1. Introduction
The Maxwell equations, as we have known them since the seminal addition of Ampere’s law by Maxwell in 1865, are [
1]:
where
and
are the macroscopic electric and magnetic field variables, which in a vacuum are related to
and
by the relations
and
, where
and
are the dielectric constant and magnetic permeability and where
q and
stand for charge and current densities, respectively.
The top two equations in Equation (
1) express that the time-dependent magnetic field induces an electric field and also that the changing electric field induces a magnetic field even if there are no electric currents. Obviously, there have been plenty of brilliant theoretical, experimental and technological developments based on the use of these equations. Nevertheless, from time to time, some new developments (for a recent examples, see, for instance, [
2,
3]) have stimulated reconsideration of claims that previously were treated as text-book material in Maxwell theory.
In this short note, the pair of simple constraint equations on the bottom line in Equation (
2) are the center of interest. These relations for the divergence of a vector field are customarily treated as elliptic equations. The main purpose of this letter is to show that by choosing basic variables in a geometrically-preferred way, the constraints in Equation (
2) can also be solved as evolutionary equations. This also happens in the more complicated case of the constraints in general relativity [
4].
Once the Maxwell Equations (
1) and (
2) are given, it is needless to explain in detail what is meant to be the ambient spacetime (tacitly, it is assumed to be the Minkowski spacetime) or the initial data surface (usually chosen to be a “
” hypersurface in Minkowski spacetime). As seen below, the entire argument, outlined in more detail in the succeeding sections, is very simple. In addition, it applies with almost no cost to a generic ambient space
, with a generic three-dimensional initial data surface
. We shall treat the generic case, i.e., solve the “divergence of a vector field type constraint”,
for a vector field
or (in index notation)
with a generic source
ℓ, on a fixed, but otherwise arbitrary initial data surface,
. As an initial data surface can always be viewed as a time slice in an ambient spacetime,
, it is also straightforward to assign a Riemannian metric
to
, the one induced by
on
. In Equation (
3) above,
stands for the unique torsion-free covariant derivative operator that is compatible with metric
.
Note that for the Maxwell system, given by Equations (
1) and (
2), the two divergences of a vector field constraint decouple, so it suffices to solve them independently. Note also that it is easy to see that all the arguments presented in the succeeding subsections generalize to an arbitrary
dimension of
. Nevertheless, for the sake of simplicity, our consideration here will be restricted to the case of three-dimensional initial data surfaces.
Since the constraints are almost exclusively referred to as elliptic equations in text-books, one may question the point of putting them into evolutionary form. We believe that the appearance of time evolution in a Riemannian space could itself be of interest in its own right. Nevertheless, it is important to emphasize that there are valuable applications of the proposed new method. For instance, it may offer solutions to problems that are hard to solve properly in the standard elliptic approach. An immediate example of this sort arises in the initialization of the time evolution of point charges governed by the coupled Maxwell–Lorentz equations. As pointed out recently in [
2], unless suitable additional conditions are applied in addition to the Maxwell constraints, the electromagnetic field develops singularities along the light cones emanating from the original positions of the point charges. It is important to be mentioned here that analogous problems arise in the context of the initialization of the time evolution of binary black hole configurations. In both cases, singularities are involved, which in the case of the Maxwell–Lorentz system are located at the point charges, whereas in the binary black hole case, at the spacetime singularities. The main task is to construct physically-adequate initial data specifications such that they are regular everywhere apart from these singularities. In the case of binary black hole configurations, this can be done by using the superposed Kerr–Schild metric, as an auxiliary ingredient in determining the freely-specifiable fields. Then, suitable “initial data” are chosen, in the distant radiation-dominated region, to the evolutionary form of the Hamiltonian and momentum constraints of general relativity. The desired initial data are completed finally by solving the corresponding initial value problem [
5]. A completely analogous procedure is proposed to be used in initializing the time evolution of a pair of interacting point charges in Maxwell theory (a detailed outline of this proposal is given in
Section 4). In this case, the “superposed” Liénard–Wiechert vector potentials are used, as an auxiliary ingredient to prescribe the freely-specifiable fields. In addition, suitable initial data have to be chosen with respect to the evolutionary forms of the constraints (see Equation (
16) below) in a distant radiation-dominated region. The desired initial data can then be completed by solving the evolutionary form of the constraints Equation (
2) as an initial value problem. It is remarkable that while in the conventional elliptic approach, some assumptions (in most cases tacit ones) are always used concerning the blow up rate (while approaching the singularities) of the constrained fields, no such fictitious “inner boundary condition” is applied anywhere in the proposed new method. It is indeed the evolutionary form of constraints itself that tells the constrained variables how they should evolve from their weak field values towards and up to the singularities.
An additional, and not the least important, potential advantage of the proposed new method is that it offers an unprecedented flexibility in solving the constraint equations. This originates from the fact that neither the choice of the underlying foliations of the three-dimensional initial data surface , nor the choice of the evolutionary flow have any limitations. This makes the proposed method applicable to a high variety of problems that might benefit from this new approach to solving the constraints.
Another advantage of this new approach to the constraints is that, regardless of the choice of foliation and flow, the geometrically-preferred set of variables constructed in carrying out the main steps of the procedure always satisfy a linear first order symmetric hyperbolic equation. Considering the robustness of the approach, it is remarkable that, starting with the “divergence of a vector field constraint”, the global existence of a unique smooth solution for the geometrically-preferred dependent variables (under suitable regularity conditions on the coefficients and source terms) is guaranteed for the linear first order symmetric hyperbolic equation (see, e.g., Subsection VIII.12.1 in [
6]).
2. Preliminaries
The construction starts by choosing a three-dimensional initial data surface
with an induced Riemannian metric
and its associated torsion-free covariant derivative operator
.
may be assumed to lie in an ambient space
whose metric could have either a Lorentzian or Euclidean signature. More importantly,
will be assumed to be a topological product:
where
could be of a two-surface with arbitrary topology. In the simplest practical case, however,
would have either a planar, cylindrical, toroidal, or spherical topology. In these cases, we may assume that there exists a smooth real function
whose
level sets give the
leaves of the foliation and that its gradient
does not vanish, apart from some isolated locations where the foliation may degenerate. (If, for instance,
has the topology
,
,
, or
and it is foliated by topological two-spheres, then there exists one, two, or in the later two cases, no points of degeneracy at all. If point charges are involved, it may be preferable to place the associated physical singularities at the location of these degeneracies. Note also that we often write partial derivatives
in shorthand by
.)
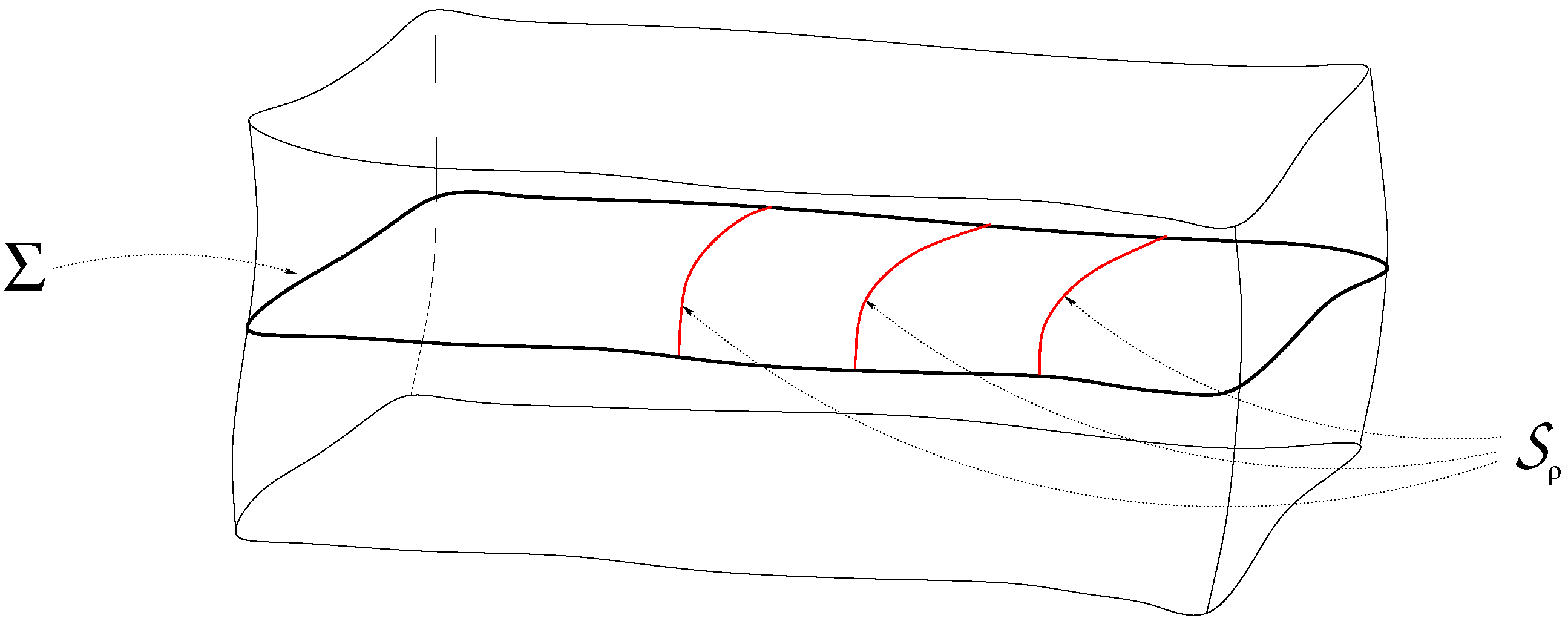
The above condition guarantees (as indicated in
Figure 1) that locally,
is smoothly foliated by a one-parameter family of
level two-surfaces
.
Given these leaves, the non-vanishing gradient
can be normalized to a unit normal
, using the Riemannian metric
. Raising the index according to
gives the unit vector field normal to
. The operator
formed from the combination of
and
and the identity operator
,
projects fields on
to the tangent space of the
leaves.
We also apply flows interrelating the fields defined on the successive
leaves. A vector field
on
is called a flow if its integral curves intersect each of the leaves precisely once and it is normalized such that
holds everywhere on
. The contraction
of
with
and its projection
of
to the leaves are referred to as the “lapse” and “shift” of the flow, and we have:
The inner geometry of the
leaves can be characterized by the metric:
induced on the
level surfaces. It is also known that a unique torsion-free covariant derivative operator
associated with the metric
acts on fields intrinsic to the
leaves, e.g., acting on the field
obtained by the projection of
according to:
It is straightforward to check that
is indeed metric compatible in the sense that
vanishes.
Note also that the exterior geometry of the
leaves can be characterized by the extrinsic curvature tensor
and the acceleration
of the unit normal, given by:
where
is the Lie derivative operator with respect to the vector field
and
is the lapse of the flow.
3. The Evolutionary Form of the Constraints
This section is to put the divergence-type constraint Equation (
3) into evolutionary form. This is achieved by applying a
decomposition where, as we see below, the main conclusion is completely insensitive to the choice of the foliation and of the flow.
Consider first an arbitrary co-vector field
on
. By making use of the projector
defined in the previous section, we obtain:
where the boldfaced variables
and
are fields intrinsic to the individual
leaves of the foliation of
. They are defined via the contractions:
By applying an analogous decomposition of
, we obtain:
which, in terms of the induced metric Equation (
7), the associated covariant derivative operator, the extrinsic curvature, and the acceleration Equation (
9), can be written as:
By contracting the last equation with the inverse
of the three-metric
on
, we obtain:
By virtue of Equation (
3) and in accord with the last equation, it is straightforward to see that the divergence of a vector field constraint can be put into the form:
Now, by choosing arbitrary coordinates
on the
leaves and by Lie dragging them along the chosen flow
, coordinates
adapted to both the foliation
and the flow
can be introduced on
. In these coordinates, Equation (
15) takes the strikingly simple form in terms of the lapse and shift of the flow,
Some remarks are now in order. First, Equation (
16) is a scalar equation whereby it is natural to view it as an equation for the scalar part
of the vector field
on
and to solve it for
. All the coefficients and source terms in Equation (
16) are determined explicitly by freely specifying the fields
and
ℓ, whereas the metric
and its decomposition in terms of the variables
, is also known throughout
. Thus, Equation (
16) can be solved for
. Note that Equation (
16) is manifestly independent of the choice made for the foliation and flow and also that Equation (
16) is always a linear hyperbolic equation for
, with
“playing the role of time”.
4. A Simple Example
Though the results in the previous section are mathematically all robust, it would be pointless to have the proposed evolutionary form of the constraints unless one could apply it in solving certain problems of physical interest. In order to get some hints of how the proposed techniques work, this section is to give an outline of a construction that could be used to get meaningful initialization of the time evolution of a pair of moving point charges in Maxwell theory.
Recall first that accelerated charges are known to emit electromagnetic radiation. An interesting particular case is when the radiation is emitted by a pair of point charges moving as dictated by their mutual electromagnetic field. To start off, choose the
time slice in a background Minkowski spacetime. This time slice itself is a three-dimensional Euclidean space
that can be endowed with the conventional Cartesian coordinates
as a three-parameter family of inertial observers has already been chosen in the ambient Minkowski background. Assume that on this time slice, the two point charges are located on the
line at
(with some
), each moving with some initial speed. Choose then a one-parameter family of confocal rotational symmetric ellipsoids:
It is straightforward to check that
gets to be foliated by the
level surfaces, which are confocal rotational ellipsoids:
with focal points
and
. Note also that each member of the two-parameter family of curves determined by the relations
, with
, parameterized by
, intersect
level surfaces precisely once. The introduced new coordinates
cover the complement of the two focal points in
. Choose this complement as our initial data surface
. These coordinates, adopted with respect to the
foliation and to the flow vector field
on
, are such that
is parallel to the
coordinate lines and is normalized such that
. The pertinent laps and shift,
and
, of this coordinate bases vector
can also be determined as described in
Section 2.
Following then a strategy analogous to the one applied in getting the binary black hole initial data in general relativity [
5], one may proceed as follows. By superposing the Liénard–Wiechert vector potentials relevant for the individual point charges, moving with certain initial speeds, determine first the corresponding auxiliary Faraday tensor
. Restrict it to the
initial data surface, and extract there the auxiliary electric
and magnetic
fields. These electric and magnetic parts of
are meant to be defined with respect to the aforementioned three-parameter family of static observers (moving in the background Minkowski spacetime with four velocity
). Split these vector fields, as described at the beginning of
Section 3, into scalar and two-dimensional vector parts; we get
and
, respectively. The two-dimensional vector parts
and
, of the auxiliary electric
and magnetic
fields, are well-defined smooth fields on
. As they encode important information about the momentary kinematical content of the considered system, e.g., the initial speeds and locations of the involved point charges, the fields
and
are used as the freely-specified part of data throughout
. Once this has been done, the radiation content of the initial data, for the physical
and
, in the far zone has to be introduced by choosing—based on measurements, expectations, and/or intuition—two smooth functions,
and
, on a level surface
(for some sufficiently large real value of
) in
. These are the initial data with respect to the pertinent forms of Equation (
16) that can be deduced—as described in
Section 2 and
Section 3—from the constraints equations in Equation (
2).
Remarkably, for arbitrarily small values of
, unique smooth solutions
and
to the (decoupled) evolutionary form of the constraint equations exist in the region bounded by the
and
level surfaces (one could integrate the equations also outwards, with respect to
; nevertheless, if one is interested in the behavior of the initial data in the near zone region, then the aforementioned domain is the relevant one). The corresponding unique smooth solutions smoothly extend onto
, even in the
limit, in spite of the fact the solutions are known to blow up at the focal points where the point charges are located initially. Using the unique smooth solution
and
, corresponding to the choices made for the initial data
and
at
, the initialization of the physical electric and magnetic fields is given as
and
, respectively. Note that they will differ from
and
as the initial data
and
, for the pertinent forms of Equation (
16), were chosen to differ from
and
. More importantly, once the electric and magnetic fields
and
are initialized in the way prescribed above, the conventional time evolution equations of the coupled Maxwell–Lorentz system (including the two ones in Equation (
1)) relevant for the pair of interacting point charges should be solved (possible by numerical means). Notably, due to the above outlined initialization, the radiation that will emerge from the consecutive accelerating motion of the pair of point charges is guaranteed to be consistent with the radiation imposed, by specifying initial data
and
, at the
level surface located in the far zone.


{kind=link}
