

Bayesian Calibration and Uncertainty Assessment of HYDRUS-1D Model Using GLUE Algorithm for Simulating Corn Root Zone Salinity under Linear Move Sprinkle Irrigation System

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Site Description
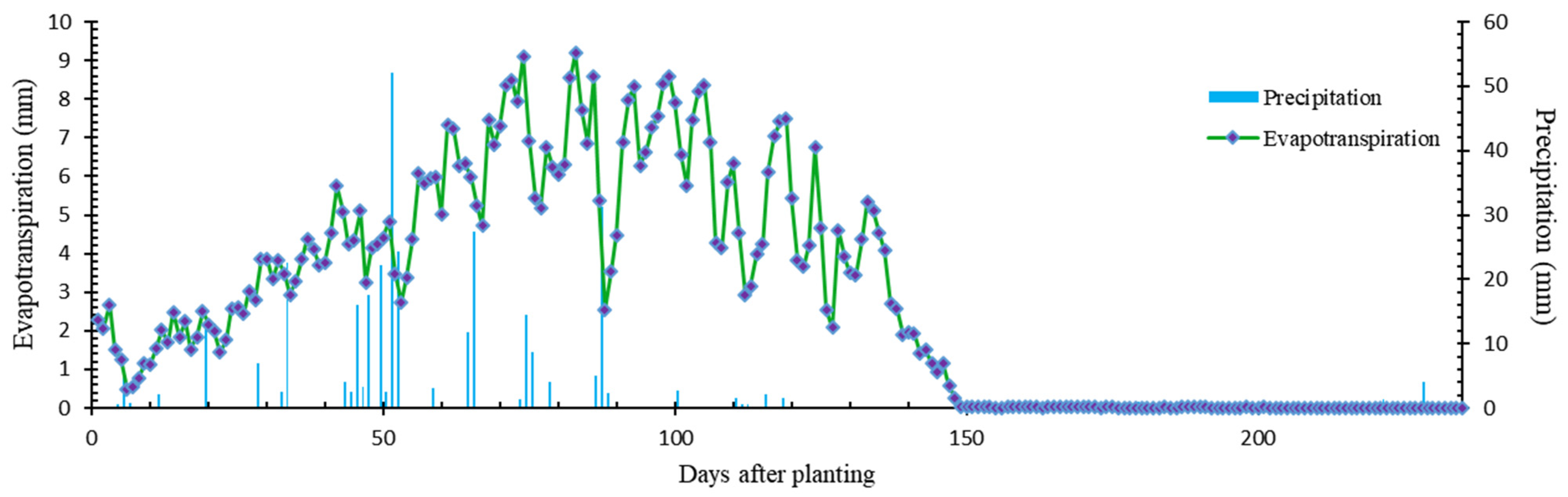
2.2. Data Collection and Management
2.3. HYDRUS-1D Model
2.3.1. Water Flow Modeling
2.3.2. Root Water Uptake
2.3.3. Solute Transport
2.4. The HYDRUS-1D Model Setup
2.5. Uncertainty Assessment and GLUE Method
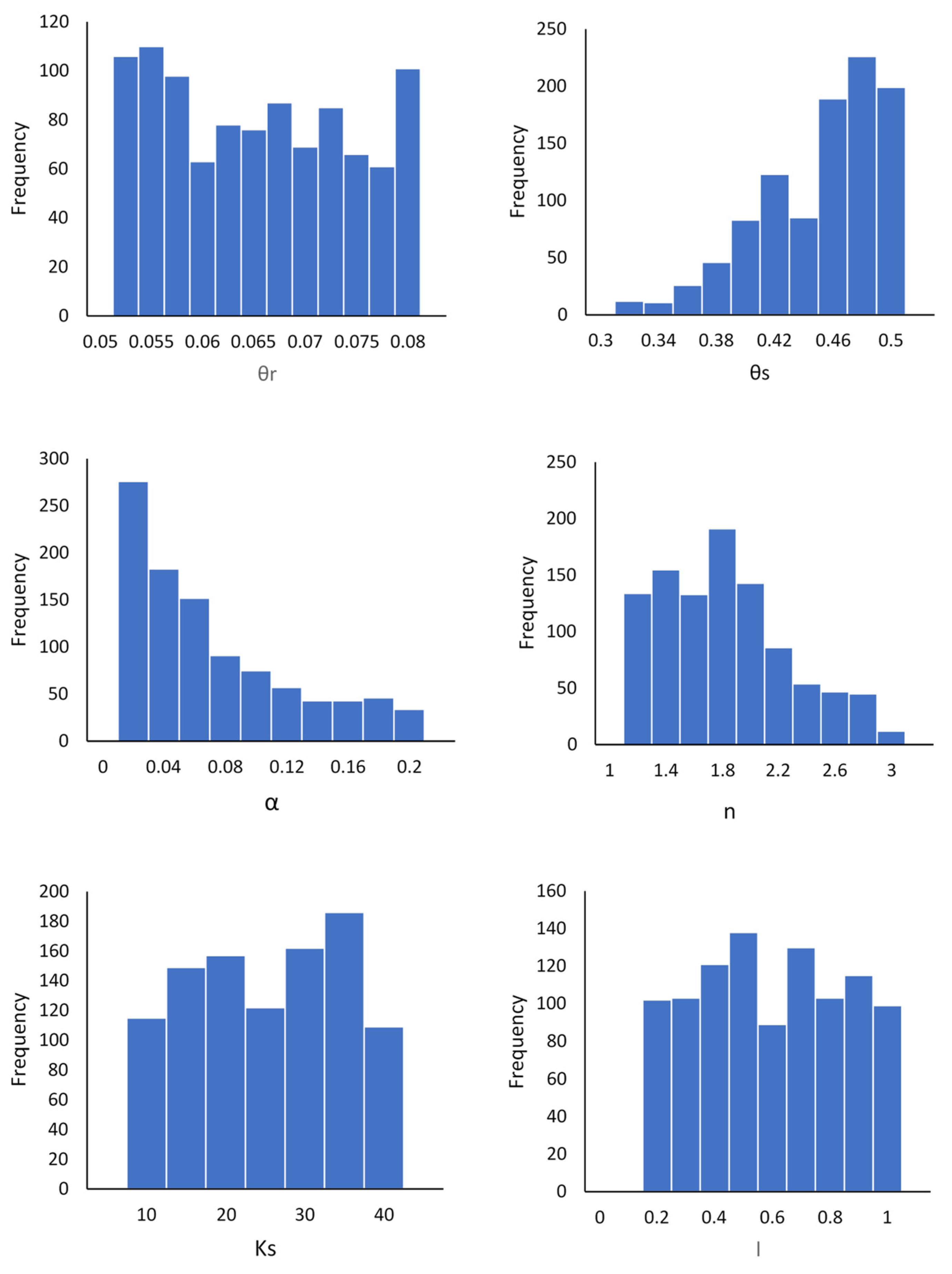
- Water flow simulation parameters: [θr, θs, α, n, Ks, l]
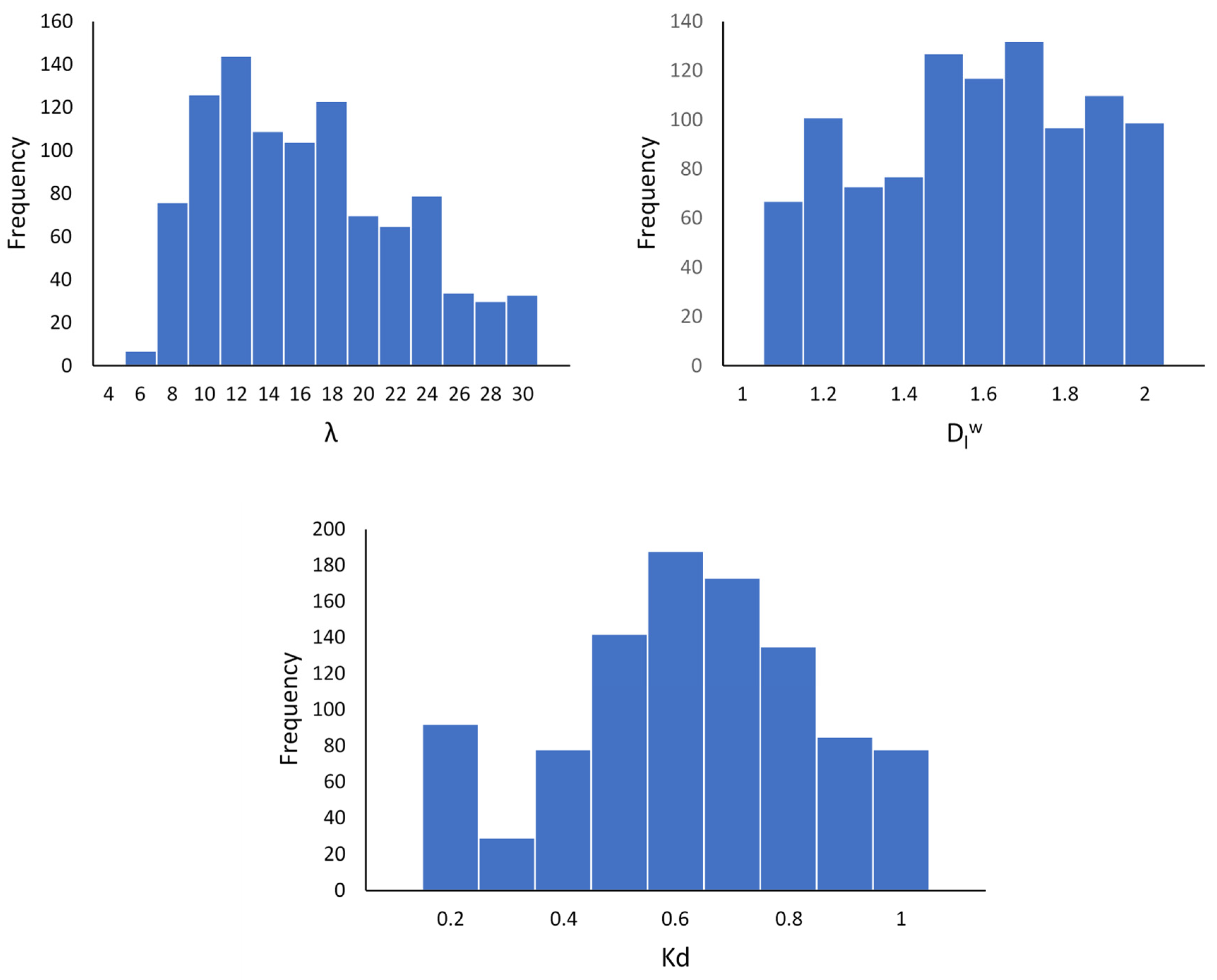
- Solute transport parameters: [λ, Dlw, Kd]
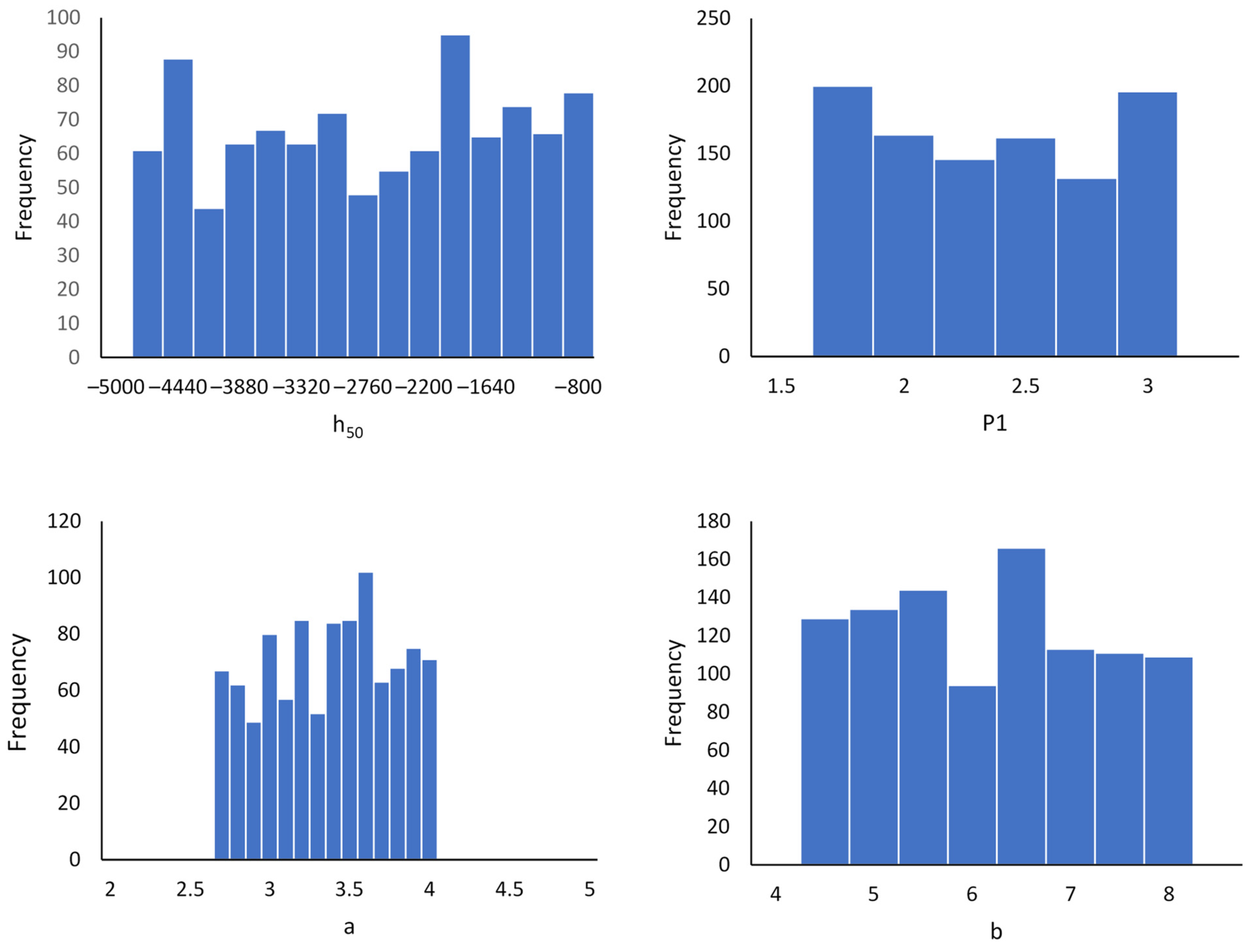
- Root water uptake = [a, b, h50, P1]
- 1.
- The prior distributions of parameters were identified based on the HYDRUS-1D model library and existing values in the literature (Table 4). The priors were considered uniformly distributed.
- 2.
- The parameters’ ranges were randomly sampled n times based on the Monte Carlo approach in RStudio 1.41717 environment.
- 3.
- The HYDRUS-1D model was run in the RStudio environment for each parameter set already sampled.
- 4.
- The likelihood values were calculated using inverse error variance as the likelihood function:
- 5.
- The threshold for likelihood values for behavioral parameter sets was specified. In this study, 10% of successful parameters after screening operation were used for uncertainty analysis.
- 6.
- The probability of each parameter set was computed using the following equation:
- 7.
- The posterior distributions of the parameters and statistics were constructed. The empirical posterior distributions of parameters were achieved by pairs of parameters’ sets (θj) and their corresponding probabilities. Then, by using the following equations, the mean and variance of the parameters were calculated:
- 8.
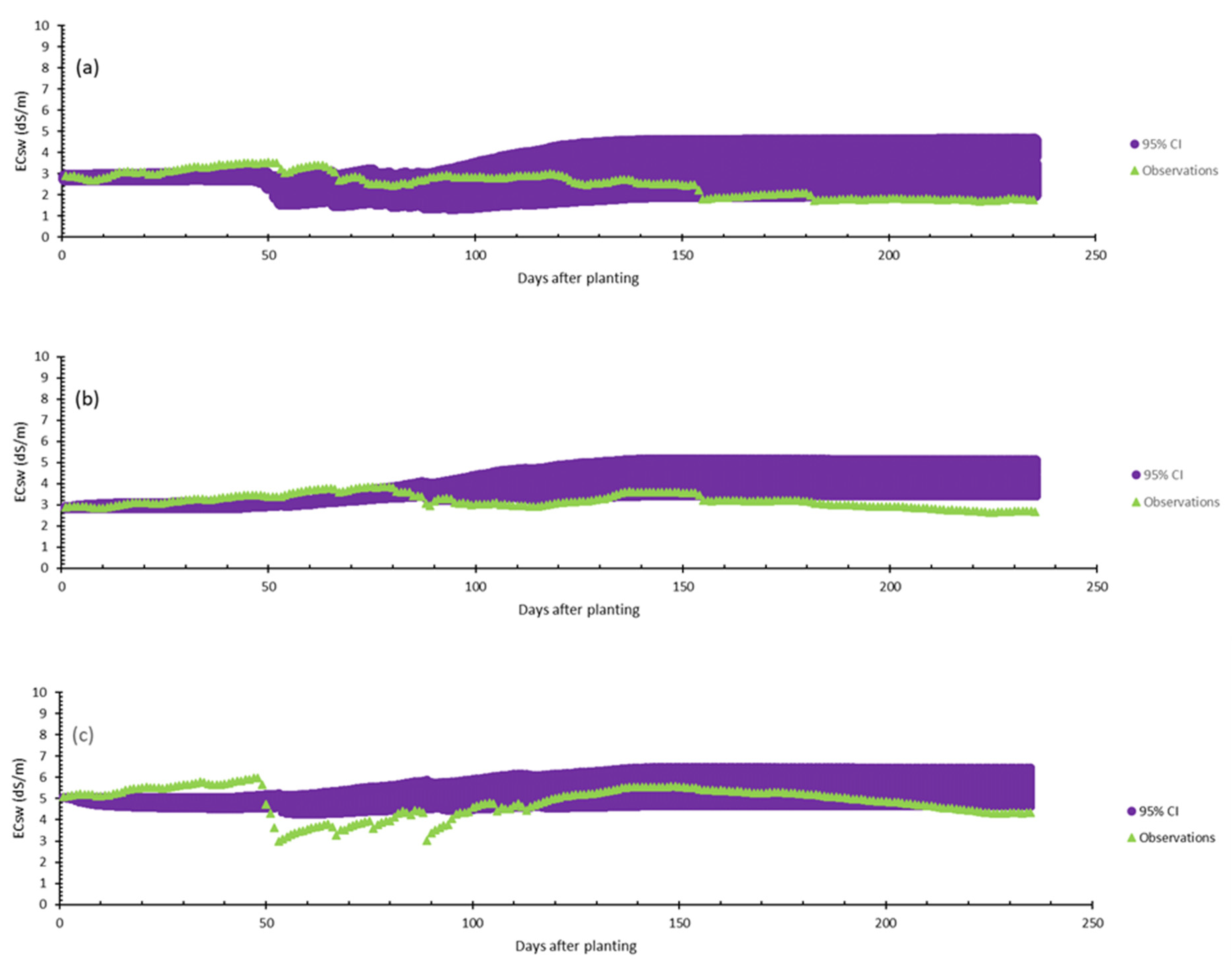
- For the final step, the simulated values of soil water salinity by the HYDRUS-1D model were sorted based on the corresponding probabilities to create a cumulative distribution function of model outputs (predictive uncertainty). Then 95% confidence intervals for model outputs were retrieved [40].
2.6. Evaluation of the Model Performance
3. Results and Discussion
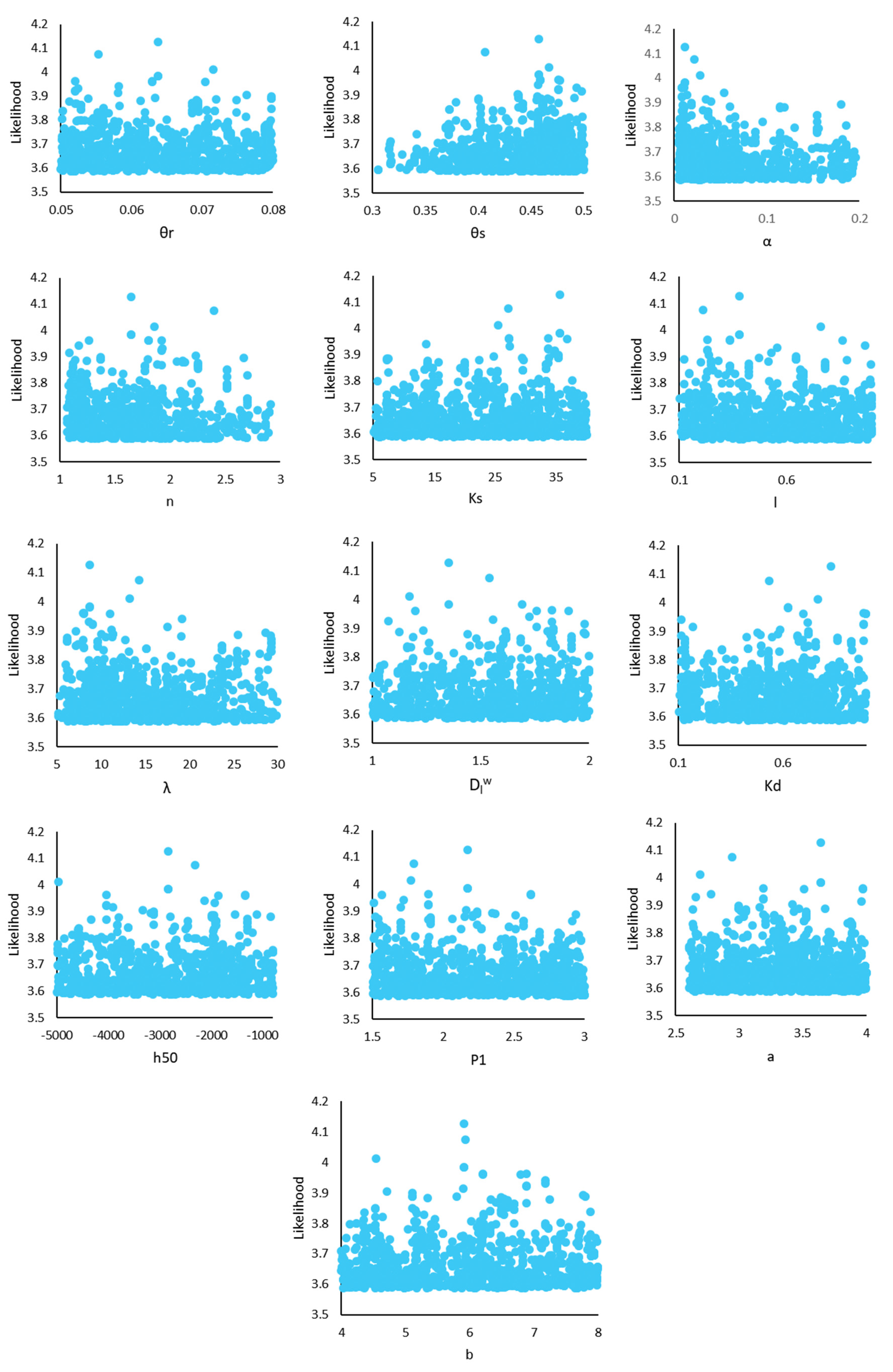
3.1. Parameters Uncertainty
3.2. Predictive Uncertainty
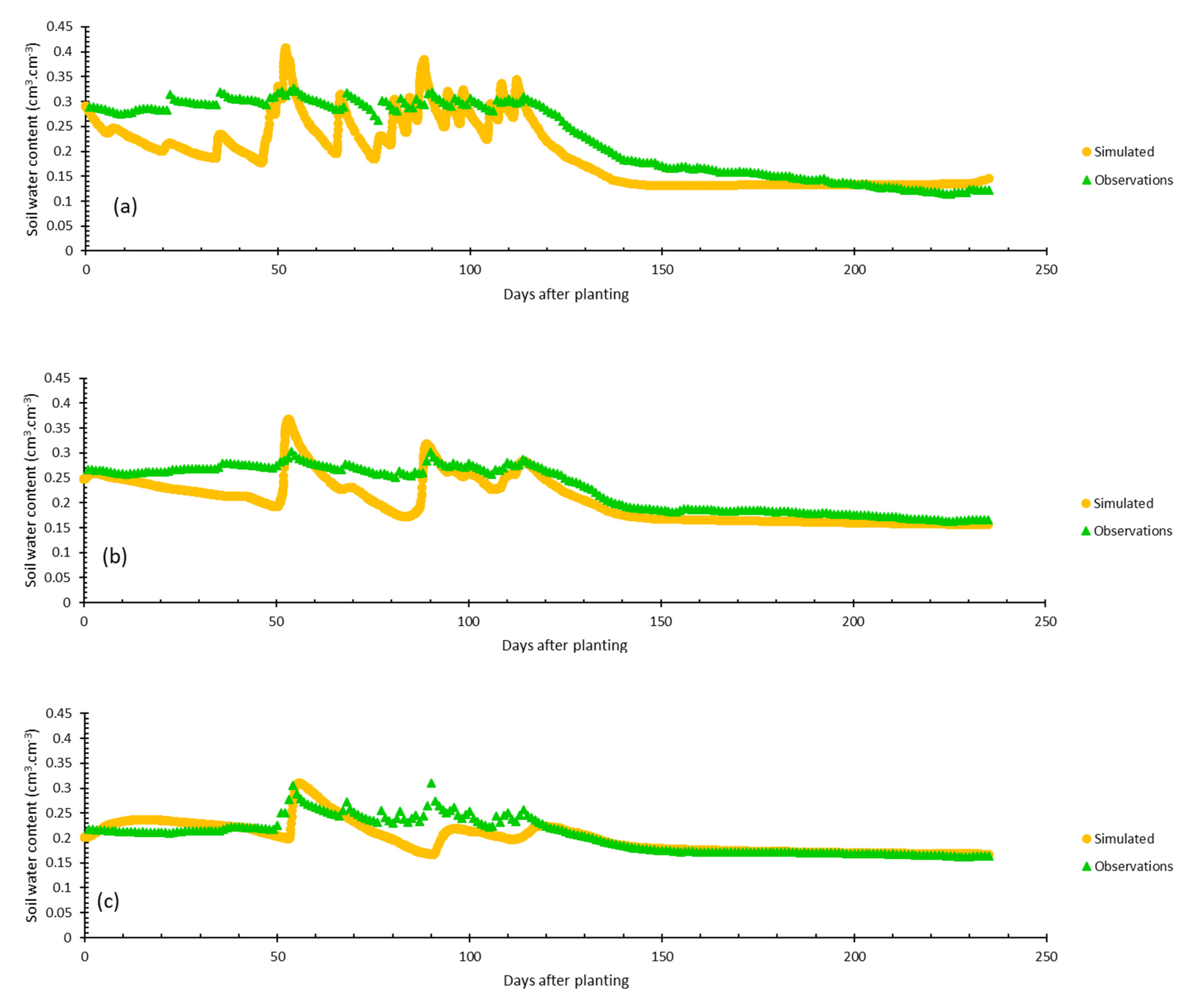
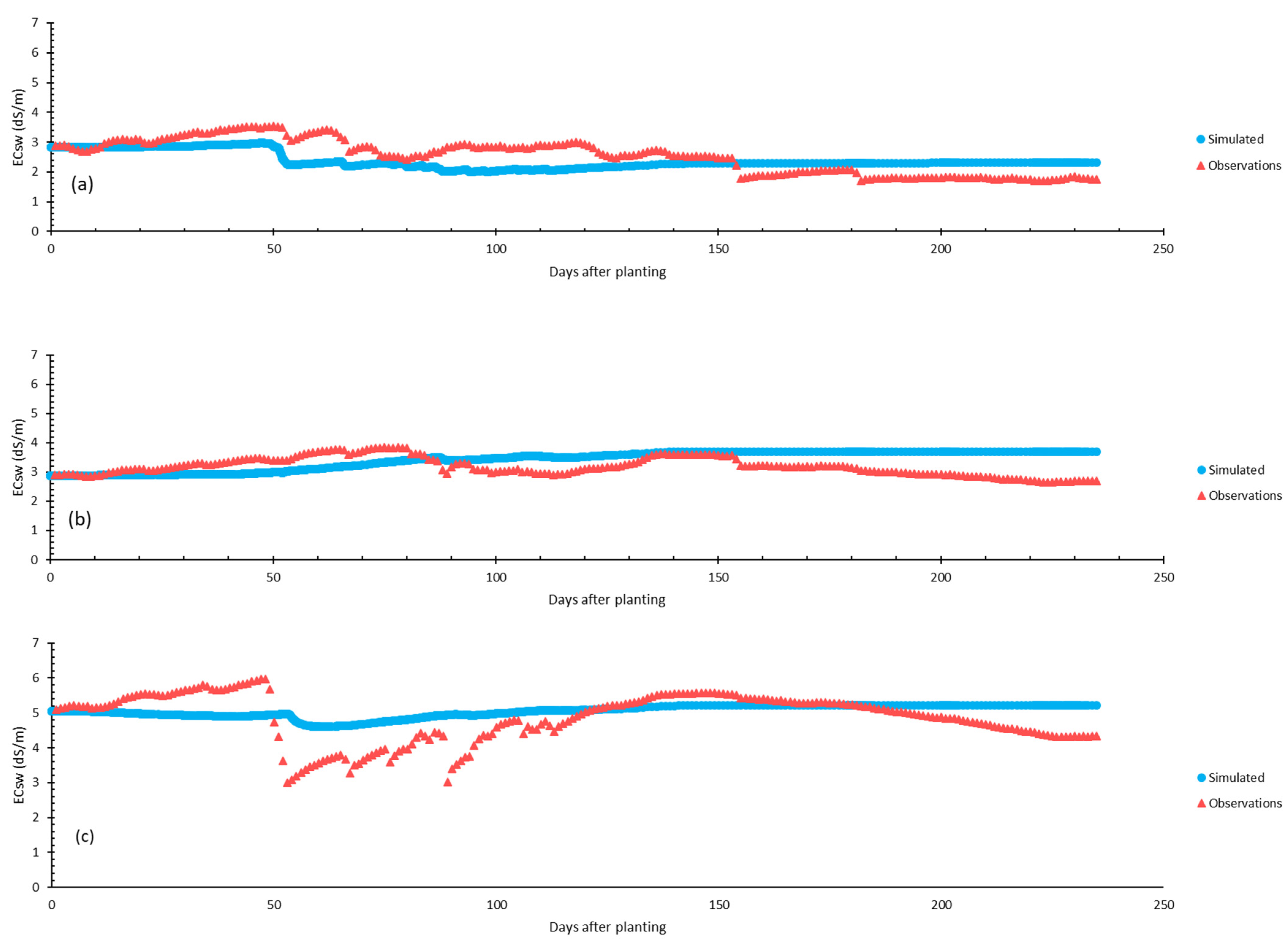
3.3. The HYDRUS-1D Model Performance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Skaggs, T.H.; Anderson, R.G.; Corwin, D.L.; Suarez, D.L. Analytical steady-state solutions for water-limited cropping systems using saline irrigation water. Water Resour. Res. 2014, 50, 9656–9674. [Google Scholar] [CrossRef]
- Bradford, S.; Letey, J. Cyclic and blending strategies for using nonsaline and saline waters for irrigation. Irrig. Sci. 1992, 13, 123–128. [Google Scholar] [CrossRef]
- Rhoades, J.D. Use of saline drainage water for irrigation. Agric. Drain. 1999, 38, 615–657. [Google Scholar]
- Sharma, D.P.; Rao, K. Strategy for long term use of saline drainage water for irrigation in semi-arid regions. Soil Tillage Res. 1998, 48, 287–295. [Google Scholar] [CrossRef]
- Mendoza-Espinosa, L.G.; Burgess, J.E.; Daesslé, L.; Villada-Canela, M. Reclaimed water for the irrigation of vineyards: Mexico and South Africa as case studies. Sustain. Cities Soc. 2019, 51, 101769. [Google Scholar] [CrossRef]
- Kramer, I.; Bayer, Y.; Mau, Y. The sustainability of treated wastewater irrigation: The impact of hysteresis on saturated soil hydraulic conductivity. Water Resour. Res. 2022, 58, e2021WR031307. [Google Scholar] [CrossRef]
- Sheng, F.; Xiuling, C. Using shallow saline groundwater for irrigation and regulating for soil salt-water regime. Irrig. Drain. Syst. 1997, 11, 1–14. [Google Scholar] [CrossRef]
- Zhang, J.; Li, K.; Gao, Y.; Feng, D.; Zheng, C.; Cao, C.; Sun, J.; Dang, H.; Hamani, A.K.M. Evaluation of saline water irrigation on cotton growth and yield using the AquaCrop crop simulation model. Agric. Water Manag. 2022, 261, 107355. [Google Scholar] [CrossRef]
- Singh, A. Soil salinization management for sustainable development: A review. J. Environ. Manag. 2021, 277, 111383. [Google Scholar] [CrossRef]
- Fathizad, H.; Ali Hakimzadeh Ardakani, M.; Sodaiezadeh, H.; Kerry, R.; Taghizadeh-Mehrjardi, R. Investigation of the spatial and temporal variation of soil salinity using random forests in the central desert of Iran. Geoderma 2020, 365, 114233. [Google Scholar] [CrossRef]
- Mostafazadeh-Fard, B.; Mansouri, H.; Mousavi, S.-F.; Feizi, M. Effects of Different Levels of Irrigation Water Salinity and Leaching on Yield and Yield Components of Wheat in an Arid Region. J. Irrig. Drain. Eng. 2009, 135, 32–38. [Google Scholar] [CrossRef]
- Kang, Y.; Chen, M.; Wan, S. Effects of drip irrigation with saline water on waxy maize (Zea mays L. var. ceratina Kulesh) in North China Plain. Agric. Water Manag. 2010, 97, 1303–1309. [Google Scholar] [CrossRef]
- Li, D.; Wan, S.; Li, X.; Kang, Y.; Han, X. Effect of water-salt regulation drip irrigation with saline water on tomato quality in an arid region. Agric. Water Manag. 2022, 261, 107347. [Google Scholar] [CrossRef]
- Corwin, D.L.; Waggoner, B.L. TETrans: A user-friendly, functional model of solute transport. Water Sci. Technol. 1991, 24, 57–65. [Google Scholar] [CrossRef]
- Oosterbaan, R.J. SALTMOD: Description of Principles, User Manual, and Examples of Application, Version 1.1; ILRI: Wageningen, The Netherlands, 2001. [Google Scholar]
- Shahrokhnia, H.; Wu, L. SALEACH: A new web-based soil salinity leaching model for improved irrigation management. Agric. Water Manag. 2021, 252, 106905. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, Y.; Mao, W.; Sun, G.; Han, X.; Wu, J.; Yang, J. Development and Application of a Water and Salt Balance Model for Well-Canal Conjunctive Irrigation in Semiarid Areas with Shallow Water Tables. Agriculture 2022, 12, 399. [Google Scholar] [CrossRef]
- Corwin, D.L.; Waggoner, B.L. TETRANS: Solute Transport Modeling Software User’s Guide; Report 121. USDA-ARS; U.S. Salinity Laboratory: Riverside, CA, USA, 1990.
- Chang, X.; Gao, Z.; Wang, S.; Chen, H. Modelling long-term soil salinity dynamics using SaltMod in Hetao Irrigation District, China. Comput. Electron. Agric. 2019, 156, 447–458. [Google Scholar] [CrossRef]
- Letey, J.; Hoffman, G.J.; Hopmans, J.W.; Grattan, S.R.; Suarez, D.; Corwin, D.L.; Oster, J.D.; Wu, L.; Amrhein, C. Evaluation of soil salinity leaching requirement guidelines. Agric. Water Manag. 2011, 98, 502–506. [Google Scholar] [CrossRef] [Green Version]
- Simunek, J.; Van Genuchten, M.T.; Sejna, M. The HYDRUS-1D software package for simulating the one-dimensional movement of water, heat, and multiple solutes in variably-saturated media. Univ. Calif.-Riverside Res. Rep. 2005, 3, 240. [Google Scholar]
- Liu, B.; Wang, S.; Liu, X.; Sun, H. Evaluating soil water and salt transport in response to varied rainfall events and hydrological years under brackish water irrigation in the North China Plain. Geoderma 2022, 422, 115954. [Google Scholar] [CrossRef]
- Noshadi, M.; Fahandej-Saadi, S.; Sepaskhah, A.R. Application of SALTMED and HYDRUS-1D models for simulations of soil water content and soil salinity in controlled groundwater depth. J. Arid Land 2020, 12, 447–461. [Google Scholar] [CrossRef]
- Kanzari, S.; Ben Nouna, B.; Ben Mariem, S.; Rezig, M. Hydrus-1D model calibration and validation in various field conditions for simulating water flow and salts transport in a semi-arid region of Tunisia. Sustain. Environ. Res. 2018, 28, 350–356. [Google Scholar] [CrossRef]
- Shaygan, M.; Baumgartl, T.; Arnold, S.; Reading, L.P. The effect of soil physical amendments on reclamation of a saline-sodic soil: Simulation of salt leaching using HYDRUS-1D. Soil Res. 2018, 56, 829–845. [Google Scholar] [CrossRef]
- Ramos, T.B.; Šimůnek, J.; Gonçalves, M.C.; Martins, J.C.; Prazeres, A.; Castanheira, N.L.; Pereira, L.S. Field evaluation of a multicomponent solute transport model in soils irrigated with saline waters. J. Hydrol. 2011, 407, 129–144. [Google Scholar] [CrossRef]
- Askri, B.; Ahmed, A.T.; Abichou, T.; Bouhlila, R. Effects of shallow water table, salinity and frequency of irrigation water on the date palm water use. J. Hydrol. 2014, 513, 81–90. [Google Scholar] [CrossRef]
- Skaggs, T.H.; Shouse, P.J.; Poss, J.A. Irrigating Forage Crops with Saline Waters: 2. Modeling Root Uptake and Drainage. Vadose Zone J. 2006, 5, 824–837. [Google Scholar] [CrossRef]
- Ali, A.; Bennett, J.M.; Biggs, A.A.J.; Marchuk, A.; Ghahramani, A. Assessing the hydraulic reduction performance of HYDRUS-1D for application of alkaline irrigation in variably-saturated soils: Validation of pH driven hydraulic reduction scaling factors. Agric. Water Manag. 2021, 256, 107101. [Google Scholar] [CrossRef]
- Phogat, V.; Yadav, A.K.; Malik, R.S.; Kumar, S.; Cox, J. Simulation of salt and water movement and estimation of water productivity of rice crop irrigated with saline water. Paddy Water Environ. 2010, 8, 333–346. [Google Scholar] [CrossRef]
- He, J.; Jones, J.W.; Graham, W.D.; Dukes, M.D. Influence of likelihood function choice for estimating crop model parameters using the generalized likelihood uncertainty estimation method. Agric. Syst. 2010, 103, 256–264. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Gupta, H.V.; Bouten, W.; Sorooshian, S. A Shuffled Complex Evolution Metropolis algorithm for optimization and uncertainty assessment of hydrologic model parameters. Water Resour. Res. 2003, 39. [Google Scholar] [CrossRef] [Green Version]
- Braak, C.J.F. Ter A Markov Chain Monte Carlo version of the genetic algorithm Differential Evolution: Easy Bayesian computing for real parameter spaces. Stat. Comput. 2006, 16, 239–249. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Ter Braak, C.J.F.; Diks, C.G.H.; Robinson, B.A.; Hyman, J.M.; Higdon, D. Accelerating Markov chain Monte Carlo simulation by differential evolution with self-adaptive randomized subspace sampling. Int. J. Nonlinear Sci. Numer. Simul. 2009, 10, 273–290. [Google Scholar] [CrossRef]
- Zhang, J.; Vrugt, J.A.; Shi, X.; Lin, G.; Wu, L.; Zeng, L. Improving Simulation Efficiency of MCMC for Inverse Modeling of Hydrologic Systems With a Kalman-Inspired Proposal Distribution. Water Resour. Res. 2020, 56, e2019WR025474. [Google Scholar] [CrossRef] [Green Version]
- Laloy, E.; Vrugt, J.A. High-dimensional posterior exploration of hydrologic models using multiple-try DREAM (ZS) and high-performance computing. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef] [Green Version]
- Vrugt, J.A.; Ter Braak, C.J.F. DREAM (D): An adaptive Markov Chain Monte Carlo simulation algorithm to solve discrete, noncontinuous, and combinatorial posterior parameter estimation problems. Hydrol. Earth Syst. Sci. 2011, 15, 3701–3713. [Google Scholar] [CrossRef] [Green Version]
- Beven, K.; Binley, A. The future of distributed models: Model calibration and uncertainty prediction. Hydrol. Process. 1992, 6, 279–298. [Google Scholar] [CrossRef]
- Makowski, D.; Wallach, D.; Tremblay, M. Using a Bayesian approach to parameter estimation; comparison of the GLUE and MCMC methods. Agronomie 2002, 22, 191–203. [Google Scholar] [CrossRef]
- Shafiei, M.; Ghahraman, B.; Saghafian, B.; Davary, K.; Pande, S.; Vazifedoust, M. Uncertainty assessment of the agro-hydrological SWAP model application at field scale: A case study in a dry region. Agric. Water Manag. 2014, 146, 324–334. [Google Scholar] [CrossRef]
- Li, Z.; He, J.; Xu, X.; Jin, X.; Huang, W.; Clark, B.; Yang, G.; Li, Z. Estimating genetic parameters of DSSAT-CERES model with the GLUE method for winter wheat (Triticum aestivum L.) production. Comput. Electron. Agric. 2018, 154, 213–221. [Google Scholar] [CrossRef] [Green Version]
- Sun, M.; Zhang, X.; Huo, Z.; Feng, S.; Huang, G.; Mao, X. Uncertainty and sensitivity assessments of an agricultural–hydrological model (RZWQM2) using the GLUE method. J. Hydrol. 2016, 534, 19–30. [Google Scholar] [CrossRef]
- Sheng, M.; Liu, J.; Zhu, A.-X.; Rossiter, D.G.; Liu, H.; Liu, Z.; Zhu, L. Comparison of GLUE and DREAM for the estimation of cultivar parameters in the APSIM-maize model. Agric. For. Meteorol. 2019, 278, 107659. [Google Scholar] [CrossRef]
- Klocke, N.L.; Currie, R.S.; Tomsicek, D.J.; Koehn, J. Corn yield response to deficit irrigation. Trans. ASABE 2011, 54, 931–940. [Google Scholar] [CrossRef]
- Araya, A.; Kisekka, I.; Gowda, P.H.; Prasad, P.V.V. Grain sorghum production functions under different irrigation capacities. Agric. Water Manag. 2018, 203, 261–271. [Google Scholar] [CrossRef]
- Helalia, S.A.; Anderson, R.G.; Skaggs, T.H.; Jenerette, G.D.; Wang, D.; Šimůnek, J. Impact of Drought and Changing Water Sources on Water Use and Soil Salinity of Almond and Pistachio Orchards: 1. Observations. Soil Syst. 2021, 5, 50. [Google Scholar] [CrossRef]
- Helalia, S.A.; Anderson, R.G.; Skaggs, T.H.; Šimůnek, J. Impact of Drought and Changing Water Sources on Water Use and Soil Salinity of Almond and Pistachio Orchards: 2. Modeling. Soil Syst. 2021, 5, 58. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop evapotranspiration-Guidelines for computing crop water requirements-FAO Irrigation and drainage paper 56. Fao Rome 1998, 300, D05109. [Google Scholar]
- Van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef] [Green Version]
- Van Genuchten, M.T. A Numerical Model for Water and Solute Movernent 1987. Available online: https://www.pc-progress.com/Documents/RVGenugten/M1987,vG,%20Worm%20USSL%20report.pdf (accessed on 9 November 2022).
- Ritchie, J.T. Model for predicting evaporation from a row crop with incomplete cover. Water Resour. Res. 1972, 8, 1204–1213. [Google Scholar] [CrossRef] [Green Version]
- Radcliffe, D.E.; Simunek, J. Soil Physics with HYDRUS: Modeling and Applications; CRC Press: Boca Raton, FL, USA, 2018; ISBN 1420073818. [Google Scholar]
- Klauer, B.; Brown, J.D. Conceptualising imperfect knowledge in public decision-making: Ignorance, uncertainty, error and risk situations. Environ. Res. Eng. Manag. 2004, 1, 124–128. [Google Scholar]
- Maas, E.V.; Hoffman, G.J. Crop salt tolerance—Current assessment. J. Irrig. Drain. Div. 1977, 103, 115–134. [Google Scholar] [CrossRef]
- Grieve, C.M.; Grattan, S.R.; Maas, E.V. Plant salt tolerance. ASCE Man. Rep. Eng. Pract. 2012, 71, 405–459. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Depth (cm) | Soil Texture | Sand (%) | Silt (%) | Clay (%) | Wilting Point (%) | Field Capacity (%) | Saturation (%) | Bulk Density (g.cm−2) |
|---|---|---|---|---|---|---|---|---|
| 0–240 | Silt loam | 18.5 | 55.5 | 26 | 15 | 33 | 45 | 1.38 |
| Units | Value | |
|---|---|---|
| EC | dS/m | 1.2 |
| SAR | (meq/L)0.5 | 2.64 |
| Na+ | mg/L | 120 |
| Ca2+ | mg/L | 58 |
| Mg2+ | mg/L | 95 |
| SO42− | mg/L | 200 |
| PO43− | mg/L | 6.3 |
| NO3− | mg/L | 118 |
| K+ | mg/L | 6.1 |
| Soil Depth (cm) | Soil Water Content (cm3.cm−3) | ECsw (dS/m) |
|---|---|---|
| 0–30 | 0.289 | 2.842 |
| 30–60 | 0.247 | 2.87 |
| 60–120 | 0.208 | 5.043 |
| 120–200 | 0.20 | 5.0 |
| Parameters | Units | Range | Mean | SD | CV |
|---|---|---|---|---|---|
| θr | - | 0.05–0.08 | 0.065 | 0.0086 | 0.1332 |
| θs | - | 0.3–0.5 | 0.4 | 0.0577 | 0.1443 |
| α | 1/cm | 0.001–0.2 | 0.1005 | 0.0574 | 0.5716 |
| Ks | cm/days | 5–40 | 22.5 | 10.1036 | 0.4490 |
| n | - | 1–3 | 2 | 0.5773 | 0.2886 |
| l | - | 0.1–1 | 0.55 | 0.2598 | 0.4723 |
| λ | cm2/day | 5–30 | 17.5 | 7.2168 | 0.4123 |
| Dlw | cm2/day | 1–2 | 1.5 | 0.2886 | 0.1924 |
| Kd | cm3/g | 0.1–1 | 0.55 | 0.2598 | 0.4723 |
| a | dS/m | 2–5 | 3.5 | 0.7500 | 0.2142 |
| b | % | 4–8 | 4.5 | 1.4433 | 0.3207 |
| h50 | cm | −5000–−800 | −2900 | 1212.43 | −0.418 |
| P1 | - | 1.5–3 | 2.25 | 0.433 | 0.19 |
| Parameters | Mean | SD | CV | Quantiles | ||||
|---|---|---|---|---|---|---|---|---|
| 2.5% | 25% | 50% | 75% | 97.5% | ||||
| θr | 0.0642 | 0.00907 | 0.14127 | 0.0505 | 0.0557 | 0.0637 | 0.0716 | 0.0796 |
| θs | 0.442 | 0.04214 | 0.09533 | 0.3417 | 0.412 | 0.4542 | 0.4743 | 0.497 |
| α | 0.0614 | 0.05269 | 0.85814 | 0.0062 | 0.018 | 0.0436 | 0.0881 | 0.185 |
| Ks | 22.97 | 9.653 | 0.42024 | 6.563 | 14.72 | 23.7 | 31.16 | 38.736 |
| n | 1.725 | 0.4497 | 0.26069 | 1.1 | 1.337 | 1.69 | 1.992 | 2.702 |
| l | 0.547 | 0.2568 | 0.46946 | 0.121 | 0.3341 | 0.5361 | 0.7533 | 0.993 |
| λ | 15.42 | 6.023 | 0.39059 | 6.416 | 10.47 | 14.65 | 19.34 | 28.428 |
| Dlw | 1.53 | 0.2738 | 0.17895 | 1.029 | 1.306 | 1.567 | 1.76 | 1.975 |
| Kd | 0.5744 | 0.2201 | 0.38318 | 0.129 | 0.4378 | 0.5898 | 0.7277 | 0.964 |
| a | 3.324 | 0.3926 | 0.11811 | 2.637 | 2.996 | 3.346 | 3.648 | 3.964 |
| b | 5.924 | 1.136 | 0.19176 | 4.122 | 4.938 | 5.993 | 6.82 | 7.873 |
| h50 | −2846 | 1238 | −0.43499 | −4942 | −3901 | −2777 | −1776 | −852.265 |
| P1 | 2.243 | 0.45 | 0.20062 | 1.523 | 1.828 | 2.24 | 2.642 | 2.952 |
| SWC | ECsw | ||||||
|---|---|---|---|---|---|---|---|
| RMSE (cm3.cm−3) | NRMSE | R2 | RMSE (dS/m) | NRMSE | R2 | ||
| Q50% | |||||||
| 16 cm | 0.003 | 0.01 | 0.84 | 0.30 | 0.11 | 0.41 | |
| 46 cm | 0.001 | 0.005 | 0.86 | 0.29 | 0.09 | 0.22 | |
| 76 cm | 0.0006 | 0.003 | 0.72 | 0.42 | 0.09 | 0.50 | |
| Q97.5% | |||||||
| 16 cm | 0.008 | 0.03 | 0.87 | 0.30 | 0.12 | 0.31 | |
| 46 cm | 0.006 | 0.02 | 0.78 | 0.16 | 0.05 | 0.13 | |
| 76 cm | 0.003 | 0.01 | 0.47 | 0.46 | 0.1 | 0.58 | |
| OptL | |||||||
| 16 cm | 0.004 | 0.02 | 0.82 | 0.23 | 0.09 | 0.6 | |
| 46 cm | 0.002 | 0.01 | 0.90 | 0.35 | 0.11 | 0.3 | |
| 76 cm | 0.0006 | 0.003 | 0.86 | 0.53 | 0.11 | 0.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moghbel, F.; Mosaedi, A.; Aguilar, J.; Ghahraman, B.; Ansari, H.; Gonçalves, M.C. Bayesian Calibration and Uncertainty Assessment of HYDRUS-1D Model Using GLUE Algorithm for Simulating Corn Root Zone Salinity under Linear Move Sprinkle Irrigation System. Water 2022, 14, 4003. https://doi.org/10.3390/w14244003
Moghbel F, Mosaedi A, Aguilar J, Ghahraman B, Ansari H, Gonçalves MC. Bayesian Calibration and Uncertainty Assessment of HYDRUS-1D Model Using GLUE Algorithm for Simulating Corn Root Zone Salinity under Linear Move Sprinkle Irrigation System. Water. 2022; 14(24):4003. https://doi.org/10.3390/w14244003
Chicago/Turabian StyleMoghbel, Farzam, Abolfazl Mosaedi, Jonathan Aguilar, Bijan Ghahraman, Hossein Ansari, and Maria C. Gonçalves. 2022. "Bayesian Calibration and Uncertainty Assessment of HYDRUS-1D Model Using GLUE Algorithm for Simulating Corn Root Zone Salinity under Linear Move Sprinkle Irrigation System" Water 14, no. 24: 4003. https://doi.org/10.3390/w14244003
APA StyleMoghbel, F., Mosaedi, A., Aguilar, J., Ghahraman, B., Ansari, H., & Gonçalves, M. C. (2022). Bayesian Calibration and Uncertainty Assessment of HYDRUS-1D Model Using GLUE Algorithm for Simulating Corn Root Zone Salinity under Linear Move Sprinkle Irrigation System. Water, 14(24), 4003. https://doi.org/10.3390/w14244003