Advanced Machine Learning for Gesture Learning and Recognition Based on Intelligent Big Data of Heterogeneous Sensors



Abstract
:1. Introduction
2. Related Works
3. Generic Gesture Learning and Recognition Framework
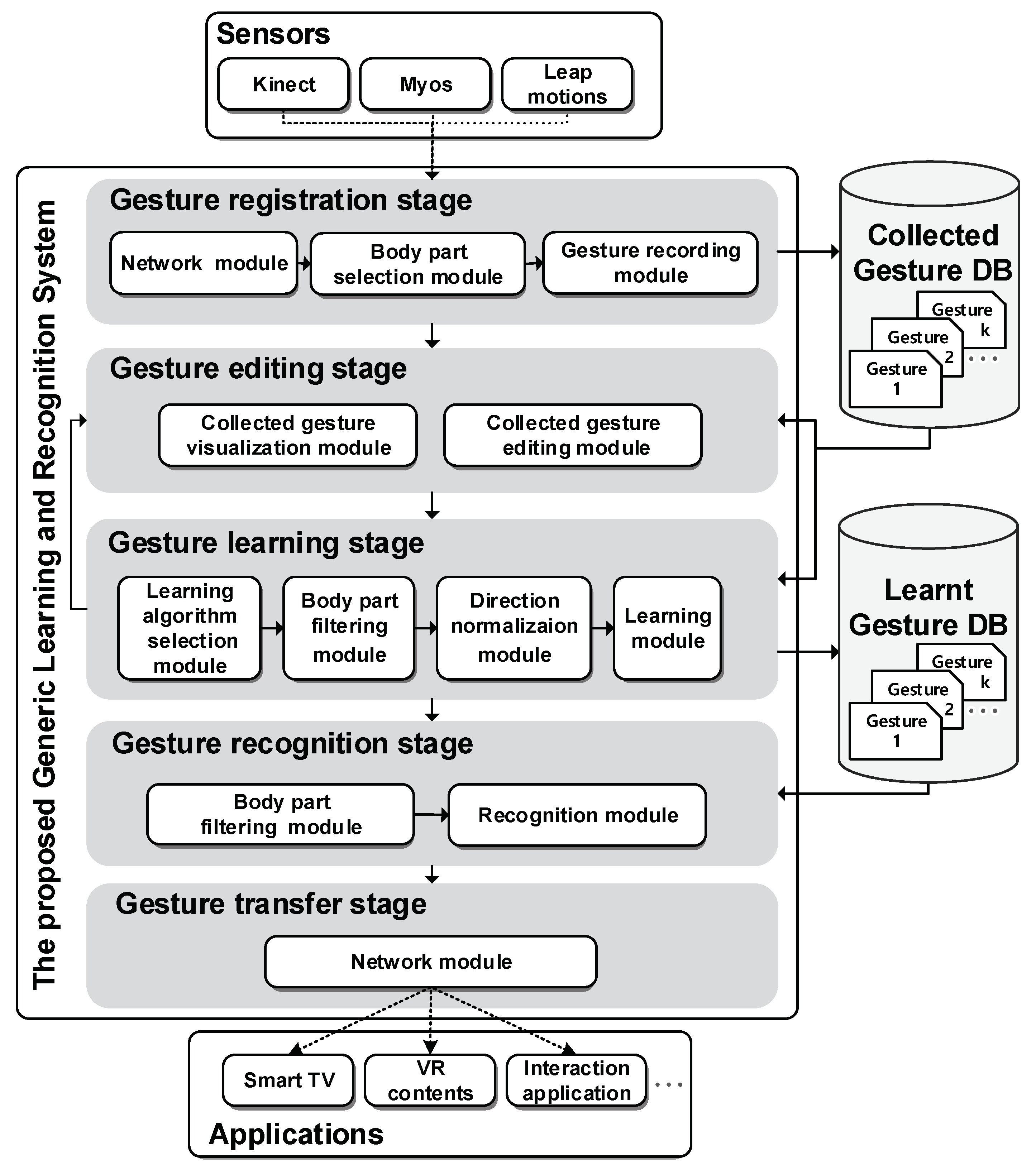
3.1. Overview of the Proposed Generic Gesture Recognition and Learning Framework
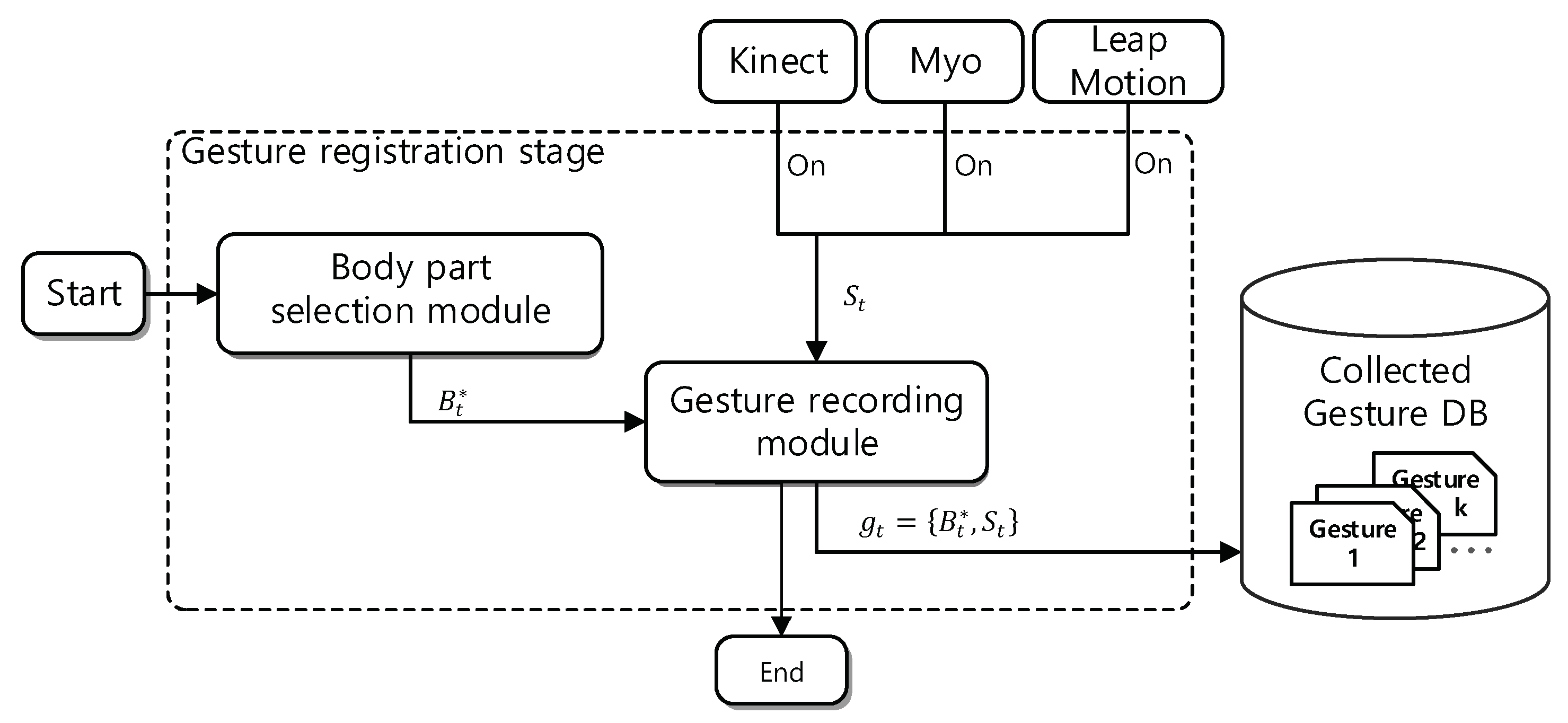
3.2. Gesture Registration Stage
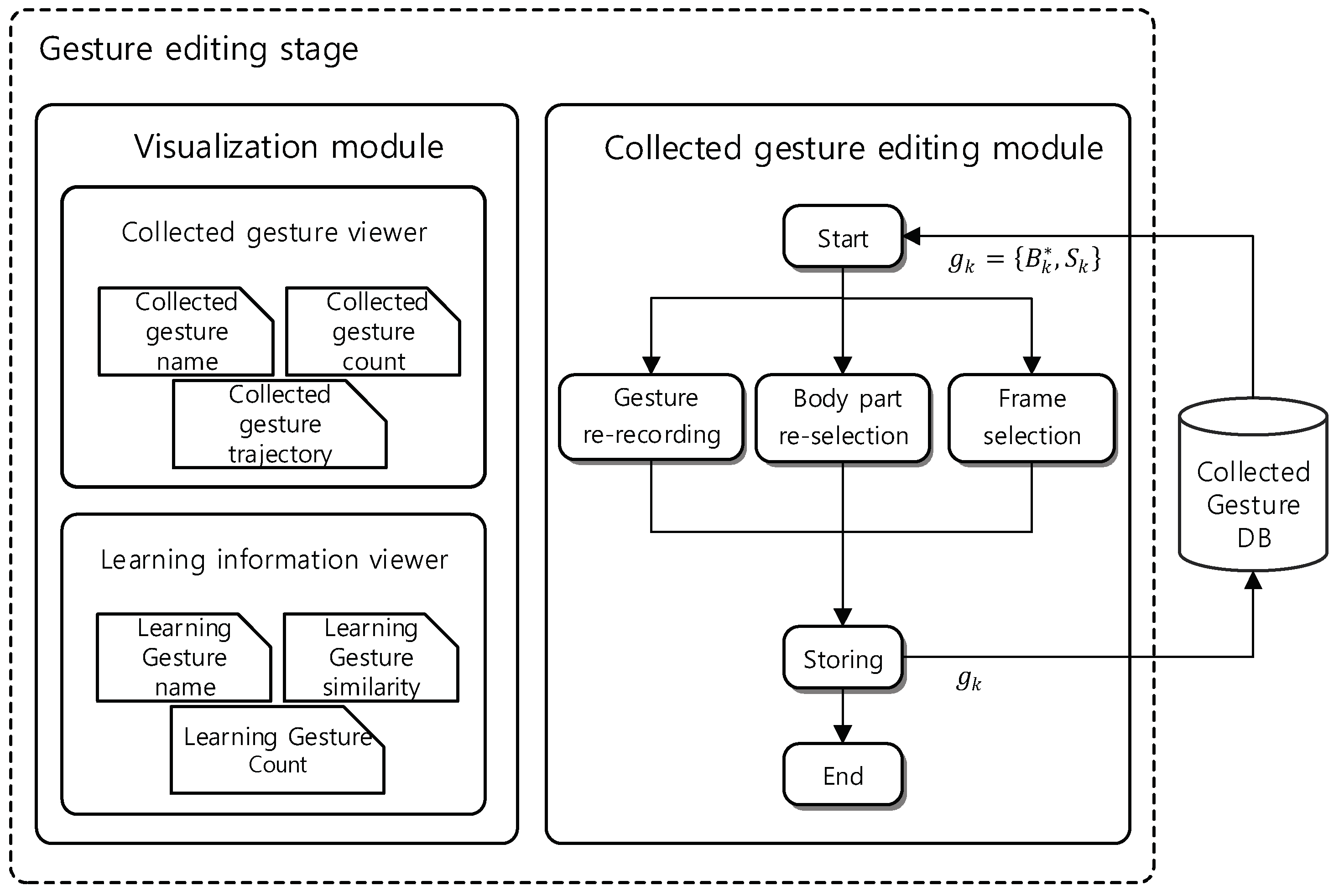
3.3. Gesture Editing Stage
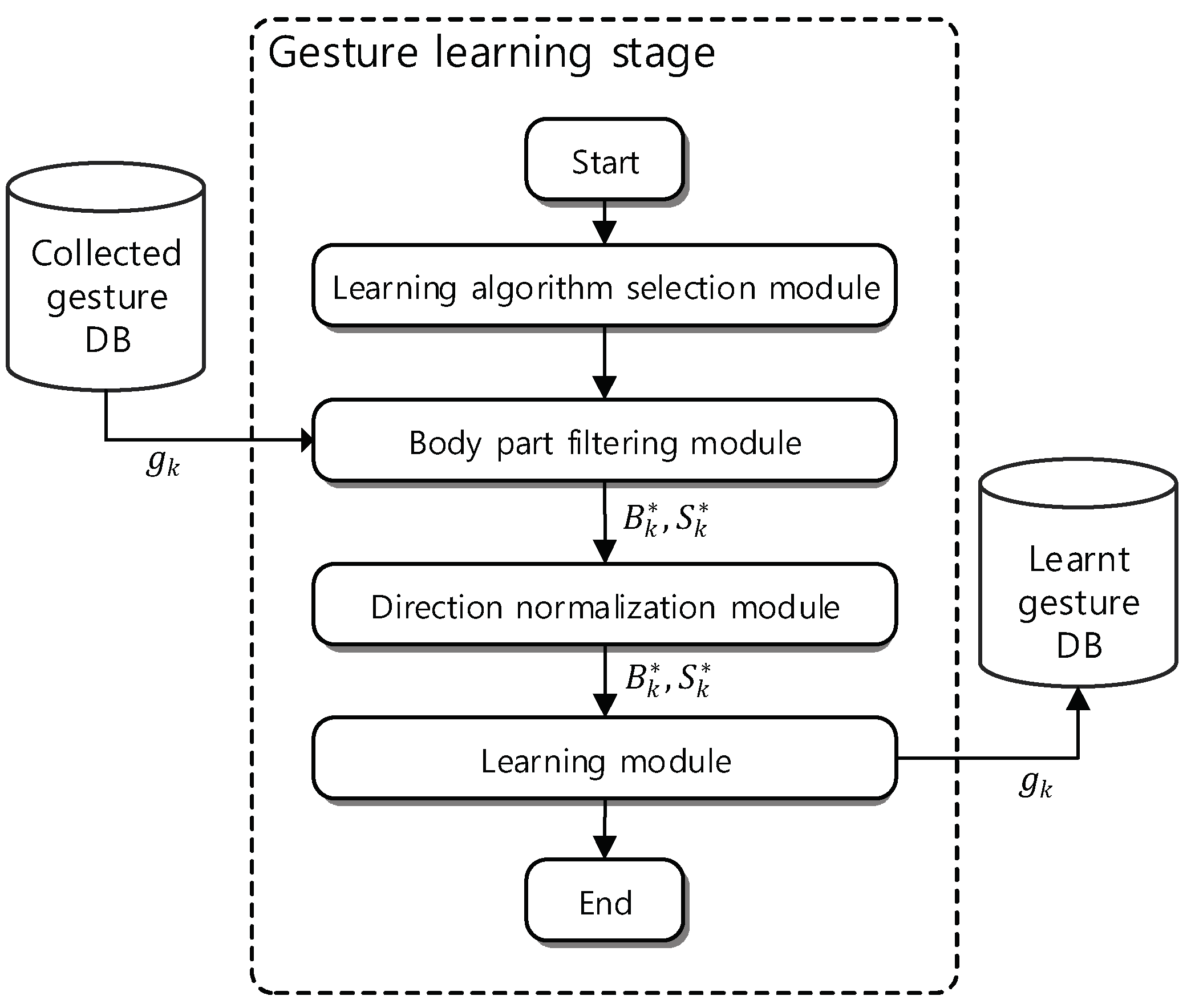
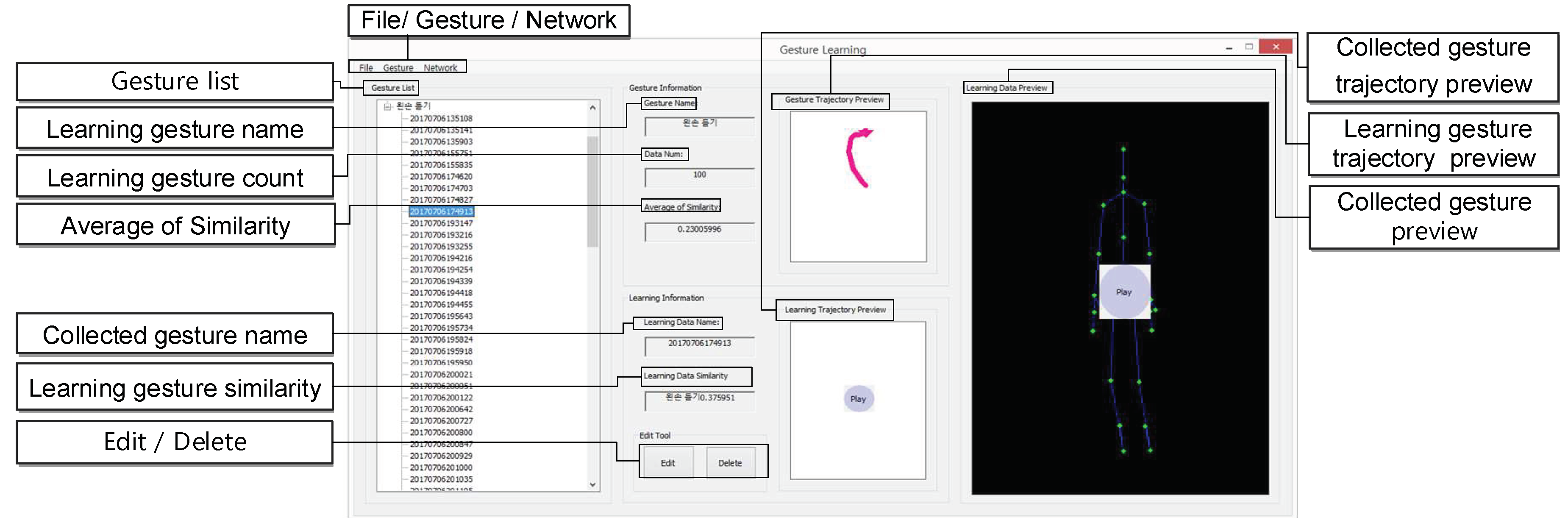
3.4. Gesture Learning Stage
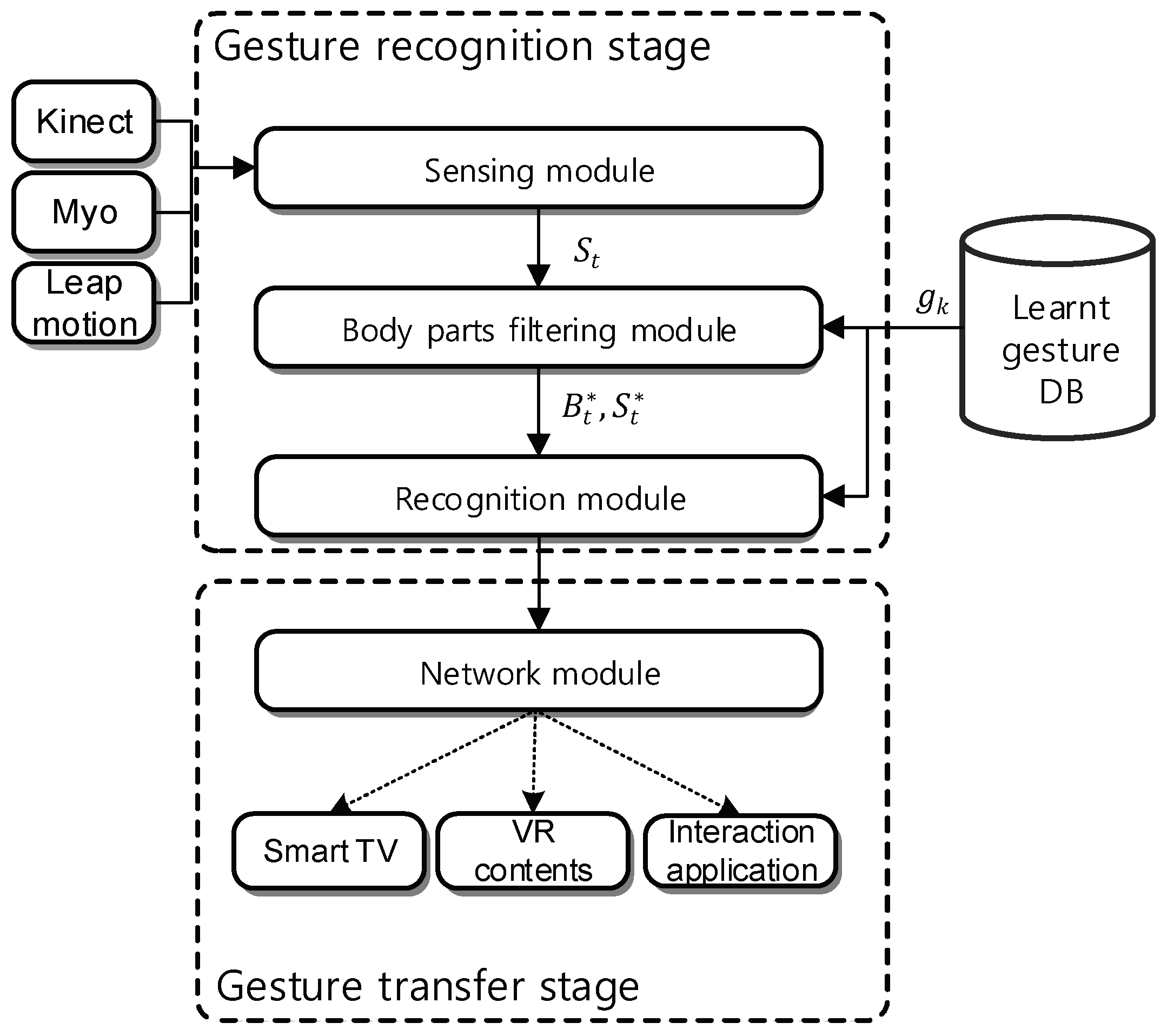
3.5. Gesture Recognition Stage and Gesture Transfer Stage
4. Generic Gesture Learning and Recognition Approach
4.1. Generic Gesture Learning and Recognition Overview
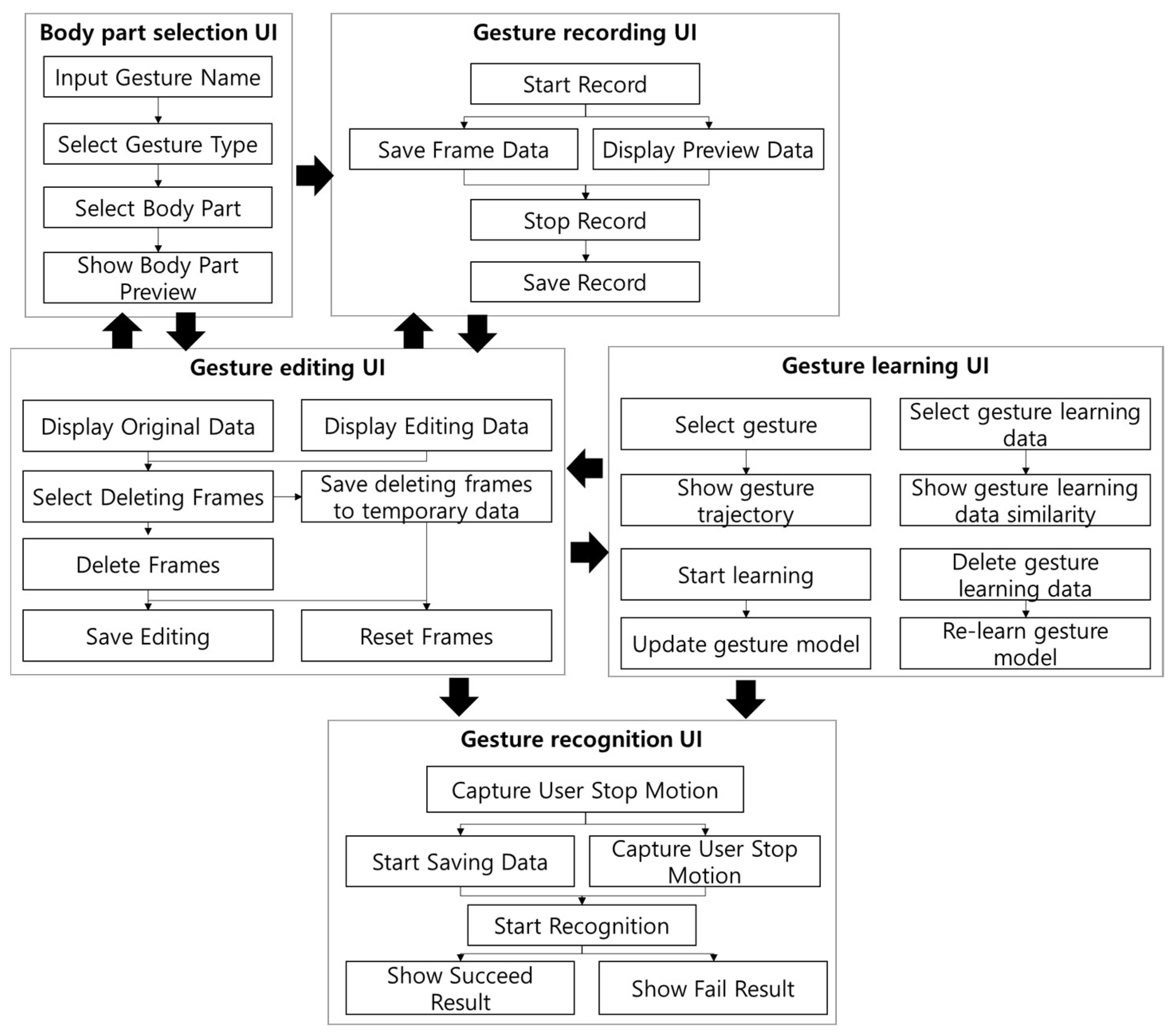
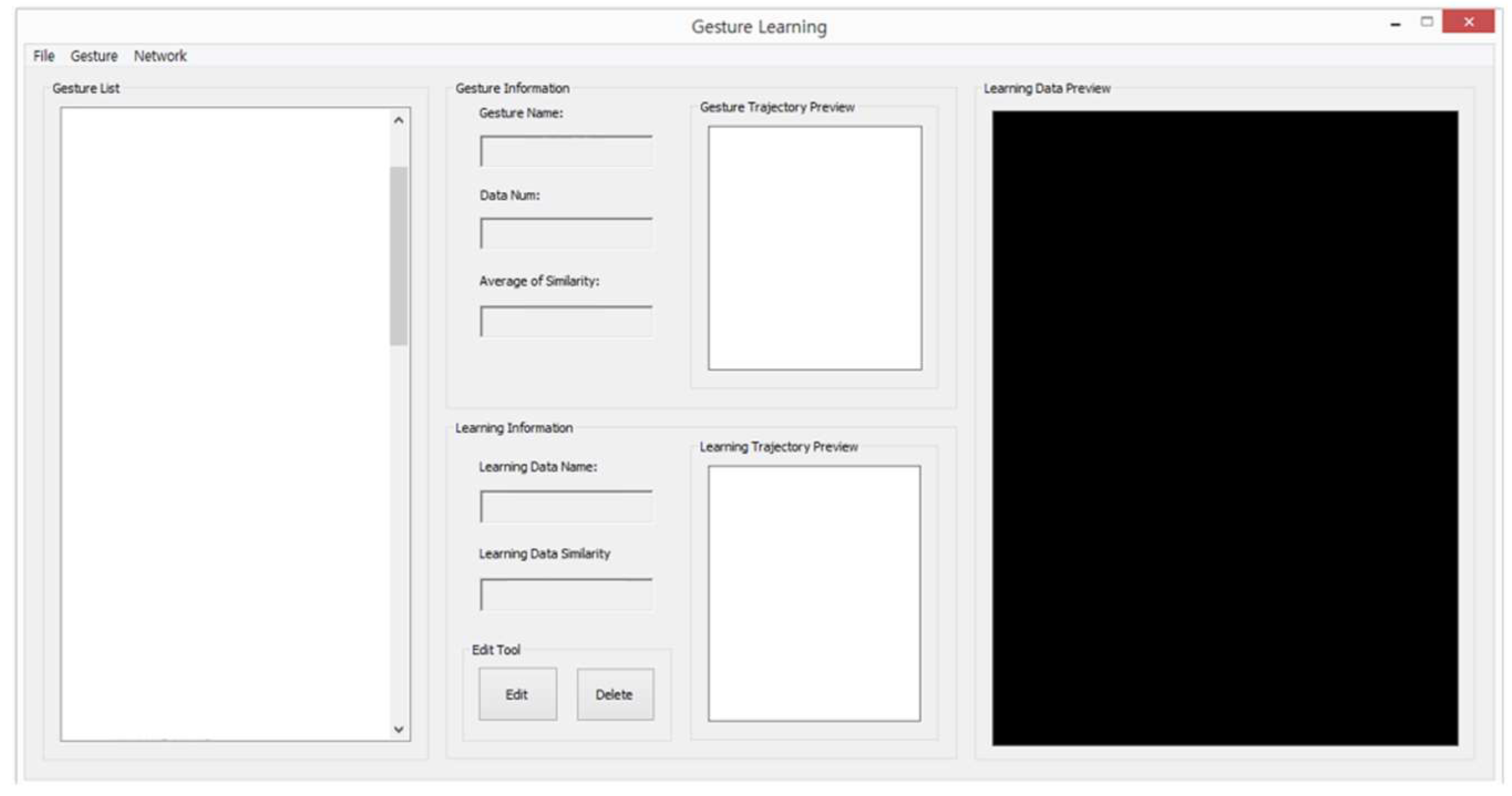
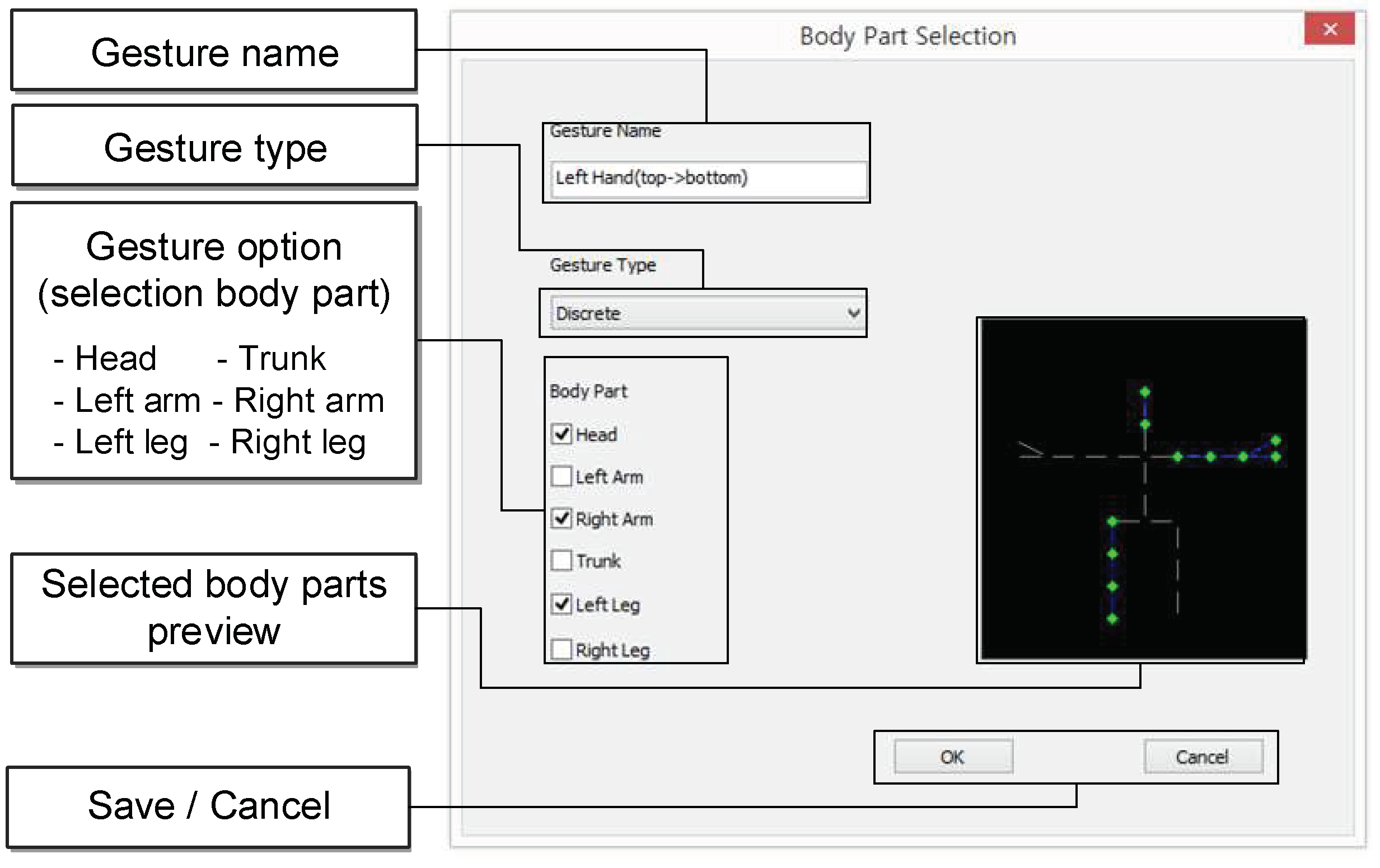
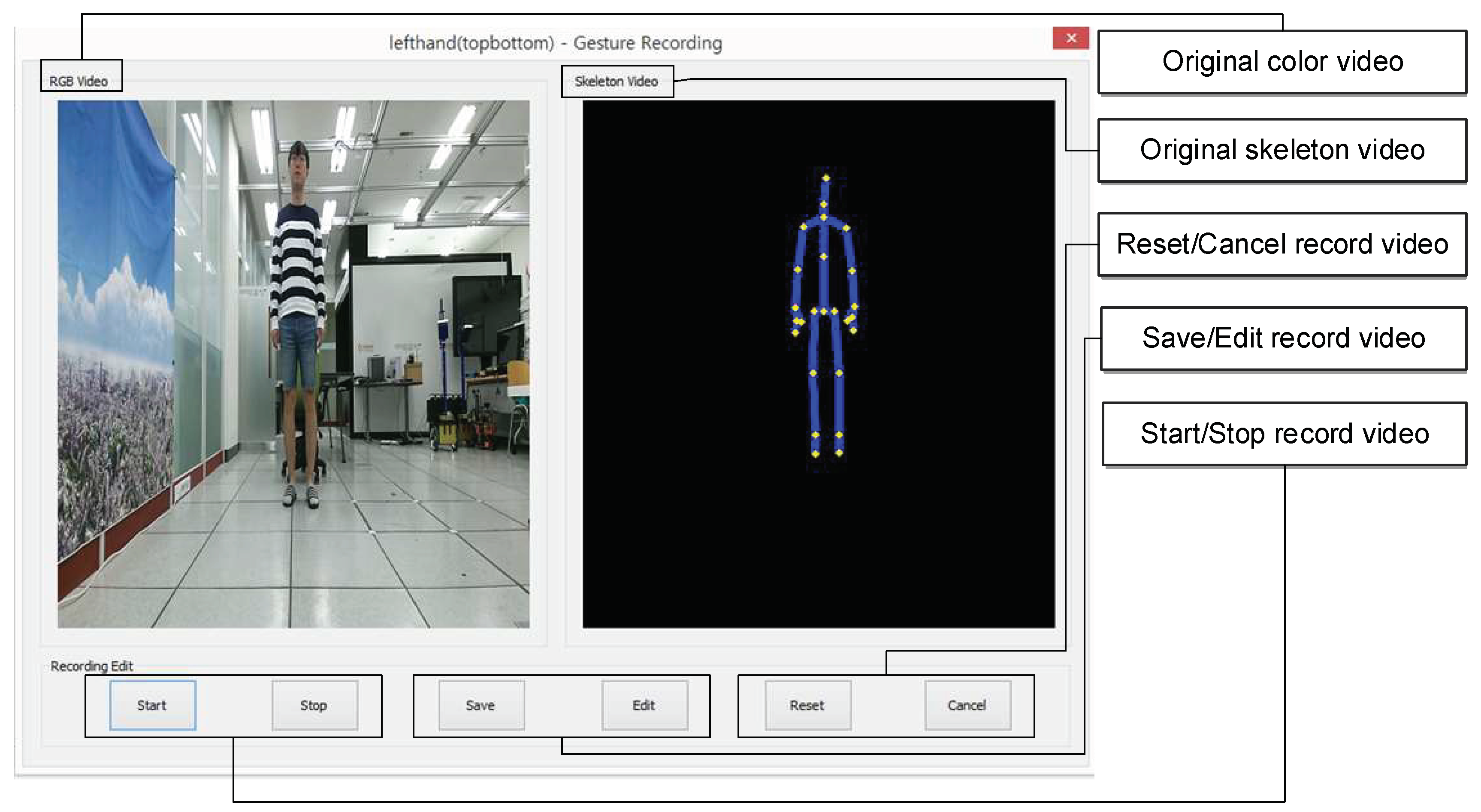
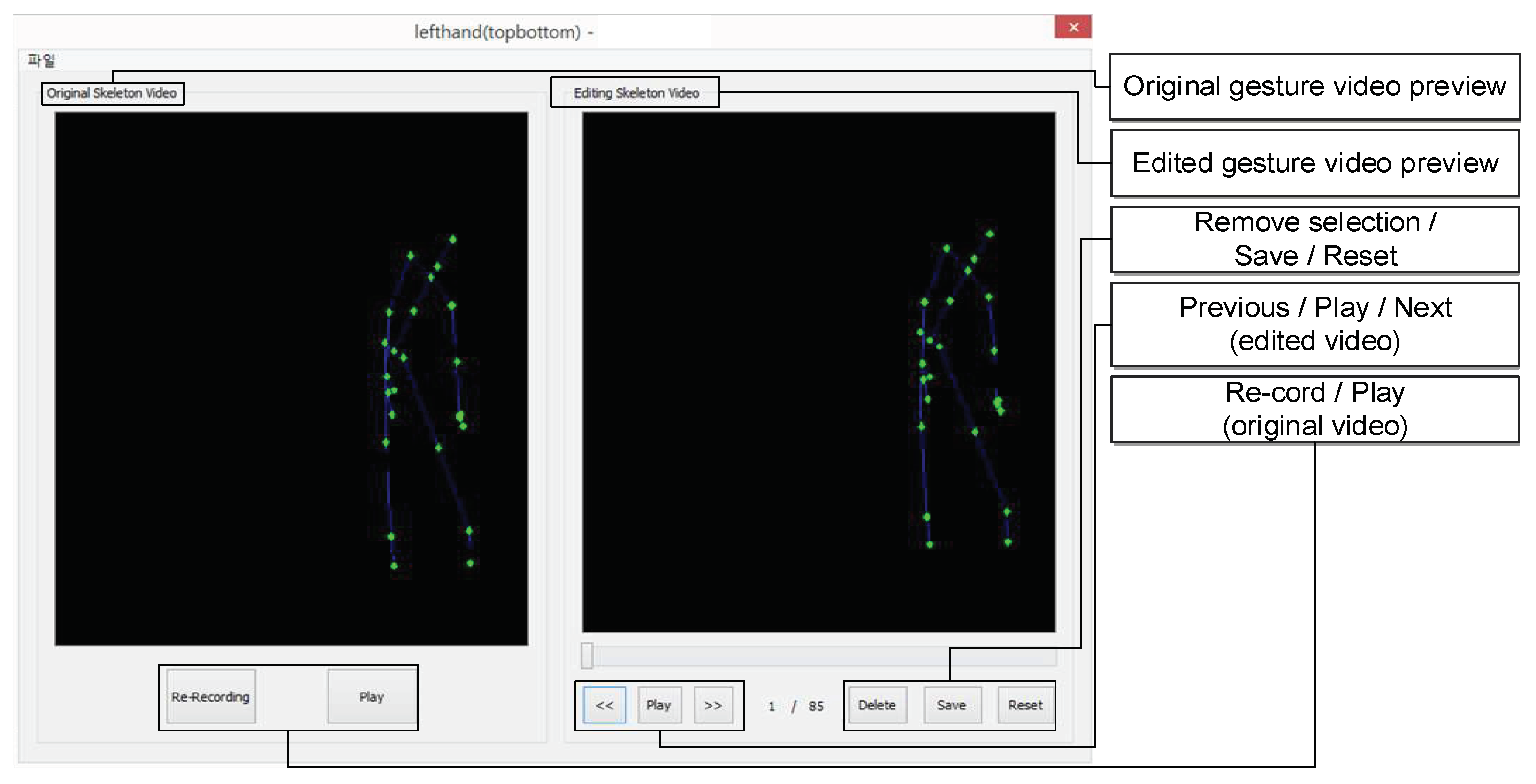
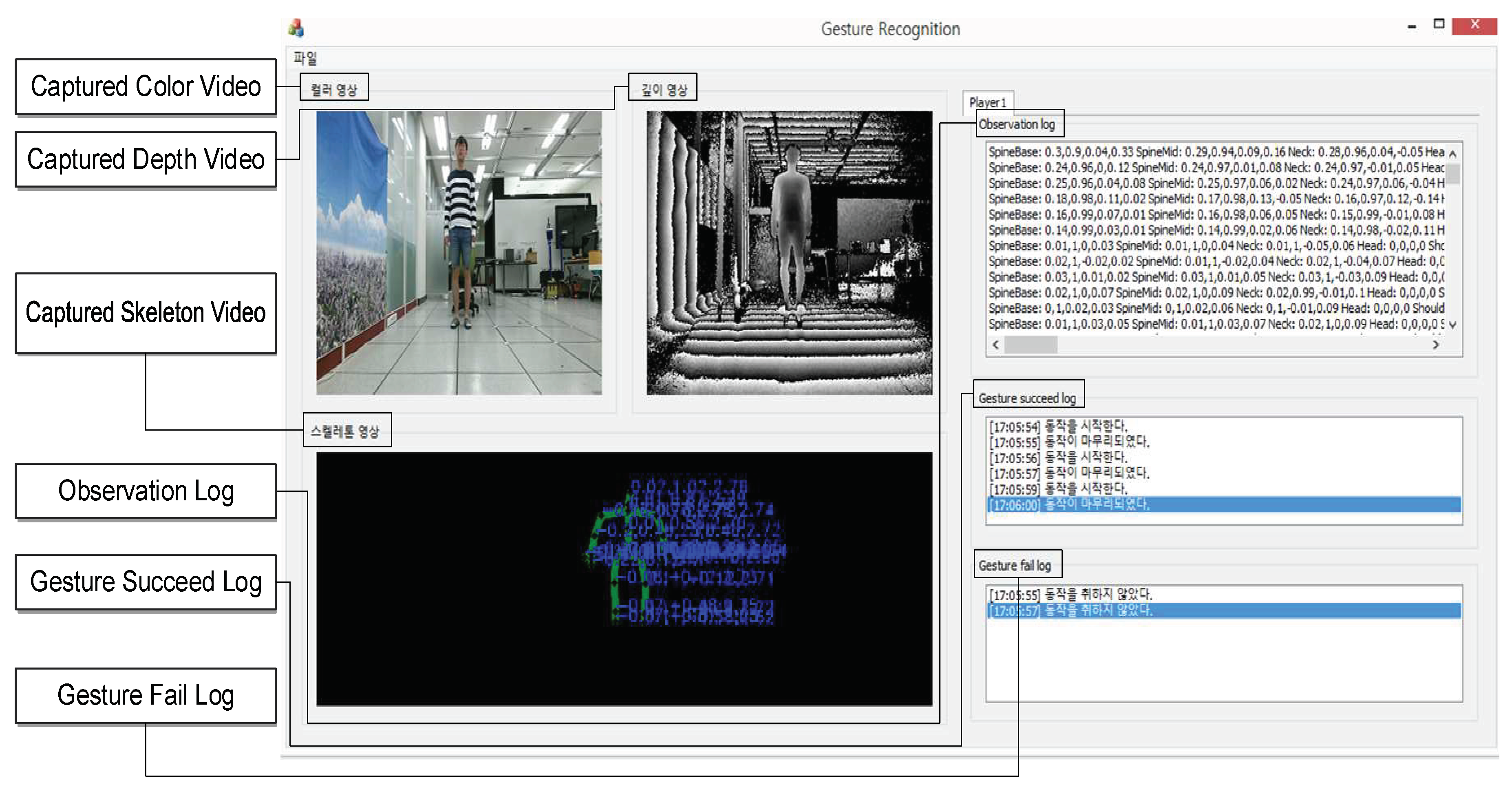
4.2. Implementation of User Interface
5. Experiments
5.1. Performance Show
5.2. Implementation of the Gesture Learning and Recognition Approach
5.3. Gesture Registration Stage Result
5.4. Gesture Editing Stage Result
5.5. Gesture Learning Stage Result
5.6. Gesture Recognition Stage Result
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Preechasuk, J.; Piamsa-nga, P. Event Detection on Motion Activities Using a Dynamic Grid. J. Inf. Process. Syst. 2015, 11, 538–555. [Google Scholar] [CrossRef]
- Song, W.; Sun, G.; Feng, N.; Fong, S.; Cho, K. Real-time infrared LED detection method for input signal positioning of interactive media. J. Converg. 2016, 7, 1–6. [Google Scholar]
- Lin, J.; Ding, Y. A temporal hand gesture recognition system based on hog and motion trajectory. Optik Int. J. Light Electron. Opt. 2013, 124, 6795–6798. [Google Scholar] [CrossRef]
- Zeineb, A.; Chaala, C.; Frikha, T.; Hadriche, A. Hand gesture recognition system. Int. J. Comput. Sci. Inf. Secur. 2016, 14, 449–453. [Google Scholar]
- Khan, R.Z.; Ibraheem, N.A. Comparative study of hand gesture recognition system. In Proceedings of the International Conference of Advanced Computer Science & Information Technology in Computer Science & Information Technology, Bangalore, India, 2–4 January 2012; Volume 2, pp. 203–213. [Google Scholar]
- Da Gama, F.; Chaves, M.; Figueiredo, S.; Baltar, A.; Meng, M.; Navab, N.; Teichrieb, V.; Fallavollita, P. MirrARbilitation: A clinically-related gesture recognition interactive tool for an AR rehabilitation system. Comput. Methods Programs Biomed. 2016, 135, 105–114. [Google Scholar] [CrossRef] [PubMed]
- Hachaj, T.; Ogiela, M.R. Rule-based approach to recognizing human body poses and gestures in real time. Multimed. Syst. 2014, 20, 81–99. [Google Scholar] [CrossRef]
- Ren, Z.; Meng, J.; Yuan, J. Depth camera based hand gesture recognition and its applications in human-computer-interaction. In Proceedings of the 2011 8th International Conference on Information, Communications and Signal Processing (ICICS), Singapore, 13–16 December 2011; pp. 1–5. [Google Scholar]
- Bautista, A.; Hernández-Vela, A.; Escalera, S.; Igual, L.; Pujol, O.; Moya, J.; Violant, V.; Anguera, M.T. A Gesture Recognition System for Detecting Behavioral Patterns of ADHD. IEEE Trans. Cybern. 2016, 46, 136–147. [Google Scholar] [CrossRef]
- Zou, Y.; Xiao, J.; Han, J.; Wu, K.; Li, Y.; Ni, M. Grfid: A device-free rfid-based gesture recognition system. IEEE Trans. Mob. Comput. 2017, 16, 381–393. [Google Scholar] [CrossRef]
- Kellogg, B.; Talla, V.; Gollakota, S. Bringing Gesture Recognition to All Devices. In Proceedings of the NSDI 14, Seattle, WA, USA, 2–4 April 2014; pp. 303–316. [Google Scholar]
- Prakash, A.; Swathi, R.; Kumar, S.; Ashwin, T.S.; Reddy, G.R.M. Kinect Based Real Time Gesture Recognition Tool for Air Marshallers and Traffic Policemen. In Proceedings of the 2016 IEEE Eighth International Conference on Technology for Education (T4E), Mumbai, India, 2–4 December 2016; pp. 34–37. [Google Scholar]
- Mi, J.; Sun, Y.; Wang, Y.; Deng, Z.; Li, L.; Zhang, J.; Xie, G. Gesture recognition based teleoperation framework of robotic fish. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 137–142. [Google Scholar]
- Xiao, Y.; Zhang, Z.; Beck, A.; Yuan, J.; Thalmann, D. Human-robot interaction by understanding upper body gestures. Presence Teleoper. Virtual Environ. 2014, 23, 133–154. [Google Scholar] [CrossRef]
- Bang, G.; Yang, J.; Oh, K.; Ko, I. Interactive Experience Room Using Infrared Sensors and User’s Poses. J. Inf. Process. Syst. 2017, 13, 876–892. [Google Scholar] [CrossRef]
- Sung, Y.; Choi, R.; Jeong, Y.-S. Arm Orientation Estimation Method with Multiple Devices for NUI/NUX. J. Inf. Process. Syst. 2018, 14, 980–988. [Google Scholar] [CrossRef]
- Lara, D.; Labrador, A. A survey on human activity recognition using wearable sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Hasan, H.; Abdul-Kareem, S. Human-computer interaction using vision-based hand gesture recognition systems: A survey. Neural Comput. Appl. 2014, 25, 251–261. [Google Scholar] [CrossRef]
- Oyuntungalag, C.; Jiro, T. Gesture Input as an Out-of-band Chanel. J. Inf. Process. Syst. 2014, 10, 92–102. [Google Scholar] [CrossRef]
- Song, W.; Liu, L.; Tian, Y.; Sun, G.; Fong, S.; Cho, K. A 3D localisation method in indoor environments for virtual reality applications. Hum. Centric Comput. Inf. Sci. 2017, 7, 1–11. [Google Scholar] [CrossRef]
- Zhu, J.; San-Segundo, R.; Pardo, J.M. Feature extraction for robust physical activity recognition. Hum. Centric Comput. Inf. Sci. 2017, 7, 1–16. [Google Scholar] [CrossRef]
- Gao, H.; Xia, S.; Zhang, Y.; Yao, R.; Zhao, J.; Niu, Q.; Jiang, H. Real-Time Visual Tracking with Compact Shape and Color Feature. Comput. Mater. Contin. 2018, 55, 509–521. [Google Scholar] [CrossRef]
- Ibañez, R.; Soria, Á.; Teyseyre, A.; Campo, M. Easy gesture recognition for Kinect. Adv. Eng. Softw. 2014, 76, 171–180. [Google Scholar] [CrossRef]
- Signer, B.; Kurmann, U.; Norrie, M. iGesture: A general gesture recognition framework. In Proceedings of the Ninth International Conference on Document Analysis and Recognition (ICDAR 2007), Parana, Brazil, 23–26 September 2007; pp. 954–958. [Google Scholar]
- Zhang, X.; Chen, X.; Li, Y.; Lantz, V.; Wang, K.; Yang, J. A framework for hand gesture recognition based on accelerometer and EMG sensors. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 1064–1076. [Google Scholar] [CrossRef]
- Truong, A.; Zaharia, T. Laban movement analysis and hidden Markov models for dynamic 3D gesture recognition. EURASIP J. Image Video Process. 2017, 2017, 52. [Google Scholar] [CrossRef] [Green Version]
- Ma, M.; Park, D.; Kim, S.; An, S. Online Recognition of Handwritten Korean and English Characters. J. Inf. Process. Syst. 2012, 8, 653–668. [Google Scholar] [CrossRef] [Green Version]
- Borghi, G.; Vezzani, R.; Cucchiara, R. Fast Gesture Recognition with Multiple Stream Discrete HMMs on 3D Skeletons. In Proceedings of the 2016 23rd International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; pp. 997–1002. [Google Scholar]
- Suma, E.A.; Lange, B.; Rizzo, A.S.; Krum, D.M.; Bolas, M. Faast: The flexible action and articulated skeleton toolkit. In Proceedings of the 2011 IEEE Virtual Reality Conference, Singapore, 19–23 March 2011; pp. 247–248. [Google Scholar]
- Gillian, N.; Paradiso J, A. The gesture recognition toolkit. J. Mach. Learn. Res. 2014, 15, 3483–3487. [Google Scholar]
- Gris, I.; Camacho, A.; Novick, D. Full-Body Gesture Recognition for Embodied Conversational Agents: The UTEP AGENT Gesture Tool. In Proceedings of the Gesture and Speech in Interatcion (GESPIN 4), Nantes, France, 2–4 September 2015; pp. 131–136. [Google Scholar]
- Pieter-Jan, M.; Denis, A.; Marc, L. Dance-the-Music: And educational platform for the modeling, recognition and audiovisual monitoring of dance steps using spatiotemporal motion templates. EURASIP J. Adv. Signal. Process. 2012, 2012, 35. [Google Scholar] [CrossRef]
- Yavşan, E.; Uçar, A. Gesture imitation and recognition using Kinect sensor and extreme learning machines. Measurement 2016, 94, 852–861. [Google Scholar] [CrossRef]
- Du, Y.; Wang, W.; Wang, L. Hierarchical Recurrent Neural Network for Skeleton Based Action Recognition. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Choi, H.; Kim, T. Modified Dynamic Time Warping Based on Direction Similarity for Fast Gesture Recognition. Math. Probl. Eng. 2018, 2018. [Google Scholar] [CrossRef]
- Alba, R.; Dawid, W.; Mariusz, O. An Approach to Gesture Recognition with Skeletal Data Using Dynamic Time Warping and Nearest Neighbour Classifier. Int. J. Intell. Syst. Appl. 2016, 6, 1–8. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
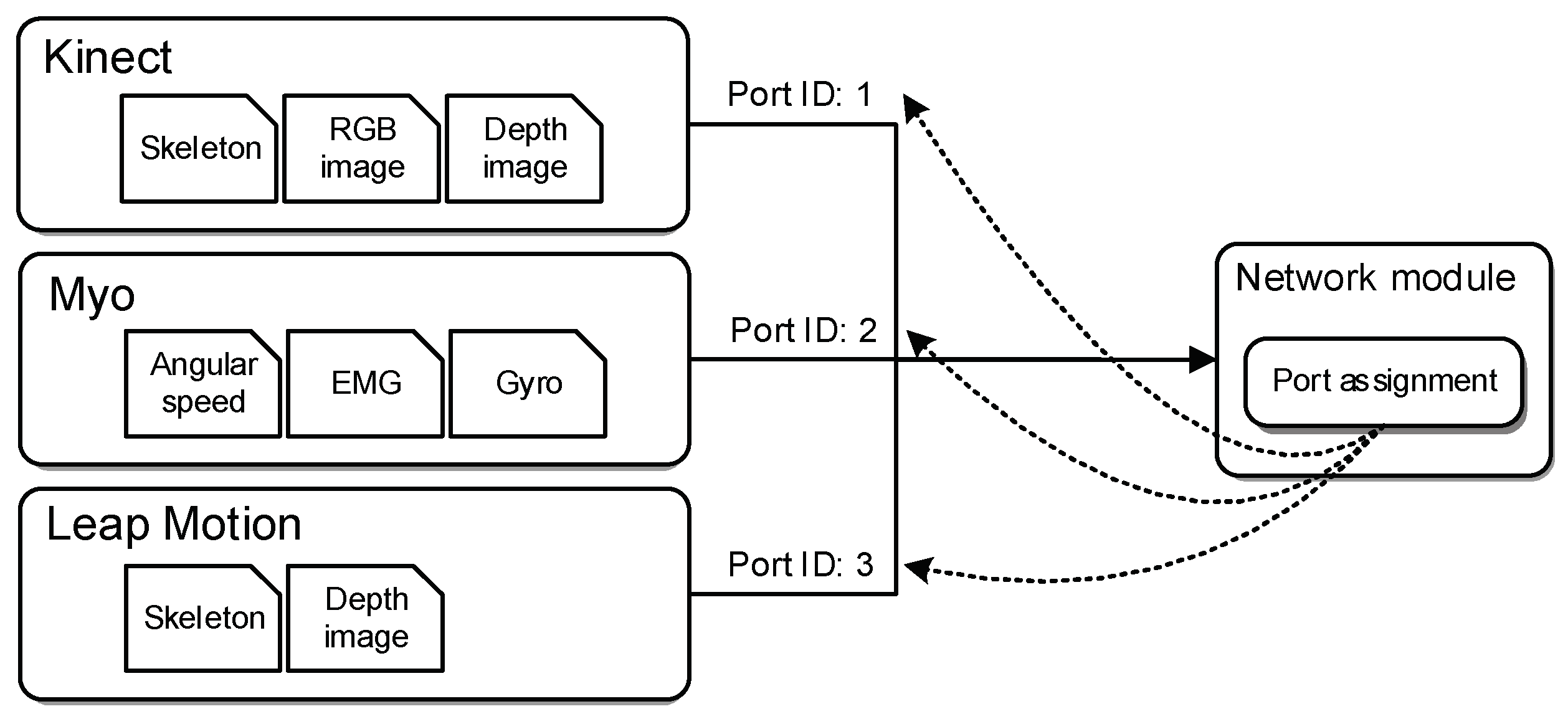
| Sensor | Data Format |
|---|---|
| Kinect | Skeleton orientation (x, y, z) |
| Depth image (d) | |
| RGB image (r, g, b) | |
| Myo | Electromyography () |
| Gyroscope (= orientation) (x, y, z) | |
| Angular speed (s) | |
| Leap Motion | Skeleton orientation (x, y, z) |
| Depth image (d) |
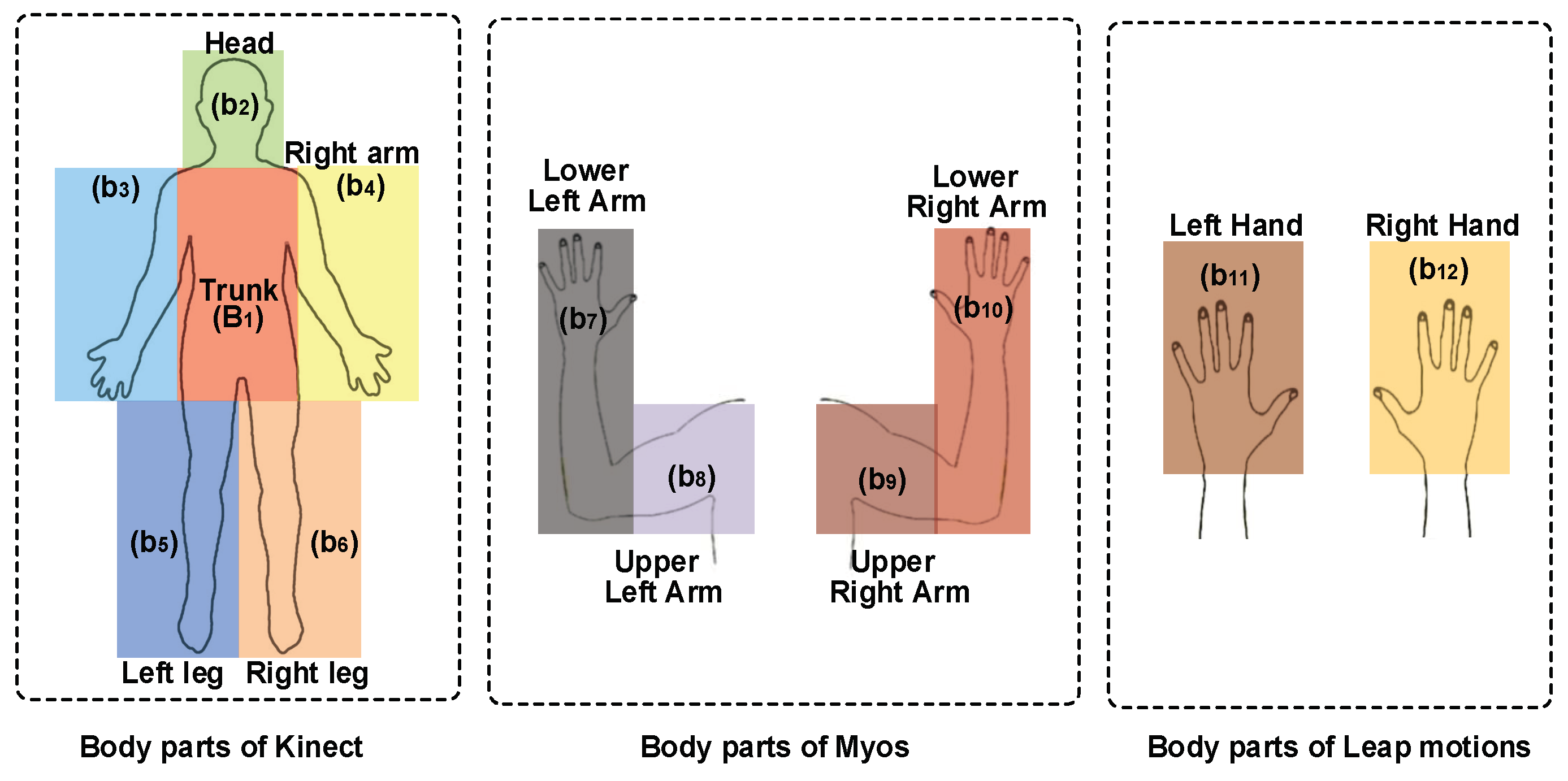
| Device | Body part (Symbol) | Joints (Symbol) |
|---|---|---|
| Kinect | Trunk (b1) | Base spine (s1,1), Mid spine (s1,2), Shoulder spine (s1,3) |
| Head (b2) | Neck (s2,1), Head (s2,2) | |
| Left arm (b3) | Left shoulder (s3,1), Left elbow (s3,2), Left wrist (s3,3), Left hand (s3,4), Left hand tip (s3,5), Left thumb (s3,6) | |
| Right arm (b4) | Right shoulder (s4,1), Right elbow (s4,2), Right wrist (s4,3), Right hand (s4,4), Right hand tip (s4,5), Right thumb (s4,6) | |
| Left leg (b5) | Left hip (s5,1), Left knee (s5,2), Left ankle (s5,3), Left foot (s5,4) | |
| Right leg (b6) | Right hip (s6,1), Right knee (s6,2), Right ankle (s6,3), Right foot (s6,4) | |
| Myo | Lower left arm (b7) | Lower left arm (s7,1) |
| Upper left arm (b8) | Upper left arm (s8,1) | |
| Lower right arm (b9) | Lower right arm (s9,1) | |
| Upper right arm (b10) | Upper right arm (s10,1) | |
| Leap Motion | Left hand (b11) | Palm (s11,1), Wrist (s11,2), Thumb distal (s11,3), Thumb intermediate (s11,4), Thumb proximal (s11,5), Thumb metacarpal (s11,6) Index distal (s11,7), Index intermediate (s11,8), Index proximal (s11,9), Index metacarpal (s11,10) Middle distal (s11,11), Middle intermediate (s11,12), Middle proximal (s11,13), Middle metacarpal (s11,14) Ring distal (s11,15), Ring intermediate (s11,16), Ring proximal (s11,17), Ring metacarpal (s11,18) Pinky distal (s11,19), Pinky intermediate (s11,20), Pinky proximal (s11,21), Pinky metacarpal (s11,22) |
| Right hand (b12) | Palm (s12,1), Wrist (s12,2), Thumb distal (s12,3), Thumb intermediate (s12,4), Thumb proximal (s12,5), Thumb metacarpal (s12,6) Index distal (s12,7), Index intermediate (s12,8), Index proximal (s12,9), Index metacarpal (s12,10) Middle distal (s12,11), Middle intermediate (s12,12), Middle proximal (s12,13), Middle metacarpal (s12,14) Ring distal (s12,15), Ring intermediate (s12,16), Ring proximal (s12,17), Ring metacarpal (s12,18) Pinky distal (s12,19), Pinky intermediate (s12,20), Pinky proximal (s12,21), Pinky metacarpal (s12,22) |
| Gesture 1. Left hand (top→bottom) | Gesture 2. Left hand (bottom→top) |
 |  |
| Gesture 3. Left hand (bottom→middle) | Gesture 4. Right hand (top→bottom) |
 |  |
| Gesture 5. Right hand (bottom→middle) | Gesture 6. Both hands (bottom→top) |
 |  |
| Gesture 7. Both hands (middle→top) | Gesture 8. Both hands (bottom→middle) |
 |  |
| Gesture 9. Both hands (bottom→top→bottom) | Gesture 10. Both hands (middle→bottom) |
 |  |
| One Gesture During Testing | Collected Gesture Based on Each Selected Body Part | ||
|---|---|---|---|
 |  Left arm |  Right arm |  Both arms |
| Gesture type | Average Sensing Values for Three Participants | Gesture Type | Average Sensing Values for Three Participants |
|---|---|---|---|
| Gesture 1 |  | Gesture 6 |  |
| Gesture 2 |  | Gesture 7 |  |
| Gesture 3 |  | Gesture 8 |  |
| Gesture 4 |  | Gesture 9 |  |
| Gesture 5 |  | Gesture 10 |  |
 horizontal axis: frame count, vertical axis: x, y, z value | |||
| Editing | Images of Frames | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Before editing |  |  |  |  |  |  |  |  |  |
| Frame | 1–9 | 10–19 | 20–29 | 30–39 | 40–49 | 50–59 | 60–69 | 70–79 | 80 |
| After editing |  |  |  |  |  |  |  | ||
| Frame | 1–9 | 10–19 | 20–29 | 30–39 | 40–49 | 50–59 | 60 | ||
| Algorithm | HMM | Dynamic RNN | DTW |
|---|---|---|---|
| Gesture Type | |||
| Gesture 1 | 94.25 | 94.17 | 87.75 |
| Gesture 2 | 91.92 | 92.75 | 82.58 |
| Gesture 3 | 91.75 | 91.50 | 91.67 |
| Gesture 4 | 92.33 | 92.08 | 88.58 |
| Gesture 5 | 91.50 | 90.42 | 77.75 |
| Gesture 6 | 90.75 | 90.17 | 82.75 |
| Gesture 7 | 92.25 | 91.08 | 78.25 |
| Gesture 8 | 91.58 | 90.75 | 78.67 |
| Gesture 9 | 92.08 | 91.08 | 74.17 |
| Gesture 10 | 91.58 | 92.92 | 74.92 |
| Total average recognition accuracy | 92.00% | 91.69% | 81.71% |
| 1 | 2 | 3 |
 |  |  |
| 4 | 5 | 6 |
 |  |  |
| 7 | 8 | 9 |
 |  |  |
| 10 | 11 | 12 |
 |  |  |
| 13 | 14 | 15 |
 |  |  |
| 16 | 17 | 18 |
 |  |  |
| 19 | 20 | 21 |
 |  |  |
| 22 | 23 | 24 |
 |  |  |
| 25 | 26 | 27 |
 |  |  |
| 28 | 29 | 30 |
 |  |  |
| Scene No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Similarity rate | 86.3% | 97.8% | 24.3% | 65.4% | 74.3% | 85.4% | 24.3% | 74.3% | 94.3% | 54.3% |
| Recognition result | True | True | False | True | True | True | False | True | True | True |
| Scene no. | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Similarity rate | 84.3% | 75.3% | 43.2% | 95.5% | 43.4% | 83.2% | 64.3% | 74.3% | 62.1% | 77.2% |
| Recognition result | True | True | True | True | True | True | True | True | True | True |
| Scene no. | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| Similarity rate | 85.2% | 4.3% | 64.3% | 86.5% | 48.1% | 84.3% | 94.3% | 84.3% | 74.3% | 79.9% |
| Recognition result | True | False | True | True | True | True | True | True | True | True |
| Avg. recognition accuracy | 90.0% | |||||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Jin, Y.; Cho, S.; Sung, Y.; Cho, K. Advanced Machine Learning for Gesture Learning and Recognition Based on Intelligent Big Data of Heterogeneous Sensors. Symmetry 2019, 11, 929. https://doi.org/10.3390/sym11070929
Park J, Jin Y, Cho S, Sung Y, Cho K. Advanced Machine Learning for Gesture Learning and Recognition Based on Intelligent Big Data of Heterogeneous Sensors. Symmetry. 2019; 11(7):929. https://doi.org/10.3390/sym11070929
Chicago/Turabian StylePark, Jisun, Yong Jin, Seoungjae Cho, Yunsick Sung, and Kyungeun Cho. 2019. "Advanced Machine Learning for Gesture Learning and Recognition Based on Intelligent Big Data of Heterogeneous Sensors" Symmetry 11, no. 7: 929. https://doi.org/10.3390/sym11070929
APA StylePark, J., Jin, Y., Cho, S., Sung, Y., & Cho, K. (2019). Advanced Machine Learning for Gesture Learning and Recognition Based on Intelligent Big Data of Heterogeneous Sensors. Symmetry, 11(7), 929. https://doi.org/10.3390/sym11070929