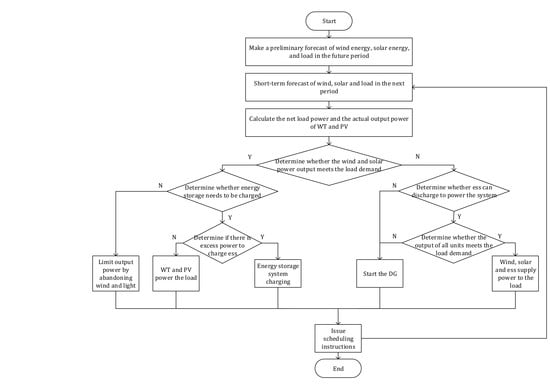
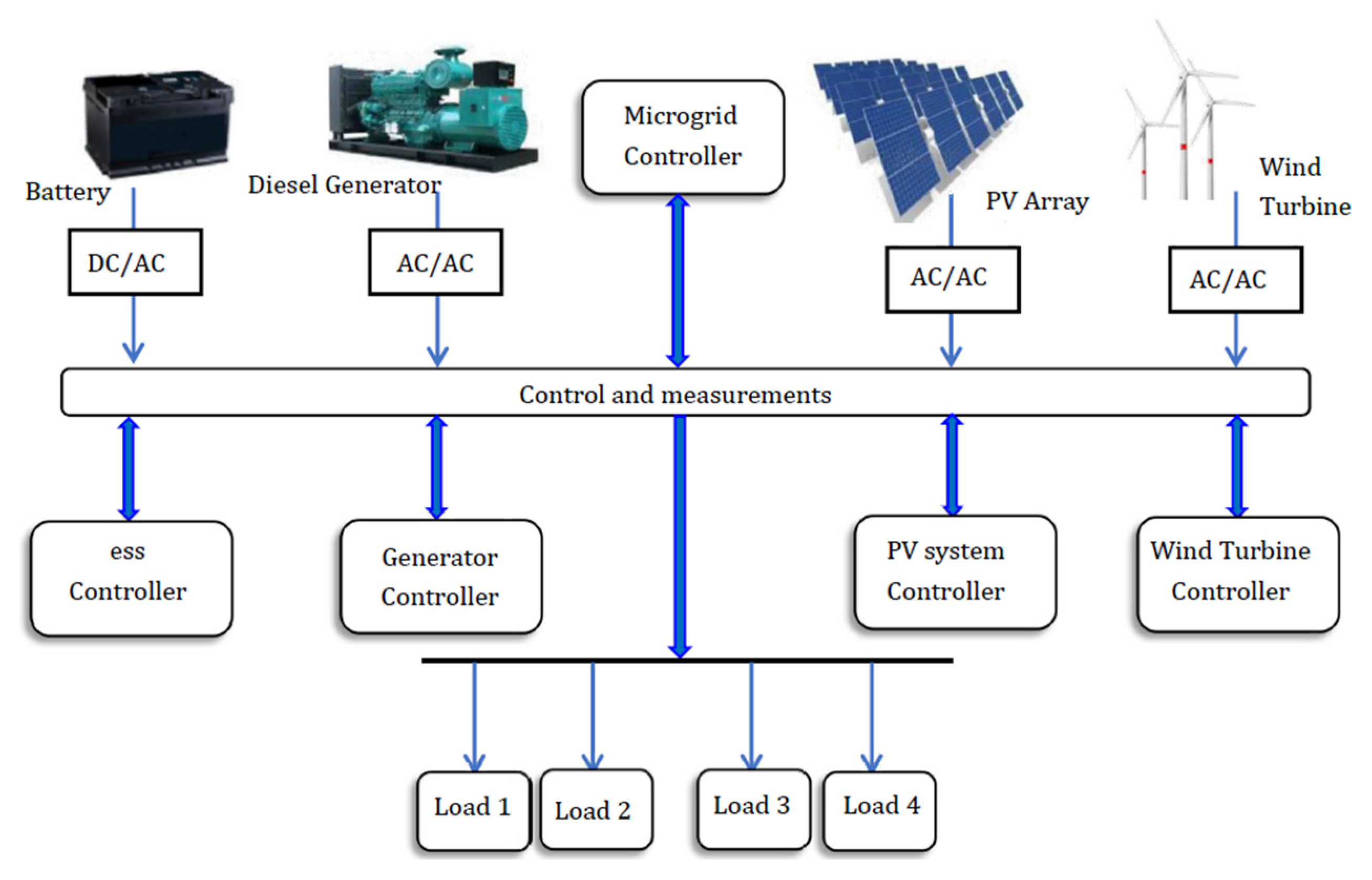
In order to solve the problem of optimal operation and scheduling of islanded microgrid, it is usually more effective to use the energy optimization management method with multi-period coordination. The flow chart in
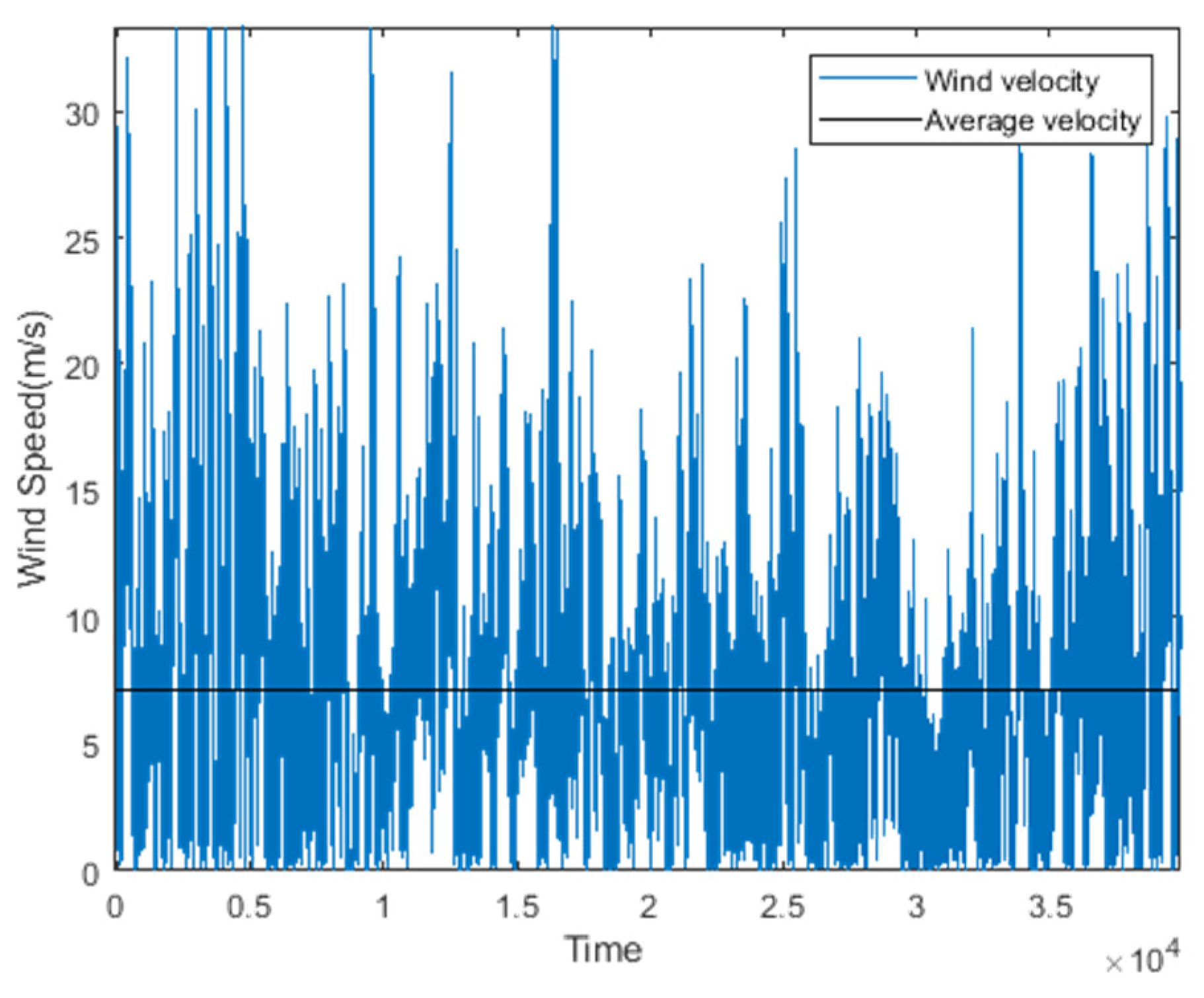
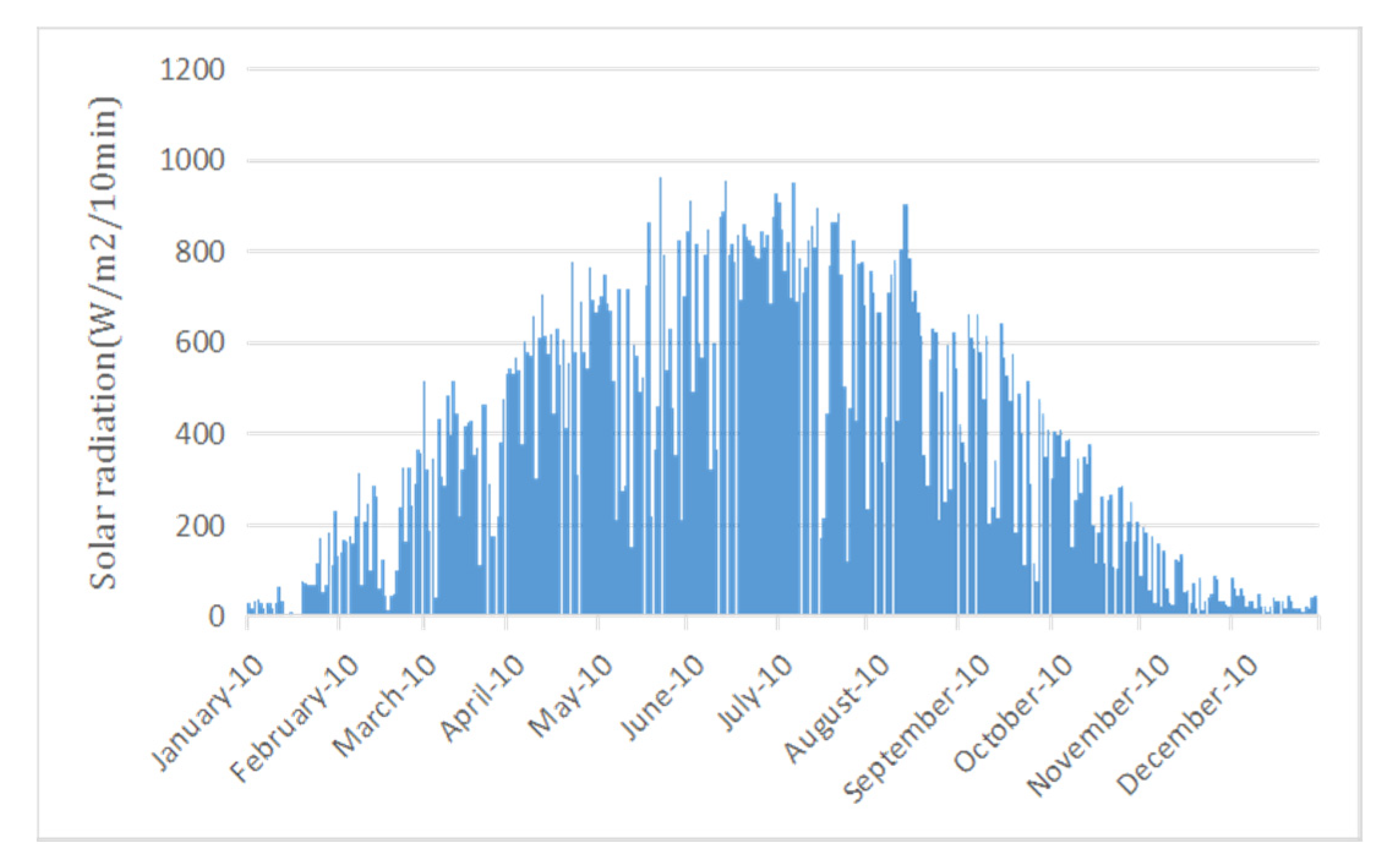
Figure 2 demonstrates the scheduling strategy proposed in this paper. Since the islanded microgrid system can only use the power output power of the WT and PV power generation system, it is necessary to predict the wind, solar and load demand in the future in advance. Due to the volatility of wind and solar energy, further short-term forecasting of wind and solar energy is needed to ensure the accuracy of the forecast. After obtaining the forecast data of wind energy, solar energy and load, it is divided into 6 different scenarios.
Scenario 1: When the electrical energy generated by the WT and PV can meet the demand of the load, it should then be determined whether the ess needs to be charged. When the state of charge is sufficient and charging is not required, the power output of the WT and PV is limited by abandoning the wind and the light.
Scenario 2: When the state of charge of the ess is insufficient and charging is required, it is further determined whether there is excess electrical energy for energy storage. If there is excess electrical energy, the ess is charged after meeting the load demand.
Scenario 3: If there is no excess power, the WT and PV output only need to meet the power supply of the load.
Scenario 4: If there is no excess electrical energy, the WT and PV output can only meet the load power supply. When the power generated by the WT and PV is insufficient to meet the load demand, it is necessary to determine whether the ess can be discharged to supplement the power. If ess does not have enough power to power the load, then need to start diesel generators to power the system load.
Scenario 5: If ess can supply power, it needs to further determine whether the total output of WT/PV and ess meet the load demand. If the output meets the need, then the wind, solar and energy storage system is used to supply power to the load.
Scenario 6: If the output cannot meet the load, it also needs to start diesel generators to supply power to the system load.
Optimal Sizing of Microgrid Using GWO
Grey Wolf Optimization (GWO) is a group intelligence optimization algorithm proposed by Griffith University scholar Mirjalili and others in Australia in 2014. The algorithm is an optimized search method developed by the grey wolf predator activity. It has the characteristics of strong convergence performance, few parameters, and easy implementation [
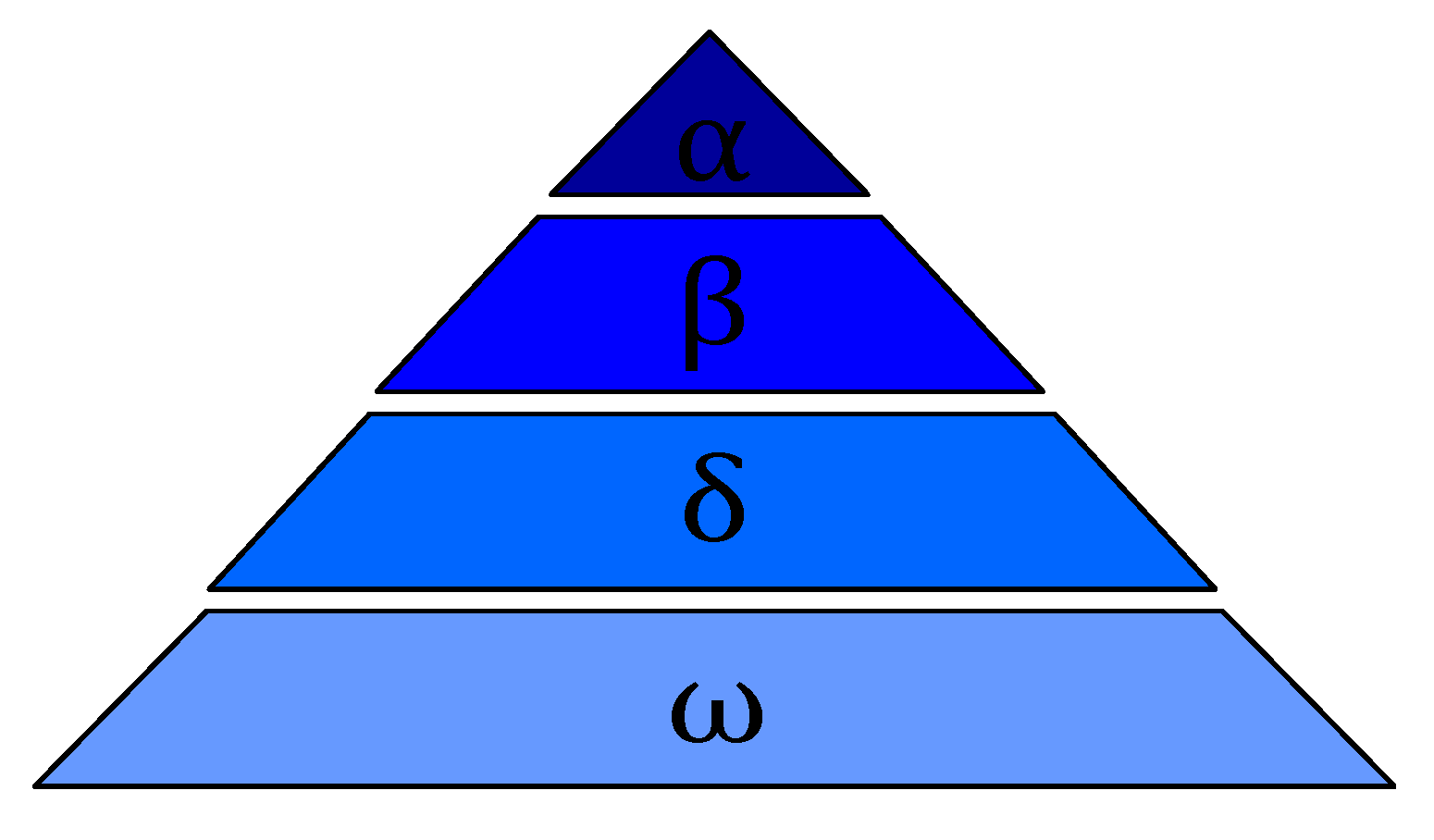
29]. Grey wolves belong to canines that live in groups and are at the top of the food chain. The grey wolf strictly observes a hierarchy of social dominance. As shown in
Figure 3.
The GWO optimization process includes five steps. The specific steps are as follows.
(a) Social Hierarchy
First, wolf pack and set the number are initialized, then the fitness value of each individual in the wolf pack are calculated. Mark the grey wolves with the top three fitness values as α, β, δ, and the remaining wolves as ω. That is to say, the social rank in the grey wolf group is ranked from high to low in order of α, β, δ, and ω. The three optimal solutions (α, β, δ) in each iteration guide the optimization process of GWO.
(b) Encircling Prey
The grey wolf will gradually approach the prey and surround it when it searches for the prey. The functional expression for this behavior is as follows [
29]:
where
t is the current number of iterations,
A and
C are the synergy coefficients; vector
Xp represents the position vector of the prey;
X(
t) represents the current grey wolf’s position vector; a linearly decreases from 2 to 0 during the entire iteration process;
r1 and
r2 are the random vector in [0, 1].
(c) Hunting
The grey wolf has the ability to identify the position of the potential prey (optimal solution). However, the solution space characteristics of many problems are unknown, and the grey wolf cannot determine the precise position of the prey.
In order to get the best optimization plan, it is assumed that α, β, δ have the ability to identify the possible location of prey to simulate the behavior of grey wolf. Therefore, keep the best three grey wolves (α, β, δ) in the current population during iterating, then update their positions according to the positions of other search agents (including ω). The mathematical model of this behavior can be expressed as follows [
29]:
where
Xα,
Xβ,
Xδ represent the position vector of α, β, δ in the current population;
X represent the position vector of the grey wolf;
Dα,
Dβ,
Dδ represent the distance between the current search agent and the best three wolves; when the |
A>1|, the gray wolf searches for prey in different areas as much as possible. When |
A<1|, grey wolves focused on searching for prey within a certain area.
(d) Attacking Prey
In the process of constructing the attacking prey model, according to (b), the decrease of a value will cause the value of to fluctuate accordingly. In other words, is a random vector in the interval [−a, a]. When is in [−1, 1] interval, the search agent’s position can be anywhere between the current grey wolf and its prey at the next moment.
(e) Search for Prey
Grey wolves mainly rely on the information of α, β, and δ to find their prey. In the process of searching for prey, keeping the search agent away from the prey can make the grey wolf perform a global search. In formula (b), the C vector composed of random values in the interval range [0, 2]. The random search behavior of grey wolves can make the optimization results more accurate and avoid falling into local optimum. C is a random value during the iteration process. This coefficient is helpful for the algorithm to jump out of the local area, especially the algorithm is particularly important in the later stage of the iteration.
After the microgrid obtains real-time information on the system status, it begins to execute the GWO. First, it sets the number of wolves and initializes the wolves, and then calculates the fitness value of each wolf. The top three are recorded as α, β, δ each wolf updates its position by calculating the distance from α, β, δ and finally outputs the global optimal solution, according to whether the maximum number of iterations is reached. Some of the previous optimization algorithms are prone to fall into the shortcomings of local optimization, slow convergence, and optimization of the microgrid. The flow chart in
Figure 4 is the microgrid dispatching process combined with the GWO.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}