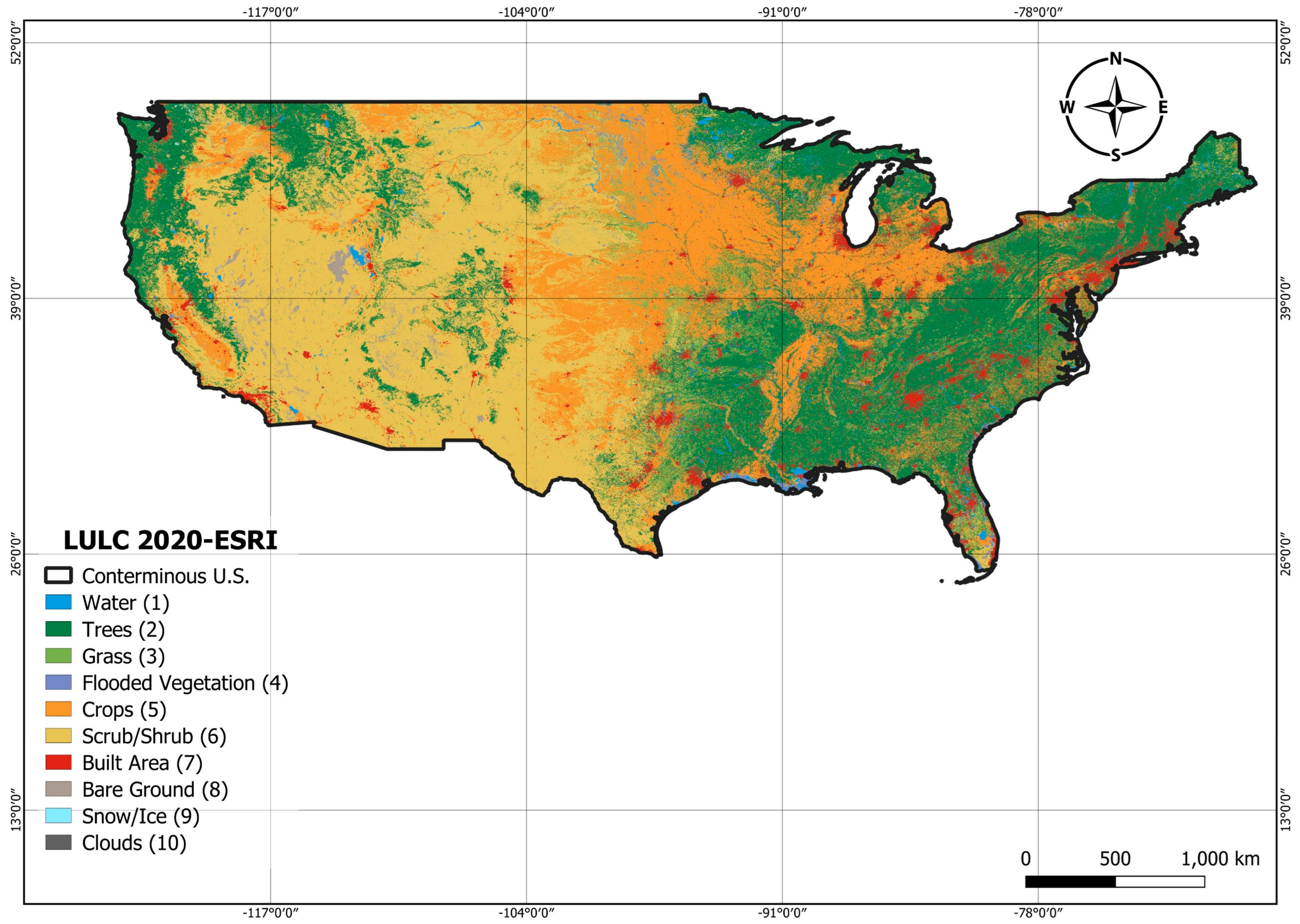
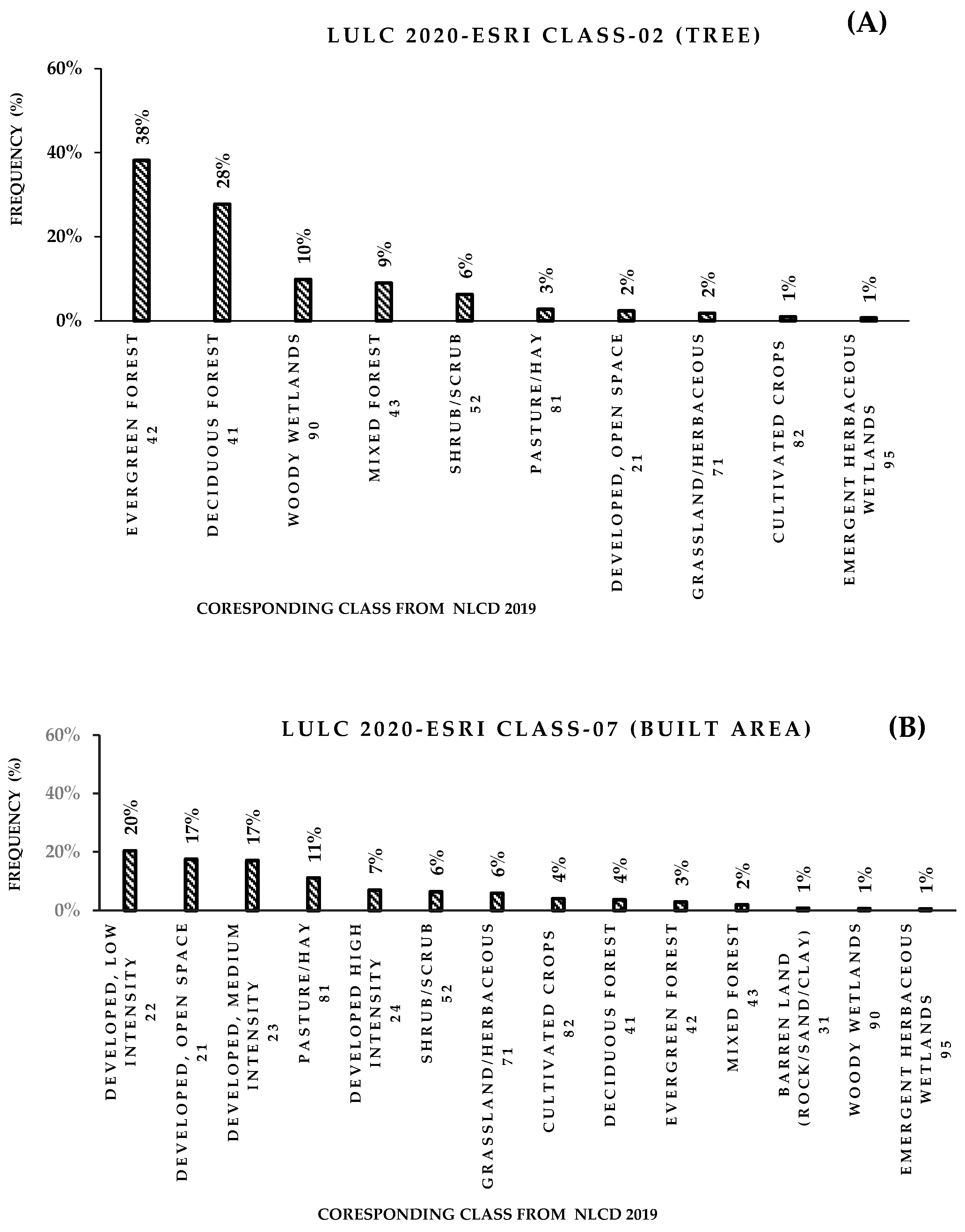
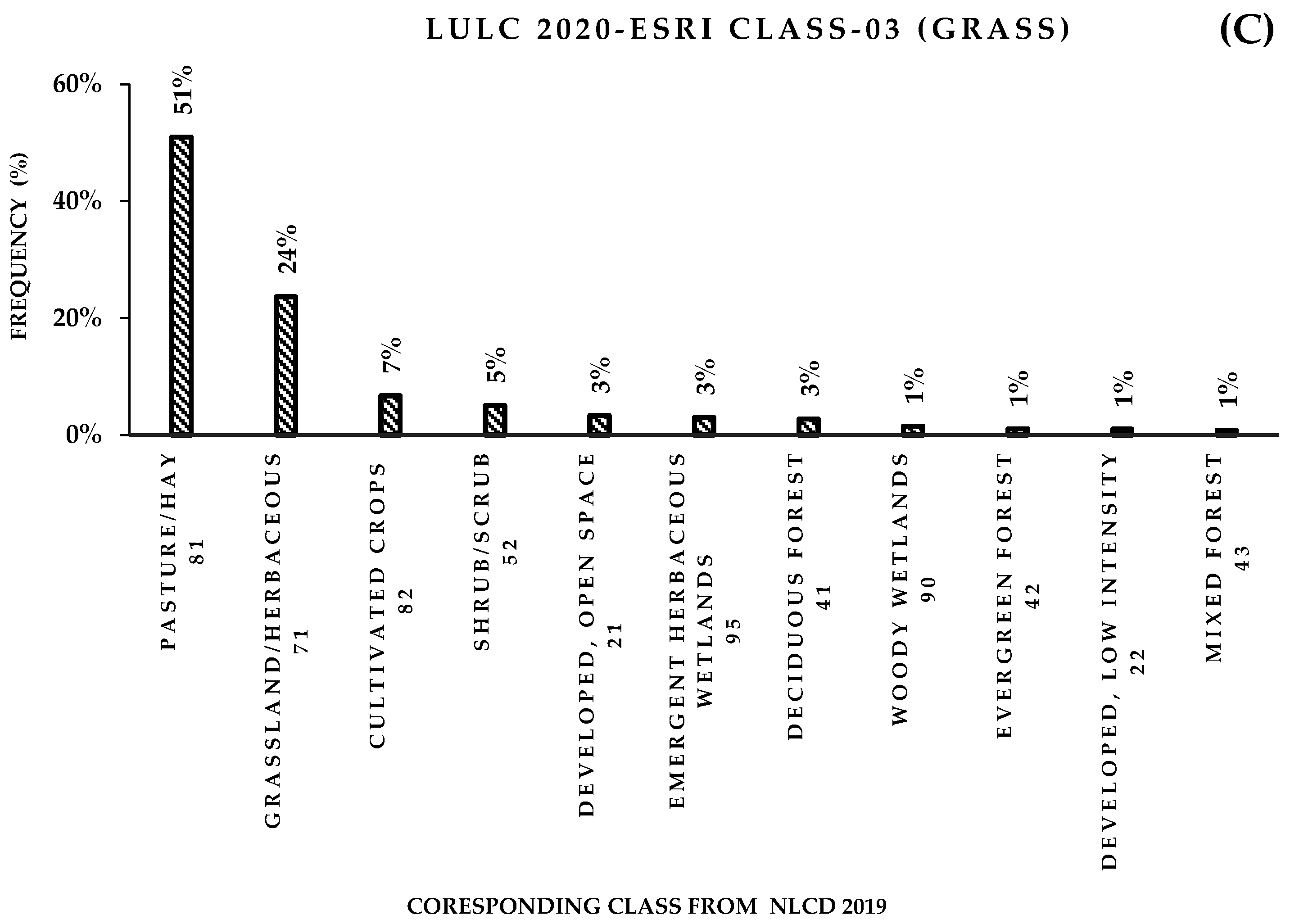
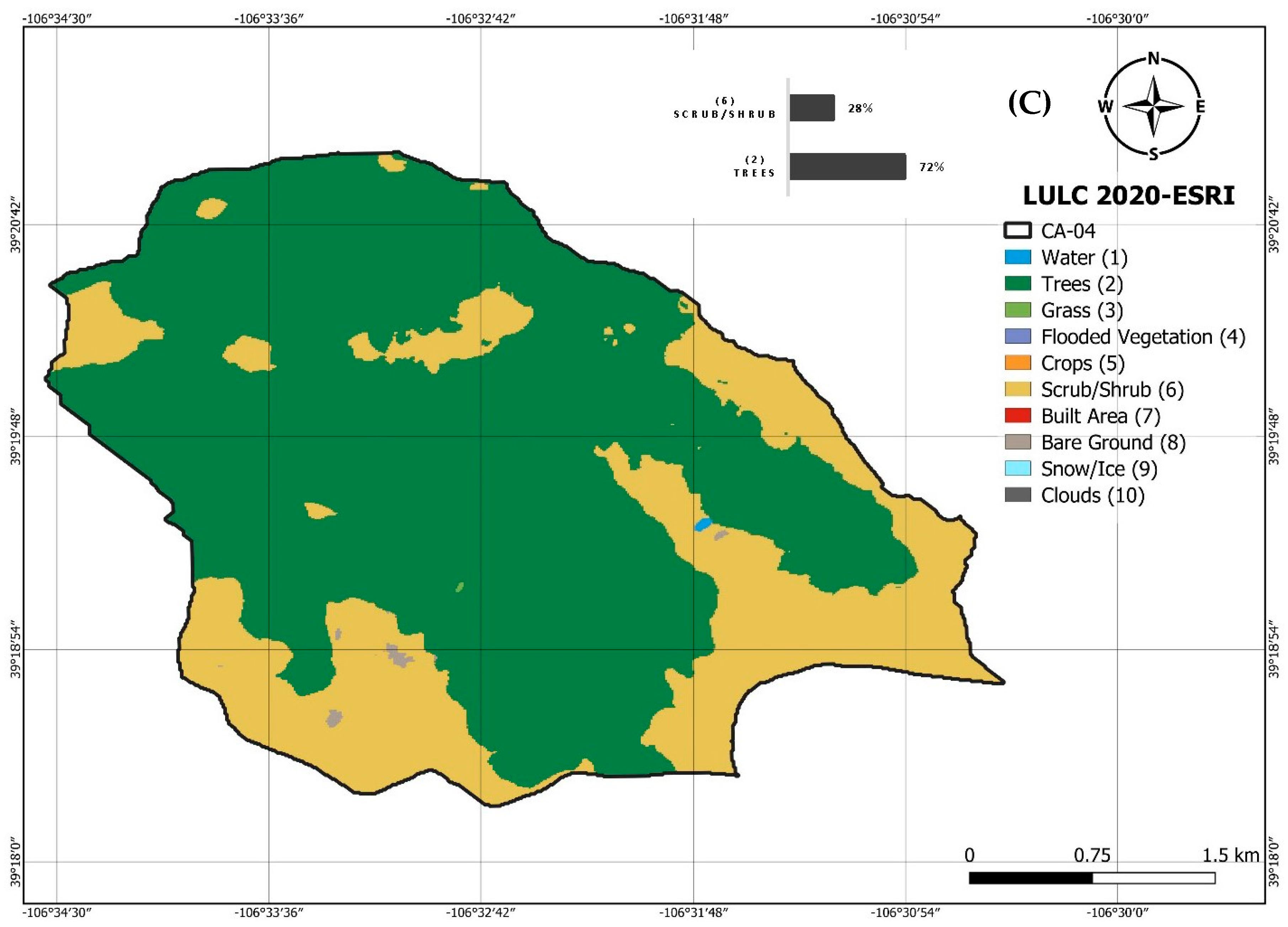
2.2. Environmental Systems Research Institute Land Use/Land CoverDatabase (LULC 2020-ESRI)
2.3. Rainfall and Peak Flow Data
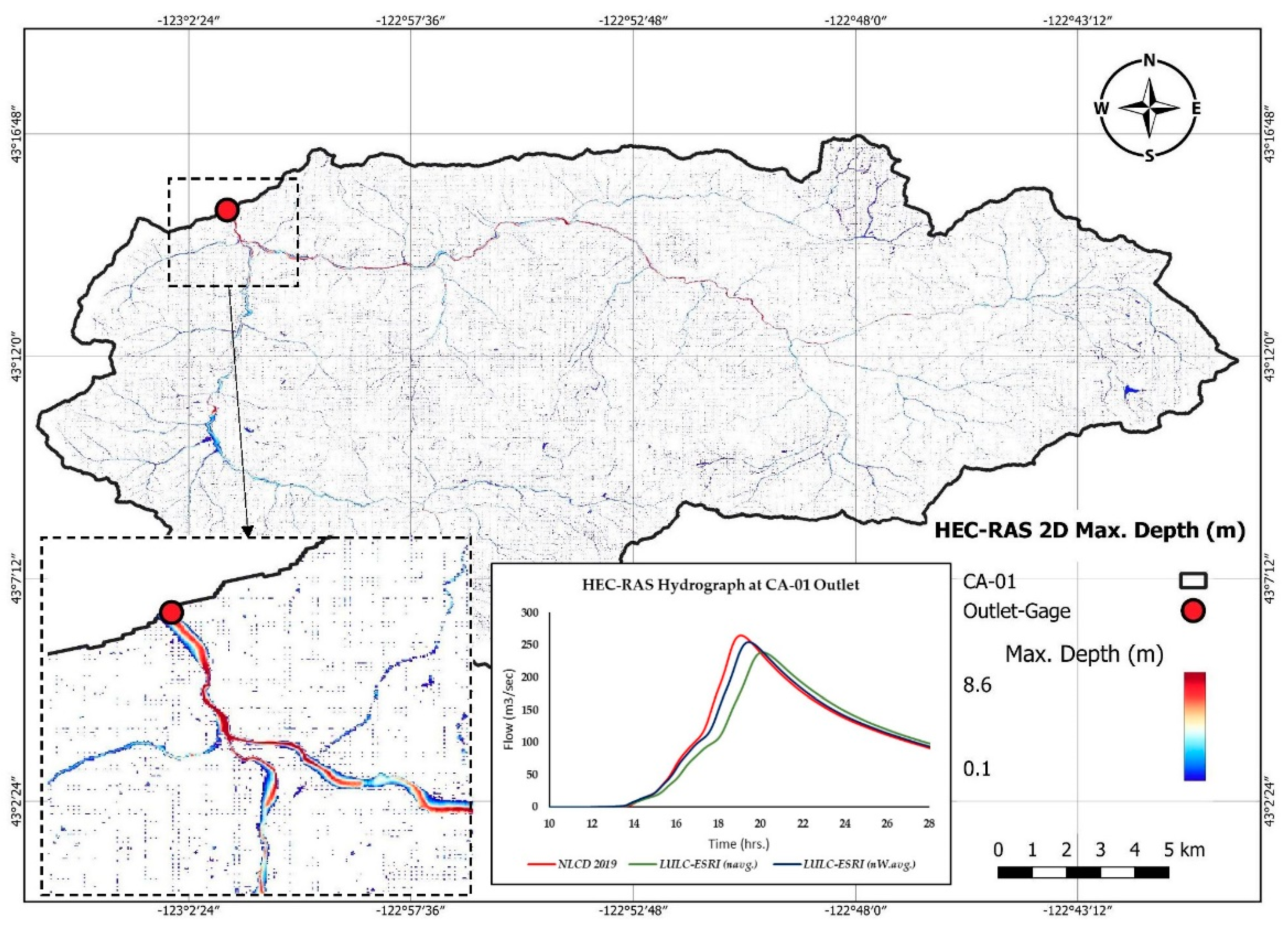
2.4. 2D Hydrodynamic Modeling (HEC-RAS 2D)
2.5. Manning’s Roughness Coefficients by Land Classification
2.6. Research Methodology
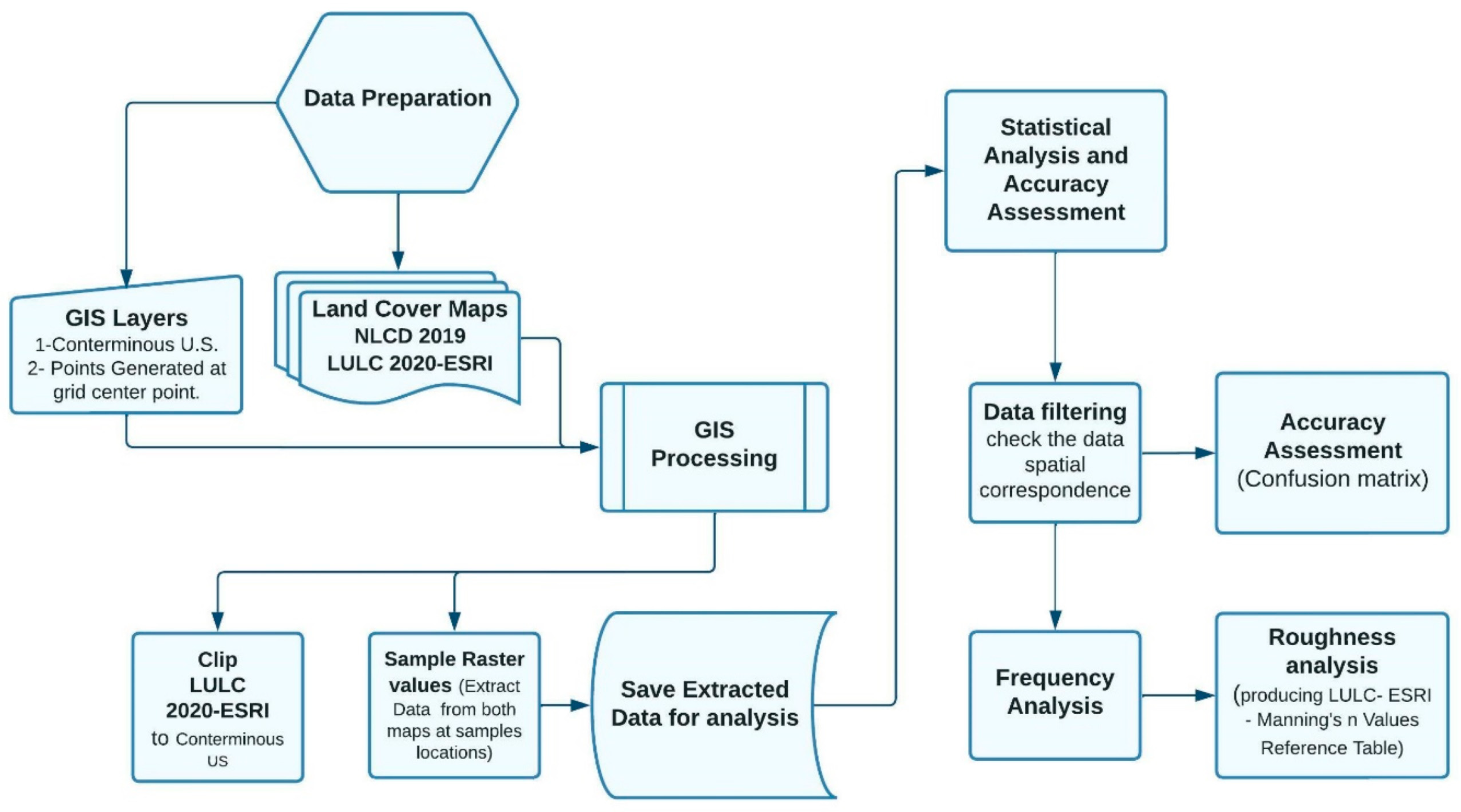
2.6.1. Part 1: Data Preparation, Accuracy Assessment, and Roughness Analysis
- A.
- Average of the most frequent in-class data (Average Manning’s Value)
- Average Manning’s value per LULC 2020-ESRI class.
- : Manning’s value for the repeated class N from NLCD 2019 standard values.
- : Number of most repeated categories.
- B.
- Weighted Average of the most frequent in-class data (W. A. Manning’s Value):
- : Weighted Average Manning’s value per LULC 2020-ESRI class.
- : Manning’s value for the repeated class N from NLCD 2019 standard values.
- : Frequency of points having value of class N from NLCD 2019 standard values.
- : Summation of Frequencies (f)
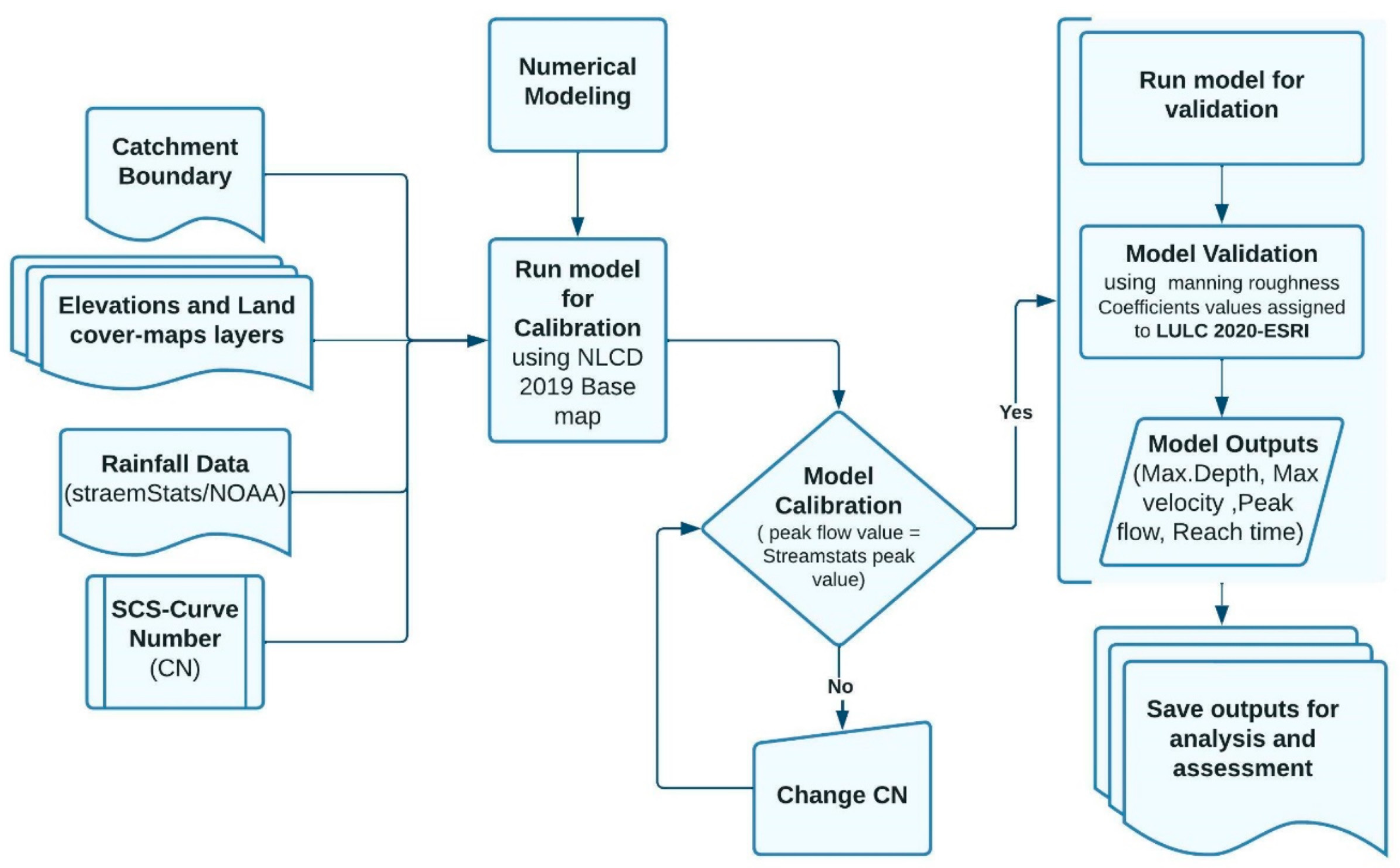
2.6.2. Part 2: Calibration/Validation of the Developed Roughness Maps Using Flood Modeling Application
3. Results
3.1. Data Analysis
3.2. Accuracy Assessment (Confusion Matrix)
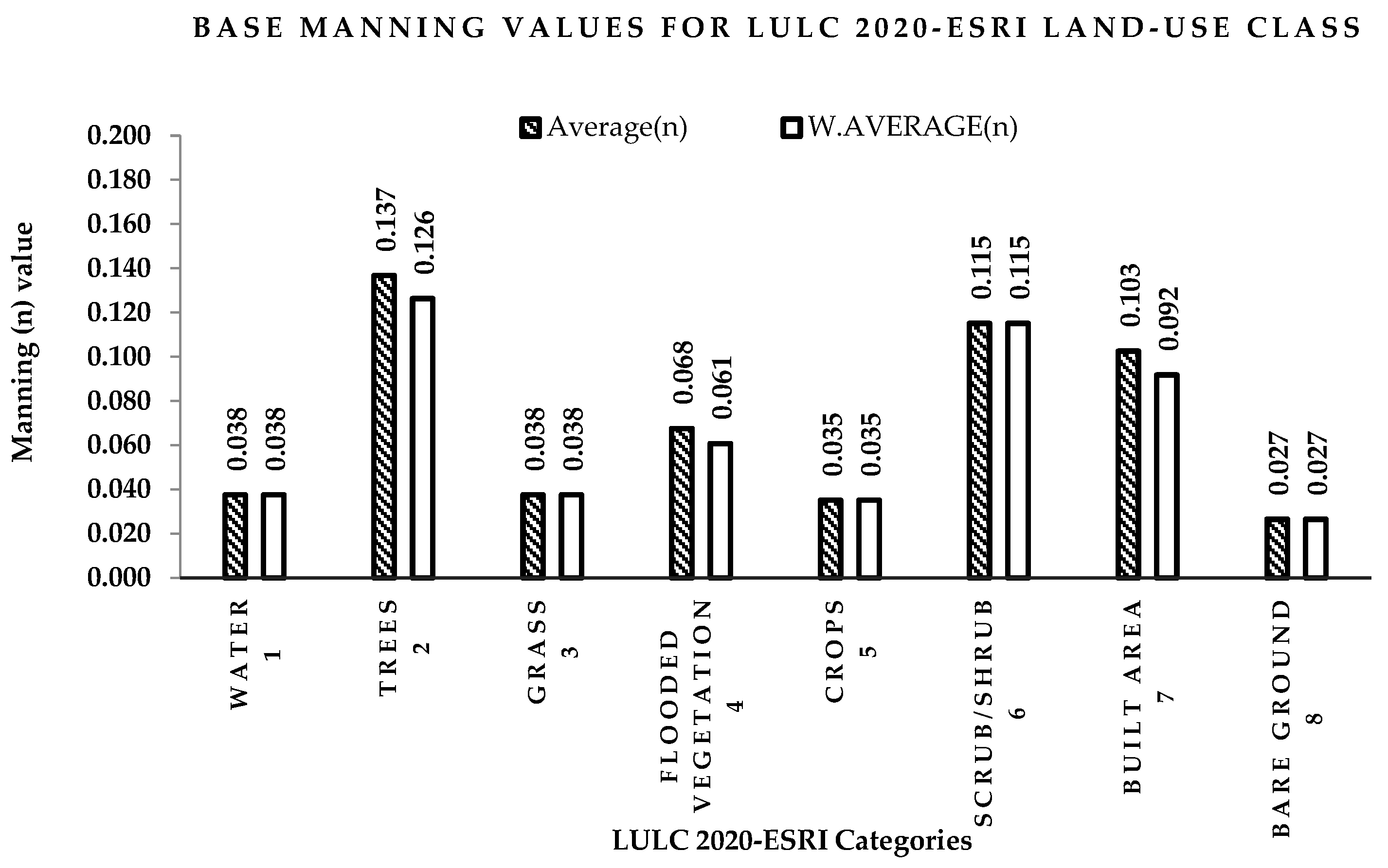
3.3. Surface Roughness Analysis (Manning’s Roughness(n) Values)
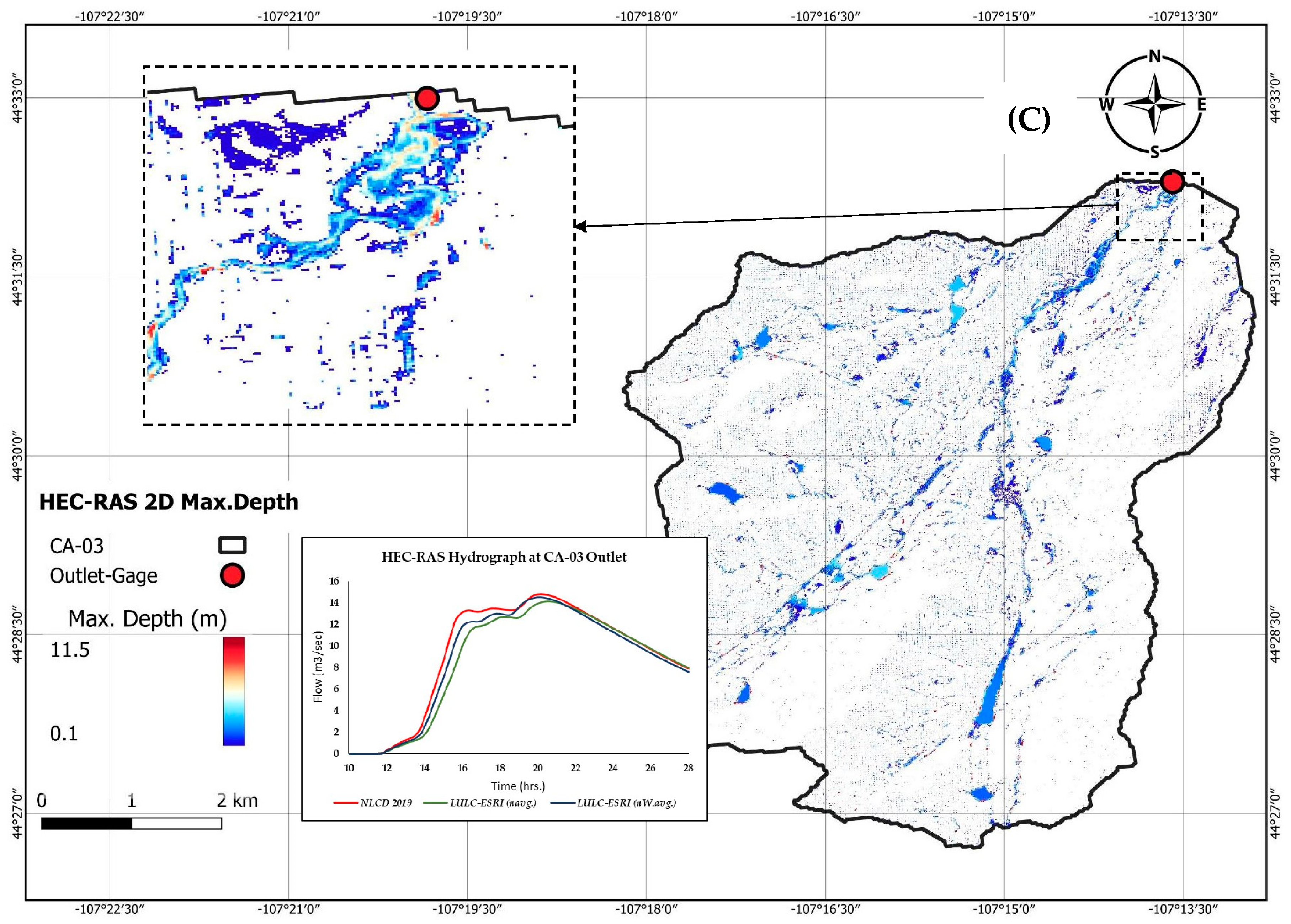
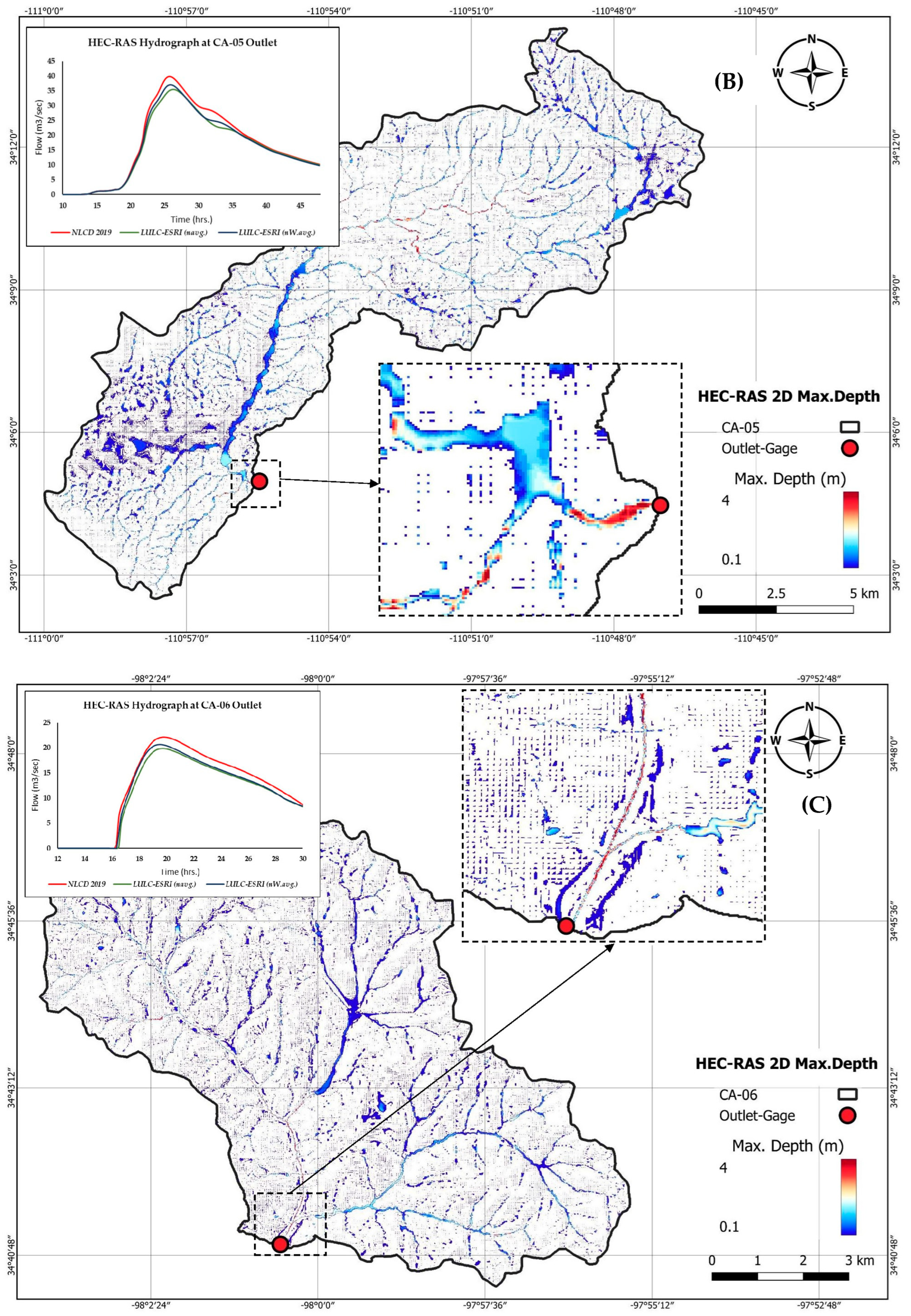
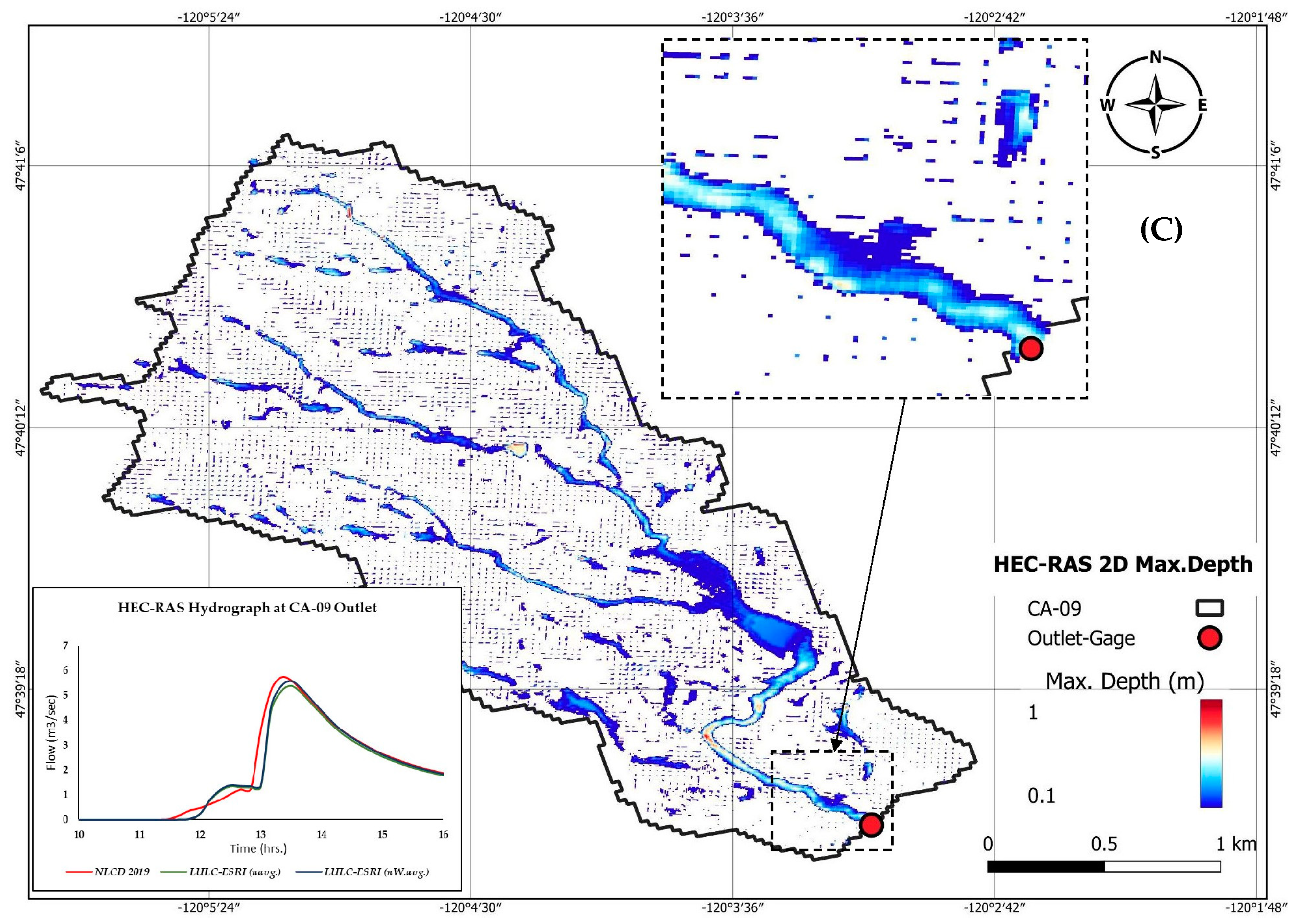
3.4. Hydrodynamic Modeling
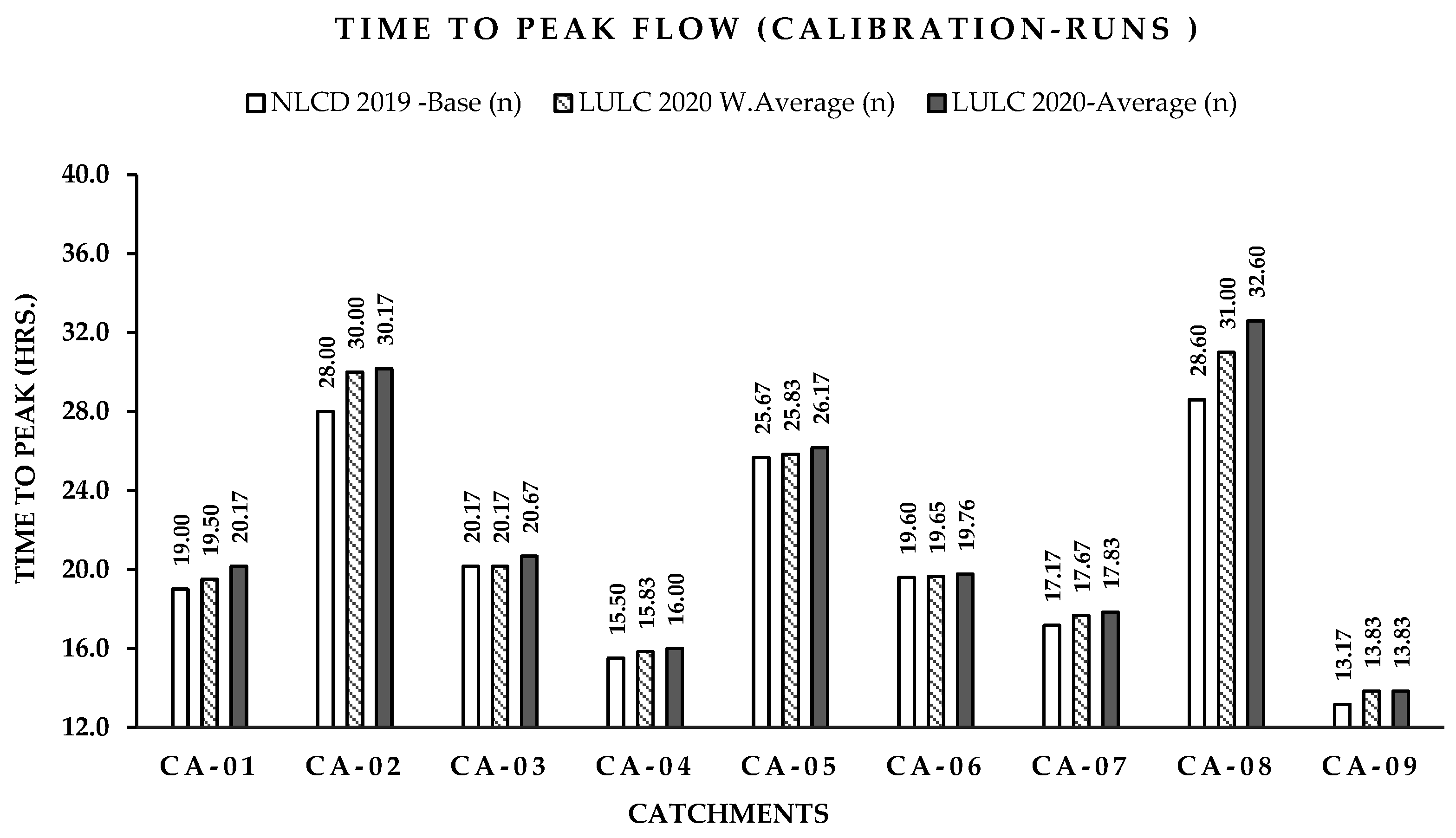
3.4.1. Calibrating HEC-RAS 2D Models
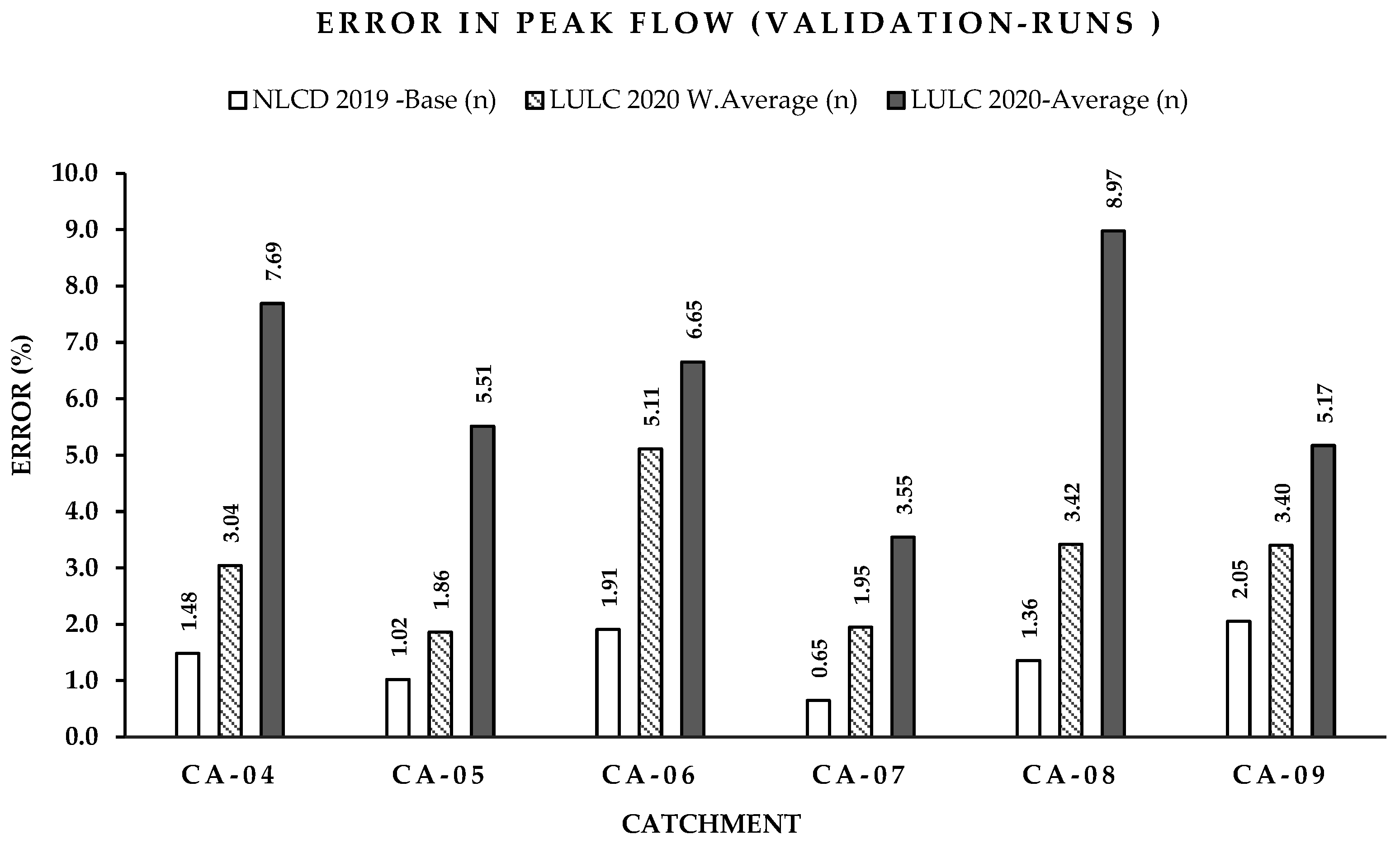
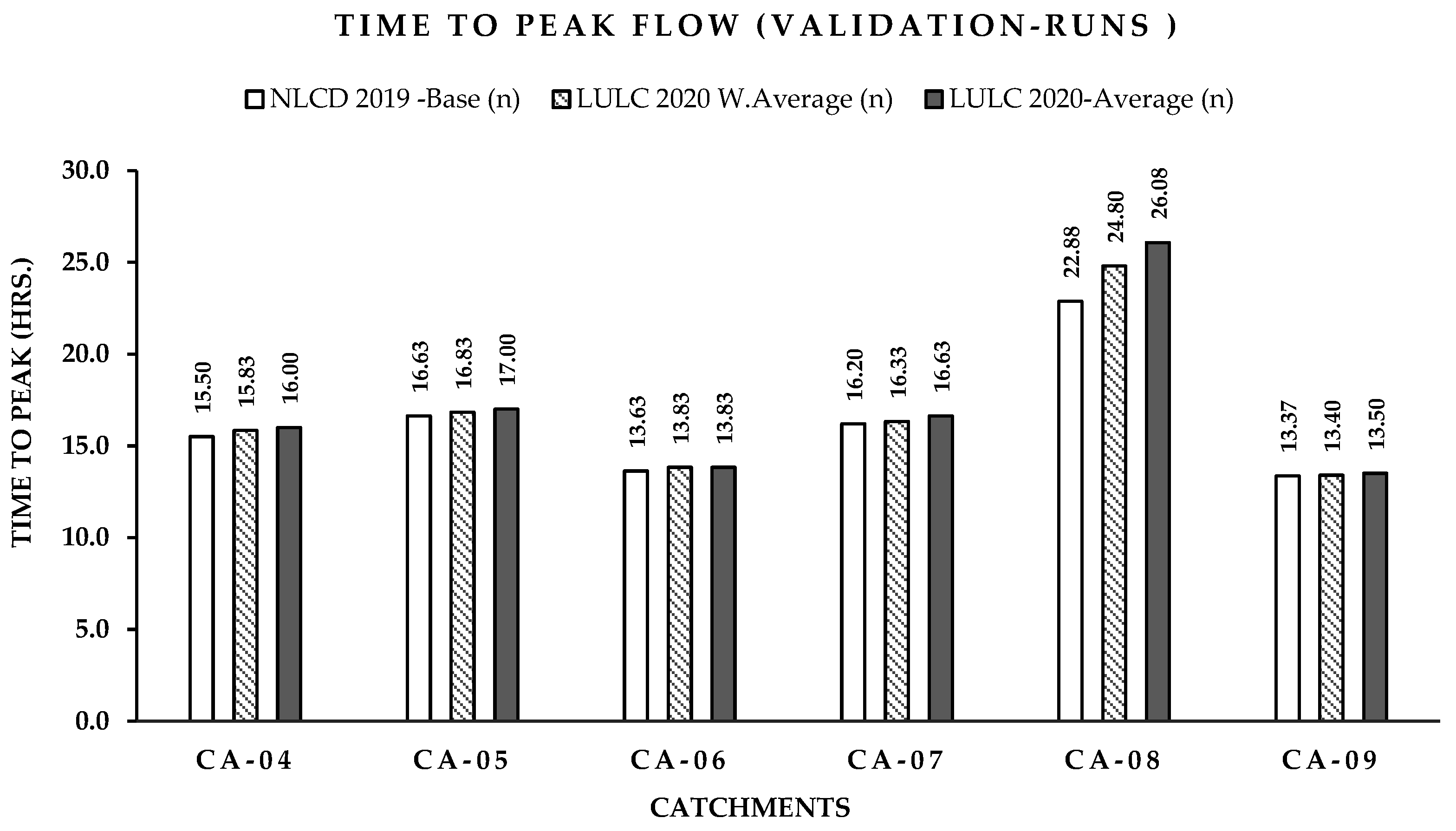
3.4.2. Validation Results: Testing the LULC 2020-ESRI Maps along with the Proposed Roughness Values
4. Discussion
5. Conclusions
- A confusion matrix was used to compare the two publicly available land-use and land-cover datasets for a total of 548,117 sample points in the conterminous United States.
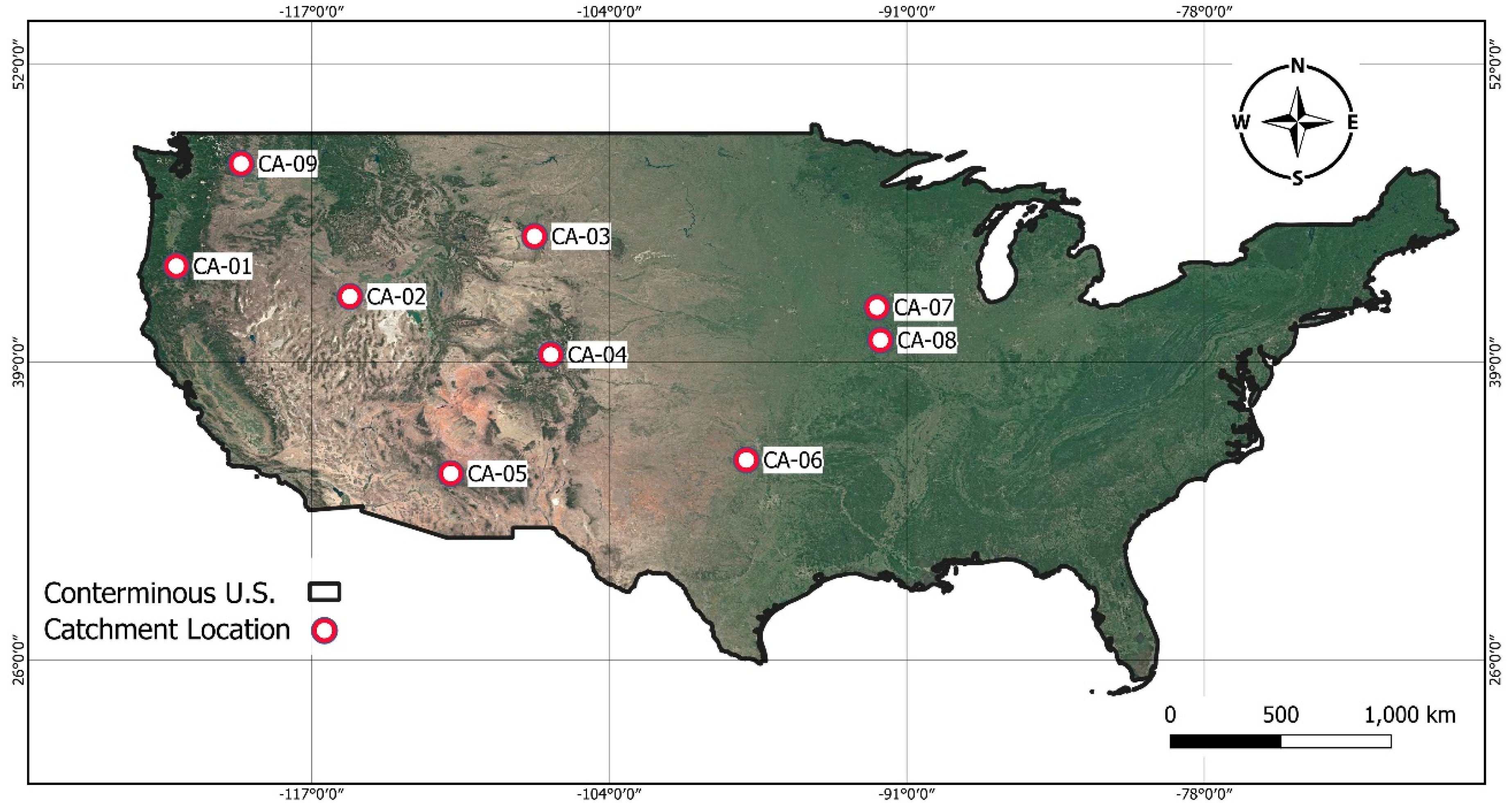
- During the calibration and validation procedures using the HEC-RAS 2D model, the NLCD 2019 dataset was evaluated using the measured peak flows for nine catchments in the conterminous United States with an accepted error in peak flow of 0.42% to a maximum of 3.08%.
- The LULC 2020-ESRI dataset can be used to depict the global coverage with an overall accuracy of 72% compared to the NLCD 2019 dataset, which is consistent with recent scientific studies.
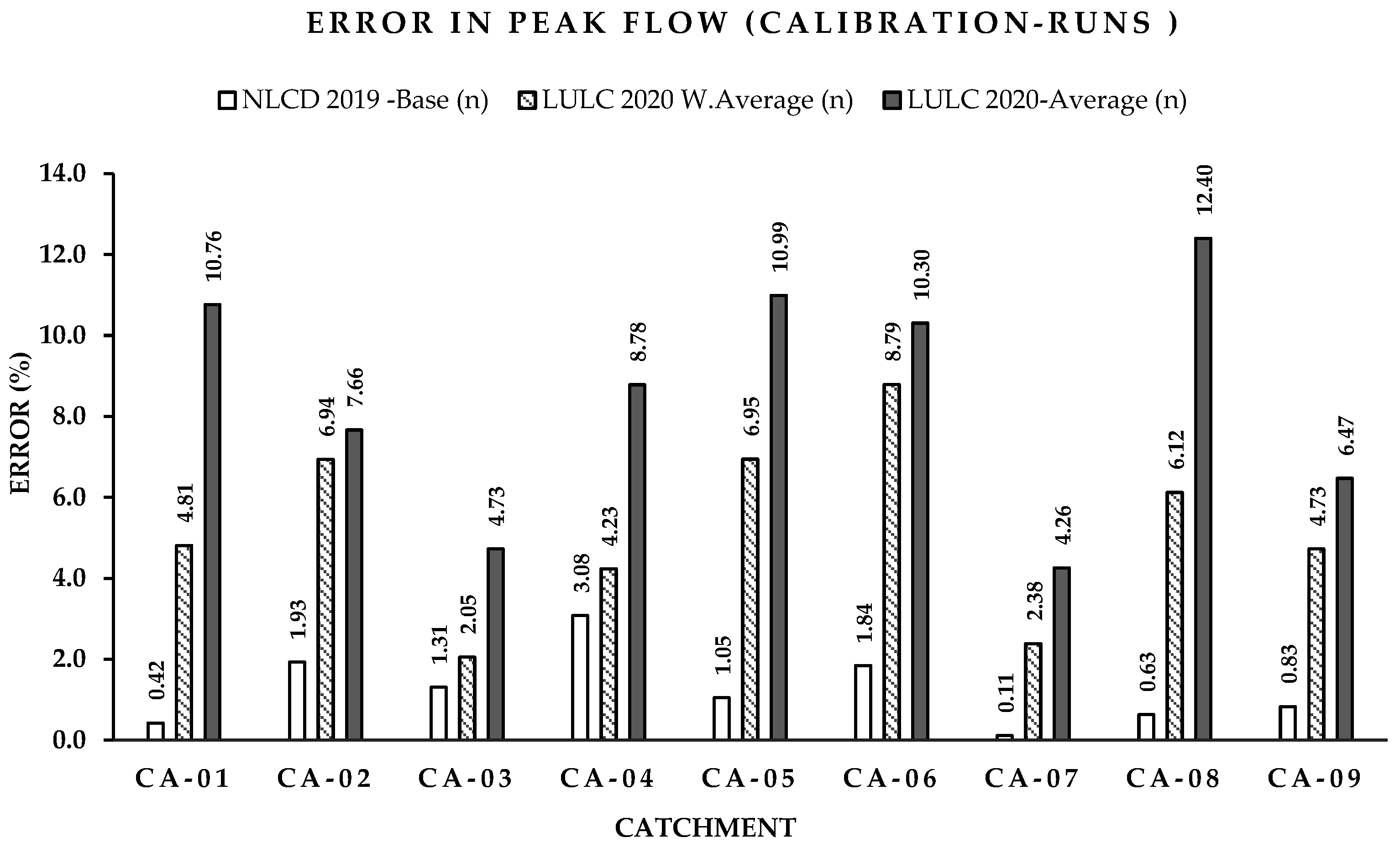
- Compared to the average method, the weighted average approach is the most effective way to determine Manning’s roughness values for the LULC 2020-ESRI dataset.
- Manning’s roughness values were suggested (see Table 10) for the classes in LULC 2020-ESRI to be used as standard reference values for the 2D flood-modeling procedure.
- The suggested Manning’s roughness values for the LULC 2020-ESRI dataset were calibrated and validated against the NLCD 2019 dataset using the HEC-RAS 2D model, and their accuracy was deemed acceptable. The overall RMSE in depth was 2.7 cm, the MAE in depth was 5.32 cm, and the accuracy of the computed peak flow value had an average error of 5.22% (2.0% min. to 8.8% max.).
- Using LULC 2020-ESRI and the suggested Manning’s roughness values (nw.avg) results in lower-magnitude errors for long return periods than for short return periods.
- This work should be updated and modified for any new release of LULC-ESRI or NLCD land use/land cover.
6. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A


















Appendix B






References
- Papaioannou, G.; Vasiliades, L.; Loukas, A.; Aronica, G.T. Probabilistic flood inundation mapping at ungauged streams due to roughness coefficient uncertainty in hydraulic modelling. J. Adv. Geosci. 2017, 44, 23–34. [Google Scholar] [CrossRef] [Green Version]
- Calo, V.M.; Collier, N.; Gegre, M.; Jin, B.; Radwan, H. Gradient-based estimation of Manning’s friction coefficient from noisy data. J. Comput. Appl. Math. 2013, 238, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Abbas, A.S.; Al-Aboode, A.H.; Ibrahim, H.T. Identification of Manning’s Coefficient Using HEC-RAS Model: Upstream Al-Amarah Barrage. J. Eng. 2020, 2020, 6450825. [Google Scholar] [CrossRef] [Green Version]
- Žic, E.; Vranješ, M.; Ožanić, N. Methods of roughness coefficient determination in natural riverbeds. In Proceedings of the International Symposium on Water Management and Hydraulic Engineering, Ohrid, Macedonia, 1–5 September 2009. [Google Scholar]
- HEC-RAS 2D User’s Manual; Developing a Terrain Model and Geospatial Layers; Creating Land Cover, Manning’s n Values; Table 2-1. Available online: https://www.hec.usace.army.mil/confluence/rasdocs/r2dum/latest/developing-a-terrain-model-and-geospatial-layers/creating-land-cover-mannings-n-values-and-impervious-layers (accessed on 15 May 2022).
- Ding, Y.; Jia, Y.; Wang, S.S.Y. Identification of Manning’s roughness coefficients in shallow water flows. J. Hydraul. Eng. 2004, 130, 501–510. [Google Scholar] [CrossRef] [Green Version]
- Ramesh, R.; Datta, B.; Bhallamudi, S.; Narayana, A. Optimal estimation of roughness in open-channel flows. J. Hydraul. Eng. 1997, 126, 299–303. [Google Scholar] [CrossRef]
- Ali, Z.M.D.; Abdul Karim, N.H.; Razi, M.A.M. Study on roughness coefficient at natural channel. In Proceedings of the International Conference on Environment (ICENV 2010), Penang, Malaysia, 26–29 July 2010. [Google Scholar]
- Abdul Hameed, U.H. Determination of manning roughness value for Euphrates River at Al-Falluja barrages using different theories. Iraq Acad. Sci. J. 2010, 2, 25–31. [Google Scholar]
- Parhi, P.K. HEC-RAS model for Manning’s roughness: A case study. Open J. Mod. Hydrol. 2013, 3, 97–101. [Google Scholar] [CrossRef] [Green Version]
- Shamkhi, M.S.; Attab, Z.S. Estimation of Manning’s roughness coefficient for Tigris River by using HEC-RAS model. WASIT J. Eng. Sci. 2018, 6, 90–97. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; Ferraro, D.; Barca, P. Is HEC-RAS 2D accurate enough for storm-event hazard assessment? Lessons learnt from a benchmarking study based on rain-on-grid modelling. J. Hydrol. 2021, 603, 126962. [Google Scholar] [CrossRef]
- Zeiger, S.J.; Hubbart, J.A. Measuring and modeling event-based environmental flows: An assessment of HEC-RAS 2D rain-on-grid simulations. J. Environ. Manag. 2021, 285, 112125. [Google Scholar] [CrossRef]
- Chow, V.T. Open Channel Hydraulics; McGraw-Hill Book Company, Inc.: New York, NY, USA, 1959; pp. 109–113. [Google Scholar]
- Horritt, M.S.; Bates, P.D.; Mattinson, M.J. Effects of mesh resolution and topographic representation in 2D finite volume models of shallow water fluvial flow. J. Hydrol. 2006, 329, 306–314. [Google Scholar] [CrossRef]
- Liu, Z.; Merwade, V.; Jafarzadegan, K. Investigating the role of model structure and surface roughness in generating flood inundation extents using one-and two-dimensional hydraulic models. J. Flood Risk Manag. 2019, 12, e12347. [Google Scholar] [CrossRef] [Green Version]
- Lim, N.J.C.; Brandt, S.A. Flood map boundary sensitivity due to combined effects of DEM resolution and roughness in relation to model performance. Geomat. Nat. Hazards Risk 2019, 10, 1613–1647. [Google Scholar] [CrossRef] [Green Version]
- Marks, K.; Bates, P. Integration of high-resolution topographic data with floodplain flow models. Hydrol. Processes 2000, 14, 2109–2122. [Google Scholar] [CrossRef]
- Morsy, M.M.; Lerma, N.R.; Shen, Y.; Goodall, J.L.; Huxley, C.; Sadler, J.M.; Voce, D.; O’Neil, G.L.; Maghami, I.; Zahura, F.T. Impact of Geospatial Data Enhancements for Regional-Scale 2D Hydrodynamic Flood Modeling: Case Study for the Coastal Plain of Virginia. J. Hydrol. Eng. 2021, 26, 05021002. [Google Scholar] [CrossRef]
- Merwade, V.; Olivera, F.; Arabi, M.; Edleman, S. Uncertainty in flood inundation mapping: Current issues and future directions. J. Hydrol. Eng. 2008, 13, 608–620. [Google Scholar] [CrossRef] [Green Version]
- Yalcin, E. Assessing the impact of topography and land cover data resolutions on two-dimensional HEC-RAS hydrodynamic model simulations for urban flood hazard analysis. Nat. Hazards 2020, 101, 995–1017. [Google Scholar] [CrossRef]
- Buchhorn, M.; Lesiv, M.; Tsendbazar, N.E.; Herold, M.; Bertels, L.; Smets, B. Copernicus global land cover layers—Collection 2. Remote Sens. 2020, 12, 1044. [Google Scholar] [CrossRef] [Green Version]
- Pande, C.B.; Moharir, K.N.; Khadri, S.F.R.; Patil, S. Study of land use classification in an arid region using multispectral satellite images. Appl. Water Sci. 2018, 8, 123. [Google Scholar] [CrossRef] [Green Version]
- Cole, L.J.; Kleijn, D.; Dicks, L.V.; Stout, J.C.; Potts, S.G.; Albrecht, M.; Balzan, M.V.; Bartomeus, I.; Bebeli, P.J.; Bevk, D.; et al. A critical analysis of the potential for E.U. Common Agricultural Policy measures to support wild pollinators on farmland. J. Appl. Ecol. 2020, 57, 681–694. [Google Scholar] [CrossRef]
- Zhu, Z.; Wulder, M.A.; Roy, D.P.; Woodcock, C.E.; Hansen, M.C.; Radeloff, V.C.; Healey, S.P.; Schaaf, C.; Hostert, P.; Strobl, P.; et al. Benefits of the free and open Landsat data policy. Remote Sens. Environ. 2019, 224, 382–385. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Pande, C.B. Land Use/Land Cover and Change Detection mapping in Rahuri watershed area (MS), India using the Google Earth Engine and Machine Learning Approach. Geocarto Int. 2022, 1–15. [Google Scholar] [CrossRef]
- Pande, C.B.; Moharir, K.N.; Singh, S.K.; Varade, A.M.; Elbeltagi, A.; Khadri, S.F.R.; Choudhari, P. Estimation of crop and forest biomass resources in a semi-arid region using satellite data and GIS. J. Saudi Soc. Agric. Sci. 2021, 20, 302–311. [Google Scholar] [CrossRef]
- Pande, C.B.; Moharir, K.N.; Khadri, S.F.R. Assessment of land-use and land-cover changes in Pangari watershed area (MS), India, based on the remote sensing and GIS techniques. Appl. Water Sci. 2021, 11, 1–12. [Google Scholar] [CrossRef]
- Alam, A.; Bhat, M.S.; Maheen, M. Using Landsat satellite data for assessing the land use and land cover change in Kashmir valley. GeoJournal 2020, 85, 1529–1543. [Google Scholar] [CrossRef] [Green Version]
- Dewitz, J. National Land Cover Database (NLCD) 2019 Products [Dataset]; US Geological Survey: Sioux Falls, SD, USA, 2021. Available online: https://data.usgs.gov/datacatalog/data/USGS:60cb3da7d34e86b938a30cb9 (accessed on 9 March 2022).
- Wickham, J.; Stehman, S.V.; Sorenson, D.G.; Gass, L.; Dewitz, J.A. Thematic accuracy assessment of the NLCD 2016 land cover for the conterminous United States. Remote Sens. Environ. 2021, 257, 112357. [Google Scholar] [CrossRef]
- Karra, K.; Kontgis, C.; Statman-Weil, Z.; Mazzariello, J.C.; Mathis, M.; Brumby, S.P. Global land use/land cover with Sentinel 2 and deep learning. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 4704–4707. [Google Scholar]
- Huan, V.D. Accuracy assessment of land use land cover LULC 2020 (ESRI) data in Con Dao Island, Ba Ria–Vung Tau province, Vietnam. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2022; Volume 1028, p. 012010. [Google Scholar]
- Venter, Z.S.; Barton, D.N.; Chakraborty, T.; Simensen, T.; Singh, G. Global 10 m Land Use Land Cover Datasets: A Comparison of Dynamic World, World Cover and Esri Land Cover. Remote Sens. 2022, 14, 4101. [Google Scholar] [CrossRef]
- Kalyanapu, A.J.; Burian, S.J.; McPherson, T.N. Effect of land use-based surface roughness on hydrologic model output. J. Spat. Hydrol. 2009, 9, 51–71. [Google Scholar]
- Ries, K.G., III; Newson, J.K.; Smith, M.J.; Guthrie, J.D.; Steeves, P.A.; Haluska, T.L.; Kolb, K.R.; Thompson, R.F.; Santoro, R.D.; Vraga, H.W. StreamStats, version 4; US Geological Survey: Reston, VA, USA, 2017; Volume 3046, p. 4. [Google Scholar] [CrossRef] [Green Version]
- Bonnin, G.M.; Martin, D.; Lin, B.; Parzybok, T.; Yekta, M.; Riley, D. Precipitation-Frequency Atlas of the United States: NOAA Atlas 14, version 4; NOAA, National Weather Service: Silver Spring, MD, USA, 2006; Volume 1. [Google Scholar]
- Brunner, G.W. HEC-RAS River Analysis System 2D Modeling User’s Manual; U.S. Army Corps of Engineers—Hydrologic Engineering Center: Washington, DC, USA, 2016; pp. 1–171. [Google Scholar]
- Quirogaa, V.M.; Kurea, S.; Udoa, K.; Manoa, A. Application of 2D numerical simulation for the analysis of the February 2014 Bolivian Amazonia flood: Application of the new HEC-RAS version 5. Ribagua 2016, 3, 25–33. [Google Scholar] [CrossRef] [Green Version]
- David, A.; Schmalz, B. A systematic analysis of the interaction between rain-on-grid-simulations and spatial resolution in 2D hydrodynamic modeling. Water 2021, 13, 2346. [Google Scholar] [CrossRef]
- Soil Conservation Service (SCS, U). National Engineering Handbook, Section 4: Hydrology; U.S. Soil Conservation Service, USDA: Washington, DC, USA, 1985. Available online: https://directives.sc.egov.usda.gov/OpenNonWebContent.aspx?content=18393.wba (accessed on 10 March 2022).
- Costabile, P.; Costanzo, C.; Ferraro, D.; Macchione, F.; Petaccia, G. Performances of the new HEC-RAS version 5 for 2-D hydrodynamic-based rainfall-runoff simulations at basin scale: Comparison with a state-of-the art model. Water 2020, 12, 2326. [Google Scholar] [CrossRef]
- Brown, C.F.; Brumby, S.P.; Guzder-Williams, B.; Birch, T.; Hyde, S.B.; Mazzariello, J.; Czerwinski, W.; Pasquarella, V.J.; Haertel, R.; Ilyushchenko, S.; et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci. Data 2022, 9, 251. [Google Scholar] [CrossRef]
- U.S. Geological Survey. USGS 3D Elevation Program Digital Elevation Model. 2019. Available online: https://elevation.nationalmap.gov/arcgis/rest/services/3DEPElevation/ImageServer (accessed on 20 March 2022).
- Hariri, S.; Weill, S.; Gustedt, J.; Charpentier, I. A balanced watershed decomposition method for rain-on-grid simulations in HEC-RAS. J. Hydroinform. 2022, 24, 315–332. [Google Scholar] [CrossRef]
- Bessar, M.A.; Matte, P.; Anctil, F. Uncertainty analysis of a 1d river hydraulic model with adaptive calibration. Water 2020, 12, 561. [Google Scholar] [CrossRef]
- Cronshey, R. Urban Hydrology for Small Watersheds; U.S. Dept. of Agriculture, Soil Conservation Service, Engineering Division: Washington, DC, USA, 1986.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NLCD Value | Description | Detailed Description |
|---|---|---|
| 95 | Emergent Herbaceous Wetlands | Areas where perennial herbaceous vegetation accounts for more than 80% of vegetative cover and the soil or substrate is covered with water or periodically saturated with water. |
| 90 | Woody Wetlands | Areas where forest or shrub land vegetation accounts for greater than 20% of vegetative cover and the soil or substrate is periodically saturated with or covered with water. |
| 82 | Cultivated Crops | Areas used for the production of annual crops, such as corn, soybeans, vegetables, tobacco, and cotton, and also perennial woody crops such as orchards and vineyards. Crop vegetation accounts for greater than 20% of total vegetation. This class also includes all land being actively tilled. |
| 81 | Pasture/Hay | Areas of grasses, legumes, grass-legume mixtures planted for livestock grazing or the production of seed or hay crops, typically on a perennial cycle. Pasture/hay vegetation accounts for greater than 20% of total vegetation. |
| 71 | Grassland/Herbaceous | Areas dominated by gramanoid or herbaceous vegetation, generally greater than 80% of total vegetation. These areas are not subject to intensive management such as tilling, but can be utilized for grazing. |
| 52 | Shrub/Scrub | Areas dominated by shrubs; less than 5 m tall with shrub canopy typically greater than 20% of total vegetation. This class includes true shrubs, young trees in an early successional stage or trees stunted from environmental conditions. |
| 51 | Dwarf Scrub | Alaska only areas dominated by shrubs less than 20 cm tall with shrub canopy typically greater than 20% of total vegetation. his type is often co-associated with grasses, sedges, herbs, and non-vascular vegetation. |
| 43 | Mixed Forest | Areas dominated by trees generally greater than 5 m tall, and greater than 20% of total vegetation cover. Neither deciduous nor evergreen species are greater than 75% of total tree cover. |
| 42 | Evergreen Forest | Areas dominated by trees generally greater than 5 m tall, and greater than 20% of total vegetation cover. More than 75% of the tree species maintain their leaves all year. Canopy is never without green foliage. |
| 41 | Deciduous Forest | Areas dominated by trees generally greater than 5 m tall, and greater than 20% of total vegetation cover. More than 75% of the tree species shed foliage simultaneously in response to seasonal change. |
| 31 | Barren Land (Rock/Sand/Clay) | Areas of bedrock, desert pavement, scarps, talus, slides, volcanic material, glacial debris, sand dunes, strip mines, gravel pits and other accumulations of earthen material. Generally, vegetation accounts for less than 15% of total cover. |
| 24 | Developed, High Intensity | Highly developed areas where people reside or work in high numbers. Examples include apartment complexes, row houses and commercial/industrial. Impervious surfaces account for 80% to 100% of the total cover. |
| 23 | Developed, Medium Intensity | areas with a mixture of constructed materials and vegetation. Impervious surfaces account for 50% to 79% of the total cover. These areas most commonly include single-family housing units. |
| 22 | Developed, Low Intensity | areas with a mixture of constructed materials and vegetation. Impervious surfaces account for 20% to 49% percent of total cover. These areas most commonly include single-family housing units. |
| 21 | Developed, Open Space | areas with a mixture of some constructed materials, but mostly vegetation in the form of lawn grasses. Impervious surfaces account for less than 20% of total cover. These areas most commonly include large-lot single-family housing units, parks, golf courses, and vegetation planted in developed settings for recreation, erosion control, or aesthetic purposes. |
| 11 | Open Water | Areas of open water, generally with less than 25% cover of vegetation or soil. |
| LULC Value | Description | Detailed Description |
|---|---|---|
| 1 | Water | Examples of areas having year-round water include rivers, ponds, lakes, oceans, and flooded salt plains. These areas may not include areas with intermittent or ephemeral water, little to no sparse vegetation, no rock outcrops, and no built-up features such as docks. |
| 2 | Trees | Any notable grouping of tall (15 m or higher) dense vegetation, usually with a closed or dense canopy; examples include wooded vegetation, dense tall vegetation groups in savannas, plantations, swamps, or mangroves (dense/tall vegetation with ephemeral water or canopy too thick to detect water underneath). |
| 3 | Grass | Examples include natural meadows and fields with little to no tree cover, open savanna with few to no trees, parks/golf courses/lawns, and pastures. Open areas covered in homogenous grasses with little to no taller vegetation; wild cereals and grasses without obvious human plotting (i.e., not a plotted field). |
| 4 | Flooded vegetation | Any area with vegetation of any kind that is clearly interspersed with water for the majority of the year; a seasonal floodplain that contains a mixture of grass, shrubs, trees, and bare ground. Examples include flooded mangroves, emergent vegetation, rice paddies, and other heavily irrigated and inundated agricultural areas. |
| 5 | Crops | Cereals, grasses, and crops not at tree height that have been planted or plotted by humans include corn, wheat, soy, and fallow areas of structured land. |
| 6 | Scrub/shrub | A mixture of small groupings of plants or lone plants scattered across a landscape with exposed rock or dirt; thick woodlands with visible gaps that are plainly not taller than trees; examples include savannas with very scant grasses, trees, or other vegetation, and areas with a moderate to sparse cover of bushes, shrubs, and tufts of grass. |
| 7 | Built Area | Large homogenous impervious surfaces, such as parking garages, office buildings, and residential dwellings, are all man-made structures. Examples include houses, dense villages, towns, and cities, paved highways, and asphalt. |
| 8 | Bare ground | Examples include exposed rock or soil, deserts and sand dunes, arid salt flats/pans, dried lake beds, mines, and areas of rock or soil with very little to no vegetation during the entire year. |
| 9 | Snow/Ice | Large, uniform patches of always-present snow or ice, usually found exclusively in mountainous regions or the northernmost latitudes; examples include glaciers, the permanent snowpack, and snow fields. |
| 10 | Clouds | Continual cloud cover prevents information on land coverings. |
| NLCD Topology Value | Description | Manning’s Roughness (n) Value Range | Manning’s Roughness (n) Average |
|---|---|---|---|
| 95 | Emergent Herbaceous Wetlands | 0.05–0.085 | 0.068 |
| 90 | Woody Wetlands | 0.045–0.15 | 0.098 |
| 82 | Cultivated Crops | 0.020–0.05 | 0.035 |
| 81 | Pasture/Hay | 0.025–0.05 | 0.038 |
| 72 | Sedge/Herbaceous | 0.025–0.05 | 0.038 |
| 71 | Grassland/Herbaceous | 0.025–0.05 | 0.038 |
| 52 | Shrub/Scrub | 0.07–0.16 | 0.115 |
| 51 | Dwarf Scrub | 0.025–0.05 | 0.038 |
| 43 | Mixed Forest | 0.08–0.20 | 0.140 |
| 42 | Evergreen Forest | 0.08–0.16 | 0.120 |
| 41 | Deciduous Forest | 0.10–0.20 | 0.150 |
| 31 | Barren Land (Rock/Sand/Clay) | 0.023–0.030 | 0.027 |
| 24 | Developed, High Intensity | 0.12–0.20 | 0.160 |
| 23 | Developed, Medium Intensity | 0.08–0.16 | 0.120 |
| 22 | Developed, Low Intensity | 0.06–0.12 | 0.090 |
| 21 | Developed, Open Space | 0.03–0.05 | 0.040 |
| 11 | Open Water | 0.025–0.05 | 0.038 |
| NLCD 2019 (Reference Layer) | LULC 2020-ESRI (User’s Layer) | |||||||
|---|---|---|---|---|---|---|---|---|
| Water (1) | Trees (2) | Grass (3) | Flooded Vegetation (4) | Crops (5) | Scrub/Shrub (6) | Built Area (7) | Bare Ground (8) | |
| Open Water (11) | 17,175 | 127 | 50 | 107 | 117 | 246 | 48 | 115 |
| Developed, Open Space (21) | 25 | 2712 | 882 | 21 | 1942 | 1464 | 4624 | 49 |
| Developed, Low Intensity (22) | 25 | 535 | 262 | 1 | 1101 | 411 | 5980 | 25 |
| Developed, Medium Intensity (23) | 21 | 105 | 41 | 3 | 329 | 170 | 5528 | 43 |
| Developed, High Intensity (24) | 9 | 7 | 1 | 0 | 43 | 27 | 2941 | 13 |
| Barren Land (31) | 96 | 50 | 25 | 9 | 56 | 2052 | 147 | 3188 |
| Deciduous Forest (41) | 127 | 35,081 | 723 | 62 | 721 | 2679 | 605 | 1 |
| Evergreen Forest (42) | 56 | 48,243 | 274 | 19 | 282 | 17,734 | 558 | 64 |
| Mixed Forest (43) | 45 | 11,332 | 205 | 11 | 117 | 542 | 364 | 0 |
| Shrub/Scrub (52) | 78 | 7279 | 1340 | 15 | 3353 | 119,366 | 940 | 1156 |
| Grassland/Herbaceous (71) | 186 | 2080 | 5875 | 123 | 7882 | 59,054 | 932 | 617 |
| Pasture/Hay (81) | 88 | 3246 | 10,822 | 109 | 8706 | 3179 | 1102 | 21 |
| Cultivated Crops (82) | 78 | 1120 | 1828 | 135 | 108,515 | 2863 | 674 | 196 |
| Woody Wetlands (90) | 176 | 13,409 | 404 | 127 | 427 | 1487 | 117 | 9 |
| Emergent Herbaceous Wetlands (95) | 194 | 678 | 797 | 888 | 1097 | 2342 | 99 | 52 |
| TOTAL | 18,379 | 126,004 | 23,529 | 1630 | 134,688 | 213,616 | 24,659 | 5549 |
| TRUE | 17175 | 108,065 | 16,697 | 888 | 108,515 | 119,366 | 19,073 | 3188 |
| Class Accuracy | 93% | 86% | 71% | 54% | 81% | 56% | 77% | 57% |
| Overall Accuracy | 72% | |||||||
| LULC 2020-ESRI Value | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| Class Description | Water | Trees | Grass | Flooded Vegetation | Crops | Scrub/Shrub | Built Area | Bare Ground |
| NLCD Corresponding class Values | 11 | 42- 41- 43- 90 | 81- 71 | 95 | 82 | 52 | 22- 21- 23- 24 | 31 |
| Average Method-Suggested Roughness Values | ||||||||
| Minimum (n) | 0.025 | 0.087 | 0.025 | 0.05 | 0.02 | 0.07 | 0.073 | 0.023 |
| Maximum (n) | 0.050 | 0.160 | 0.050 | 0.085 | 0.050 | 0.160 | 0.132 | 0.030 |
| Average (n) | 0.038 | 0.137 | 0.038 | 0.068 | 0.035 | 0.115 | 0.103 | 0.027 |
| Weighted Average Method-Suggested Roughness Values | ||||||||
| Minimum (n) | 0.025 | 0.079 | 0.025 | 0.050 | 0.020 | 0.070 | 0.064 | 0.023 |
| Maximum (n) | 0.050 | 0.174 | 0.050 | 0.085 | 0.050 | 0.160 | 0.119 | 0.030 |
| Average (n) | 0.038 | 0.126 | 0.038 | 0.061 | 0.035 | 0.115 | 0.092 | 0.027 |
| Catchment | Outlet-Location (UTM-WGS 84) | Catchment Area (km2) | Gage Number | ||
|---|---|---|---|---|---|
| State | Latitude | Longitude | |||
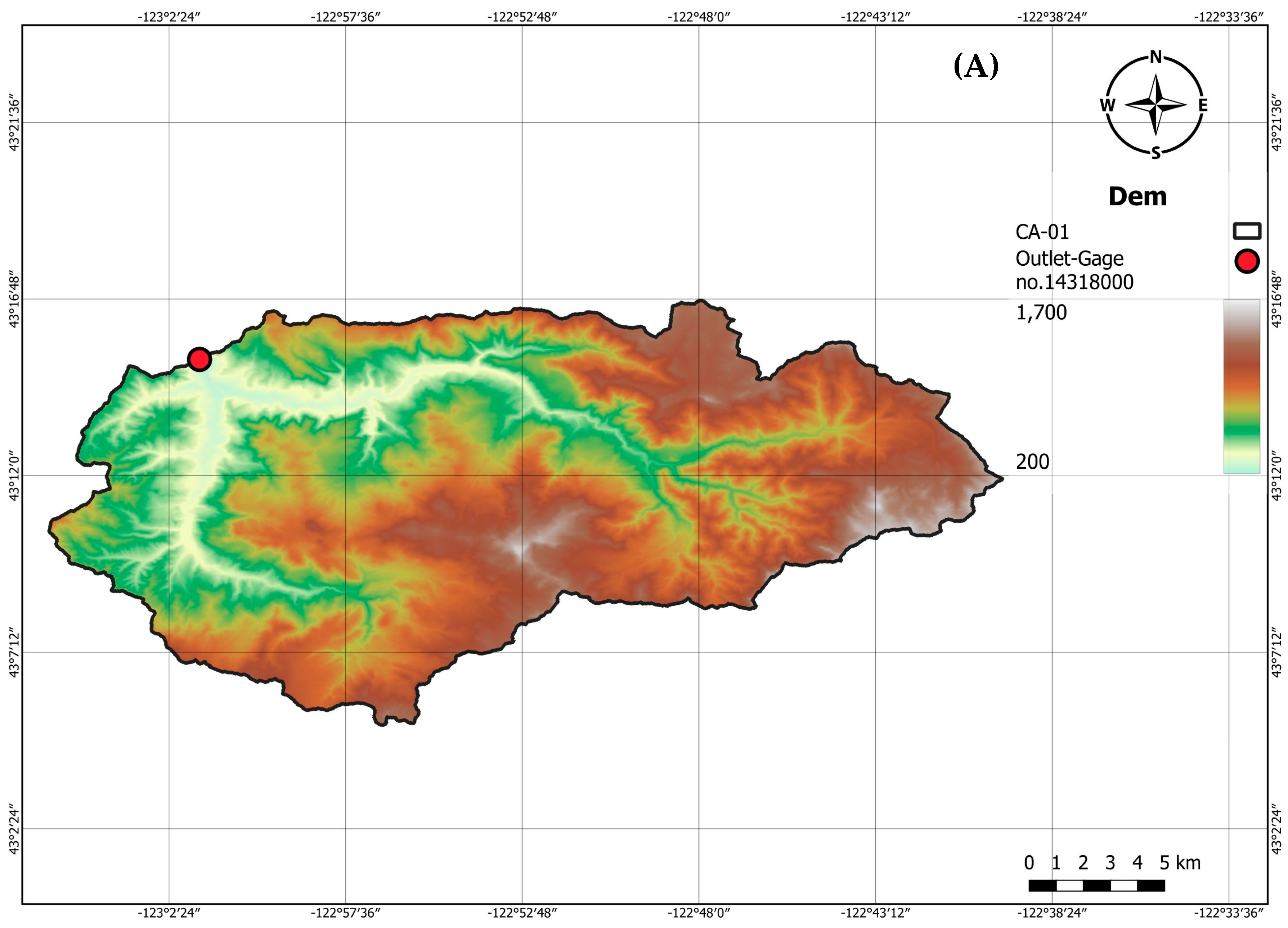
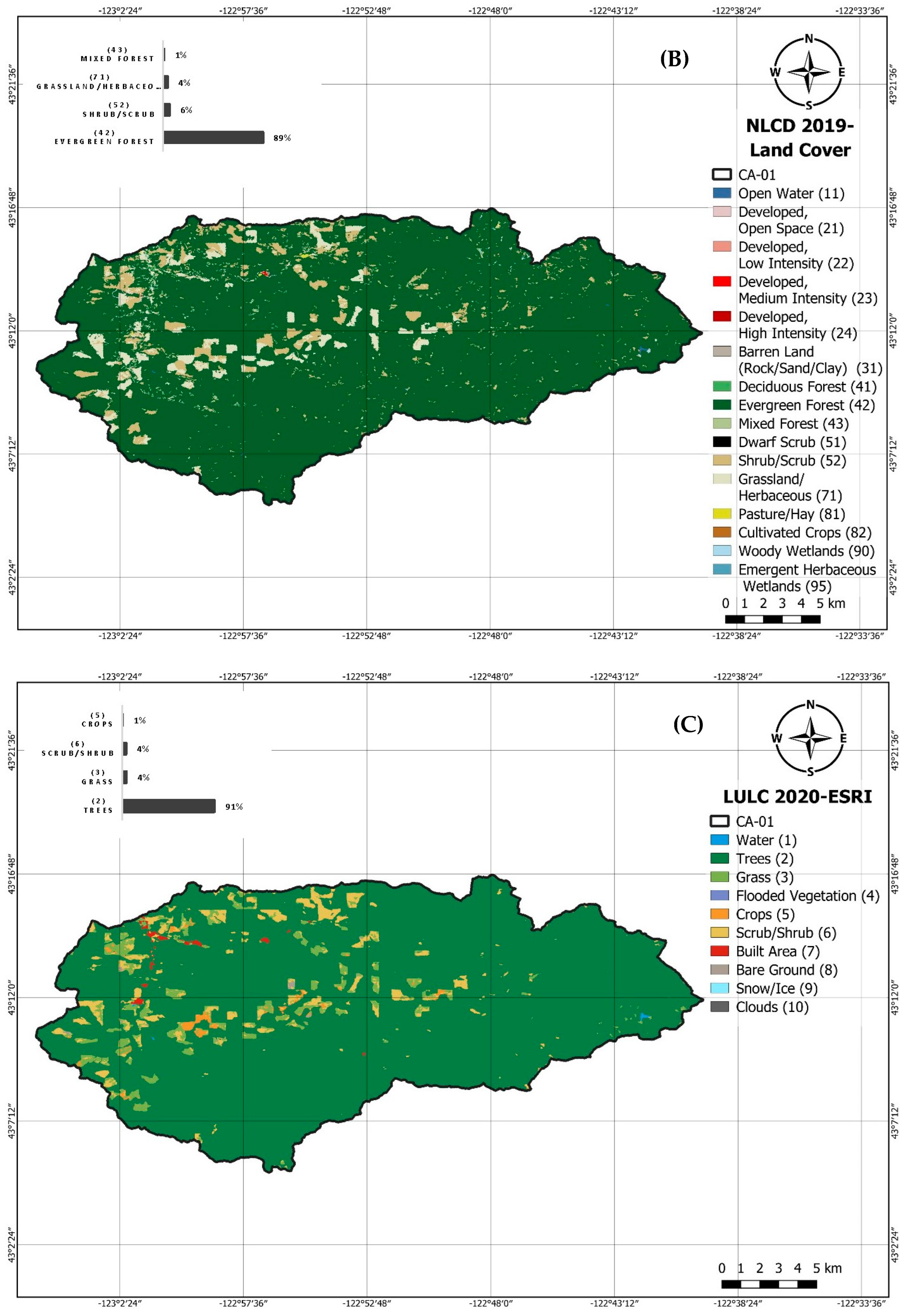
| CA-01 | Oregon | 43.25261790 | −123.0261716 | 459.47 | 14318000 |
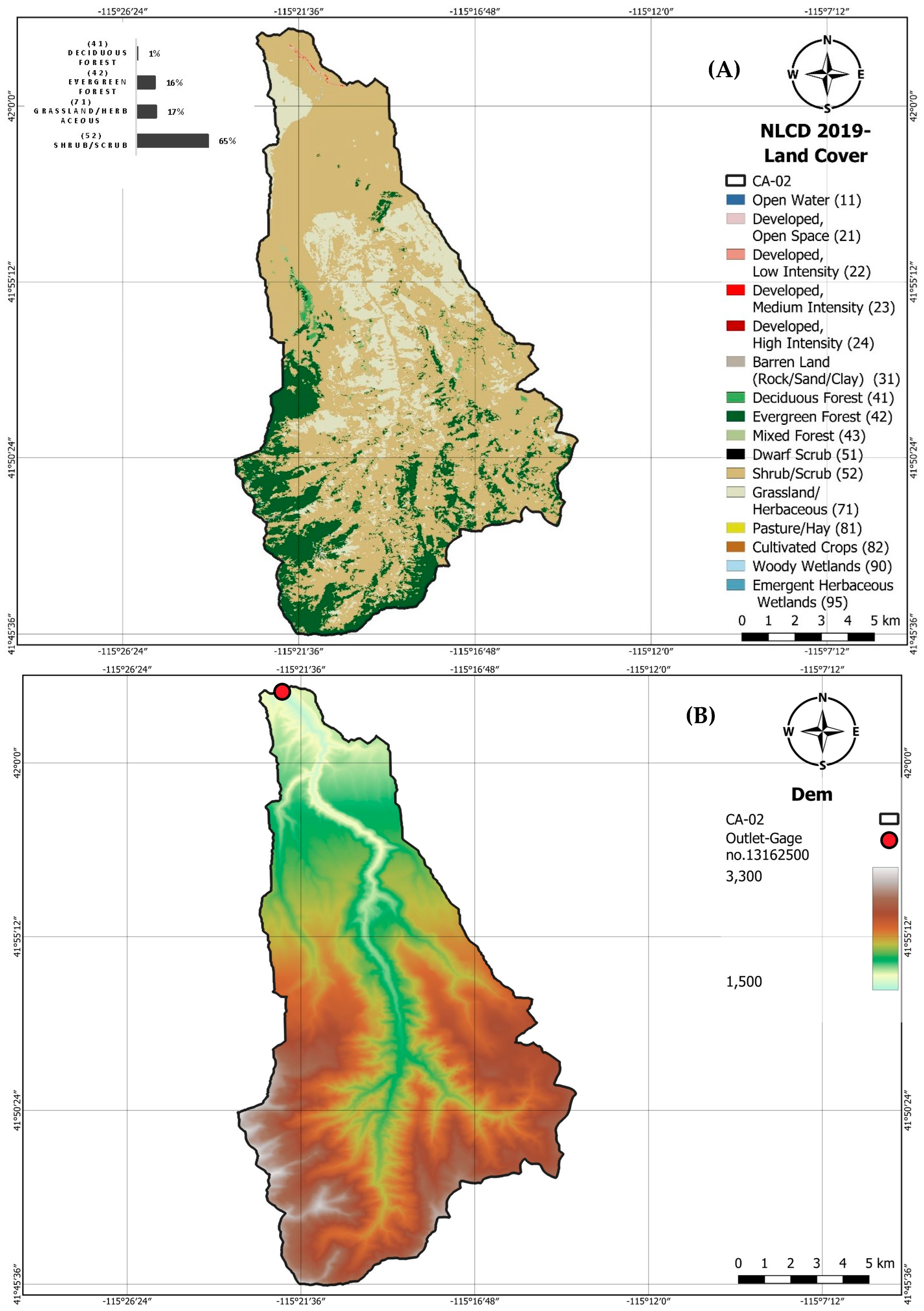
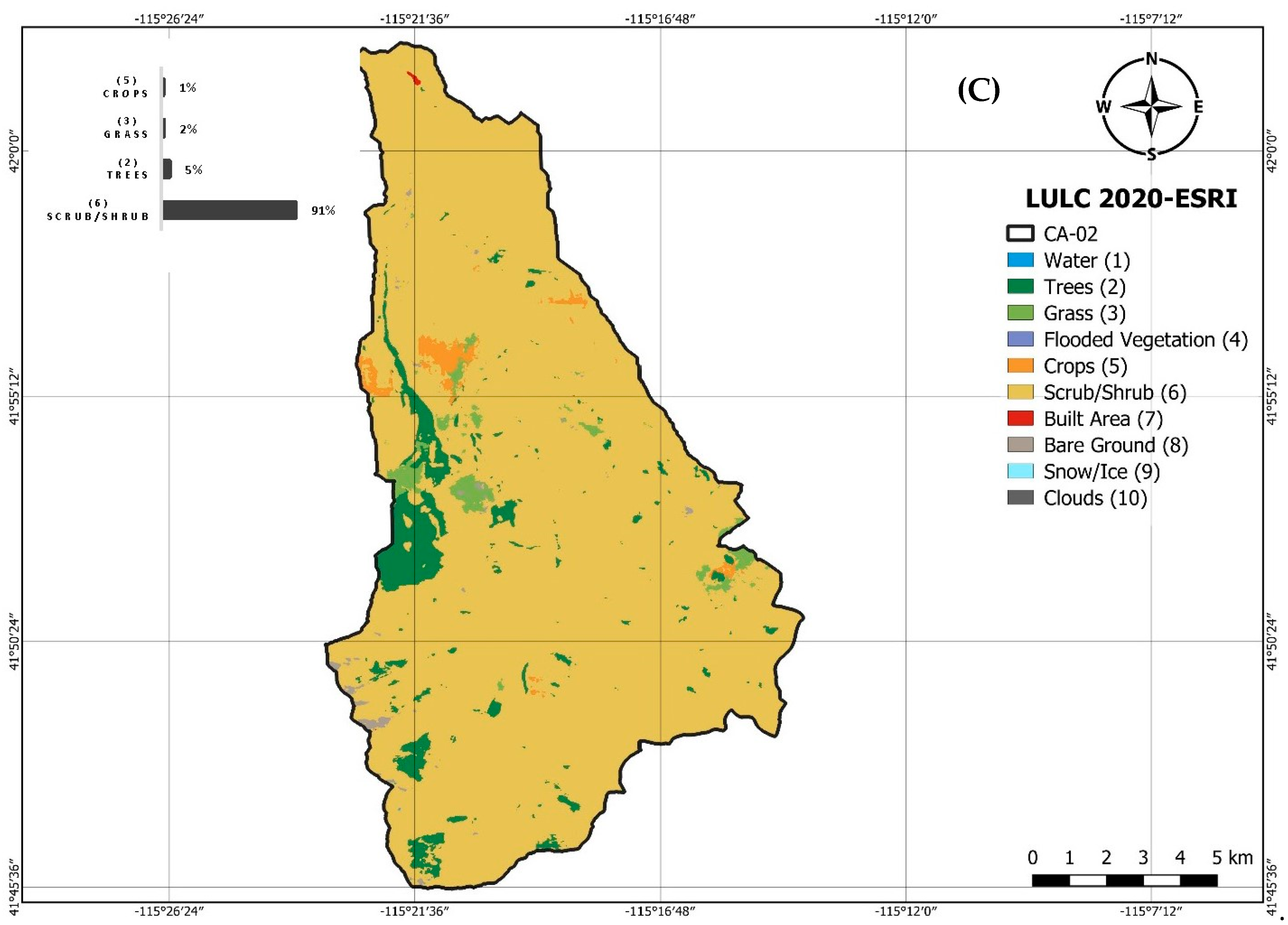
| CA-02 | Idaho | 42.03277500 | −115.3686083 | 217.29 | 13162500 |
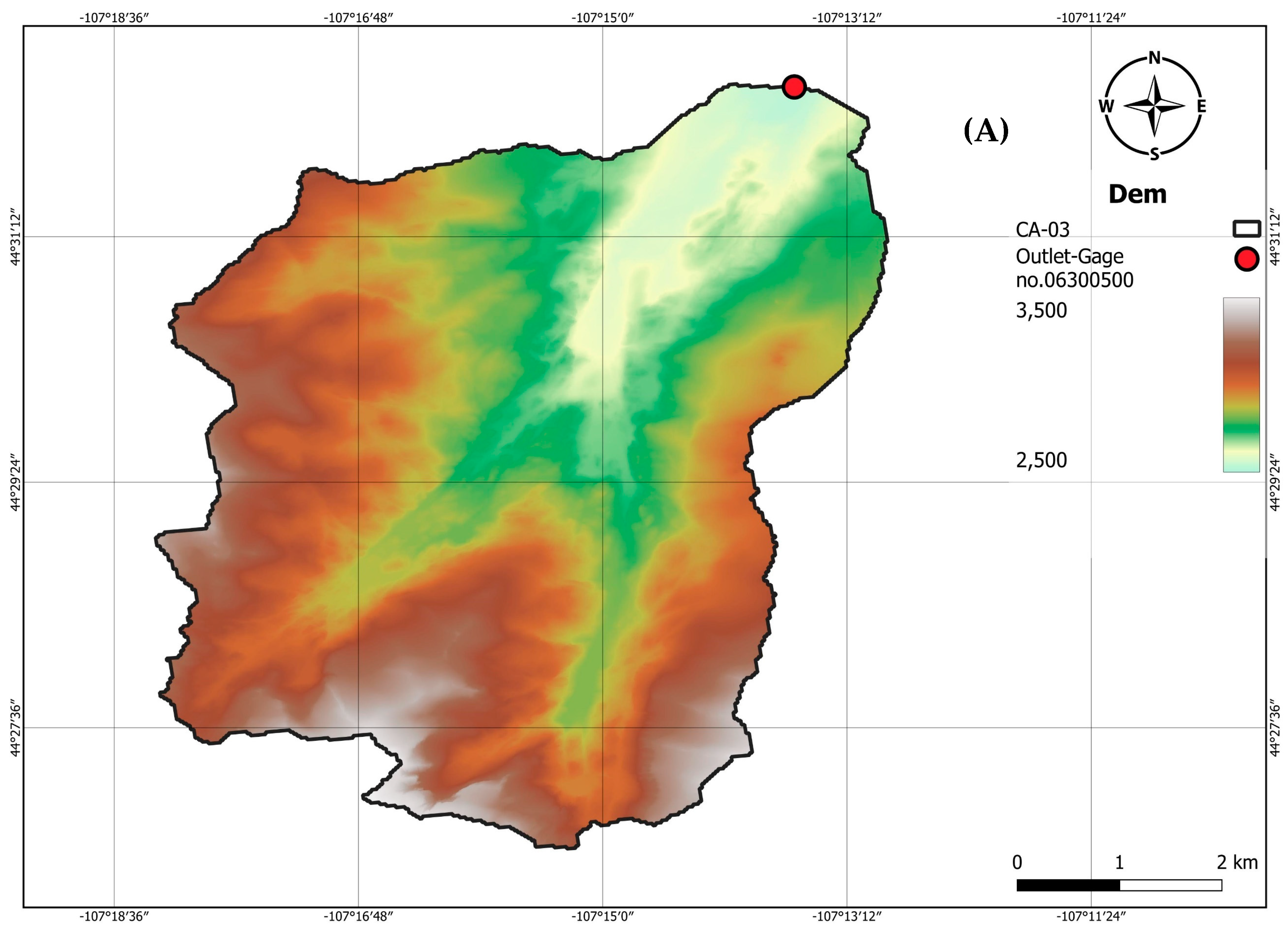
| CA-03 | Wyoming | 44.53830075 | −107.2264592 | 50.78 | 06300500 |
| CA-04 | Colorado | 39.33415000 | −106.5753000 | 18.73 | 09078200 |
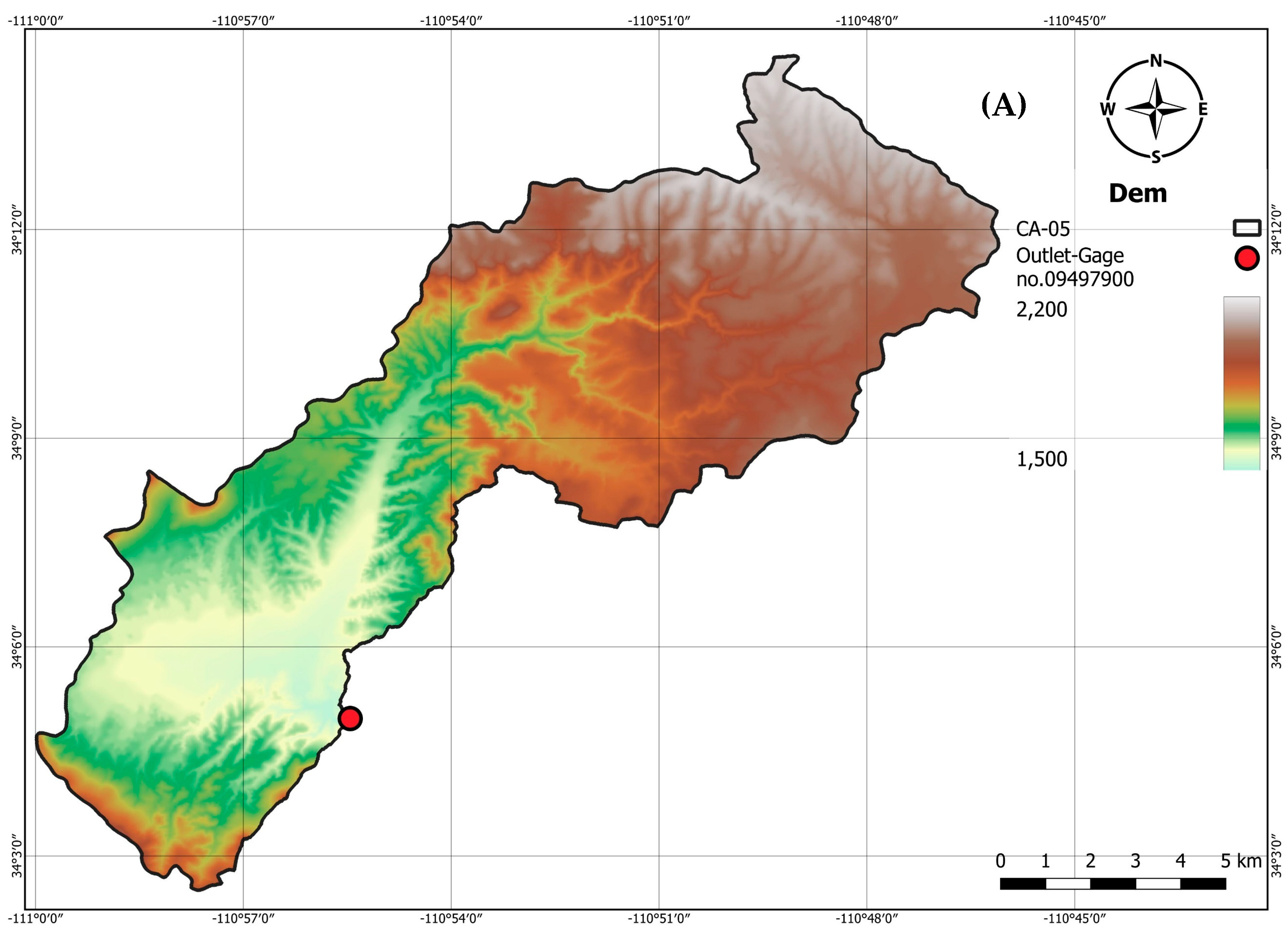
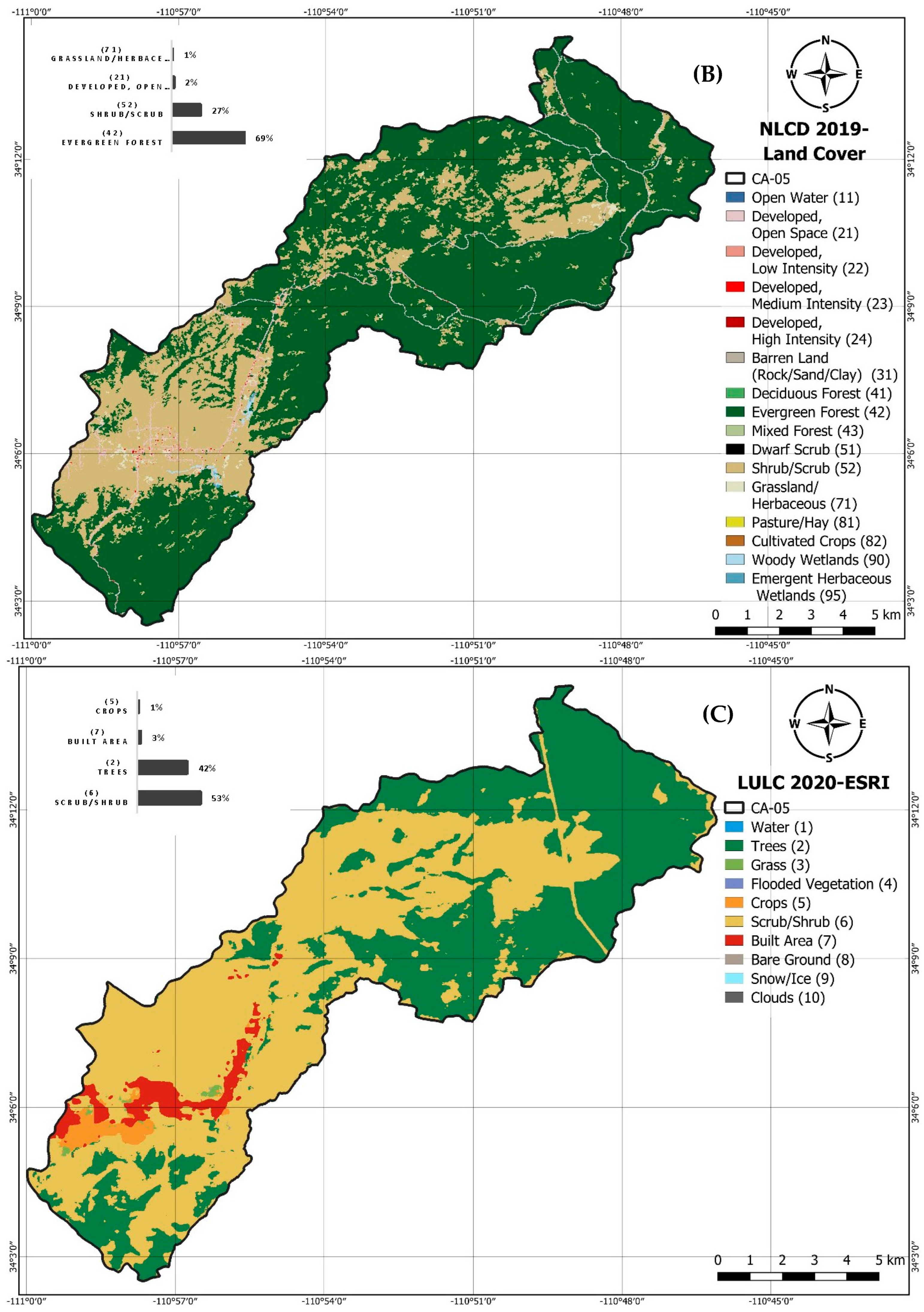
| CA-05 | Arizona | 34.08282162 | −110.9242900 | 161.02 | 09497900 |
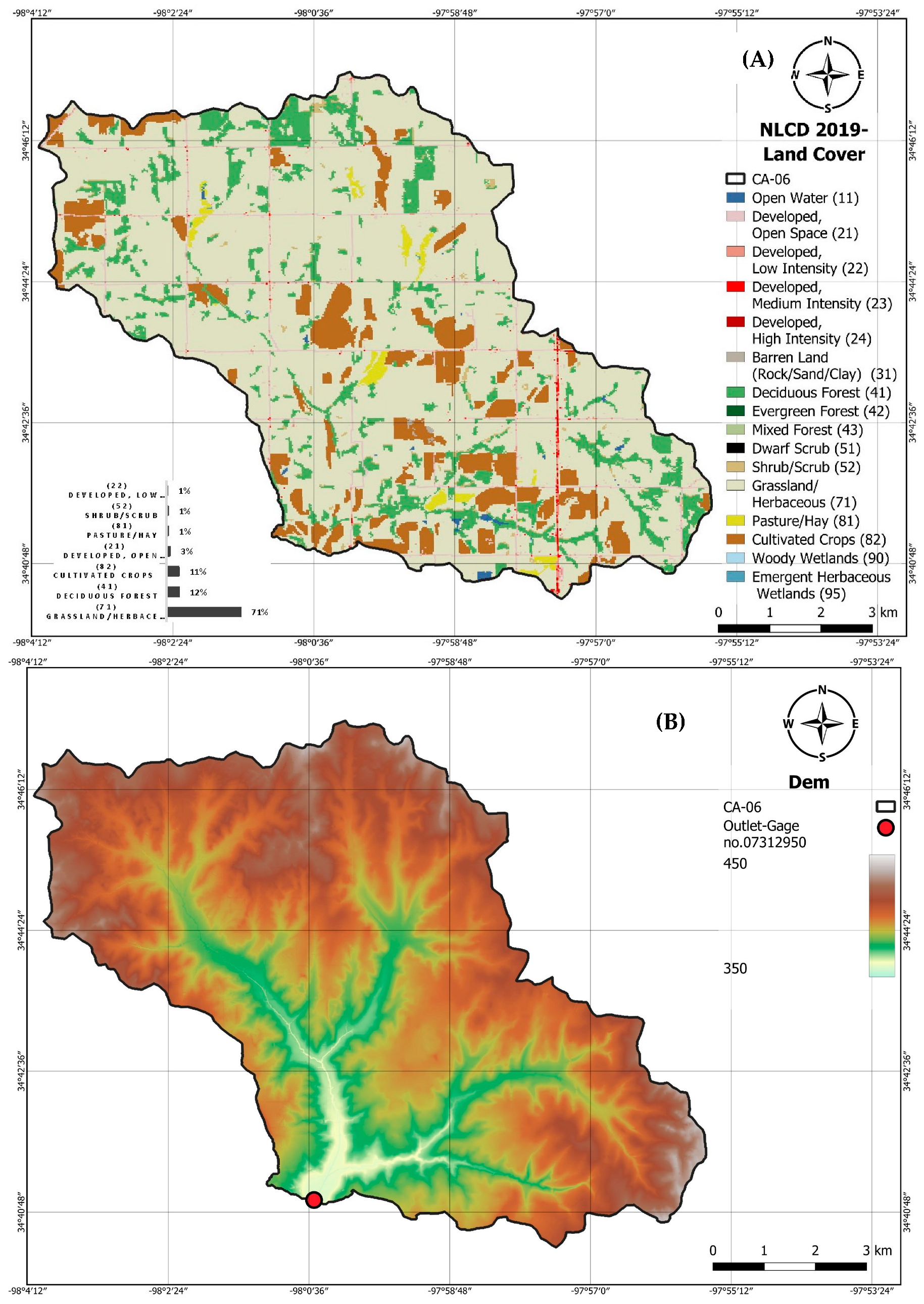
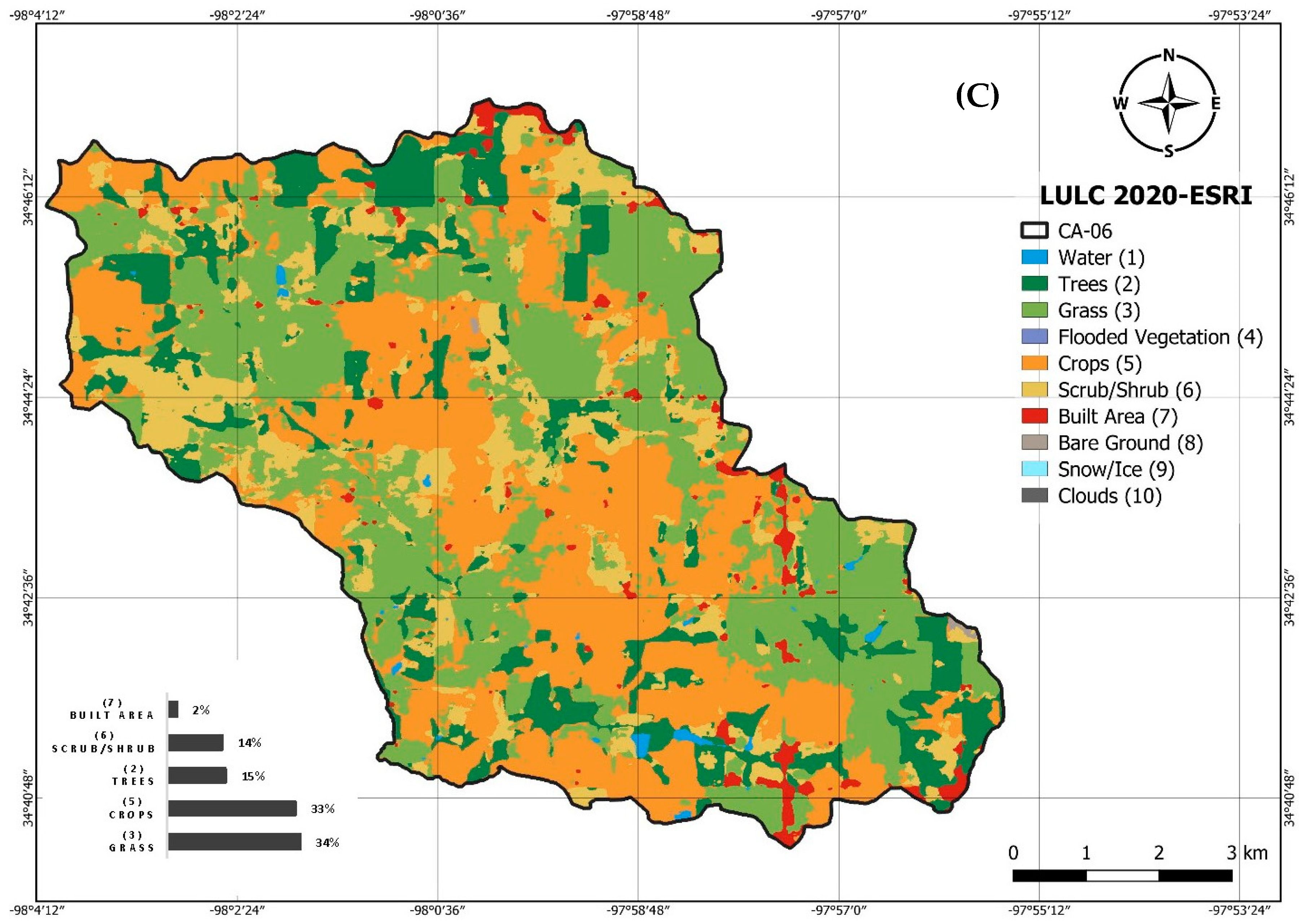
| CA-06 | Oklahoma | 34.68258000 | −98.00893000 | 90.21 | 07312950 |
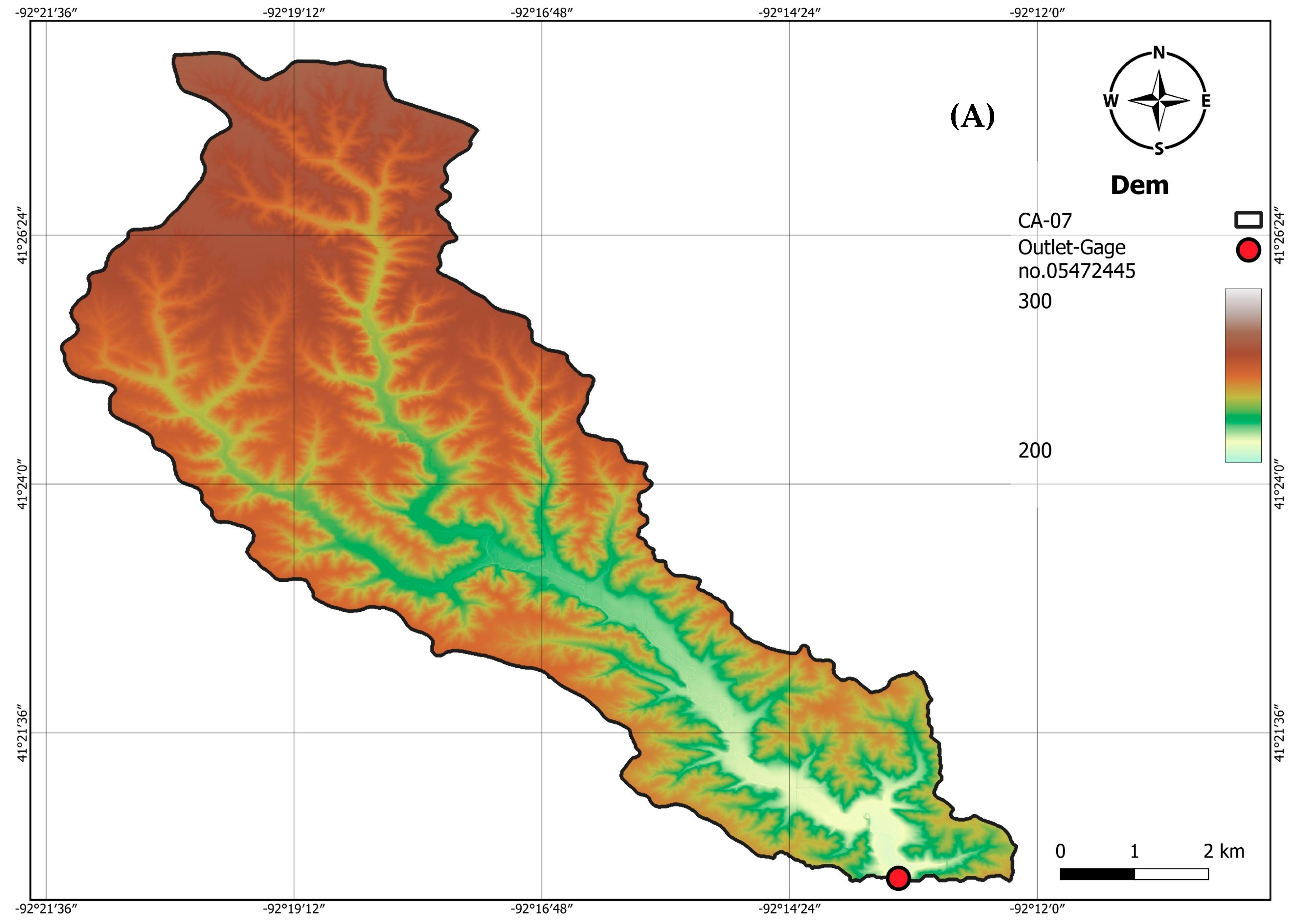
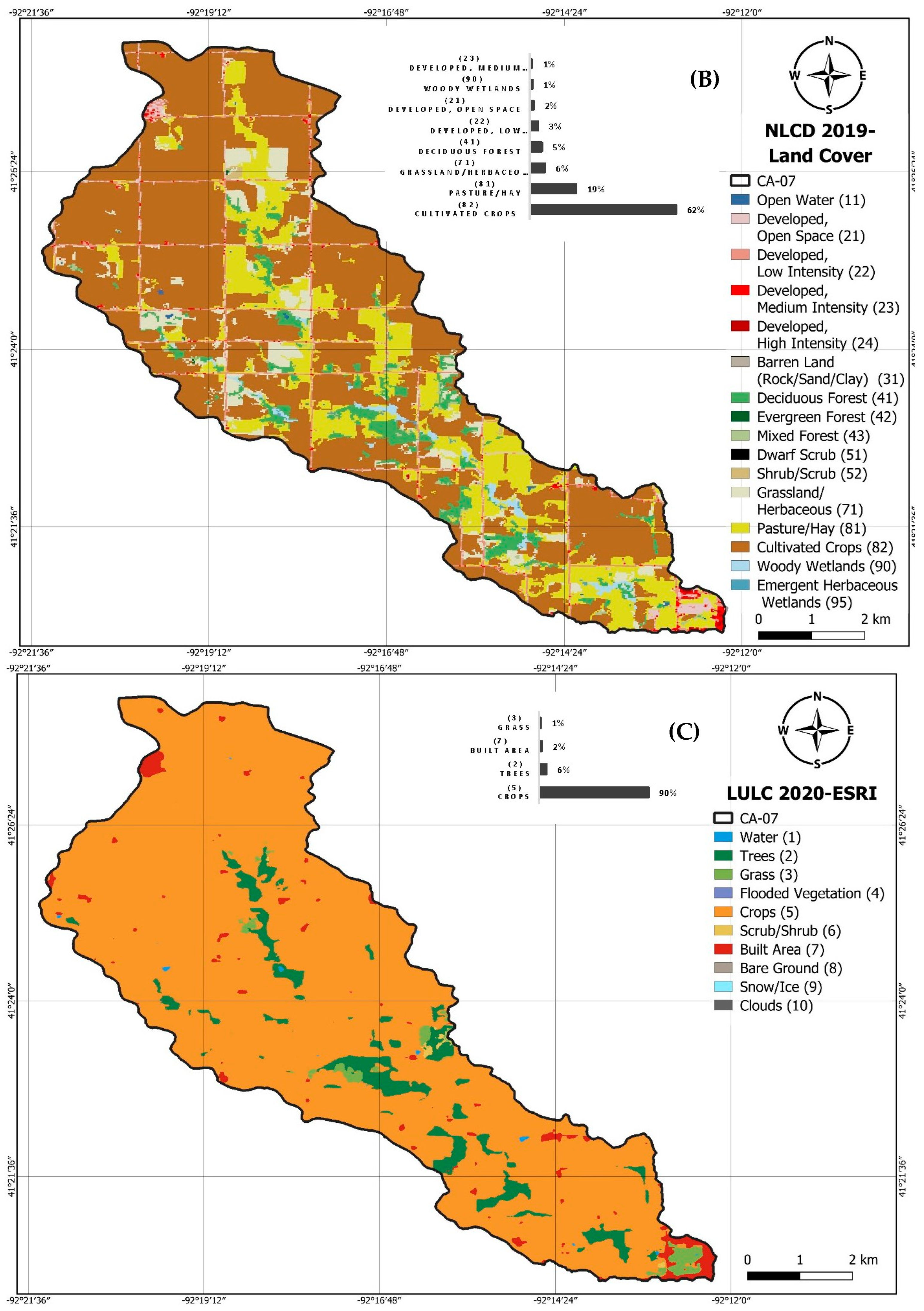
| CA-07 | Iowa | 41.33667771 | −92.22240371 | 67.95 | 05472445 |
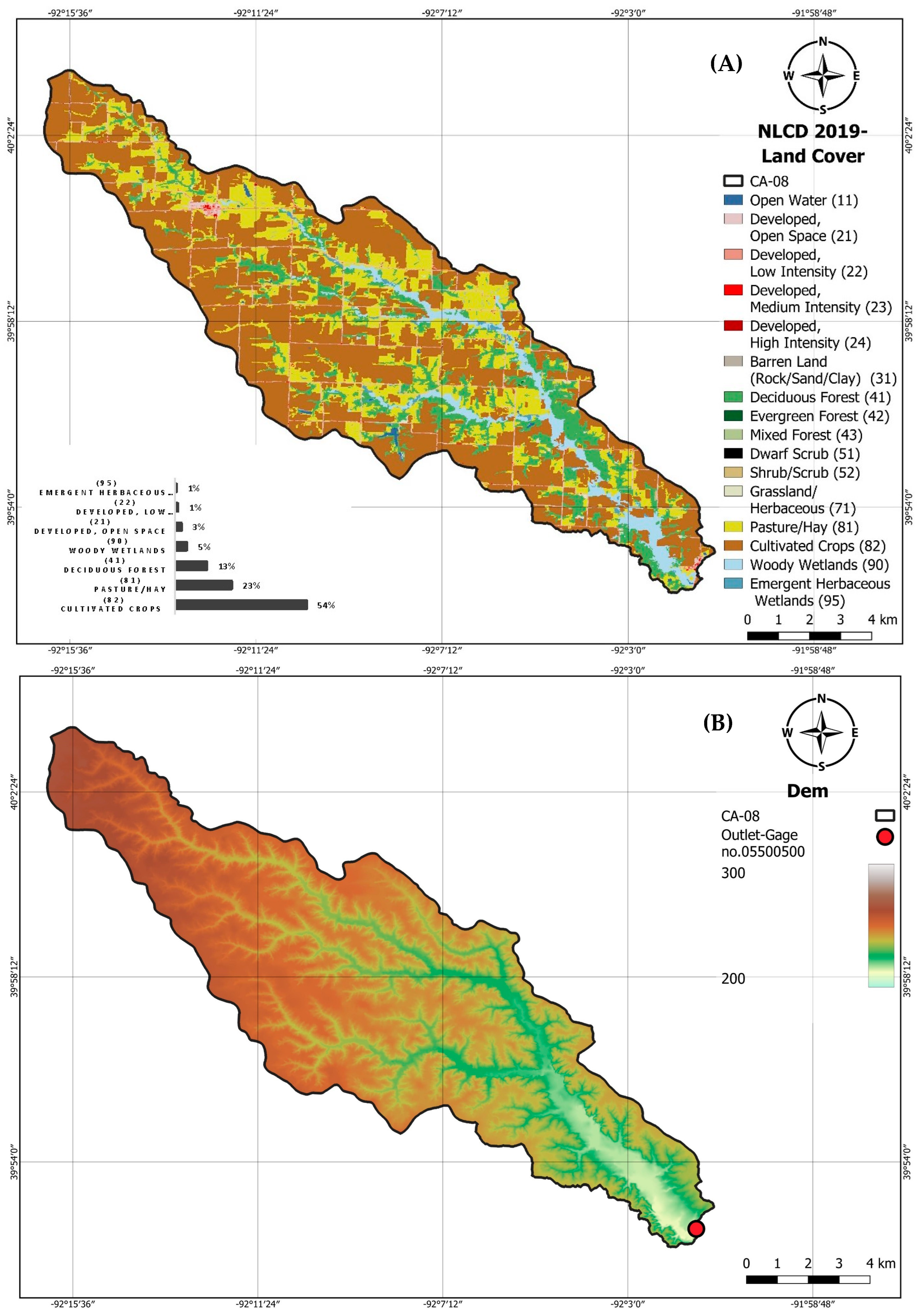
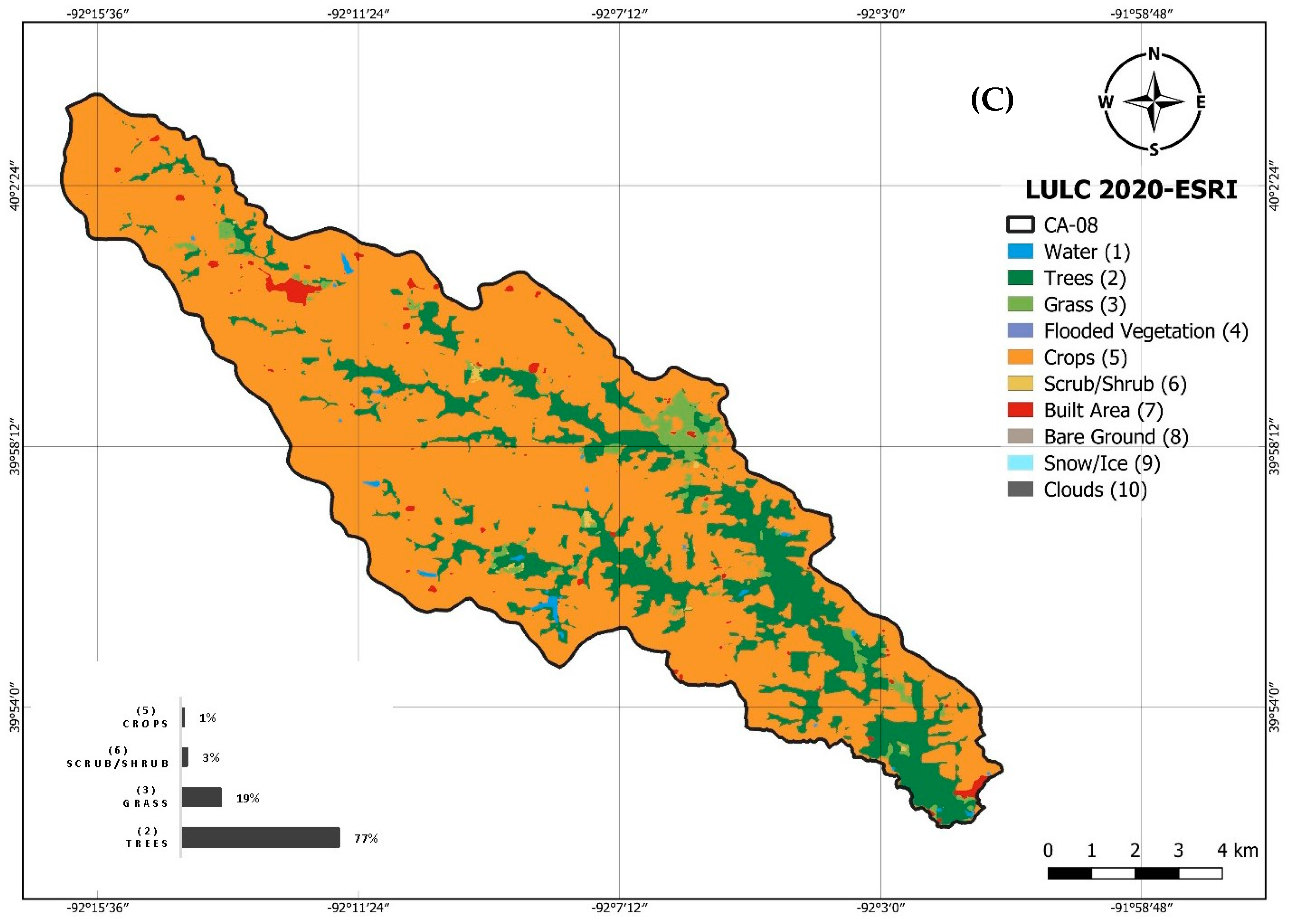
| CA-08 | St.Louis | 39.87476000 | −92.02406000 | 149.27 | 05500500 |
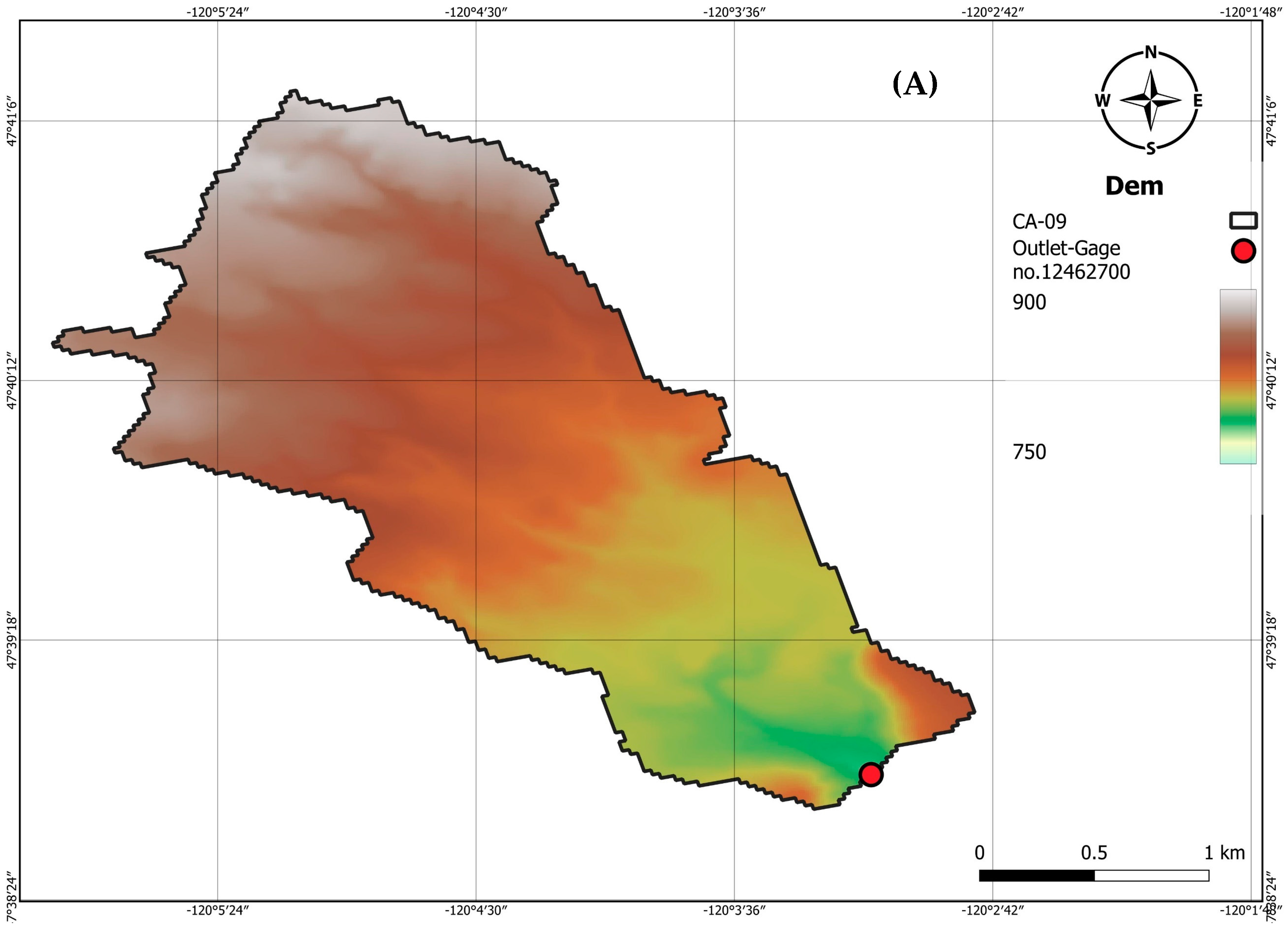
| CA-09 | Washington | 47.64707639 | −120.0539556 | 7.82 | 12462700 |
| Catchment | Catchment Area (km2) | Selected (SCS-CN) | 2-Year Return Period | 100-Year Return Period | ||
|---|---|---|---|---|---|---|
| Precipitation P (mm) | Peak Flow Q (m3/s) | Precipitation P (mm) | Peak Flow Q (m3/s) | |||
| CA-01 | 459.47 | 77 | 66.5 | 268.2 | N/A | N/A |
| CA-02 | 217.29 | 72 | 33.0 | 12.6 | N/A | N/A |
| CA-03 | 50.78 | 74 | 63.5 | 15.0 | N/A | N/A |
| CA-04 | 18.73 | 80 | 40.6 | 3.9 | 68.8 | 10.5 |
| CA-05 | 161.02 | 75 | 68.6 | 39.4 | 139.7 | 260.5 |
| CA-06 | 90.21 | 69 | 91.4 | 22.6 | 230.1 | 362.5 |
| CA-07 | 67.95 | 70 | 115.3 | 90.9 | 186.18 | 213.8 |
| CA-08 | 149.27 | 72 | 86.4 | 51.0 | 237.5 | 294.5 |
| CA-09 | 7.82 | 74 | 52.8 | 5.8 | 59.7 | 7.5 |
| Catchment | CA-01 | CA-02 | CA-03 | CA-04 | CA-05 | CA-06 | CA-07 | CA-08 | CA-09 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Rainfall and Peak Flow Data | Precipitation P2-yrs (mm) | 66.50 | 33.00 | 63.50 | 40.60 | 68.60 | 91.40 | 115.30 | 86.40 | 52.80 | |
| SCS-CN | 77 | 72 | 74 | 80 | 75 | 69 | 70 | 72 | 74 | ||
| StreamStats Q2-yrs (m3/s) | 268.20 | 12.60 | 15.00 | 3.90 | 39.40 | 22.60 | 90.90 | 51.00 | 5.80 | ||
| NLCD 2019 map (Baseline case) | QNLCD (m3/s) | 267.07 | 12.36 | 14.80 | 3.78 | 39.81 | 22.18 | 91.00 | 50.68 | 5.75 | |
| Time to peak (h) | 19.00 | 28.00 | 20.17 | 15.50 | 25.67 | 19.60 | 17.17 | 28.60 | 13.17 | ||
| Error in peak QLULC (%) | 0.42 | 1.90 | 1.33 | 3.08 | 1.04 | 1.86 | 0.11 | 0.63 | 0.86 | ||
| LULC 2020-ESRI Map Average Manning’s Roughness (n) | QLULC-Average (n) (m3/s) | 238.33 | 11.41 | 14.10 | 3.45 | 35.44 | 19.90 | 87.13 | 44.39 | 5.38 | |
| Time to peak (h) | 20.17 | 30.17 | 20.67 | 16.00 | 26.17 | 19.76 | 17.83 | 32.60 | 13.83 | ||
| Error in QLULC-Average (n) (%) | 10.76 | 7.69 | 4.73 | 8.73 | 10.98 | 10.27 | 4.25 | 12.41 | 6.43 | ||
| Error in depth (cm) | RMSE | 3.13 | 2.33 | 2.30 | 1.91 | 1.41 | 2.00 | 4.29 | 8.37 | 6.12 | |
| MAE | 9.04 | 4.15 | 5.43 | 3.28 | 2.51 | 5.34 | 9.13 | 13.20 | 9.53 | ||
| Error in velocity (cm/s) | RMSE | 10.62 | 7.62 | 5.37 | 4.99 | 2.72 | 3.65 | 6.16 | 3.90 | 3.93 | |
| MAE | 18.92 | 13.64 | 13.58 | 7.56 | 5.83 | 7.08 | 12.51 | 6.92 | 10.41 | ||
| LULC 2020-ESRI Map-W. Average Manning’s Roughness (n) | QLULC-W. Average (n) (m3/s) | 254.23 | 11.50 | 14.50 | 3.62 | 37.05 | 20.23 | 88.83 | 47.58 | 5.48 | |
| Time to peak (h) | 19.50 | 30.00 | 20.17 | 15.83 | 25.83 | 19.65 | 17.67 | 31.00 | 13.83 | ||
| Error in QLULC-W. Average (n) (%) | 4.81 | 6.96 | 2.03 | 4.23 | 6.93 | 8.79 | 2.38 | 6.12 | 4.70 | ||
| Error in depth (cm) | RMSE | 2.93 | 2.23 | 1.96 | 1.28 | 1.06 | 1.96 | 4.06 | 4.58 | 6.03 | |
| MAE | 7.87 | 3.95 | 5.03 | 2.84 | 2.16 | 5.12 | 8.60 | 8.85 | 9.44 | ||
| Error in velocity (cm/s) | RMSE | 6.61 | 7.50 | 3.89 | 2.95 | 2.00 | 3.63 | 6.07 | 3.90 | 3.84 | |
| MAE | 17.15 | 13.55 | 13.15 | 6.10 | 5.46 | 7.00 | 12.29 | 6.92 | 10.29 | ||
| Catchment | CA-04 | CA-05 | CA-06 | CA-07 | CA-08 | CA-09 | ||
|---|---|---|---|---|---|---|---|---|
| Rainfall and Peak Flow Data | Precipitation P100-yrs (mm) | 68.8 | 139.7 | 230.1 | 186.18 | 237.5 | 59.7 | |
| SCS-CN | 80 | 75 | 69 | 70 | 72 | 74 | ||
| StreamStats Q100-yrs (m3/s) | 10.51 | 260.51 | 362.46 | 213.79 | 294.50 | 7.50 | ||
| NLCD 2019 map (Baseline case) | QNLCD (m3/s) | 10.35 | 257.86 | 355.54 | 215.17 | 290.50 | 7.35 | |
| Time to peak (h) | 15.50 | 16.63 | 13.63 | 16.20 | 22.88 | 13.37 | ||
| Error in peak QLULC (%) | 1.52 | 1.02 | 1.91 | 0.65 | 1.36 | 2.00 | ||
| LULC 2020-ESRI map-Average Manning’s Roughness (n) | QLULC-Average (n) (m3/s) | 9.55 | 243.64 | 331.89 | 207.54 | 264.43 | 6.97 | |
| Time to peak (h) | 16.00 | 17.00 | 13.83 | 16.63 | 26.08 | 13.50 | ||
| Error in QLULC-Average (n) (%) | 7.73 | 5.51 | 6.65 | 3.55 | 8.97 | 5.17 | ||
| Error in depth (cm) | RMSE | 3.33 | 2.42 | 2.00 | 5.73 | 8.37 | 6.02 | |
| MAE | 9.62 | 5.18 | 5.34 | 11.77 | 13.20 | 9.55 | ||
| Error in velocity (cm/s) | RMSE | 11.29 | 5.41 | 3.65 | 8.07 | 3.90 | 4.29 | |
| MAE | 20.11 | 11.13 | 7.08 | 16.45 | 6.92 | 11.52 | ||
| LULC 2020-ESRI map-W. Average Manning’s Roughness (n) | QLULC-W. Average (n) (m3/s) | 10.04 | 253.06 | 337.37 | 210.98 | 280.58 | 7.10 | |
| Time to peak (h) | 15.83 | 16.83 | 13.83 | 16.33 | 24.80 | 13.40 | ||
| Error in QLULC-W. Average (n) (%) | 3.00 | 1.86 | 5.11 | 1.95 | 3.42 | 3.40 | ||
| Error in depth (cm) | RMSE | 1.84 | 1.87 | 2.80 | 5.01 | 6.55 | 5.93 | |
| MAE | 4.06 | 4.29 | 7.32 | 11.26 | 12.66 | 9.52 | ||
| Error in velocity (cm/s) | RMSE | 4.22 | 3.88 | 5.19 | 8.04 | 5.58 | 4.25 | |
| MAE | 8.72 | 9.90 | 10.03 | 16.38 | 9.90 | 11.39 | ||
| LULC 2020-ESRI | Suggested Roughness Values | |||
|---|---|---|---|---|
| LULC-Value | Description | Minimum (n) | Maximum (n) | Weighted Average(n) |
| 1 | Water | 0.025 | 0.05 | 0.038 |
| 2 | Trees | 0.079 | 0.174 | 0.126 |
| 3 | Grass | 0.025 | 0.05 | 0.038 |
| 4 | Flooded vegetation | 0.05 | 0.085 | 0.061 |
| 5 | Crops | 0.02 | 0.05 | 0.035 |
| 6 | Scrub/shrub | 0.07 | 0.16 | 0.115 |
| 7 | Built Area | 0.064 | 0.119 | 0.092 |
| 8 | Bare ground | 0.023 | 0.03 | 0.027 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soliman, M.; Morsy, M.M.; Radwan, H.G. Assessment of Implementing Land Use/Land Cover LULC 2020-ESRI Global Maps in 2D Flood Modeling Application. Water 2022, 14, 3963. https://doi.org/10.3390/w14233963
Soliman M, Morsy MM, Radwan HG. Assessment of Implementing Land Use/Land Cover LULC 2020-ESRI Global Maps in 2D Flood Modeling Application. Water. 2022; 14(23):3963. https://doi.org/10.3390/w14233963
Chicago/Turabian StyleSoliman, Mohamed, Mohamed M. Morsy, and Hany G. Radwan. 2022. "Assessment of Implementing Land Use/Land Cover LULC 2020-ESRI Global Maps in 2D Flood Modeling Application" Water 14, no. 23: 3963. https://doi.org/10.3390/w14233963
APA StyleSoliman, M., Morsy, M. M., & Radwan, H. G. (2022). Assessment of Implementing Land Use/Land Cover LULC 2020-ESRI Global Maps in 2D Flood Modeling Application. Water, 14(23), 3963. https://doi.org/10.3390/w14233963