Optimization of Energetic Train Cooperation



Abstract
:1. Introduction
- using directly on non-traction vehicle needs, e.g., lighting or air conditioning,
- storing in stationary or onboard energy storage devices, and then use at the time of increased demand,
- transmitting recovered energy back to the national power grid,
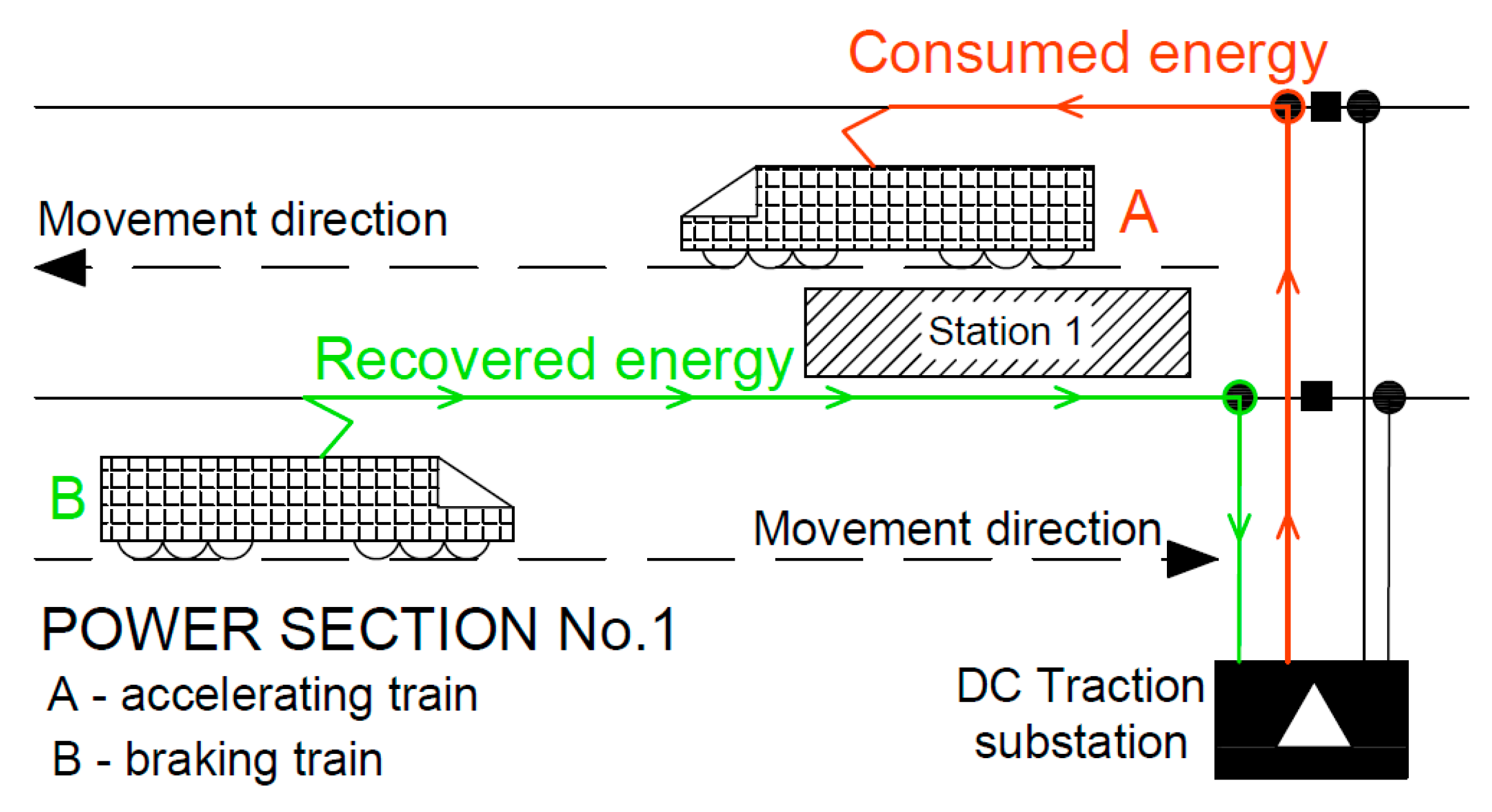
- transferring recovered electricity back to the catenary, given the possibility of its immediate absorption by another, accelerating train.
2. Energy Recovery in Railway Systems Literature Review
2.1. Energy Storage
- large number of load cycles,
- high power capacities,
- intermediate energy storage capacity,
- reduced weight and volume.
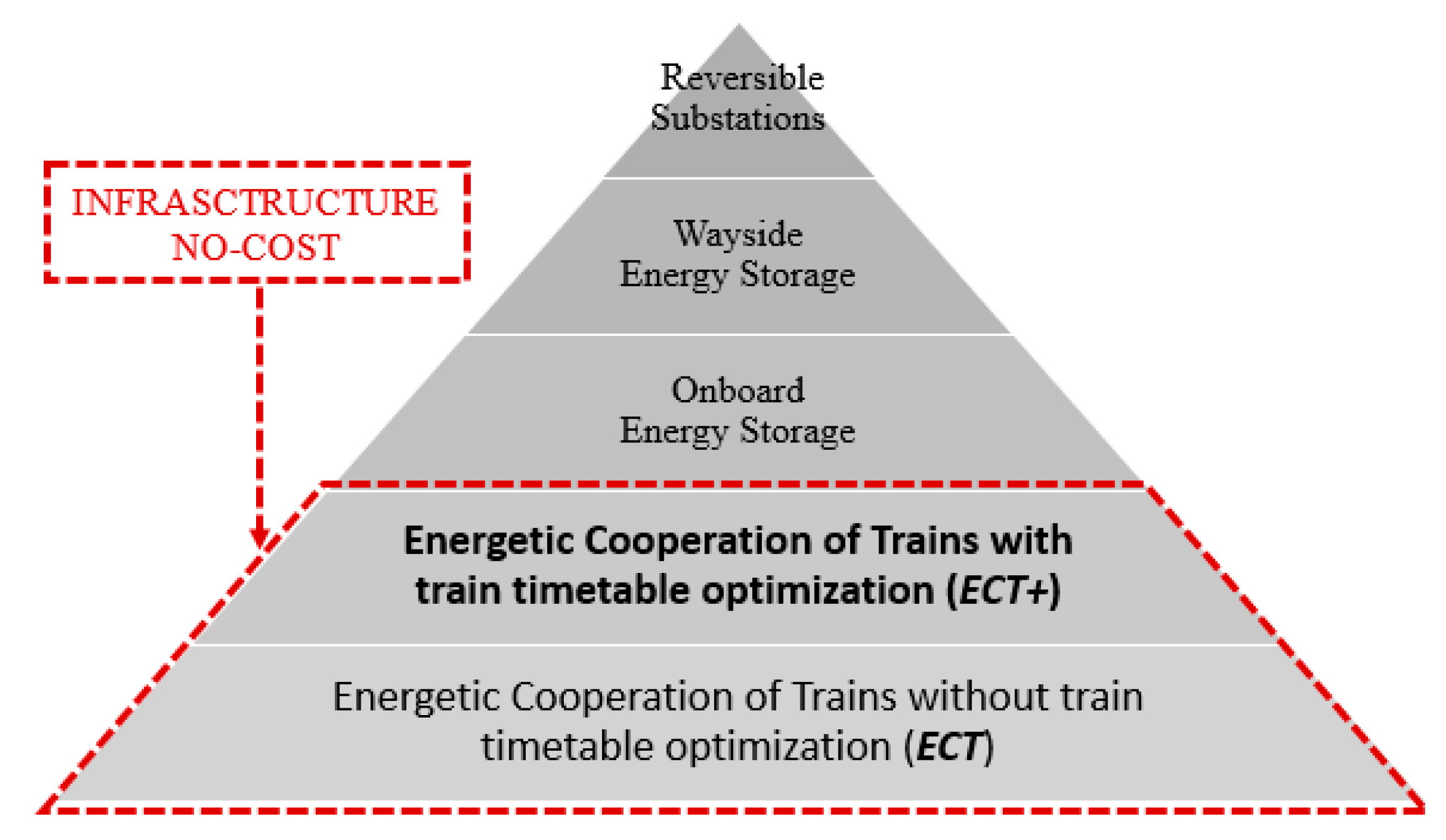
2.2. Reversible Substations
2.3. Energetic Cooperation of Trains (ECT)
- increasing the probability of the braking and accelerating cycles of several trains at the same time existing by elongating the length of power sections,
- reducing the distance between cooperating trains or resistance of catenary which also means reducing losses and voltage drops in the energy transmission path,
- additional use of energy storage for excess electricity,
- increasing the voltage difference between the nearest power substation and the braking vehicle pantograph.
3. Materials and Methods
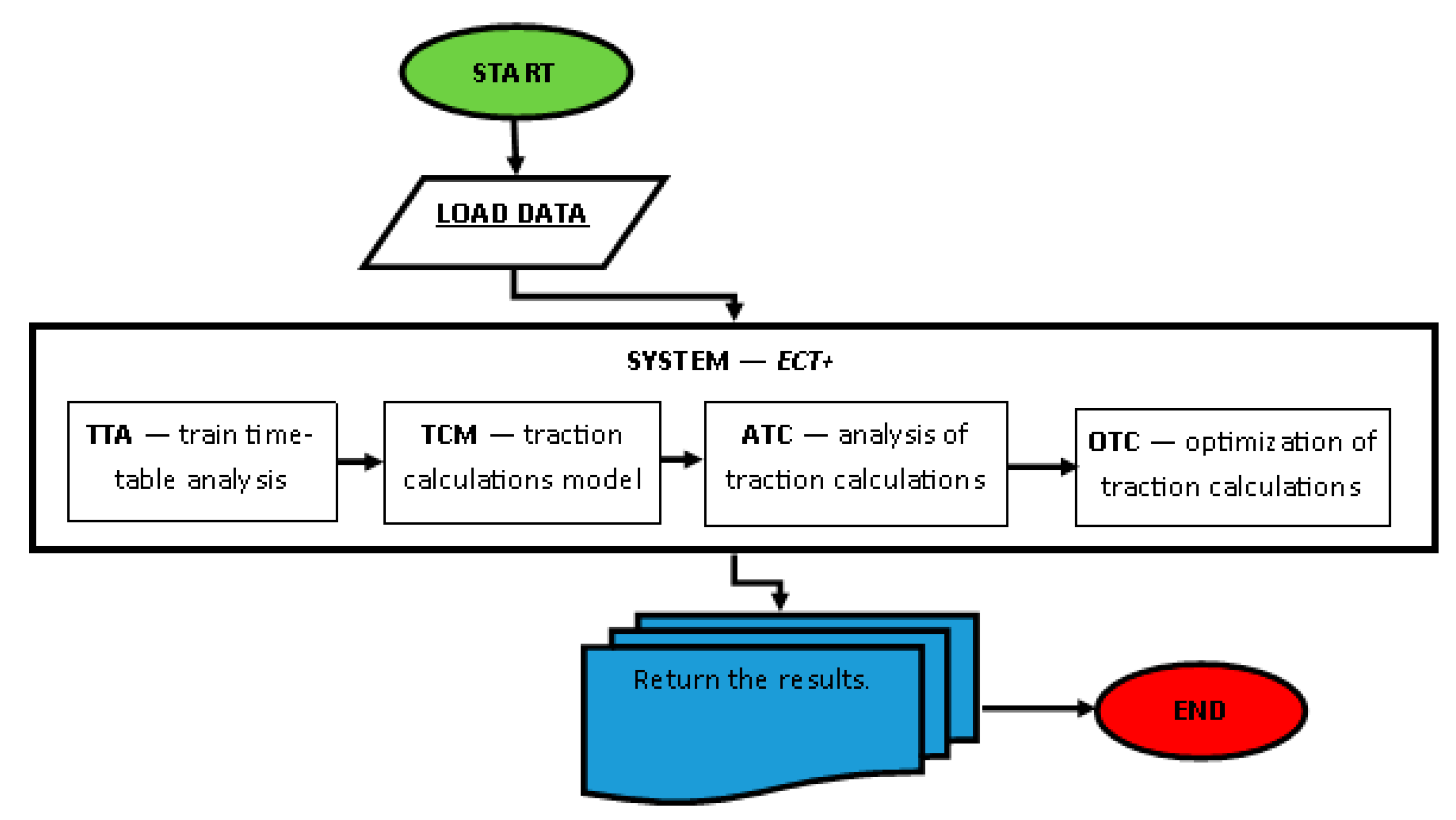
3.1. Energetic Cooperation of Trains (ECT+)
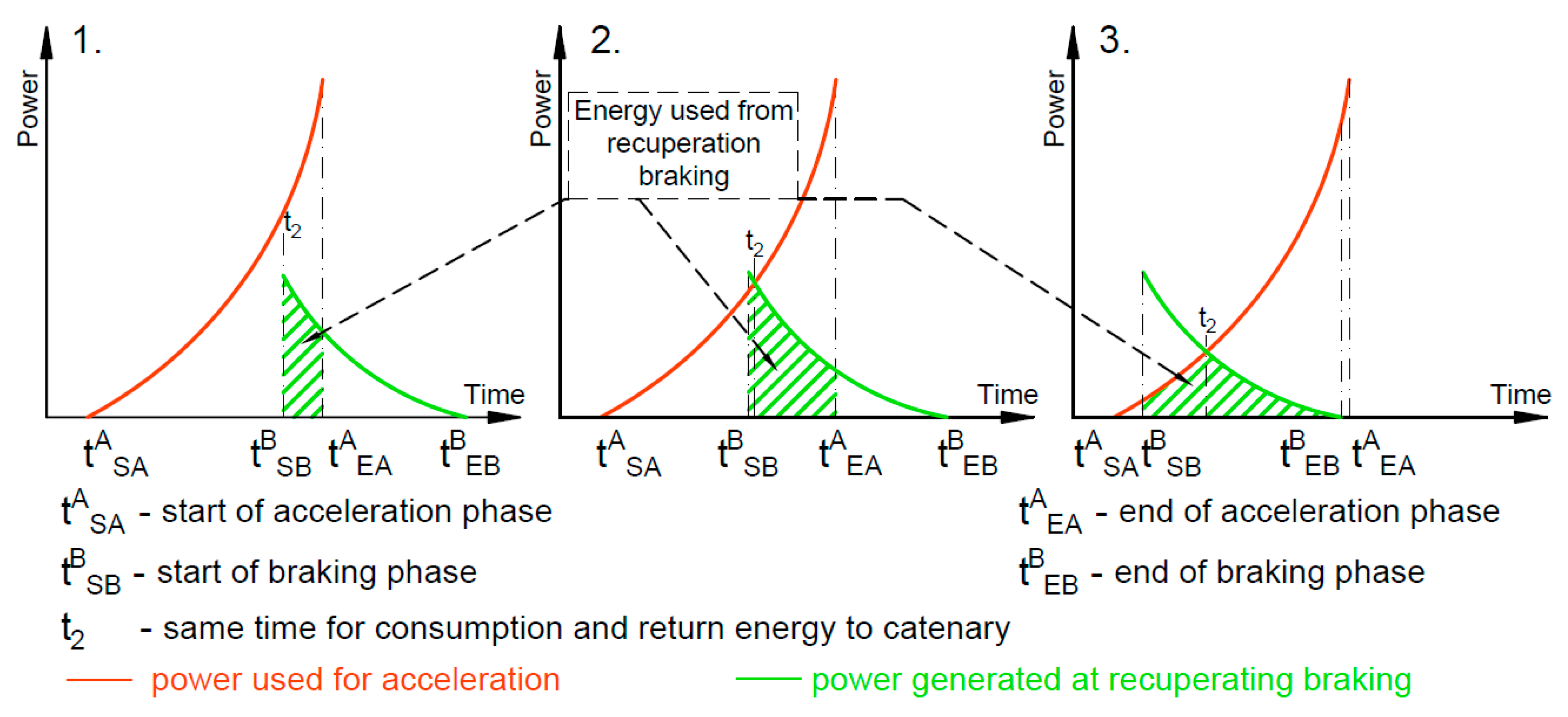
3.1.1. Choosing the Method of Using Recovered Energy
3.1.2. Model for Using Recovered Energy
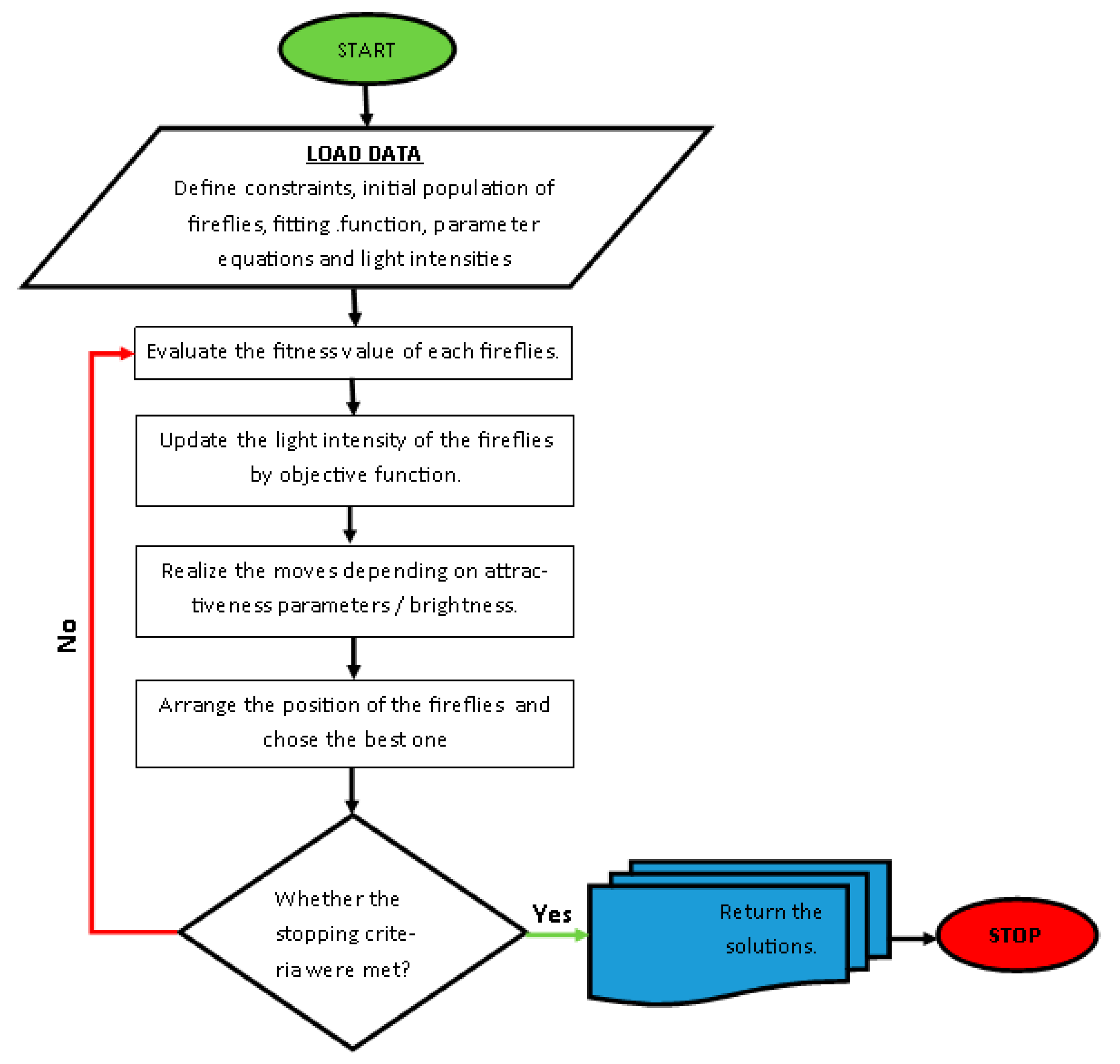
3.1.3. Optimization Model
- : the actual value of the energy consumed during the passage of the train B and the passage fragment of the train A,
- : the amount of energy needed to perform the passage of the train B and the passage fragment of the train A,
- : energy recovered during the electrodynamic braking of vehicle B and used in the energetic cooperation of both trains B and A.
3.2. Optimization of Using Recuperative Braking Energy at Sample Railway Line
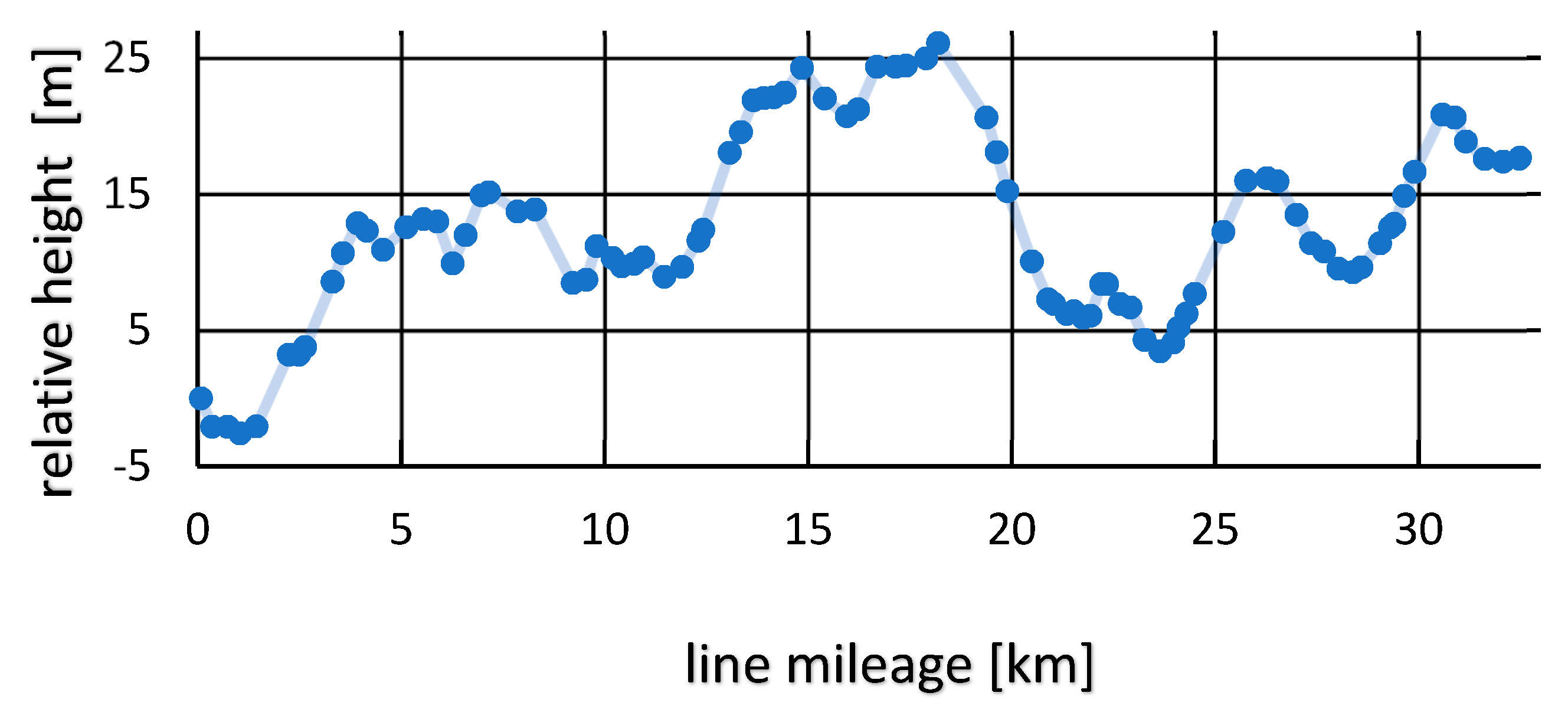
Characteristics of the Rolling Stock and Selected Railway Line
4. Results
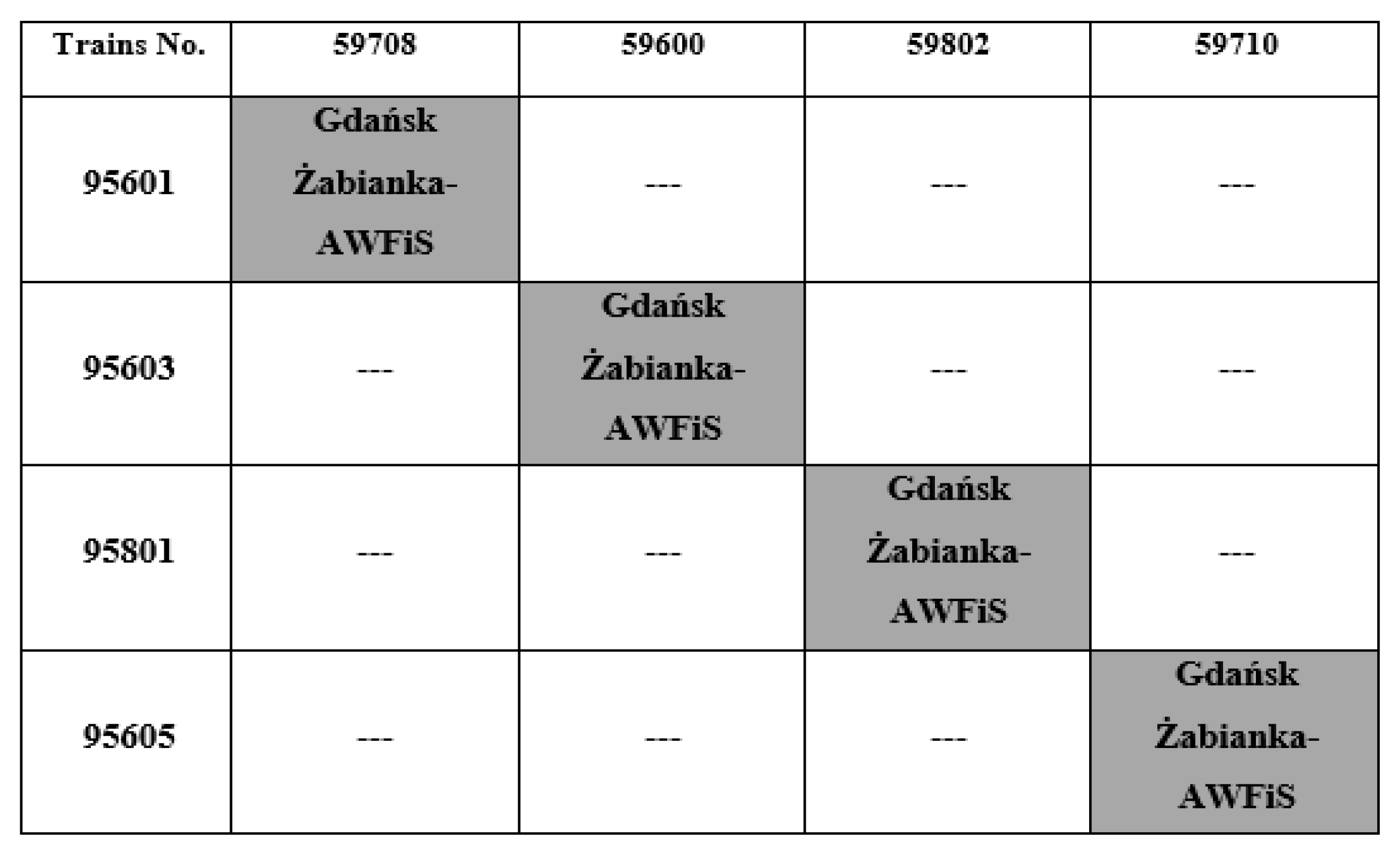
4.1. Optimization Results for Selected Train Stops
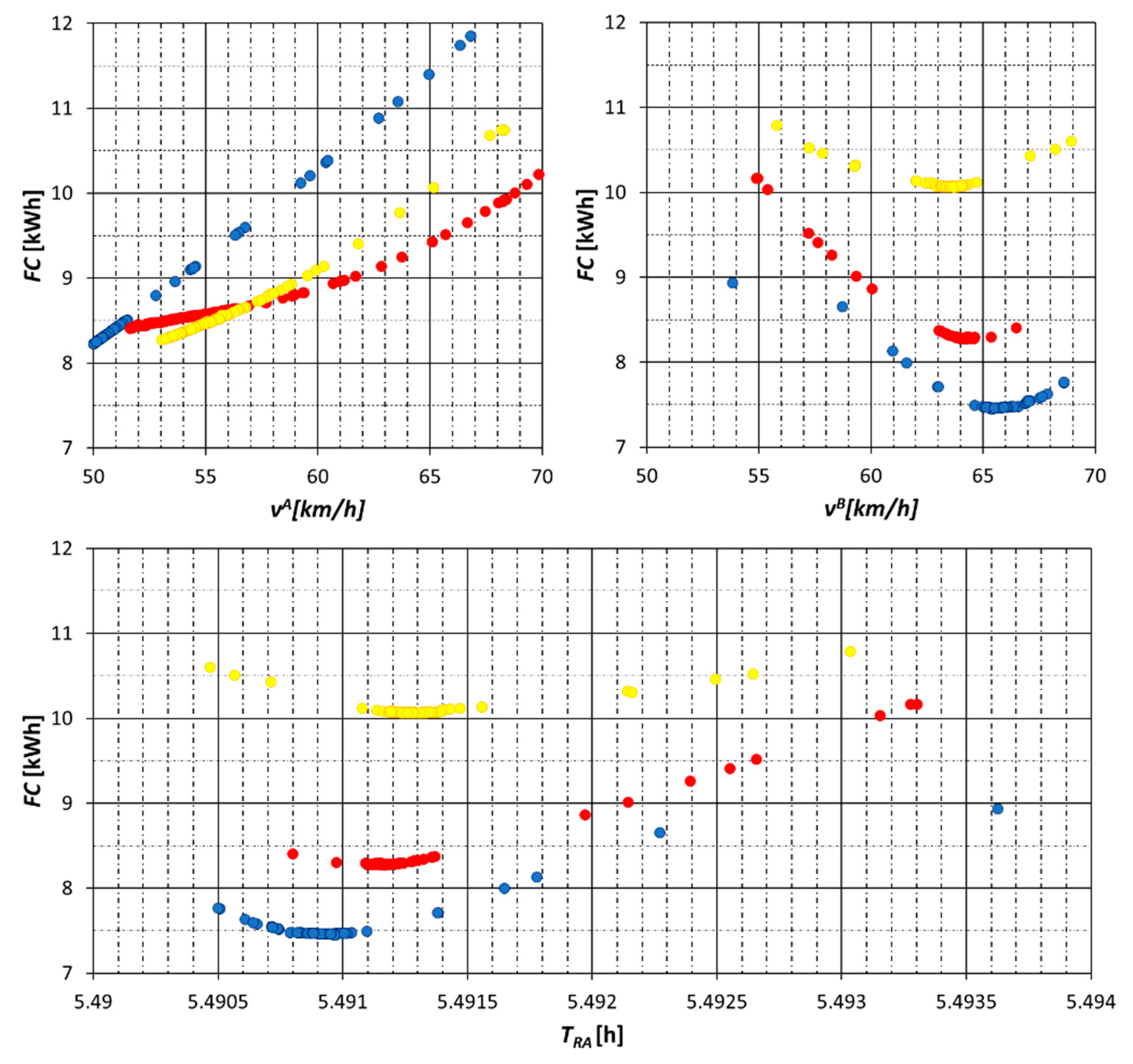
4.2. Summary of Findings
- the value of energy that can be reused during energetic cooperation of a train pair ERS = 5.7555 kWh,
- the value of energy recoverable in the recuperation process ER = 8.7745 kWh,
- the value of energy required to make a selected part of the drive EP = 15.3863 kWh,
- the value of global function F(vA*, vB*) = 7.8826 kWh.
5. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jachimowski, R.; Szczepański, E.; Kłodawski, M.; Markowska, K.; Dąbrowski, J. Selection of a container storage strategy at the rail-road intermodal terminal as a function of minimization of the energy expenditure of transshipment devices and CO2 emissions. Annu. Set Environ. Prot. 2018, 20, 965–988. [Google Scholar]
- Wasiak, M.; Jacyna-Gołda, I.; Markowska, K.; Jachimowski, R.; Kłodawski, M.; Izdebski, M. The use of a supply chain configuration model to assess the reliability of logistics processes. Eksploat. Niezawodn. 2019, 3, 367–374. [Google Scholar] [CrossRef]
- Szeląg, A. Electrical power infrastructure for modern rolling stock with regard to the railway in Poland. Arch. Transp. 2017, 42, 75–83. [Google Scholar] [CrossRef]
- Jacyna, M.; Szczepański, E.; Izdebski, M.; Jasiński, S.; Maciejewski, M. Characteristics of event recorders in Automatic Train Control systems. Arch. Transp. 2018, 46, 61–70. [Google Scholar] [CrossRef]
- Jacyna, M.; Gołębiowski, P.; Urbaniak, M. Multi-option model of railway traffic organization including the energy recuperation. Chall. Transp. Telemat. 2016, 640, 199–210. [Google Scholar]
- Jacyna-Gołda, I.; Izdebski, M.; Podviezko, A. Assessment of the efficiency of assignment of vehicles to tasks in supply chains: A case-study of a municipul company. Transport 2017, 32, 243–251. [Google Scholar] [CrossRef]
- Jacyna, M.; Izdebski, M.; Szczepański, E.; Gołda, P. The task assignment of vehicles for a production company. Symmetry 2018, 11, 551. [Google Scholar] [CrossRef]
- González-Gil, A.; Palacin, R.; Batty, P. Sustainable urban rail systems: Strategies and technologies for optimal management of regenerative braking energy. Energy Convers. Manag. 2013, 75, 374–388. [Google Scholar] [CrossRef]
- González-Gil, A.; Palacin, R.; Batty, P.; Powell, J. Energy-efficient urban rail systems: Strategies for an optimal management of regenerative braking energy. In Proceedings of the Transport Research Arena 2014, Paris, France, 14–17 April 2014. [Google Scholar]
- Akiyama, S.; Tsutsumi, K.; Matsuki, S. The Development of Low Floor Battery-Driven Lrv “SWIMO”. Available online: www.railway-research.org/IMG/pdf/r.2.2.3.2.pdf (accessed on 1 June 2019).
- Kono, Y.; Shiraki, N.; Yokoyama, H.; Furuta, R. Catenary and Storage Battery Hybrid System for Electric Railcar Series EV-E301. In Proceedings of the International Power Electronics Conference 2014, Hiroshima, Japan, 18–21 May 2014. [Google Scholar]
- Batteries Included: Prototype Battery-Powered Train Carries Passengers for First Time. Available online: http://www.networkrailmediacentre.co.uk/news/batteries-included-prototype-battery-powered-train-carries-passengers-for-first-time (accessed on 1 June 2019).
- Ribeiro, P.; Johnson, B.; Crow, M.; Arsoy, A.; Liu, Y. Energy storage systems for advanced power applications. IEEE Trans. Med. Imaging 2001, 12, 1744–1756. [Google Scholar] [CrossRef]
- Chymera, M.; Renfrew, A.; Barnes, M. Analizing the potential of energy storage on electrified transit systems. In Proceedings of the World Congress on Railway Research—WCRR 2008, Seoul, Korea, 22 May 2008. [Google Scholar]
- Dominguez, M.; Cucala, A.P.; Fernandez, A.; Pecharroman, R.R.; Blanquer, J. Energy efficiency on train control—Design of metro ATO driving and impact of energy accumulation devices. In Proceedings of the World Congress on Railway Research—WCRR 2011, Lille, France, 22–26 May 2011. [Google Scholar]
- Iannuzzi, D.; Tricoli, P. Metro trains equipped onboard with super-capacitors: A control technique for energy saving. In Proceedings of the SPEEDAM 2010—International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Pisa, Italy, 14–16 June 2010. [Google Scholar]
- Ciccarelli, F.; Tricoli, P.; Iannuzzi, D. Control of metro-trains equipped with onboard supercapacitors for energy saving and reduction of power peak demand. Transp. Res. Part C Emerg. Technol. 2012, 24, 36–49. [Google Scholar] [CrossRef]
- Allegre, A.L.; Bouscayrol, A.; Delarue, P.; Barrade, P.; Chattot, E.; El-Fassi, S. Energy storage system with supercapacitor for an innovative subway. IEEE Trans. Ind. Electron. 2010, 57, 4001–4012. [Google Scholar] [CrossRef]
- Swanson, J. Light rail systems without wires? In Proceedings of the Rail Conference 2003, Chicago, IL, USA, 22–24 April 2003. [Google Scholar]
- Taguchi, Y.; Terada, Y.A.; Miki, M.; Hatakeda, K.; Kimura, T. Evaluation of a Thermal Network Model for the Traction Battery of the Battery-Powered EMU. In Proceedings of the Vehicle Power and Propulsion Conference 2015, Montreal, QC, Canada, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Urbaniak, M.; Jacyna, M.; Kardas-Cinal, E. Metody wykorzystania energii z rekuperacji w transporcie szynowym. Tech. Transp. Szyn. 2016, 12, 355–359. (In Polish) [Google Scholar]
- Barrero, R.; Tackoen, X.; van Mirelo, J. Stationary or onboard energy storage systems for energy consumption reduction in a metro network. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2010, 224, 207–225. [Google Scholar] [CrossRef]
- Teymourfar, R.; Asaei, B.; Iman-Eini, H.; Nejati Fard, R. Stationary super-capacitor energy storage system to save regenerative braking energy in metro line. Energy Conver. Manag. 2012, 56, 206–214. [Google Scholar] [CrossRef]
- Warin, Y.; Lanselle, R.; Thiounn, M. Active substation. In Proceedings of the World Congress on Railway Research—WCRR 2011, Lille, France, 22–26 May 2011. [Google Scholar]
- Ibaiondo, H.; Romo, A. Kinetic energy recovery on railway systems with feedback to the grid. In Proceedings of the World Congress on Railway Research—WCRR 2011, Lille, France, 22–26 May 2011. [Google Scholar]
- Cornic, D. Efficient recovery of breaking energy through a reversible DC substation. In Proceedings of the World Congress on Railway Research—WCRR 2011, Lille, France, 22–26 May 2011. [Google Scholar]
- Pazdro, P. Koncepcja ruchowej optymalizacji efektywności hamowania odzyskowego. Tech. Transp. Szyn. 2013, 1–2, 62–64. (In Polish) [Google Scholar]
- Czucha, J.; Karwowski, K.; Mizan, M.; Pazdro, P. Efektywność odzysku energii hamowania elektrodynamicznego w komunikacji miejskiej. Przegląd Elektrotechniczny 2004, 80, 1016–1019. (In Polish) [Google Scholar]
- Pena-Alcaraz, M.; Fernández, A.; Cucala, A.; Ramos, A.; Pecharromán, R. Optimal underground timetable design based on power flow for maximizing the use of regenerative-braking energy. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2012, 226, 397–408. [Google Scholar] [CrossRef]
- Nasri, A.; Fekri Moghadam, M.; Mokhtari, H. Timetable optimization for maximum usage of regenerative energy of braking in electrical railway systems. In Proceedings of the SPEEDAM 2010—International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Pisa, Italy, 14–16 June 2010. [Google Scholar]
- Yang, X.; Ning, B.; Li, X.; Tang, T. A Two-Objective Timetable Optimization Model in Subway Systems. IEEE Trans. Intell. Transp. Syst. 2014, 5, 1913–1921. [Google Scholar] [CrossRef]
- Szeląg, A. Efektywność hamowania odzyskowego w zelektryfikowanym transporcie szynowym. Pojazdy Szynowe 2009, 4, 9–16. (In Polish) [Google Scholar]
- Podoski, J.; Masłek, J.; Kacprzak, J. Zasady Trakcji Elektrycznej; Wydawnictwo Komunikacji i Łączności: Warsaw, Poland, 1980. (In Polish) [Google Scholar]
- Su, S.; Tang, T.; Roberts, C. A Cooperative Train Control Model for Energy Saving. IEEE Intell. Transp. Syst. Soc. 2015, 16, 622–631. [Google Scholar] [CrossRef]
- Su, S.; Tang, T.; Wang, Y. Evaluation of Strategies to Reducing Traction Energy Consumption of Metro Systems Using an Optimal Train Control Simulation Model. Energies 2016, 9, 105. [Google Scholar] [CrossRef]
- Urbaniak, M. The Model of Railway Traffic Organization Given an Energy Recuperation. Ph.D. Thesis, Warsaw University of Technology, Faculty of Transport, Warsaw, Poland, 2018. [Google Scholar]
- Yang, X.S. Firefly algorithms for multimodal optimisation. Comput. Sci. 2009, 5792, 169–178. [Google Scholar]
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms, 2nd ed.; Luniver Press: Sunnyvale, CA, USA, 2010. [Google Scholar]
- Elektryczne Zespoły Trakcyjne z Rodziny Impuls. Available online: http://www.newag.pl/oferta/elektryczne-zespoly-trakcyjne/impuls/ (accessed on 1 June 2019). (In Polish).
- Timetable for PKP Szybka Kolej Miejska w Trójmieście Sp.zo.o. Available online: https://www.skm.pkp.pl/dla-pasazera/informacje-dla-podroznych/szczegoly-informacji (accessed on 1 June 2019). (In Polish).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Main Features | Application in Urban Rail | Year |
|---|---|---|---|
| EDLC | Rated power: 288 kW Capacity: 0.85 kWh Weight: 820 kg Dimensions: 2000 × 1520 × 630 mm | Commercial application in Innsbruck tramway (Germany) | 2012 |
| EDLC | Rated power: N/A Capacity: 0.8 kWh Weight: 800 kg Dimensions: N/A | Commercial application in Seville, Saragossa (Spain) and Granada tramway systems, in service (France) | 2012/2010 |
| Li-ion | Rated power: N/A Capacity: 40 kWh Weight: 3200 kg Dimensions: N/A | Prototype tests in Charlotte (USA) | 2010 |
| NiMH | Rated power: 250 kW Capacity: 120 kWh Weight: 3200 kg Dimensions: N/A | Prototype tests in Sapporo Municipal Transport network (Japan) | 2011 |
| Technology | Main Features | Application in Urban Rail | Year |
|---|---|---|---|
| EDLC | Generated voltage: 750 V Rated power: 300–1000 kW Capacity: 1–4 kWh | Pilot project for Lyon tramway | 2011/Adetel |
| EDLC | Generated voltage: 500–1850 V Rated power: 750–4500 kW Capacity: 0.8–16.5 kWh | Warsaw metro, to be implemented, pilot project for Philadelphia transit system (battery-based) | 2012/2016/ABB |
| Flywheel | Generated voltage: N/A Rated power: 500 kW Capacity: N/A | Los Angeles metro line | 2013/Vycon |
| NiMH | Generated voltage: 600–1500 V Rated power: N/A Capacity: 150–400 kWh | New York City Transit network, pilot project | 2011/Ogura |
| Li-ion | Generated voltage: 700 V Rated power: 900–1500 kW Capacity: 600–40 kWh | Philadelphia transit system, pilot project | 2012/Polulin |
| Company | Main Features | References | Year |
|---|---|---|---|
| Alstom | Rated voltage: 750 V Rated power: 0.3 MW | Metro line in London and Milan | 2011 |
| Siemens | Rated voltage: 750–1500 V Rated power: 1.5–2.2 MW | Tested in Oslo’s and Holmenkollen’s metro line | 2011 |
| ABB | Rated voltage: 600/750 V Rated power: 0.5–1 MW | Tramway in Łódź and Olsztyn (Poland) | 2014/2016 |
| Number of cars | 5 |
| Formation | Bo′2′2′Bo′ + Bo′2′2′Bo′ |
| Own weight | 159 t +/− 3% |
| Gross weight | 202 t +/− 3% |
| Rated power | 2000 kW |
| Traction system | 3000 V |
| Maximum speed | 160 km/h |
| Acceleration for 0–40 km/h | 1.0 m/s2 |
| Acceleration above 40 km/h | ≥1.0 m/s2 |
| Deceleration of operational braking | ≥0.8 m/s2 |
| Deceleration of emergency braking | ≥1.0 m/s2 |
| Recuperation | yes |
| Trains No. | ERS [kWh] | ER [kWh] | EP [kWh] | F(vA*, vB*) [kWh] | TRA [h:min:s] (Clock Time) | vA [km/h] | vB* [km/h] | |
|---|---|---|---|---|---|---|---|---|
| A | B | |||||||
| Gdańsk Żabianka AWFiS | ||||||||
| 95601 | 59708 | 5.8775 | 9.6785 | 15.3720 | 7.4583 | 5:29:27 | 50.33 | 65.37 |
| 95603 | 59600 | 5.9587 | 9.6937 | 15.4080 | 7.4800 | 6:04:28 | 50.58 | 65.47 |
| 95605 | 59710 | 6.4261 | 9.0374 | 15.9351 | 7.9553 | 6:29:29 | 55.36 | 63.17 |
| 95415 | 59810 | 5.9587 | 8.9380 | 16.0514 | 8.0478 | 8:34:29 | 55.82 | 62.8 |
| 59610 | 95419 | 6.2534 | 8.9019 | 16.9899 | 8.6430 | 8:55:29 | 51.49 | 63.47 |
| 95761 | 59760 | 6.2441 | 9.6005 | 15.6576 | 7.6534 | 14:59:28 | 53.29 | 65.16 |
| 59468 | 95467 | 6.4237 | 8.9019 | 17.8147 | 9.1379 | 17:55:29 | 57.06 | 63.47 |
| 95791 | 59782 | 6.3837 | 9.7561 | 15.3900 | 7.4527 | 18:04:27 | 50.2 | 65.65 |
| 95685 | 59478 | 6.5921 | 9.5957 | 15.3779 | 7.4853 | 19:59:28 | 50.44 | 65.09 |
| 95697 | 59694 | 6.3807 | 9.8391 | 15.4240 | 7.4520 | 22:49:27 | 50.1 | 65.94 |
| Gdynia Orłowo | ||||||||
| 59716 | 95719 | 7.0043 | 9.16.59 | 18.3182 | 9.3757 | 7:13:27 | 58.02 | 64.67 |
| 59606 | 95721 | 7.1109 | 9.2190 | 18.3029 | 9.3671 | 7:28:28 | 58.06 | 64.9 |
| Gdynia Cisowa | ||||||||
| 95601 | 59710 | 6.1607 | 7.9193 | 15.6092 | 8.4376 | 5:58:03 | 56.81 | 56.71 |
| 95757 | 59760 | 5.3625 | 7.8543 | 14.0660 | 7.4898 | 14:28:25 | 49.75 | 56.4 |
| 95759 | 59816 | 0.0780 | 5.6043 | 8.8120 | 6.2017 | 15:09:01 | 47.06 | 45.87 |
| 95633 | 59612 | 5.0299 | 7.9012 | 13.7099 | 7.2853 | 15:20:24 | 47.17 | 56.59 |
| 95761 | 59766 | 4.5986 | 7.9514 | 13.3286 | 7.0807 | 15:29:23 | 44.03 | 56.87 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urbaniak, M.; Kardas-Cinal, E.; Jacyna, M. Optimization of Energetic Train Cooperation. Symmetry 2019, 11, 1175. https://doi.org/10.3390/sym11091175
Urbaniak M, Kardas-Cinal E, Jacyna M. Optimization of Energetic Train Cooperation. Symmetry. 2019; 11(9):1175. https://doi.org/10.3390/sym11091175
Chicago/Turabian StyleUrbaniak, Michał, Ewa Kardas-Cinal, and Marianna Jacyna. 2019. "Optimization of Energetic Train Cooperation" Symmetry 11, no. 9: 1175. https://doi.org/10.3390/sym11091175
APA StyleUrbaniak, M., Kardas-Cinal, E., & Jacyna, M. (2019). Optimization of Energetic Train Cooperation. Symmetry, 11(9), 1175. https://doi.org/10.3390/sym11091175