Pilot-Based Adaptive Channel Estimation for Underwater Spatial Modulation Technologies


 ,
,  ,
,
Abstract
:1. Introduction
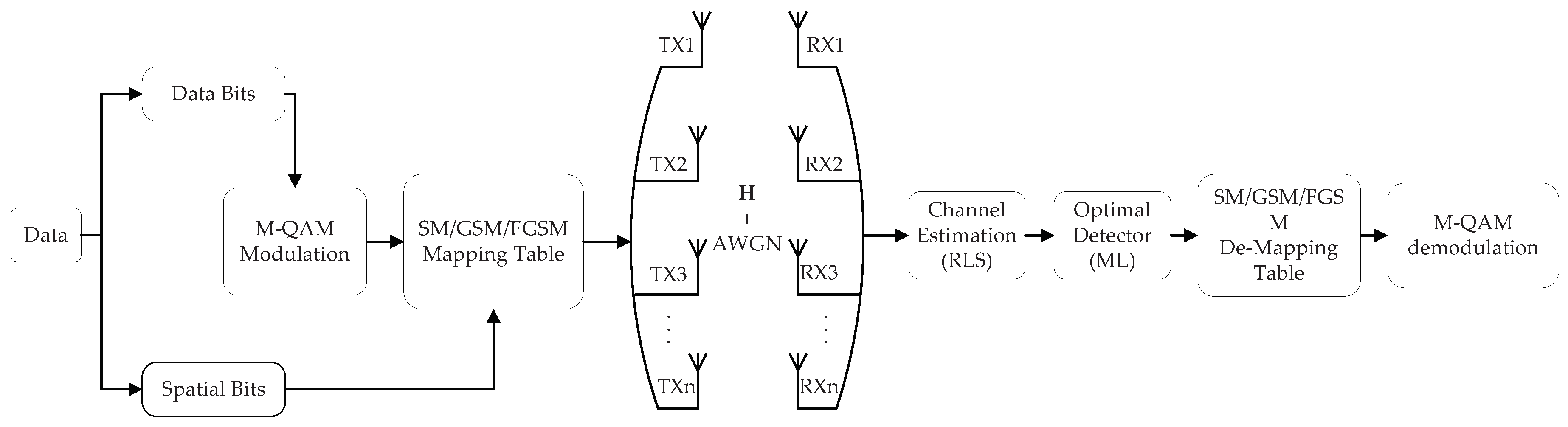
2. Spatial Modulation Technologies
2.1. Spatial Modulation
2.2. Generalized Spatial Modulation
2.3. Fully Generalized Spatial Modulation
3. Optimal Detector
4. Underwater Acoustic Channel Model
5. Recursive Least-Squares Adaptive Channel Estimation
| Algorithm 1 Recursive Least-Squares |
| Input: The individual entries of are represented by as , and the individual rows of can be denoted by as . Initialization: , the initial covariance matrix , here is a large positive number and . Repeat: 1: 2: ; 3: ; % minimizing the error 4: ; % update the filter value 5: ; % updating the value End |
6. Simulation Results and Discussion
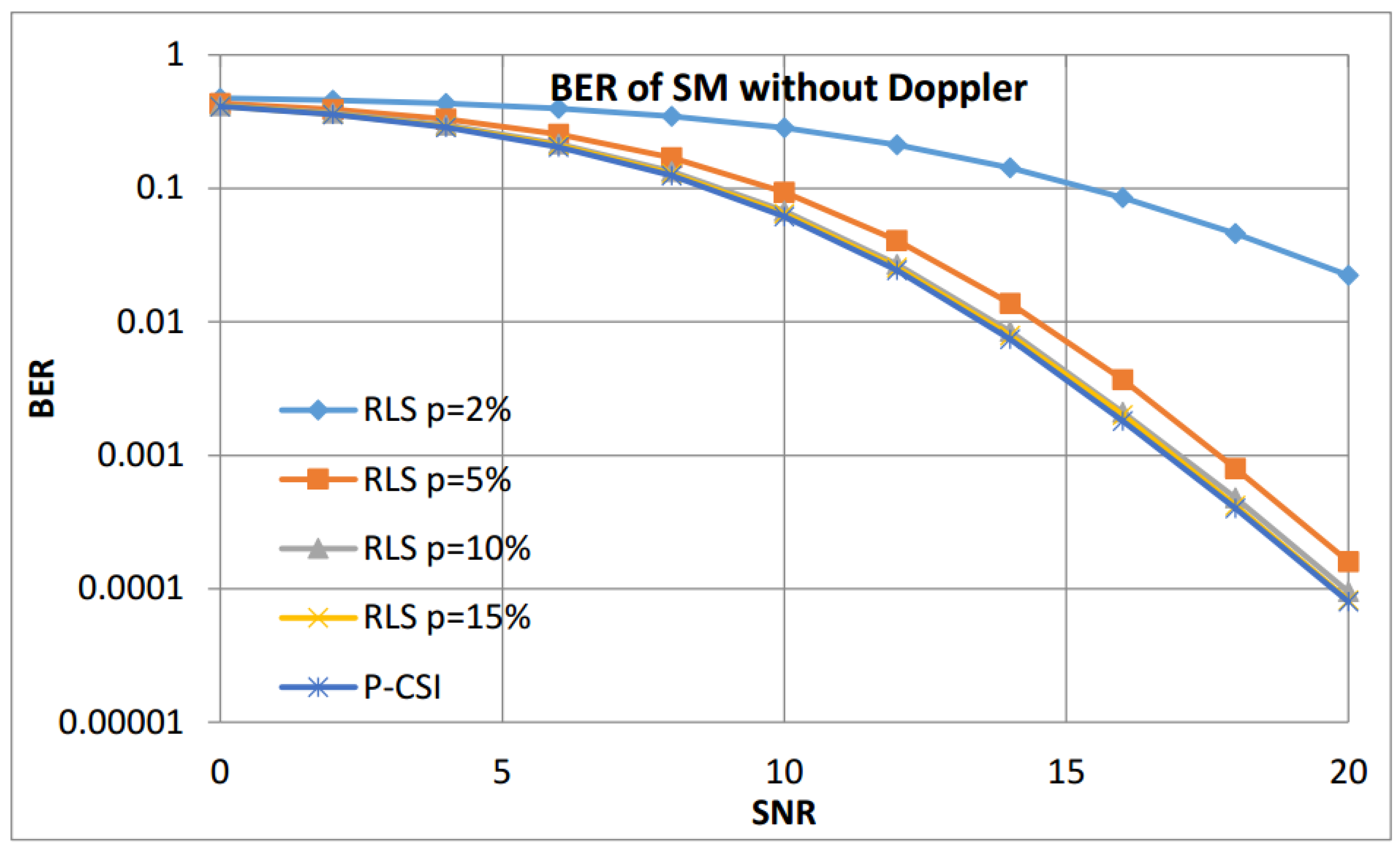
6.1. Spatial Modulation
6.2. Generalized Spatial Modulation
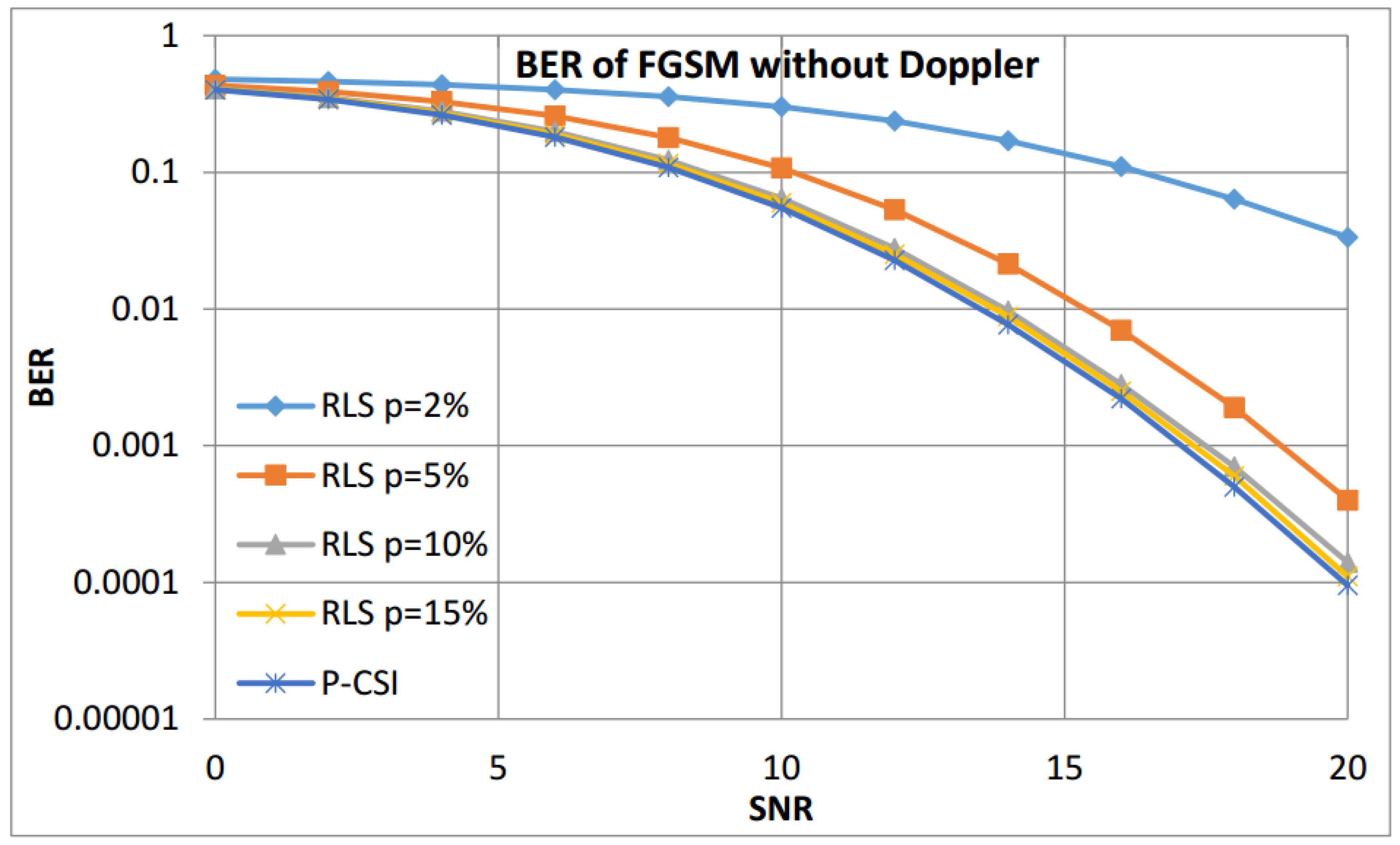
6.3. Fully Generalized Spatial Modulation
6.4. Spectral Efficiency
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ma, X.; Yang, F.; Liu, S.; Song, J. Channel estimation for wide-band underwater visible light communication: A compressive sensing perspective. Opt. Express 2018, 26, 311–321. [Google Scholar] [CrossRef]
- Junejo, N.U.R.; Esmaiel, H.; Zhou, M.; Sun, H.; Qi, J.; Wang, J. Sparse Channel Estimation of Underwater TDS-OFDM System Using Look-Ahead Backtracking Orthogonal Matching Pursuit. IEEE Access 2018, 6, 74389–74399. [Google Scholar] [CrossRef]
- Mostafa, M.; Esmaiel, H.; Mohamed, E.M. A comparative study on underwater communications for enabling C/U plane splitting based hybrid UWSNs. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Junejo, N.U.R.; Yan, J.; Adnan, S.; Chen, H.; Sun, H. Channel Estimation Using Pilot Method for Underwater Filter Bank Multicarrier System. In International Conference in Communications Signal Processing, and Systems; Springer: Singapore, 2017; pp. 1001–1009. [Google Scholar]
- Shiu, D.S.; Foschini, G.J.; Gans, M.J.; Kahn, J.M. Fading correlation and its effect on the capacity of multielement antenna systems. IEEE Trans. Commun. 2000, 48, 502–513. [Google Scholar] [CrossRef] [Green Version]
- Loyka, S.; Tsoulos, G. Estimating MIMO system performance using the correlation matrix approach. IEEE Commun. Lett. 2002, 6, 19–21. [Google Scholar] [CrossRef] [Green Version]
- Chiani, M.; Win, M.Z.; Zanella, A. On the capacity of spatially correlated MIMORayleigh-fading channels. IEEE Trans. Inf. Theory 2003, 49, 2363–2371. [Google Scholar] [CrossRef]
- Catreux, S.; Driessen, P.F.; Greenstein, L.J. Simulation results for an interference-limited multiple-input multiple-output cellular system. IEEE Commun. Lett. 2000, 4, 334–336. [Google Scholar] [CrossRef]
- Li, B.; Huang, J.; Zhou, S.; Ball, K.; Stojanovic, M.; Freitag, L.; Willett, P. MIMO-OFDM for High-Rate Underwater Acoustic Communications. IEEE J. Ocean. Eng. 2009, 34, 634–644. [Google Scholar]
- Cheng, C.C.; Sari, H.; Sezginer, S.; Su, Y.T. New Signal Design for Enhanced Spatial Modulation with Multiple Constellations. In Proceedings of the 2015 IEEE 26th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Hong Kong, China, 30 August–2 September 2015; pp. 872–876. [Google Scholar]
- Renzo, M.D.; Haas, H.; Ghrayeb, A.; Sugiura, S.; Hanzo, L. Spatial Modulation for Generalized MIMO chalenges Oppotunities and Implementation. Proc. IEEE 2014, 102, 56–103. [Google Scholar] [CrossRef]
- Mesleh, R.; Haas, H.; Ahn, C.W.; Yun, S. Spatial modulation a new low complexity spectral efficiency enhancing technique. In Proceedings of the 2006 First International Conference on Communications and Networking in China, Beijing, China, 25–27 October 2006; pp. 1–5. [Google Scholar]
- Basar, E.; Aygolu, U.; Panayirci, E.; Poor, H.V. New trellis code design for spatial modulation. IEEE Trans. Wirel. Commun. 2011, 10, 2670–2680. [Google Scholar] [CrossRef]
- Başar, E.; Aygölü, Ü.; Panayırcı, E.; Poor, H.V. Orthogonal frequency division multiplexing with index modulation. IEEE Trans. Signal Process. 2013, 61, 5536–5549. [Google Scholar] [CrossRef]
- Hussein, H.S.; Esmaiel, H.; Jiang, D. Fully generalised spatial modulation technique for underwater communication. Electron. Lett. 2018, 54, 907–909. [Google Scholar] [CrossRef]
- Hussein, H.S.; Elsayed, M.; Mohamed, U.S.; Esmaiel, H.; Mohamed, E.M. Spectral efficient spatial modulation techniques. IEEE Access 2018, 7, 1454–1469. [Google Scholar] [CrossRef]
- Cheng, C.C.; Sari, H.; Sezginer, S.; Su, Y.T. New signal designs for enhanced spatial modulation. IEEE Trans. Wirel. Commun. 2016, 15, 7766–7777. [Google Scholar] [CrossRef]
- Mesleh, R.Y.; Haas, H.; Sinanovic, S.; Ahn, C.W.; Yun, S. Spatial modulation. IEEE Trans. Veh. Technol. 2008, 57, 2228–2241. [Google Scholar] [CrossRef]
- Di Renzo, M.; Haas, H.; Grant, P. Spatial Modulation for Multiple Antenna Wireless Systems: A Survey. IEEE Commun. Mag. 2011, 49, 182–191. [Google Scholar] [CrossRef]
- Mohammadi, A.; Ghannouchi, F.M. Single RF front-end MIMO transceivers. In RF Transceiver Design for MIMO Wireless Communications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 265–288. [Google Scholar]
- Younis, A.; Serafimovski, N.; Mesleh, R.; Haas, H. Generalised spatial modulation. In Proceedings of the 2010 Conference Record of the Forty Fourth Asilomar Conference on Signals, Systems and Computers (ASILOMAR), Pacific Grove, CA, USA, 7–10 November 2010; pp. 1498–1502. [Google Scholar]
- Narasimhan, T.L.; Raviteja, P.; Chockalingam, A. Generalized spatial modulation in large-scale multiuser MIMO systems. IEEE Trans. Wirel. Commun. 2015, 14, 3764–3779. [Google Scholar] [CrossRef]
- Mesleh, R.; Ikki, S.S.; Aggoune, H.M. Quadrature spatial modulation. IEEE Trans. Veh. Technol. 2014, 64, 2738–2742. [Google Scholar] [CrossRef]
- Jeganathan, J.; Ghrayeb, A.; Szczecinski, L. Spatial modulation: optimal detection and performance analysis. IEEE Commun. Lett. 2008, 12, 545–547. [Google Scholar] [CrossRef]
- Basar, E.; Aygolu, U.; Panayirci, E.; Poor, H.V. Space-time block coded spatial modulation. IEEE Trans. Commun. 2010, 59, 823–832. [Google Scholar] [CrossRef]
- Basar, E.; Aygolu, U.; Panayirci, E.; Poor, H.V. Performance of spatial modulation in the presence of channel estimation errors. IEEE Commun. Lett. 2011, 16, 176–179. [Google Scholar] [CrossRef]
- Sugiura, S.; Hanzo, L. Effects of channel estimation on spatial modulation. IEEE Signal Process. Lett. 2012, 19, 805–808. [Google Scholar] [CrossRef]
- Cavers, J.K. An analysis of pilot symbol assisted modulation for Rayleigh fading channels (mobile radio). IEEE Trans. Veh. Technol. 1991, 40, 686–693. [Google Scholar] [CrossRef]
- Faiz, M.M.U.; Al-Ghadhban, S.; Zerguine, A. Recursive least-squares adaptive channel estimation for spatial modulation systems. In Proceedings of the 2009 IEEE 9th Malaysia International Conference on Communications (MICC), Kuala Lumpur, Malaysia, 14–17 December 2009; pp. 785–788. [Google Scholar]
- Berger, C.R.; Zhou, S.; Preisig, J.C.; Willett, P. Sparse channel estimation for multicarrier underwater acoustic communication: From subspace methods to compressed sensing. IEEE Trans. Signal Process. 2010, 58, 1708–1721. [Google Scholar] [CrossRef]
- Esmaiel, H.; Jiang, D. Spectrum and energy efficient OFDM multicarrier modulation for an underwater acoustic channel. Wirel. Pers. Commun. 2017, 96, 1577–1593. [Google Scholar] [CrossRef]
- Jeganathan, J.; Ghrayeb, A.; Szczecinski, L.; Ceron, A. Space shift keying modulation for MIMO channels. IEEE Trans. Wirel. Commun. 2009, 8, 3692–3703. [Google Scholar] [CrossRef]
- Di Renzo, M.; Haas, H. Space shift keying (SSK) modulation with partial channel state information: Optimal detector and performance analysis over fading channels. IEEE Trans. Commun. 2010, 58, 3196–3210. [Google Scholar] [CrossRef]
- Di Renzo, M.; Haas, H. Space shift keying (SSK—) MIMO over correlated Rician fading channels: Performance analysis and a new method for transmit-diversity. IEEE Trans. Commun. 2010, 59, 116–129. [Google Scholar] [CrossRef]
- Jeganathan, J.; Ghrayeb, A.; Szczecinski, L. Generalized space shift keying modulation for MIMO channels. In Proceedings of the 2008 IEEE 19th International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Cannes, France, 15–18 September 2008; pp. 1–5. [Google Scholar]
- Ntontin, K.; Di Renzo, M.; Perez-Neira, A.; Verikoukis, C. Adaptive generalized space shift keying. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 43. [Google Scholar] [CrossRef] [Green Version]
- Younis, A.; Basnayaka, D.A.; Haas, H. Performance analysis for generalised spatial modulation. In Proceedings of the 20th European Wireless Conference, Castelldefels, Barcelona, 14–16 May 2014; pp. 1–6. [Google Scholar]
- Datta, T.; Chockalingam, A. On generalized spatial modulation. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 2716–2721. [Google Scholar]
- Qasem, Z.A.; Esmaiel, H.; Sun, H.; Wang, J.; Miao, Y.; Anwar, S. Enhanced Fully Generalized Spatial Modulation for the Internet of Underwater Things. Sensors 2019, 19, 1519. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, T.C. On overhead reduction in time-reversed OFDM underwater acoustic communications. IEEE J. Ocean. Eng. 2013, 39, 788–800. [Google Scholar] [CrossRef]
- Mason, S.F.; Berger, C.R.; Zhou, S.; Willett, P. Detection, synchronization, and Doppler scale estimation with multicarrier waveforms in underwater acoustic communication. IEEE J. Sel. Areas Commun. 2008, 26, 1638–1649. [Google Scholar] [CrossRef]
- Sayed, A.H. Adaptive Filtering, 2nd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Sayed, A.H. Fundamentals of Adaptive Filtering; Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AWGN | Additive White Gaussian Noise |
| BER | Bit Error Rate |
| bpcu | Bit Per Channel Use |
| CSI | Channel State Information |
| EFGSM | Enhanced Fully Generalized Spatial Modulation |
| FGSM | Fully Generalized Spatial Modulation |
| GSM | Generalized Spatial Modulation |
| GSSK | Generalized Spatial Shift Keying |
| IAS | Inter-antenna Synchronization |
| ICI | Inter-carrier Interference |
| LMS | Least Mean Square |
| LoS | Line of Sight |
| LS | Least-Squares |
| MIMO | Multiple-Input Multiple-Output |
| ML | Maximum Likelihood |
| M-PSK | M-ary Phase Shift Keying |
| M-QAM | M-ary Quadrature Amplitude Modulation |
| MSE | Mean Square Error |
| P-CSI | Perfect Channel State Information |
| Probability Density Function | |
| PSAM | Pilot Symbol Assisted Modulation |
| RF | Radio Frequency |
| RLS | Recursive Least-Squares |
| SIMO | Single-Input Multiple-Output |
| SM | Spatial Modulation |
| SMT | Spatial Modulation Technology |
| SNR | Signal to Noise Ratio |
| SSK | Spatial Shift Keying |
| UWA | Underwater Acoustic |
| UWAC | Underwater Acoustic Communication |
| UWC | Underwater Communication |
| V-BLAST | Vertical-Bell Laboratories Layered Space-Time |
| Block Bits | Spatial Bits | Data Bits | Antenna Index |
|---|---|---|---|
| 00 b1b2 | 00 | b1b2 | 1 |
| 01 b1b2 | 01 | b1b2 | 2 |
| 10 b1b2 | 10 | b1b2 | 3 |
| 11 b1b2 | 11 | b1b2 | 4 |
| Block Bits | Spatial Bits | Data Bits | Antenna Index |
|---|---|---|---|
| 00 b1b2 | 00 | b1b2 | 1,2 |
| 01 b1b2 | 01 | b1b2 | 1,3 |
| 10 b1b2 | 10 | b1b2 | 1,4 |
| 11 b1b2 | 11 | b1b2 | 2,3 |
| Block Bits | Spatial Bits | Data Bits | Antenna Index |
|---|---|---|---|
| 000 b1b2 | 000 | b1b2 | 1 |
| 001 b1b2 | 001 | b1b2 | 2 |
| 010 b1b2 | 010 | b1b2 | 3 |
| 011 b1b2 | 011 | b1b2 | 4 |
| 100 b1b2 | 100 | b1b2 | 1,2 |
| 101 b1b2 | 101 | b1b2 | 1,3 |
| 110 b1b2 | 110 | b1b2 | 1,4 |
| 111 b1b2 | 111 | b1b2 | 2,3 |
| Number of Pilots | Used Spectral Efficiency | MSE | BER FGSM 7 pbcu) | BER GSM (6 pbcu) | BER SM (6 pbcu) |
|---|---|---|---|---|---|
| 2% | 98% | 0.5678 | 0.3155 | 0.2003 | 0.2939 |
| 5% | 95% | 0.0953 | 0.1219 | 0.0436 | 0.1025 |
| 10% | 90% | 0.0180 | 0.0781 | 0.0235 | 0.0757 |
| 15% | 85% | 0.0091 | 0.0730 | 0.0220 | 0.0729 |
| 20% | 80% | 0.0060 | 0.0679 | 0.0195 | 0.0697 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Junejo, N.U.R.; Esmaiel, H.; Sun, H.; Qasem, Z.A.H.; Wang, J. Pilot-Based Adaptive Channel Estimation for Underwater Spatial Modulation Technologies. Symmetry 2019, 11, 711. https://doi.org/10.3390/sym11050711
Junejo NUR, Esmaiel H, Sun H, Qasem ZAH, Wang J. Pilot-Based Adaptive Channel Estimation for Underwater Spatial Modulation Technologies. Symmetry. 2019; 11(5):711. https://doi.org/10.3390/sym11050711
Chicago/Turabian StyleJunejo, Naveed Ur Rehman, Hamada Esmaiel, Haixin Sun, Zeyad A. H. Qasem, and Junfeng Wang. 2019. "Pilot-Based Adaptive Channel Estimation for Underwater Spatial Modulation Technologies" Symmetry 11, no. 5: 711. https://doi.org/10.3390/sym11050711
APA StyleJunejo, N. U. R., Esmaiel, H., Sun, H., Qasem, Z. A. H., & Wang, J. (2019). Pilot-Based Adaptive Channel Estimation for Underwater Spatial Modulation Technologies. Symmetry, 11(5), 711. https://doi.org/10.3390/sym11050711