
Classifying the Nunivak Island Coastline Using the Random Forest Integration of the Sentinel-2 and ICESat-2 Data


Abstract
:1. Introduction
2. Study Area and Materials
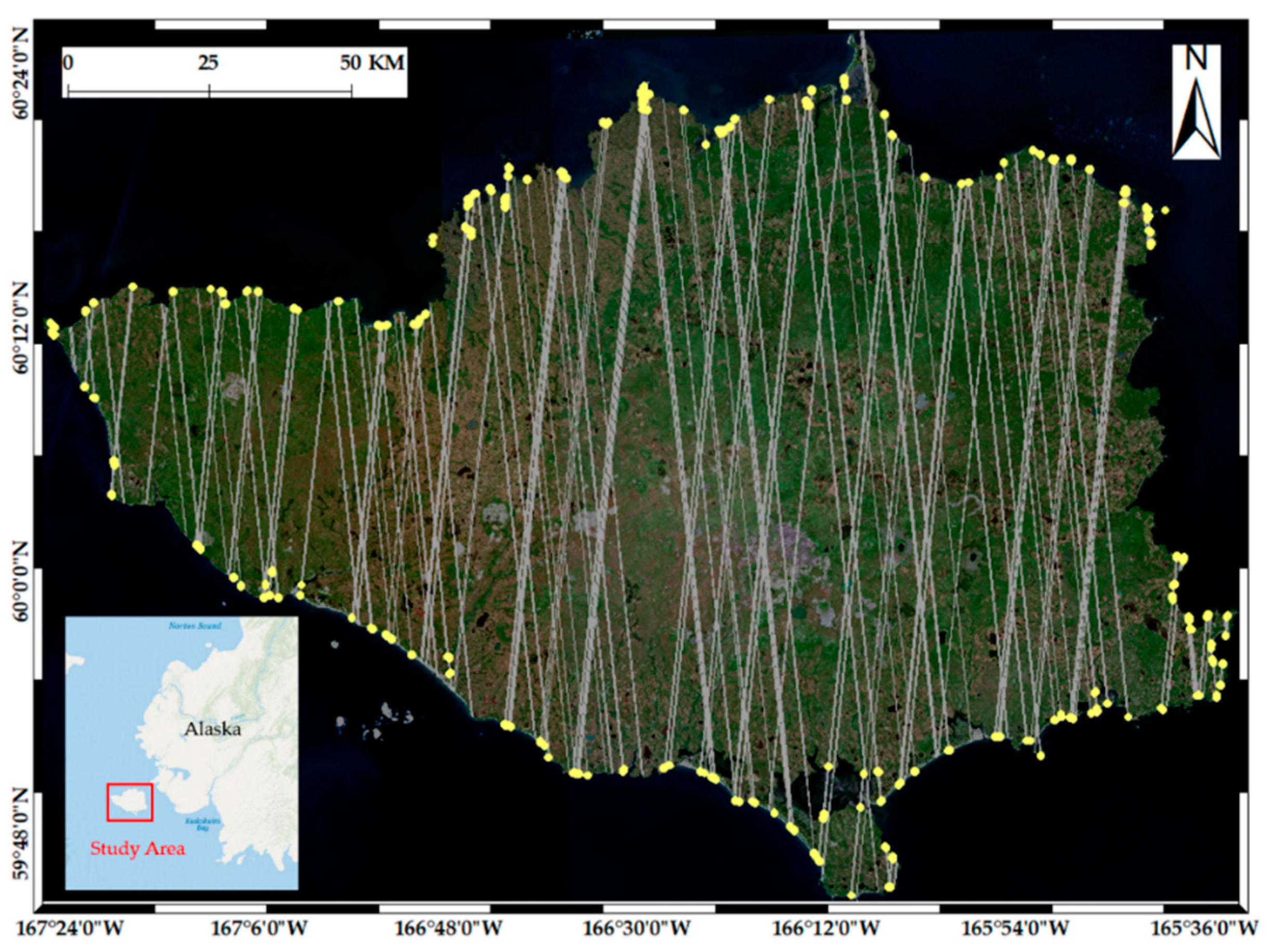
2.1. Study Area
2.2. Materials
3. Methods
3.1. Sentinel-2 Data Processing
3.2. ICESat-2 Data Processing
3.3. Sample Data Selection
3.4. Random Forests and Feature Optimization
4. Results
4.1. Importance of Variables
4.2. Classification Results of Shore Zone
5. Discussions
5.1. Misclassification Analysis
5.2. Analysis of Important Variables
5.3. Contributions of ICESat-2
5.4. Superiority, Limitations, and Suggestions
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Substrate | Sediment | With | Slope | Coastal Class |
|---|---|---|---|---|
| Rock | n/a | Wide (>30 m) | Steep (>20 degree) | n/a |
| Inclined (5–20 degree) | Rock Ramp, wide (1) | |||
| Flat (<5 degree) | Rock Platform, wide (2) | |||
| Narrow (<30 m) | Steep (>20 degree) | Rock Cliff (3) | ||
| Inclined (5–20 degree) | Rock Ramp, narrow (4) | |||
| Flat (<5 degree) | Rock Platform, narrow (5) | |||
| Rock & Sediment | Gravel | Wide (>30 m) | Steep (>20 degree) | n/a |
| Inclined (5–20 degree) | Ramp with gravel beach, wide (6) | |||
| Flat (<5 degree) | Platform with gravel beach, wide (7) | |||
| Narrow (<30 m) | Steep (>20 degree) | Cliff with gravel beach (8) | ||
| Inclined (5–20 degree) | Ramp with gravel beach (9) | |||
| Flat (<5 degree) | Platform with gravel beach (10) | |||
| Gravel & Sand | Wide (>30 m) | Steep (>20 degree) | n/a | |
| Inclined (5–20 degree) | Ramp with gravel/sand beach, wide (11) | |||
| Flat (<5 degree) | Platform with gravel/sand beach, wide (12) | |||
| Narrow (<30 m) | Steep (>20 degree) | Cliff with gravel/sand beach (13) | ||
| Inclined (5–20 degree) | Ramp with gravel/sand beach (14) | |||
| Flat (<5 degree) | Platform with gravel/sand beach (15) | |||
| Sand | Wide (>30 m) | Steep (>20 degree) | n/a | |
| Inclined (5–20 degree) | Ramp with sand beach, wide (16) | |||
| Flat (<5 degree) | Platform with sand beach, wide (17) | |||
| Narrow (<30 m) | Steep (>20 degree) | Cliff with sand beach (18) | ||
| Inclined (5–20 degree) | Ramp with sand beach (19) | |||
| Flat (<5 degree) | Platform with sand beach (20) | |||
| Sediment | Gravel | Wide (>30 m) | Flat (<20 degree) | Gravel flat, wide (21) |
| Narrow (<30 m) | Steep (>20 degree) | n/a | ||
| Inclined (5–20 degree) | Gravel beach, narrow (22) | |||
| Flat (<5 degree) | Gravel flat or fan (23) | |||
| Gravel & Sand | Wide (>30 m) | Steep (>20 degree) | n/a | |
| Inclined (5–20 degree) | n/a | |||
| Flat (<5 degree) | Sand/Gravel flat or fan (24) | |||
| Narrow (<30 m) | Steep (>20 degree) | n/a | ||
| Inclined (5–20 degree) | Sand/Gravel beach, narrow (25) | |||
| Flat (<5 degree) | Sand/Gravel flat or fan (26) | |||
| Sand & Mud | Wide (>30 m) | Steep (>20 degree) | n/a | |
| Inclined (5–20 degree) | Sand beach (27) | |||
| Flat (<5 degree) | Sand flat (28) | |||
| Flat (<5 degree) | Mudflat (29) | |||
| Narrow (<30 m) | Steep (>20 degree) | n/a | ||
| Inclined (5–20 degree) | Sand beach (30) | |||
| Flat (<5 degree) | n/a |
References
- Nicholls, R.J.; Cazenave, A. Sea-level rise and its impact on coastal zones. Science 2010, 328, 1517–1520. [Google Scholar] [CrossRef] [PubMed]
- Murray, N.J.; Phinn, S.R.; DeWitt, M.; Ferrari, R.; Johnston, R.; Lyons, M.B.; Clinton, N.; Thau, D.; Fuller, R.A. The global distribution and trajectory of tidal flats. Nature 2019, 565, 222–225. [Google Scholar] [CrossRef] [PubMed]
- Gon, C.C.; Alves, G.; Santos, S.; Duarte, D.; Gomes, J.E. Monitoring Local Shoreline Changes by Integrating UASs, Airborne LiDAR, Historical Images and Orthophotos. GISTAM 2019, 126–134. [Google Scholar] [CrossRef]
- Xu, W.; Guo, K.; Liu, Y.; Tian, Z.; Tang, Q.; Dong, Z.; Li, J. Refraction error correction of Airborne LiDAR Bathymetry data considering sea surface waves. Int. J. Appl. Earth Obs. 2021, 102, 102402. [Google Scholar] [CrossRef]
- Bishop-Taylor, R.; Nanson, R.; Sagar, S.; Lymburner, L. Mapping Australia’s dynamic coastline at mean sea level using three decades of Landsat imagery. Remote Sens. Environ. 2021, 267, 112734. [Google Scholar] [CrossRef]
- Poursanidis, D.; Traganos, D.; Reinartz, P.; Chrysoulakis, N. On the use of Sentinel-2 for coastal habitat mapping and satellite-derived bathymetry estimation using downscaled coastal aerosol band. Int. J. Appl. Earth Obs. 2019, 80, 58–70. [Google Scholar] [CrossRef]
- Mishra, M.K.; Ganguly, D.; Chauhan, P.; Ajai. Estimation of coastal bathymetry using RISAT-1 C-band microwave SAR data. IEEE Geosci. Remote Sens. Lett. 2014, 11, 671–675. [Google Scholar] [CrossRef]
- Nandy, S.; Srinet, R.; Padalia, H. Mapping Forest Height and Aboveground Biomass by Integrating ICESat-2, Sentinel-1 and Sentinel-2 Data Using Random Forest Algorithm in Northwest Himalayan Foothills of India. Geophys. Res. Lett. 2021, 48, e2021GL093799. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Neumann, T.A.; Martino, A.J.; Markus, T.; Bae, S.; Bock, M.R.; Brenner, A.C.; Brunt, K.M.; Cavanaugh, J.; Fernandes, S.T.; Hancock, D.W.; et al. The Ice, Cloud, and Land Elevation Satellite—2 mission: A global geolocated photon product derived from the Advanced Topographic Laser Altimeter System. Remote Sens. Environ. 2019, 233, 111325. [Google Scholar] [CrossRef] [PubMed]
- Mas, J.F.; Flores, J.J. The application of artificial neural networks to the analysis of remotely sensed data. Int. J. Remote Sens. 2008, 29, 617–663. [Google Scholar] [CrossRef]
- Quinlan, J.R. Induction of Decision Trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef] [Green Version]
- Cortes, C.A.V.V. Support Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Breiman, L. Bagging Predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Freund, Y.; Schapire, R.E. A Decision-Theoretic Generalization of On-Line Learning and an Application to Boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Bühlmann, P. Bagging, Boosting and Ensemble Methods. In Handbook of Computational Statistics, Gentle, J., Härdle, W., Mori, Y.; Springer: Berlin, Germany, 2012. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Manzo, C.; Valentini, E.; Taramelli, A.; Filipponi, F.; Disperati, L. Spectral characterization of coastal sediments using Field Spectral Libraries, Airborne Hyperspectral Images and Topographic LiDAR Data (FHyL). Int. J. Appl. Earth Obs. 2015, 36, 54–68. [Google Scholar] [CrossRef]
- Nijland, W.; Reshitnyk, L.Y.; Starzomski, B.M.; Reynolds, J.D.; Darimont, C.T.; Nelson, T.A. Deriving Rich Coastal Morphology and Shore Zone Classification from LIDAR Terrain Models. J. Coastal Res. 2017, 33, 949–958. [Google Scholar] [CrossRef]
- Xie, H.; Sun, Y.; Liu, X.; Xu, Q.; Guo, Y.; Liu, S.; Xu, X.; Liu, S.; Tong, X. Shore Zone Classification from ICESat-2 Data over Saint Lawrence Island. Mar. Geod. 2021, 454–466. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. UAV Remote Sensing for Urban Vegetation Mapping Using Random Forest and Texture Analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef] [Green Version]
- Harper, J.R.; Morris, M.C. Alaska ShoreZone Coastal Habitat Mapping Protocol. Prepared for Bureau of Ocean Energy Management (BOEM), Anchorage, AK. Prepared by Nuka Research and Planning Group LLC, Soldovia, AK. 2014; 164p. Available online: http://alaskafisheries.noaa.gov/shorezone/chmprotocol0114.pdf (accessed on 12 October 2021).
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Neumann, T.; Brenner, A.; Hancock, D.; Robbins, J.; Saba, J.; Harbeck, K.; Gibbons, A. Ice, Cloud, and Land Elevation Satellite--2 (ICESat-2) Project: Algorithm Theoretical Basis Document (ATBD) for Global Geolocated Photons (ATL03); National Aeronautics and Space Administration, Goddard Space Flight Center: Greenbelt, MD, USA, 2019.
- Randazzo, G.; Cascio, M.; Fontana, M.; Gregorio, F.; Lanza, S.; Muzirafuti, A. Mapping of Sicilian Pocket Beaches Land Use/Land Cover with Sentinel-2 Imagery: A Case Study of Messina Province. Land 2021, 10, 678. [Google Scholar] [CrossRef]
- Arjasakusuma, S.; Kusuma, S.S.; Saringatin, S.; Wicaksono, P.; Mutaqin, B.W.; Rafif, R. Shoreline Dynamics in East Java Province, Indonesia, from 2000 to 2019 Using Multi-Sensor Remote Sensing Data. Land 2021, 10, 100. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Rouse, J.W.; Haas, R.U.D.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS; NASA Special Publication: Washington, DC, USA, 1974; Volume 351, p. 309.
- Gao, B. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Han-Qiu, X.U. A study on information extraction of water body with the modified normalized difference water index (MNDWI). J. Remote Sens. 2005, 5, 589–595. [Google Scholar]
- Thompson, C.N.; Guo, W.; Sharma, B.; Ritchie, G.L. Using normalized difference red edge index to assess maturity in cotton. Crop Sci. 2019, 59, 2167–2177. [Google Scholar] [CrossRef]
- Major, D.J.; Baret, F.E.D.E.; Guyot, G. A ratio vegetation index adjusted for soil brightness. Int. J. Remote Sens. 1990, 11, 727–740. [Google Scholar] [CrossRef]
- Abshire, J.B.; Sun, X.; Riris, H.; Sirota, J.M.; McGarry, J.F.; Palm, S.; Yi, D.; Liiva, P. Geoscience laser altimeter system (GLAS) on the ICESat mission: On-orbit measurement performance. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef] [Green Version]
- Mason, D.C.; Gurney, C.; Kennett, M. Beach topography mapping—a comparsion of techniques. J. Coast. Conserv. 2000, 6, 113–124. [Google Scholar] [CrossRef]
- Zi--chen, G.; Tao, W.; Shu--lin, L.; Wen--ping, K.; Xiang, C.; Kun, F.; Ying, Z. Comparison of the backpropagation network and the random forest algorithm based on sampling distribution effects consideration for estimating nonphotosynthetic vegetation cover. Int. J. Appl. Earth Obs. 2021, 104, 102573. [Google Scholar] [CrossRef]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS Bathymetry and Analysis of ATLAS’s Bathymetric Mapping Performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Qi, J.; Li, J.; Tang, Q.; Xu, W.; Zhou, X.; Meng, W. Accurate Refraction Correction—Assisted Bathymetric Inversion Using ICESat-2 and Multispectral Data. Remote Sens. 2021, 13, 4355. [Google Scholar] [CrossRef]
- Zhao, Y.; An, R.; Xiong, N.; Ou, D.; Jiang, C. Spatio-Temporal Land-Use/Land-Cover Change Dynamics in Coastal Plains in Hangzhou Bay Area, China from 2009 to 2020 Using Google Earth Engine. Land 2021, 10, 1149. [Google Scholar] [CrossRef]
- Mohamed, M.A. Classification of Landforms for Digital Soil Mapping in Urban Areas Using LiDAR Data Derived Terrain Attributes: A Case Study from Berlin, Germany. Land 2020, 9, 319. [Google Scholar] [CrossRef]
- Zhang, J.; Tian, J.; Li, X.; Wang, L.; Chen, B.; Gong, H.; Ni, R.; Zhou, B.; Yang, C. Leaf area index retrieval with ICESat-2 photon counting LiDAR. Int. J. Appl. Earth Obs. 2021, 103, 102488. [Google Scholar] [CrossRef]
- Cooley, S.W.; Ryan, J.C.; Smith, L.C. Human alteration of global surface water storage variability. Nature 2021, 591, 78–81. [Google Scholar] [CrossRef]






| Variable Name | Characteristic Description | References |
|---|---|---|
| Band | B2 B3 B4 B5 B6 B8a B11 B12 | |
| Difference Vegetation Index (DVI) | B8a − B4 | [30] |
| Normalized Difference Vegetation Index (NDVI) | (B8a − B4)/(B8a + B4) | [31] |
| Normalized Difference Water Index (NDWI) | (B3 − B8a)/(B3 + B8a) | [32] |
| Modified Normalized Difference Water Index (MNDWI) | (B3 − B11)/(B3 + B11) | [33] |
| Normalized Difference Red Edge Index (NDRE) | (B6 − B5)/(B6 + B5) | [34] |
| Ratio Vegetation Index (RVI) | B8a − B4 | [35] |
| Variable Name | Characteristic Description | Variable Name | Characteristic Description |
|---|---|---|---|
| STD | Kurtosis | ||
| Rstd | Skewness | ||
| MAD | Slope | ||
| QD | SNR | ||
| RAD | Numbers | ||
| MAE | Ratio | ||
| Median |
| Experimental Protocols | Features Combination | Prediction Targets |
|---|---|---|
| 1 | Sentinel-2 features | Shore type |
| 2 | ICESat-2 features | Shore type |
| 3 | ICESat-2 and Sentinel-2 features | Shore type |
| 4 | Optimal features | Shore type |
| Experimental Protocols | Accuracy | Kappa |
|---|---|---|
| 1 | 68.03% | 0.62 |
| 2 | 42.63% | 0.31 |
| 3 | 77.80% | 0.75 |
| 4 | 83.61% | 0.81 |
| Reference | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Prediction | 2 | 3 | 7 | 8 | 9 | 12 | 14 | 22 | 24 | 25 | 26 | 28 | 30 | Total |
| Rock Platform, wide 2 | 1 | 1 | ||||||||||||
| Rock Cliff 3 | 1 | 1 | ||||||||||||
| Platform with gravel beach, wide 7 | 1 | 1 | ||||||||||||
| Cliff with gravel beach 8 | 13 | 1 | 14 | |||||||||||
| Ramp with gravel beach 9 | 1 | 7 | 1 | 1 | 1 | 2 | 13 | |||||||
| Platform with gravel/sand beach, wide 12 | 2 | 1 | 3 | |||||||||||
| Ramp with gravel/sand beach 14 | 7 | 7 | ||||||||||||
| Gravel beach, narrow 22 | 2 | 22 | 24 | |||||||||||
| Sand/Gravel flat or fan 24 | 1 | 1 | 8 | 1 | 11 | |||||||||
| Sand/Gravel beach, narrow 25 | 11 | 11 | ||||||||||||
| Sand/Gravel flat or fan 26 | 3 | 3 | ||||||||||||
| Sand flat 28 | 1 | 1 | 1 | 1 | 27 | 31 | ||||||||
| Sand beach 30 | 1 | 1 | 2 | |||||||||||
| Total | 1 | 1 | 4 | 16 | 8 | 4 | 9 | 23 | 9 | 14 | 3 | 30 | 0 | 122 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Li, J.; Tang, Q.; Qi, J.; Zhou, X. Classifying the Nunivak Island Coastline Using the Random Forest Integration of the Sentinel-2 and ICESat-2 Data. Land 2022, 11, 240. https://doi.org/10.3390/land11020240
Liu C, Li J, Tang Q, Qi J, Zhou X. Classifying the Nunivak Island Coastline Using the Random Forest Integration of the Sentinel-2 and ICESat-2 Data. Land. 2022; 11(2):240. https://doi.org/10.3390/land11020240
Chicago/Turabian StyleLiu, Changda, Jie Li, Qiuhua Tang, Jiawei Qi, and Xinghua Zhou. 2022. "Classifying the Nunivak Island Coastline Using the Random Forest Integration of the Sentinel-2 and ICESat-2 Data" Land 11, no. 2: 240. https://doi.org/10.3390/land11020240
APA StyleLiu, C., Li, J., Tang, Q., Qi, J., & Zhou, X. (2022). Classifying the Nunivak Island Coastline Using the Random Forest Integration of the Sentinel-2 and ICESat-2 Data. Land, 11(2), 240. https://doi.org/10.3390/land11020240