
Evaluation of Artificial Precipitation Enhancement Using UNET-GRU Algorithm for Rainfall Estimation

Abstract
:1. Introduction
- (1)
- (2)
- (3)
- (4)
2. Related Work
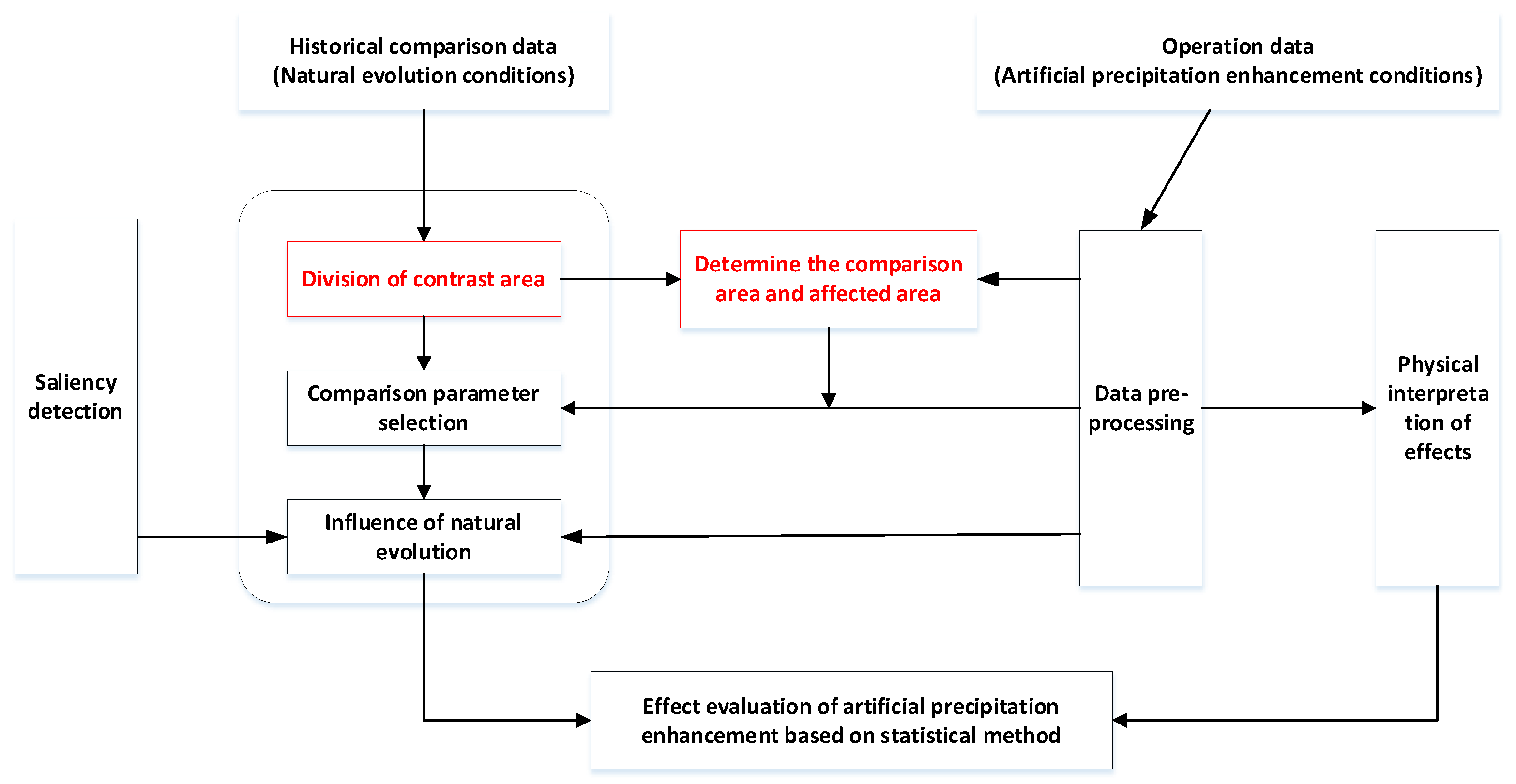
2.1. Classical Evaluation Methods Model in Meteorological Field
2.2. Application of Deep Learning Model in Meteorological Field
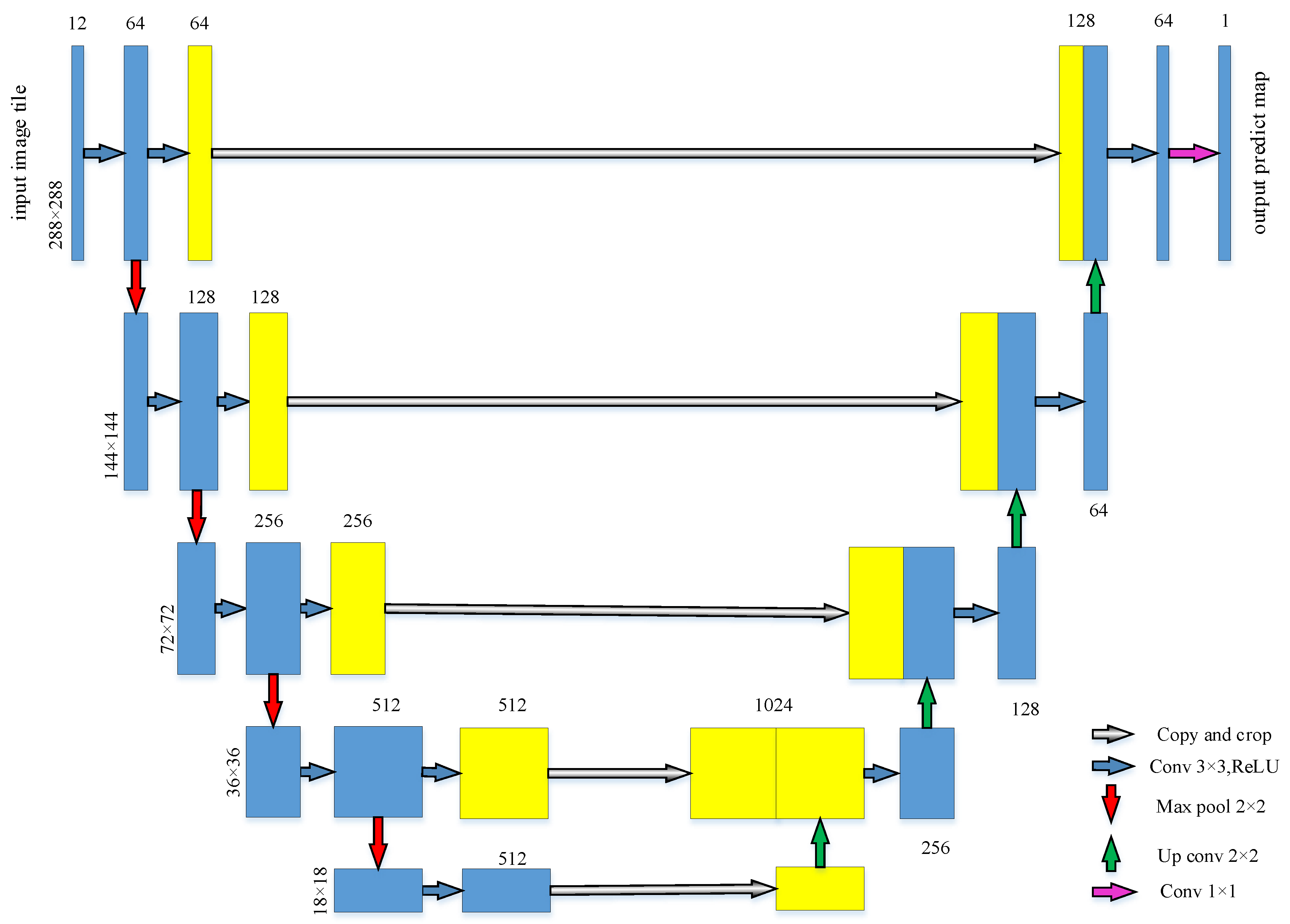
2.3. UNET
3. Methods
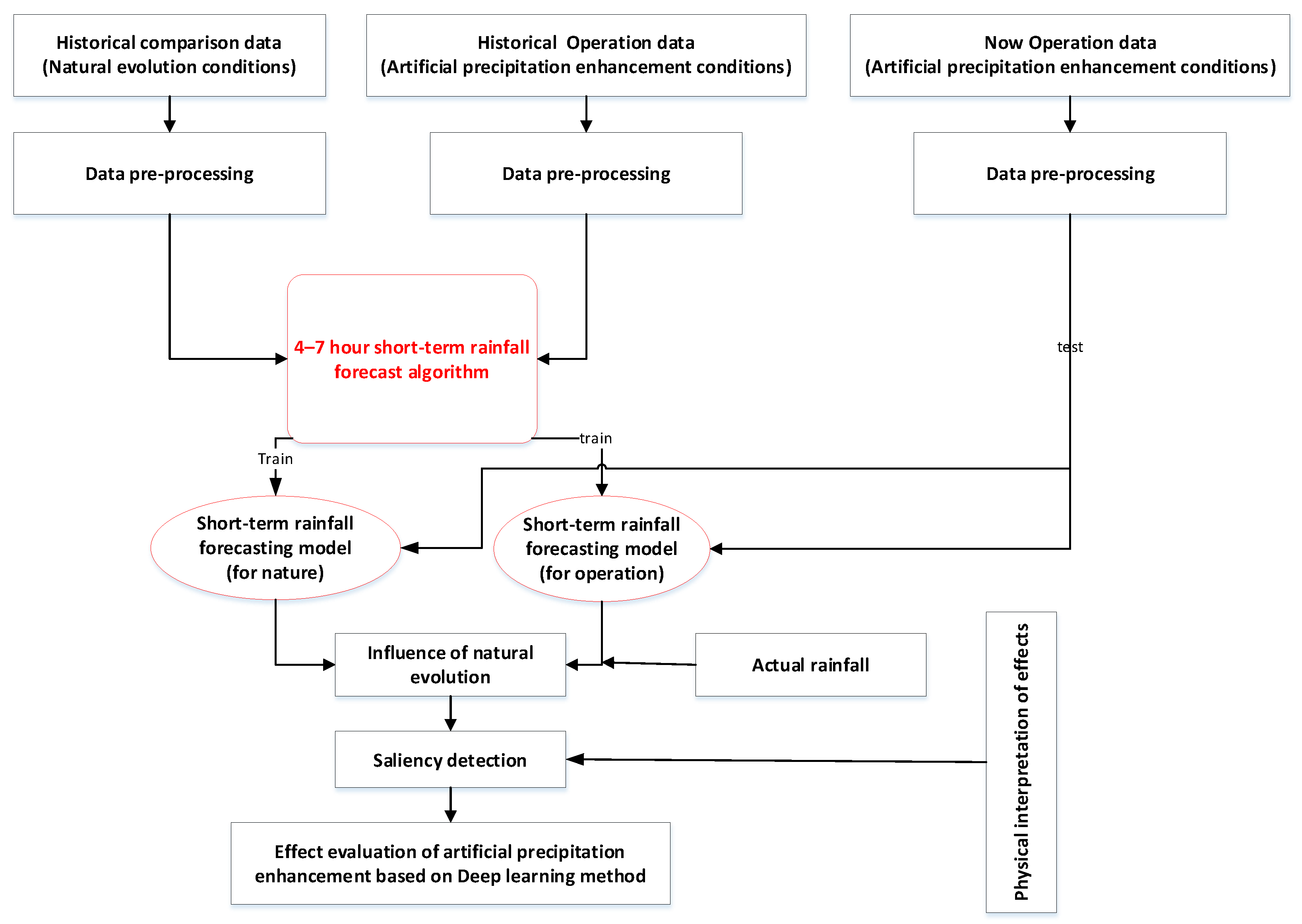
3.1. Effect Evaluation Method Based on Deep Learning
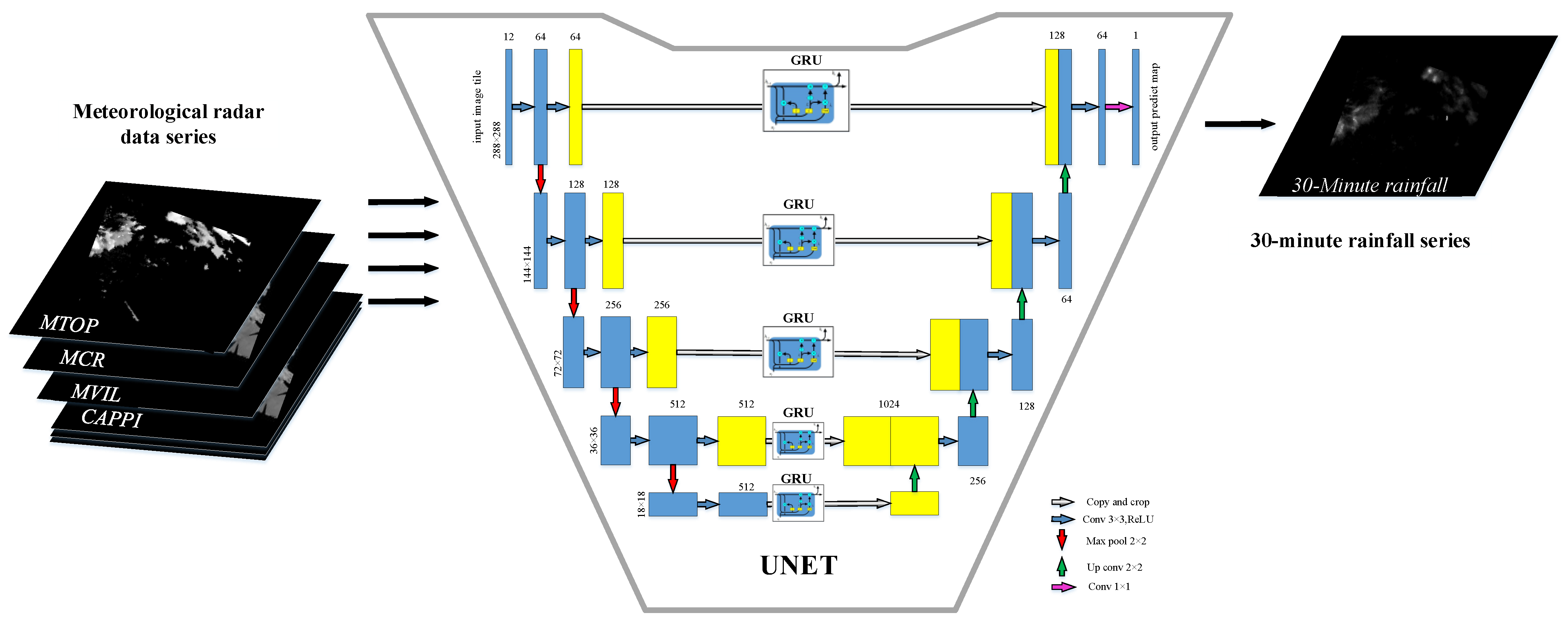
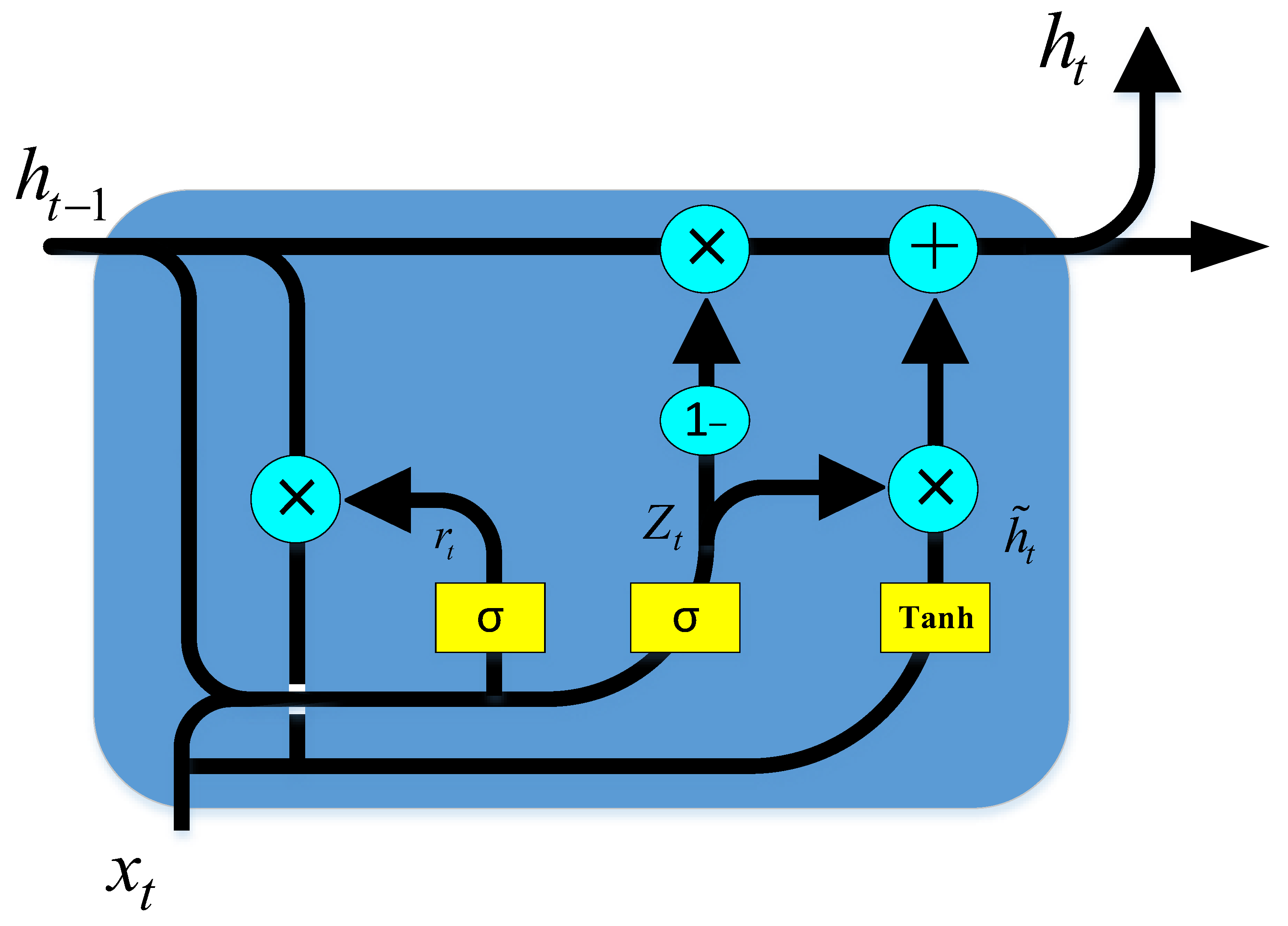
3.2. UNET-GRU Algorithm
3.3. Other Models
3.4. Training
3.5. Model Evaluation
4. Experiments
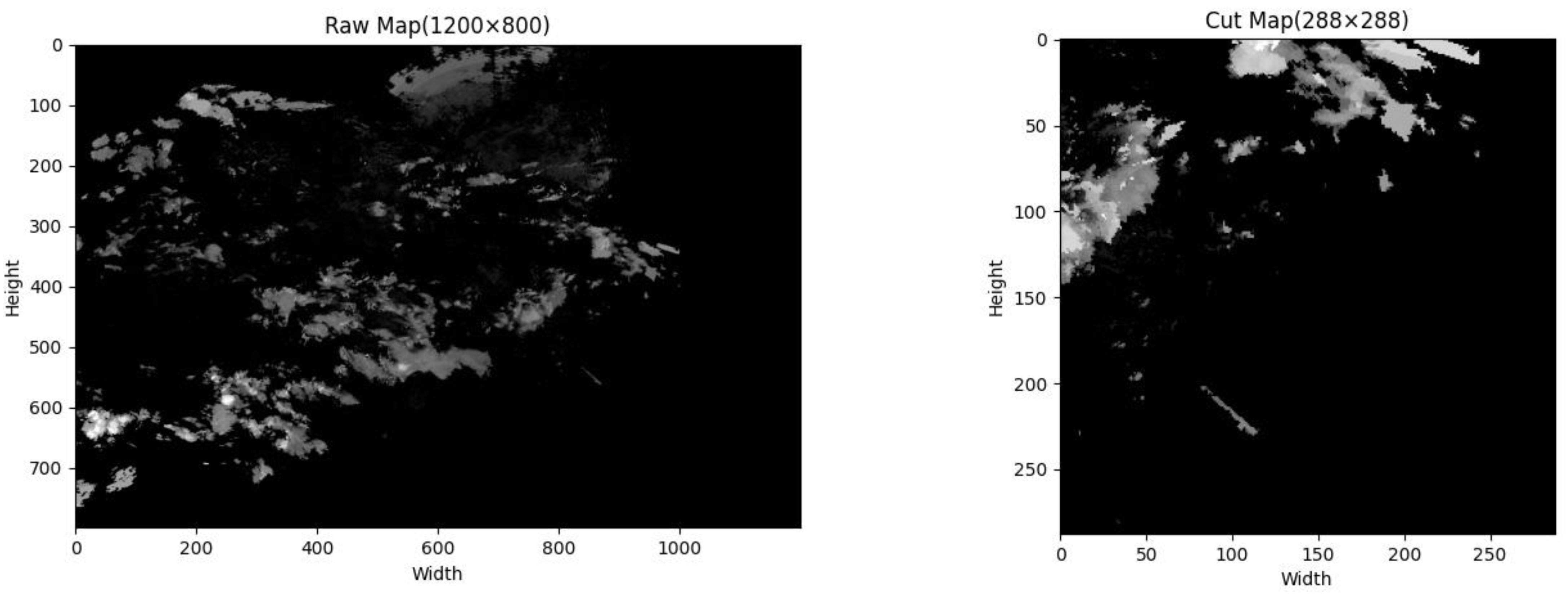
Precipitation Map Dataset
- (1)
- Based on the rainfall Z-I relationship, convert the 6-min radar real reflectivity factor Z in the past hour into the radar-estimated rainfall I, and then accumulate the 6-min radar-estimated rainfall I to obtain the hourly radar-estimated rainfall, so as to compare it with the precipitation observed by automatic ground stations.
- (2)
- In order to obtain the optimal parameters A and b for radar retrieval of precipitation, the hourly radar-estimated precipitation is R and the ground automatic station observed precipitation is G, and the error target discriminant function CTF is selected:In Equation (9), R is the hourly radar-estimated precipitation; G is the precipitation observed by the automatic ground station; n is the total logarithm of radar automatic station data matching involved in rainfall Z-I relationship fitting.In practical business applications, in order to save calculation time and ensure that parameters A and b change within a reasonable range, the adjustment ranges of A and b are limited to [150.00, 400.00] and [0.80, 2.40] respectively, and the adjustment intervals are 0.10 and 0.01 respectively. For each group of A and b, a CTF can be obtained. By constantly adjusting the combination of A and b, it is determined that the Z-I relationship of precipitation determined by Equation (9) A and b whose error objective discriminant function CTF reaches the minimum is optimal.
- (3)
- Convert the precipitation Z-I relationship obtained in step (2) of the 6-min radar reflectivity factor prediction field within the current 1 hour into precipitation, and then accumulate it into hourly radar quantitative precipitation retrieval data to meet the needs of precipitation inspection.
5. Results and Discussion
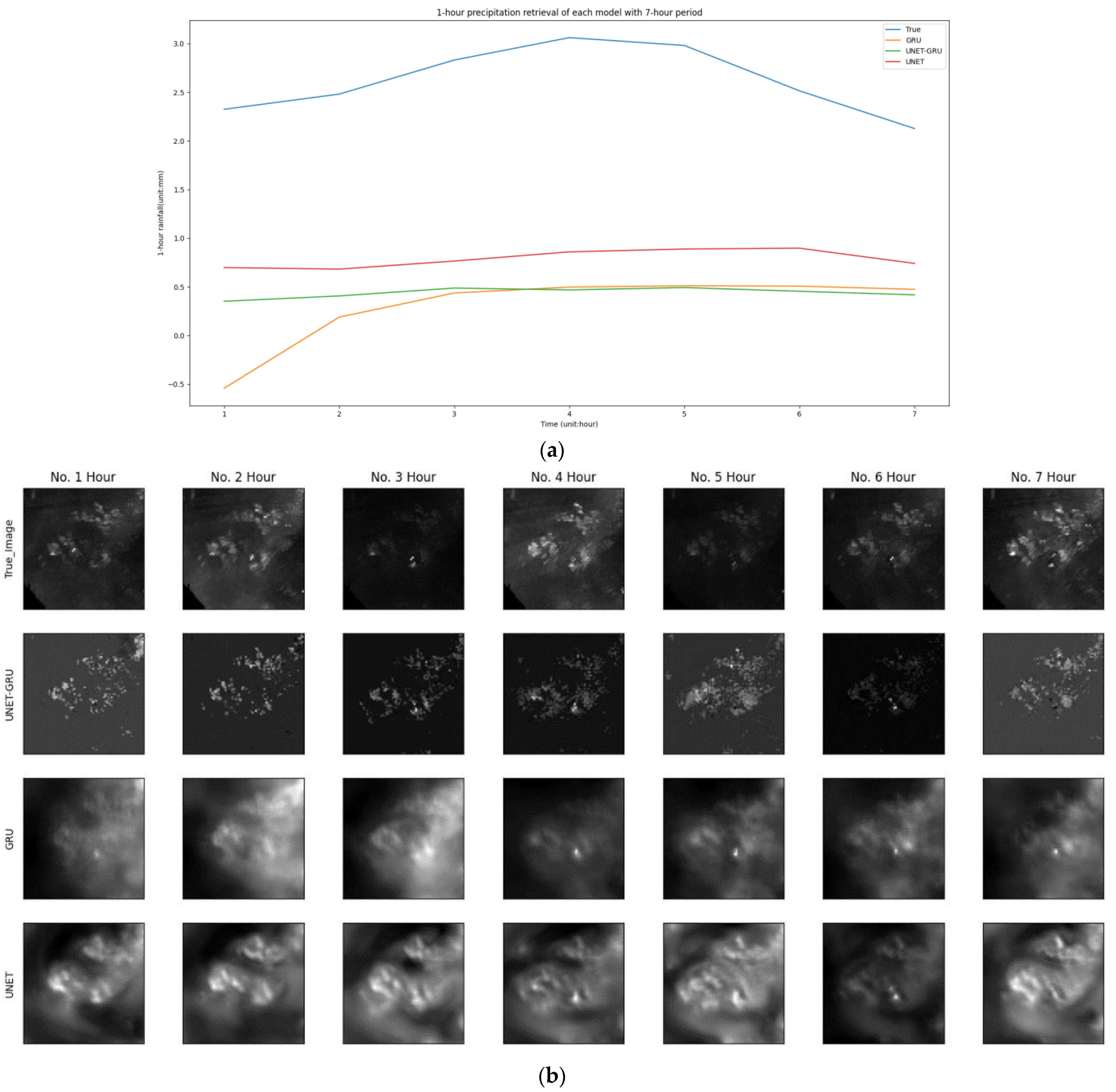
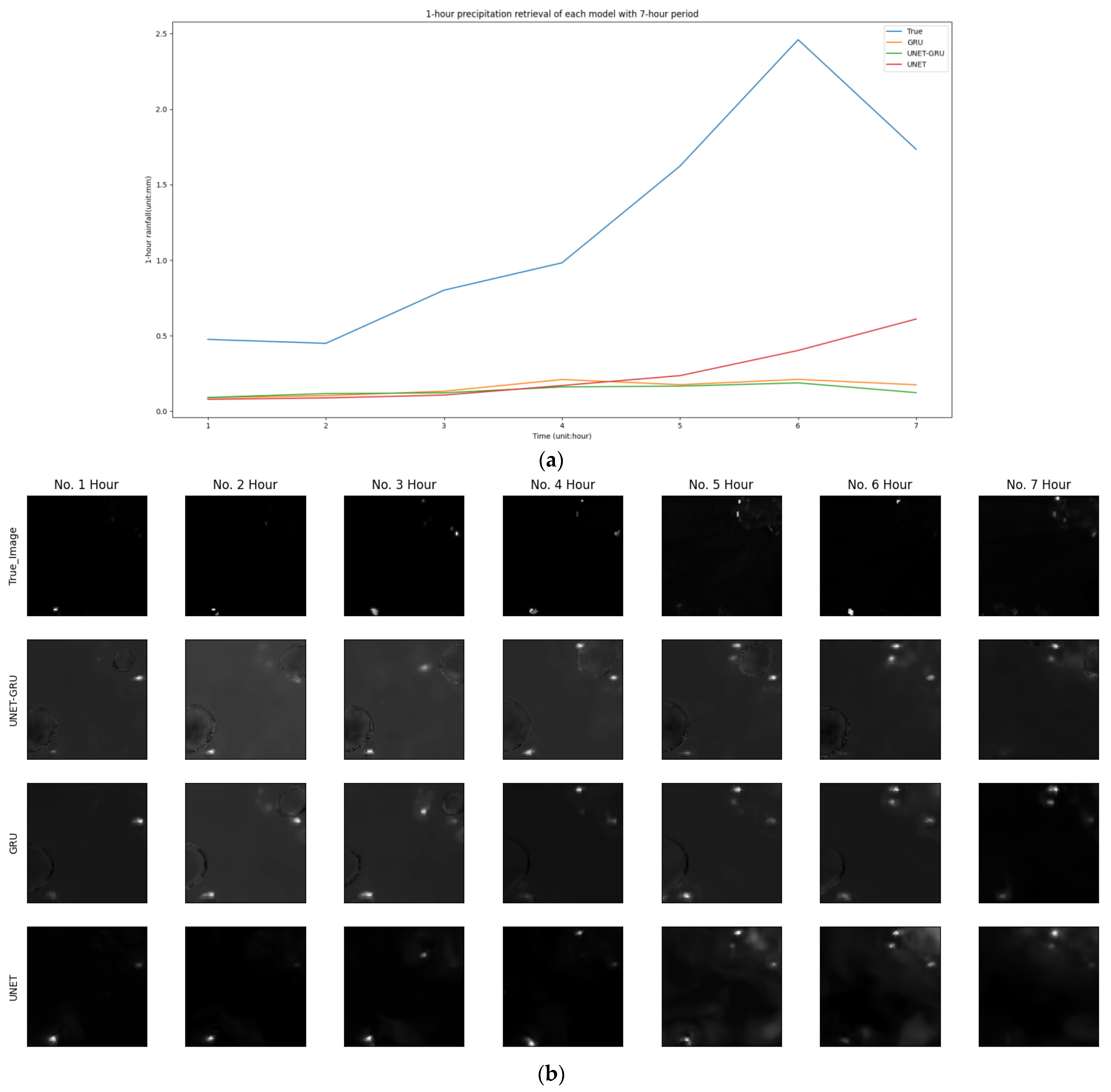
5.1. Evaluation on Precipitation Map Dataset
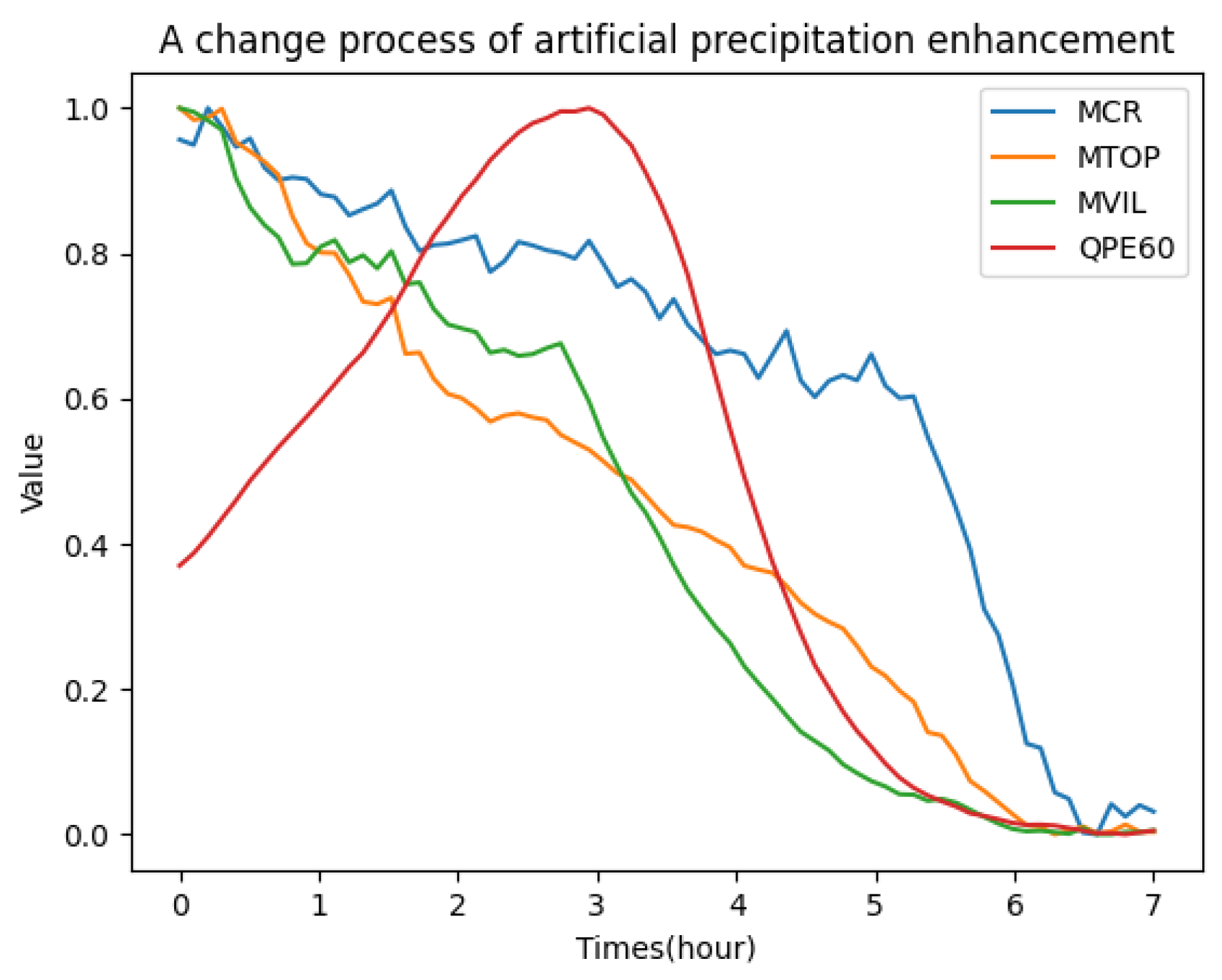
5.2. Evaluate the Effect of Rainfall Enhancement
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Silverman, B.A. A critical assessment of glaciogenic seeding of convective clouds for rainfall enhancement. Bull. Am. Meteorol. Soc. 2001, 82, 903–924. [Google Scholar] [CrossRef]
- National Research Council. Critical Issues in Weather Modification Research; National Academies Press: Washington, DC, USA, 2004. [Google Scholar] [CrossRef]
- World Meteorological Organization. WMO Statement on the Status of the Global Climate in 2014. Environ. Policy Collect. 2015, 40, 144–151. Available online: https://library.wmo.int/doc_num.php?explnum_id=7907 (accessed on 23 March 2015).
- Flossmann, A.I.; Manton, M.; Abshaev, A.; Bruintjes, R.; Murakami, M.; Prabhakaran, T.; Yao, Z. Review of advances in precipitation enhancement research. Bull. Am. Meteorol. Soc. 2019, 100, 1465–1480. [Google Scholar] [CrossRef]
- Gabriel, K.R. Ratio statistics for randomized experiments in precipitation stimulation. J. Appl. Meteorol. Climatol. 1999, 38, 290–301. [Google Scholar] [CrossRef]
- Woodley, W.L.; Rosenfeld, D.; Silverman, B.A. Results of on-top glaciogenic cloud seeding in Thailand. Part I: The demonstration experiment. J. Appl. Meteorol. 2003, 42, 920–938. [Google Scholar] [CrossRef]
- Woodley, W.L.; Rosenfeld, D.; Silverman, B.A. Results of on-top glaciogenic cloud seeding in Thailand. Part II: Exploratory analyses. J. Appl. Meteorol. Climatol. 2003, 42, 939–951. [Google Scholar] [CrossRef]
- Griffith, D.A.; Yorty, D.P. A brief history of evaluations performed on the operational Kings River winter orographic cloud seeding program. J. Weather Modif. 2014, 46, 29–36. [Google Scholar] [CrossRef]
- Wu, X.H.; Niu, S.J.; Jin, D.Z.; Sun, H. Influence of natural rainfall variability on the evaluation of artificial precipitation enhancement. Sci. China Earth Sci. 2015, 58, 906–914. [Google Scholar] [CrossRef]
- Hsu, P.C.; Lee, J.Y.; Ha, K.J.; Tsou, C.-H. Influences of boreal summer intraseasonal oscillation on heat waves in monsoon Asia. J. Clim. 2017, 30, 7191–7211. [Google Scholar] [CrossRef]
- Wu, X.; Yan, N.; Yu, H.; Niu, S.; Meng, F.; Liu, W.; Sun, H. Advances in the evaluation of cloud seeding: Statistical evidence for the enhancement of precipitation. Earth Space Sci. 2018, 5, 425–439. [Google Scholar] [CrossRef]
- Srinivas, V.V. Regionalization of precipitation in India—A review. J. Indian Inst. Sci. 2013, 93, 153–162. [Google Scholar]
- Liu, L.; Xu, Z.X. Regionalization of precipitation and the spatiotemporal distribution of extreme precipitation in southwestern China. Nat. Hazards 2016, 80, 1195–1211. [Google Scholar] [CrossRef]
- Fazel, N.; Berndtsson, R.; Uvo, C.B.; Madani, K.; Kløve, B. Regionalization of precipitation characteristics in Iran’s Lake Urmia basin. Theor. Appl. Climatol. 2018, 132, 363–373. [Google Scholar] [CrossRef]
- Mannan, A.; Chaudhary, S.; Dhanya, C.T.; Swamy, A.K. Regionalization of rainfall characteristics in India incorporating climatic variables and using self-organizing maps. ISH J. Hydraul. Eng. 2018, 24, 147–156. [Google Scholar] [CrossRef]
- Xueliang, G.; Chungang, F.; Guangxian, L.; Xiaofeng, L.; Zhengjun, S.; Ziping, Y.; Peiren, L.; Zehou, Y. Progresses of weather modification technologies and applications in China from 2008 to 2018. J. Appl. Meteorol. 2019, 30, 641–650. [Google Scholar] [CrossRef]
- Mazzetti, T.; Geerts, B.; Xue, L. A Numerical Evaluation of the Impact of Operational Ground-Based Glaciogenic Cloud Seeding on Precipitation over the Wind River Range, Wyoming. J. Appl. Meteorol. Climatol. 2023, 62, 489–510. [Google Scholar] [CrossRef]
- Axisa, D.; DeFelice, T.P. Modern and prospective technologies for weather modification activities: A look at integrating unmanned aircraft systems. Atmos. Res. 2016, 178, 114–124. [Google Scholar] [CrossRef]
- Rasmussen, R.M.; Tessendorf, S.A.; Xue, L.; Weeks, C.; Ikeda, K.; Landolt, S.; Breed, D.; Deshler, T.; Lawrence, B. Evaluation of the Wyoming Weather Modification Pilot Project (WWMPP) using two approaches: Traditional statistics and ensemble modeling. J. Appl. Meteorol. Climatol. 2018, 57, 2639–2660. [Google Scholar] [CrossRef]
- Mielke, P.W. Design and evaluation of weather modification experiments. In Probability, Statistics, and Decision Making in the Atmospheric Sciences; CRC Press: Boca Raton, FL, USA, 2019; pp. 439–459. ISBN 9780429303081. [Google Scholar]
- Wehbe, Y.; Temimi, M.; Adler, R.F. Enhancing precipitation estimates through the fusion of weather radar, satellite retrievals, and surface parameters. Remote Sens. 2020, 12, 1342. [Google Scholar] [CrossRef]
- Simpson, J.; Woodley, W.L.; Miller, A.H.; Cotton, G.F. Precipitation results of two randomized pyrotechnic cumulus seeding experiments. J. Appl. Meteorol. Climatol. 1971, 10, 526–544. [Google Scholar] [CrossRef]
- Wang, M.; Chen, J.; Li, J.; Wang, J.; Xie, H. Statistic evaluation of low-frequency acoustic wave impact on rainfall stimulation. Stoch. Environ. Res. Risk Assess. 2023, 37, 611–623. [Google Scholar] [CrossRef]
- Zheng, W.; Xue, F.; Zhang, M.; Wu, Q.; Yang, Z.; Ma, S.; Liang, H.; Wang, C.; Wang, Y.; Ai, X.; et al. Charged particle (negative ion)-based cloud seeding and rain enhancement trial design and implementation. Water 2020, 12, 1644. [Google Scholar] [CrossRef]
- Zheng, W.; Ma, H.; Zhang, M.; Xue, F.; Yu, K.; Yang, Y.; Ma, S.; Wang, C.; Pan, Y.; Shu, Z.; et al. Evaluation of the First Negative Ion-Based Cloud Seeding and Rain Enhancement Trial in China. Water 2021, 13, 2473. [Google Scholar] [CrossRef]
- Wei, X.; Shi, Y.; Qin, F.; Zhou, H.; Shao, X. Effects of experimental warming, precipitation increase and their interaction on AM fungal community in an alpine grassland of the Qinghai-Tibetan Plateau. Eur. J. Soil Biol. 2021, 102, 103272. [Google Scholar] [CrossRef]
- Dou, H.; Ming, D.; Yang, Z.; Pan, Z.; Li, Y.; Tian, J. Object-based visual saliency via laplacian regularized kernel regression. IEEE Trans. Multimed. 2017, 19, 1718–1729. [Google Scholar] [CrossRef]
- Ma, J.; Zhao, J.; Tian, J.; Yuille, A.L.; Tu, Z. Robust point matching via vector field consensus. IEEE Trans. Image Process. 2014, 23, 1706–1721. [Google Scholar] [CrossRef]
- Sun, S.; Liu, R.; Wen, W. Unsupervised classification method for polarimetric synthetic aperture radar imagery based on Yamaguchi four-component decomposition model. J. Electr. Comput. Eng. 2015, 2015, 39. [Google Scholar] [CrossRef]
- Yang, C.; Zhou, H.; Sun, S.; Liu, R.; Zhao, J.; Ma, J. Good match exploration for infrared face recognition. Infrared Phys. Technol. 2014, 67, 111–115. [Google Scholar] [CrossRef]
- Heming, J.T.; Prates, F.; Bender, M.A.; Bowyer, R.; Cangialosi, J.; Caroff, P.; Coleman, T.; Doyle, J.D.; Dube, A.; Faure, G.; et al. Review of recent progress in tropical cyclone track forecasting and expression of uncertainties. Trop. Cyclone Res. Rev. 2019, 8, 181–218. [Google Scholar] [CrossRef]
- Farzin, S.; Anaraki, M.V.; Naeimi, M.; Zandifar, S. Prediction of groundwater table and drought analysis; a new hybridization strategy based on bi-directional long short-term model and the Harris hawk optimization algorithm. J. Water Clim. Chang. 2022, 13, 2233–2254. [Google Scholar] [CrossRef]
- Valikhan Anaraki, M.; Mahmoudian, F.; Nabizadeh Chianeh, F.; Farzin, S. Dye Pollutant Removal from Synthetic Wastewater: A New Modeling and Predicting Approach Based on Experimental Data Analysis, Kriging Interpolation Method, and Computational Intelligence Techniques. J. Environ. Inform. 2022, 40, 84–94. [Google Scholar] [CrossRef]
- Xiao, Y.; Su, X.; Yuan, Q.; Liu, D.; Shen, H.; Zhang, L. Satellite video super-resolution via multiscale deformable convolution alignment and temporal grouping projection. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5610819. [Google Scholar] [CrossRef]
- Xiao, Y.; Yuan, Q.; Jiang, K.; He, J.; Wang, Y.; Zhang, L. From degrade to upgrade: Learning a self-supervised degradation guided adaptive network for blind remote sensing image super-resolution. Inf. Fusion 2023, 96, 297–311. [Google Scholar] [CrossRef]
- Jiang, K.; Wang, Z.; Yi, P.; Chen, C.; Wang, Z.; Wang, X.; Jiang, J.; Lin, C.W. Rain-free and residue hand-in-hand: A progressive coupled network for real-time image deraining. IEEE Trans. Image Process. 2021, 30, 7404–7418. [Google Scholar] [CrossRef] [PubMed]
- Trebing, K.; Staǹczyk, T.; Mehrkanoon, S. SmaAt-UNet: Precipitation nowcasting using a small attention-UNet architecture. Pattern Recognit. Lett. 2021, 145, 178–186. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.-Y.; Wong, W.-k.; Woo, W.-C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. arXiv 2015, arXiv:1506.04214. [Google Scholar]
- Jing, J.; Li, Q.; Peng, X. MLC-LSTM: Exploiting the spatiotemporal correlation between multi-level weather radar echoes for echo sequence extrapolation. Sensors 2019, 19, 3988. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Proceedings, Part III 18, Munich, Germany, 5–9 October 2015; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Shi, X.; Gao, Z.; Lausen, L.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Deep learning for precipitation nowcasting: A benchmark and a new model. arXiv 2017, arXiv:1706.03458. [Google Scholar]
- Agrawal, S.; Barrington, L.; Bromberg, C.; Burge, J.; Gazen, C.; Hickey, J. Machine learning for precipitation nowcasting from radar images. arXiv 2019, arXiv:1912.12132. [Google Scholar]
- Abbas, M.; Nazir, T.; Lampert, T.A.; Radenović, S. Common fixed points of set-valued F-contraction mappings on domain of sets endowed with directed graph. Comput. Appl. Math. 2017, 36, 1607–1622. [Google Scholar] [CrossRef]
- Shukla, S.; Radenović, S.; Vetro, C. Graphical metric space: A generalized setting in fixed point theory. Revista de la Real Academia de Ciencias Exactas, Físicas y Naturales. Serie A. Matemáticas 2017, 111, 641–655. [Google Scholar] [CrossRef]
- Todorčević, V. Harmonic Quasiconformal Mappings and Hyperbolic Type Metrics; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Tang, L.; Deng, Y.; Ma, Y.; Huang, J.; Ma, J. SuperFusion: A versatile image registration and fusion network with semantic awareness. IEEE/CAA J. Autom. Sin. 2022, 9, 2121–2137. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Parameters |
|---|---|
| UNET | 17,272,577 |
| CoGRU 2 | 210,701 |
| UNET-GRU | 21,555,009 |
| Season | Altitude (Unit: m) | MCR (Unit: dbz) | MTOP (Unit: km) | MVIL (Unit: kg/m3) |
|---|---|---|---|---|
| Spring (March to May) | <1000 | >20 | >4 | >5 |
| Summer (June to August) | <1000 | >25 | >5 | >10 |
| Autumn (September to November) | <1000 | >20 | >5 | >5 |
| Winter (December to February) | <1000 | >15 | >4 | >5 |
| Model | MSE ↓ | Accuracy ↑ | Precision ↑ | Recall ↑ | F1 ↑ | CSI ↑ | FAR ↓ | HSS ↑ |
|---|---|---|---|---|---|---|---|---|
| Persistence (baseline) | 1.1697 | 0.7264 | 0.7315 | 0.8313 | 0.729 | 0.5735 | 0.2736 | 0.4039 |
| UNet | 0.1239 | 0.6615 | 0.8530 | 0.7913 | 0.5078 | 0.3403 | 0.3385 | 0.3951 |
| CoGRU | 0.1542 | 0.6294 | 0.6643 | 0.8042 | 0.5216 | 0.3529 | 0.3706 | 0.4238 |
| UNet-GRU | 0.1182 | 0.6311 | 0.874 | 0.8462 | 0.5192 | 0.3506 | 0.3689 | 0.4139 |
| No. | Date | Rockets (pcs) | Start Time | End Time | Conditions before op. | Conditions after op. | Area (km2) | Effect | Region |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 30 July 2017 | 6 | 05:58:10 | 06:52:40 | Light to moderate rain | Moderate to heavy rain | 400 | good | Wuhan |
| 2 | 26 April 2018 | 4 | 00:06:32 | 00:48:22 | overcast | light rain | 360 | good | Shiyan |
| No. | Date | Start Time | Duration | Naturally Evolved Rainfall | Actual Rainfall | Residual Rainfall | Effect | Region |
|---|---|---|---|---|---|---|---|---|
| 1 | 30 July 2017 | 05:58:10 | 7 h | 3.56 mm | 18.91 mm | 15.35 mm | good | Wuhan |
| 2 | 26 April 2018 | 00:06:32 | 7 h | 1.05 mm | 11.03 mm | 9.98 mm | good | Shiyan |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Zhou, H.; Li, D.; Zeng, L.; Xu, P. Evaluation of Artificial Precipitation Enhancement Using UNET-GRU Algorithm for Rainfall Estimation. Water 2023, 15, 1585. https://doi.org/10.3390/w15081585
Liu R, Zhou H, Li D, Zeng L, Xu P. Evaluation of Artificial Precipitation Enhancement Using UNET-GRU Algorithm for Rainfall Estimation. Water. 2023; 15(8):1585. https://doi.org/10.3390/w15081585
Chicago/Turabian StyleLiu, Renfeng, Huabing Zhou, Dejun Li, Liping Zeng, and Peihua Xu. 2023. "Evaluation of Artificial Precipitation Enhancement Using UNET-GRU Algorithm for Rainfall Estimation" Water 15, no. 8: 1585. https://doi.org/10.3390/w15081585
APA StyleLiu, R., Zhou, H., Li, D., Zeng, L., & Xu, P. (2023). Evaluation of Artificial Precipitation Enhancement Using UNET-GRU Algorithm for Rainfall Estimation. Water, 15(8), 1585. https://doi.org/10.3390/w15081585