
Dynamic Behavior of a Fractional-Type Fuzzy Difference System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- (1)
- is a normal fuzzy set, i.e., there exists such that ;
- (2)
- is a fuzzy convex set, i.e.,
- (3)
- is upper semicontinuous on ;
- (4)
- is compactly supported, i.e.,
- (1)
- If there exists a positive real number (or ) such that (or ), , then the sequence of positive fuzzy numbers is persistent (or bounded).
- (2)
- If there exist positive real numbers , such that , then the sequence of positive fuzzy numbers is persistent and bounded.
- (1)
- An equilibrium point is called locally stable if for any and every , there exists such that for any initial conditions , with , , we have for any .
- (2)
- An equilibrium point is called locally attractor if for any initial conditions .
- (3)
- An equilibrium point is called asymptotically stable if it is stable, and is also attractor.
- (4)
- An equilibrium point is called unstable if it is not locally stable.
- (1)
- If all eigenvalues of the Jacobian matrix about lie inside the open unit disk, i.e., , then is locally asymptotically stable.
- (2)
- If one of eigenvalues of the Jacobian matrix about has norm greater than one, then is unstable.
3. Main Results and Proofs
- (1)
- is nondecreasing and left continuous;
- (2)
- is nonincreasing and left continuous;
- (3)
- .
- (1)
- If , in view of , then all characteristic roots . Thus, according to Lemma 2, the equilibrium point is locally asymptotically stable.
- (2)
- If , in view of , then at least one root of the characteristic Equation (23) lies outside the unit disk. From Lemma 2, we have that the equilibrium point is unstable, and then the proof is completed. □
- (1)
- uniformly stable; if given , there exists a with , implies for any , such that for any the solution ;
- (2)
- uniformly attractive if there is a such that , one has ;
- (3)
- uniformly asymptotically stable if (1) and (2) hold simultaneously.
4. Numerical Example
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A




Appendix B. Matlab Calculation Codes
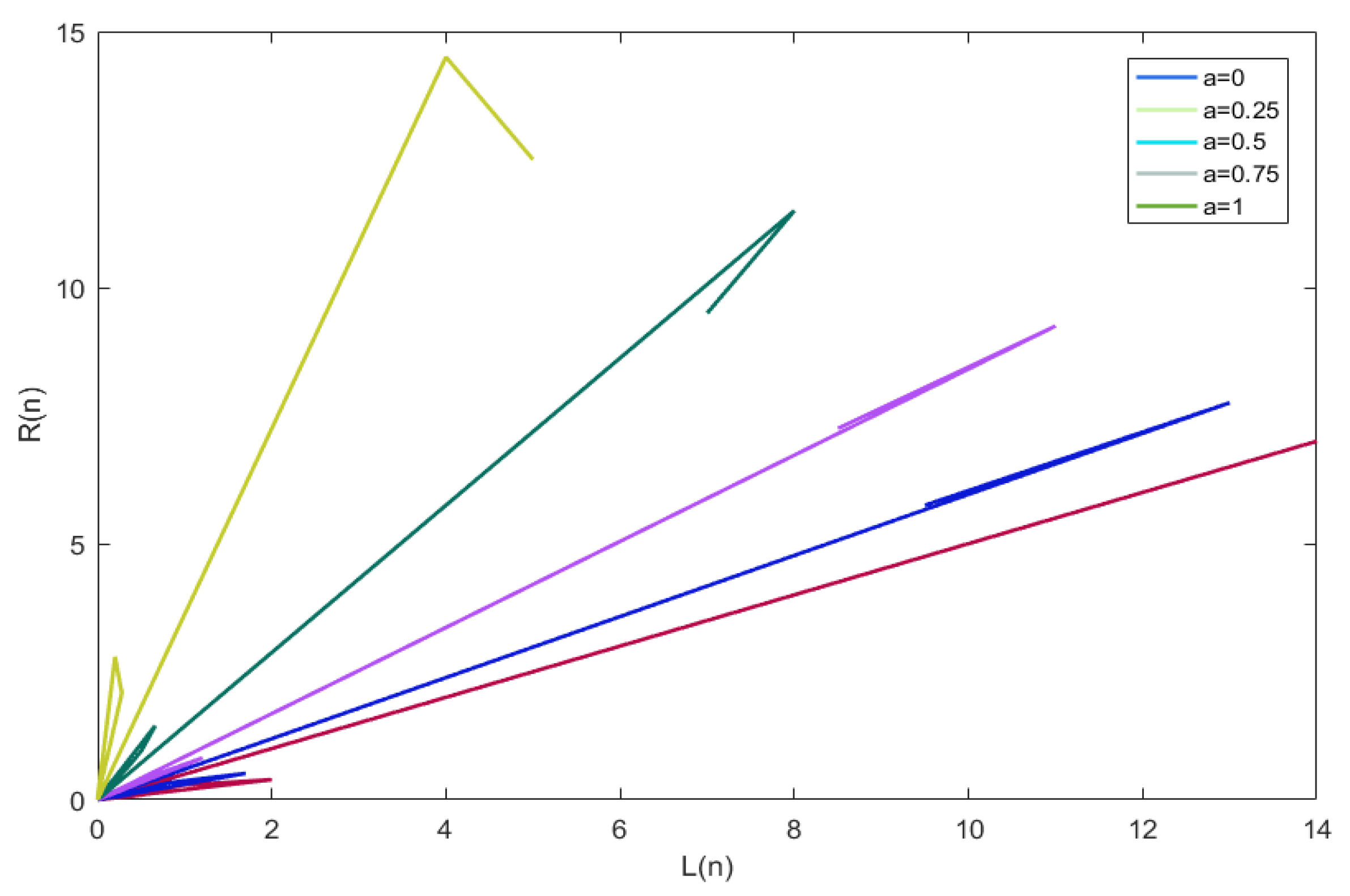
| %function x,y %syms x y %x=rand([1,104]); %y=rand([1,104]); clear all format long %syms a a1=0; for j = 1:5 a1=a1+j*(1/4)-(1/4); n=150; x=zeros(n,1); y=zeros(n,1); x(1,1)=1+2*a1; x(2,1)=3+a1; x(3,1)=2+2*a1; x(4,1)=5+3*a1; x(5,1)=7+3*a1; y(1,1)=5-2*a1; y(2,1)=5-a1; y(3,1)=6-2*a1; y(4,1)=10-2*a1; y(5,1)=14-4*a1; for i=6:30 x(i+1,1)=((3/10)*x(i-1,1)*x(i-2,1)+3*x(i-3,1))/(12+6*y(i-4,1)); y(i+1,1)=((3/10)*y(i-1,1)*y(i-2,1)+3*y(i-3,1))/(12+6*x(i-4,1)); end N=50; n=[y(4:N)]; m=[x(4:N)]; box on hold on; plot(n,m,’Color’,[rand(),rand(),rand()],’LineWidth’,1.5) end xlabel(’L(n)’) ylabel(’R(n)’) disp(a1); legend(’a=0’,’a=0.25’,’a=0.5’,’a=0.75’,’a=1’) |
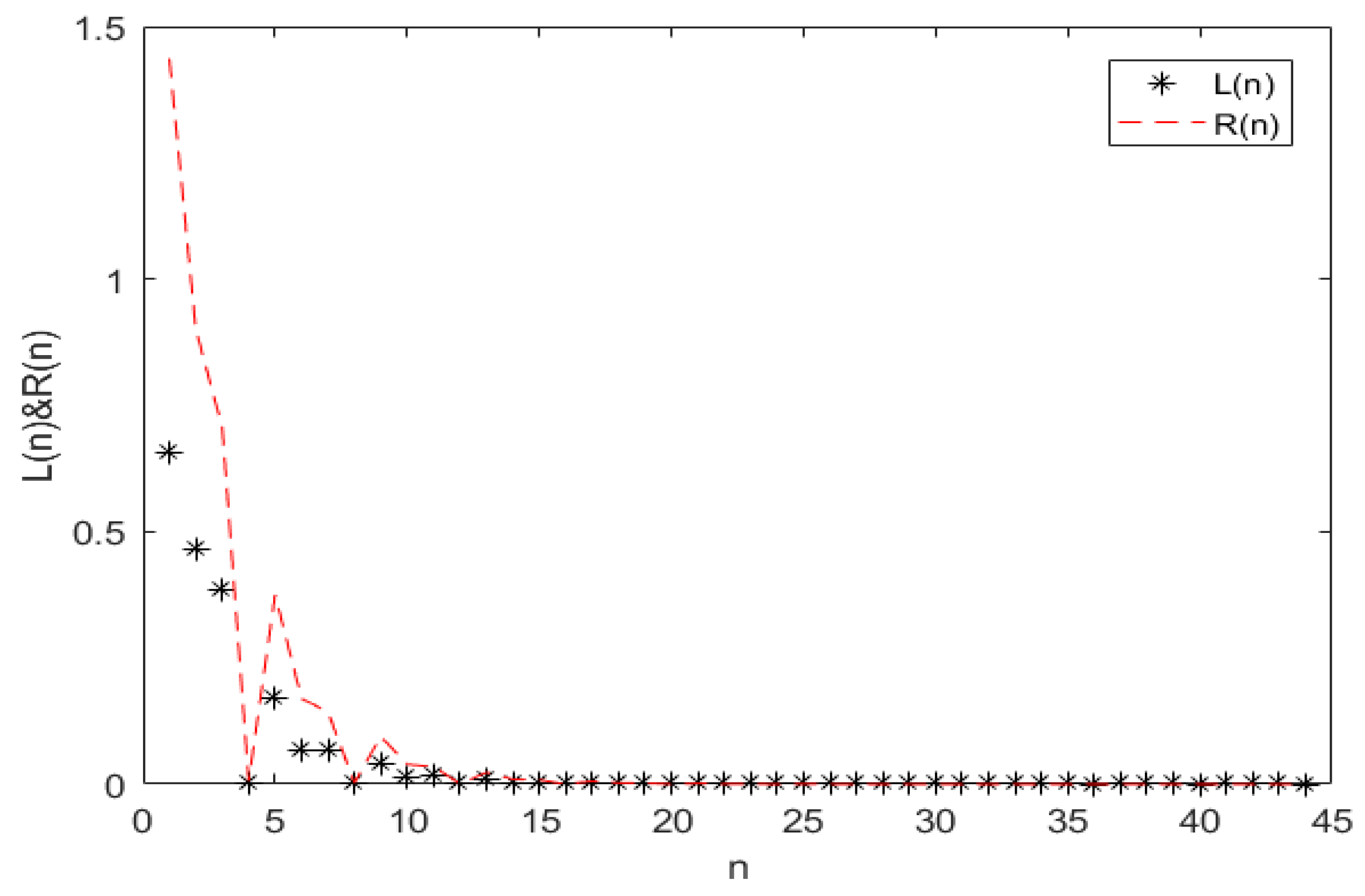
| %function x,y %syms x y %x=rand([1,104]); %y=rand([1,104]); clear all format long %syms a n=150; a1=0; x=zeros(n,1); y=zeros(n,1); x(1,1)=1+2*a1; x(2,1)=3+a1; x(3,1)=2+2*a1; x(4,1)=5+3*a1; x(5,1)=7+3*a1; y(1,1)=5-2*a1; y(2,1)=5-a1; y(3,1)=6-2*a1; y(4,1)=10-2*a1; y(5,1)=14-4*a1; for i=6:50 x(i+1,1)=((3/10)*x(i-1,1)*x(i-2,1)+3*x(i-3,1))/(12+6*y(i-4,1)); y(i+1,1)=((3/10)*y(i-1,1)*y(i-2,1)+3*y(i-3,1))/(12+6*x(i-4,1)); end m=[x(7,1),x(8,1),x(9,1),x(10,1),x(11,1),x(12,1),x(13,1),x(14,1),x(15,1),x(16,1),x(17,1),x(18,1),x(19,1),x(20,1),x(21,1),x(22,1),x(23,1),x(24,1),x(25,1),x(26,1),x(27,1),x(28,1),x(29,1),x(30,1),x(31,1),x(32,1),x(33,1),x(34,1),x(35,1),x(36,1),x(37,1),x(38,1),x(39,1),x(40,1),x(41,1),x(42,1),x(43,1),x(44,1),x(45,1),x(46,1),x(47,1),x(48,1),x(49,1),x(50,1)] n=[y(7,1),y(8,1),y(9,1),y(10,1),y(11,1),y(12,1),y(13,1),y(14,1),y(15,1),y(16,1),y(17,1),y(18,1),y(19,1),y(20,1),y(21,1),y(22,1),y(23,1),y(24,1),y(25,1),y(26,1),y(27,1),y(28,1),y(29,1),y(30,1),y(31,1),y(32,1),y(33,1),y(34,1),y(35,1),y(36,1),y(37,1),y(38,1),y(39,1),y(40,1),y(41,1),y(42,1),y(43,1),y(44,1),y(45,1),y(46,1),y(47,1),y(48,1),y(49,1),y(50,1)] hold on; plot(m,’k*’) plot(n,’r--’) box on %grid on xlabel(’n’) ylabel(’L(n)&R(n)’) legend(’L(n)’,’R(n)’) |
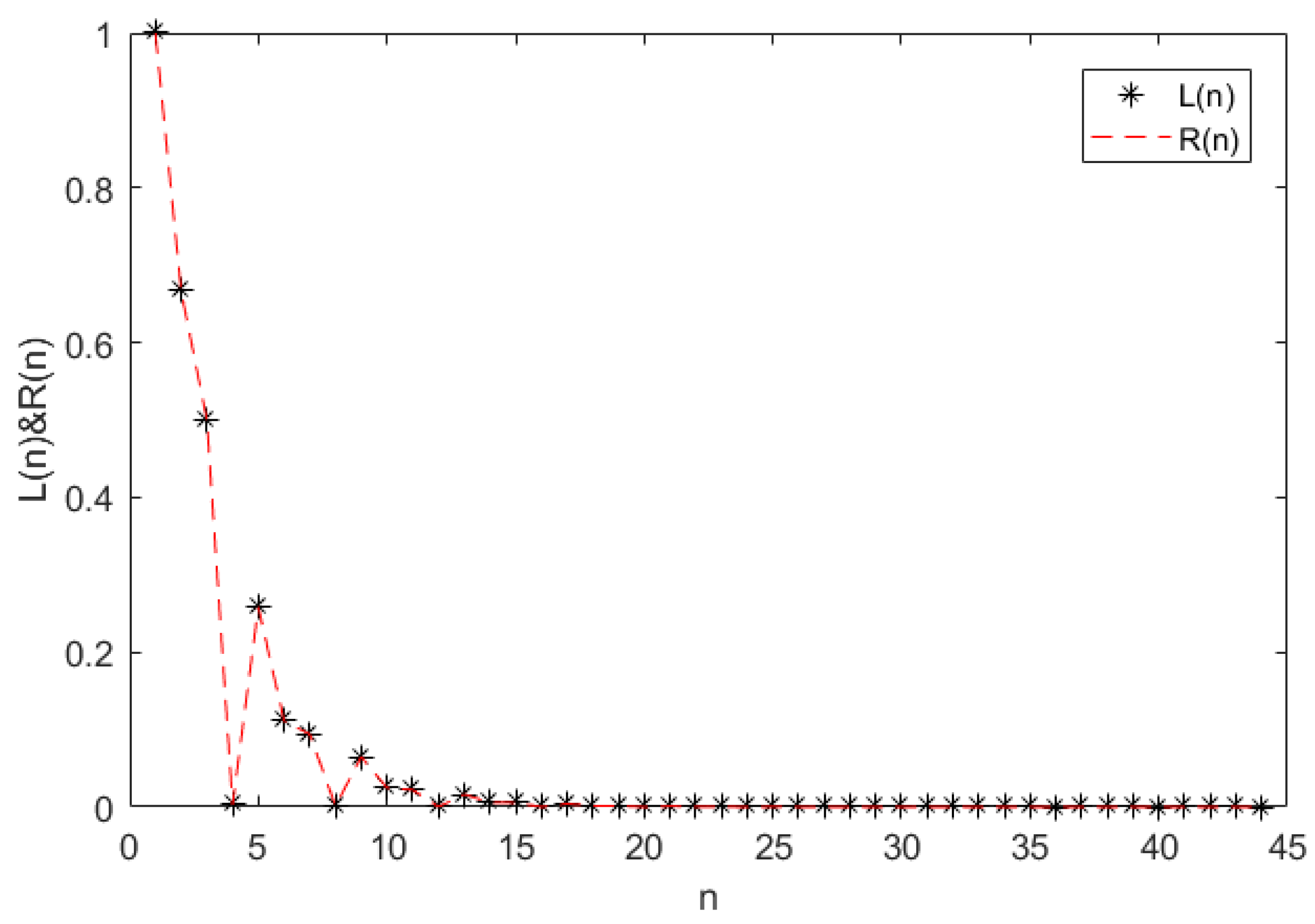
| %function x,y %syms x y %x=rand([1,104]); %y=rand([1,104]); clear all format long %syms a n=150; a1=0.5; x=zeros(n,1); y=zeros(n,1); x(1,1)=1+2*a1; x(2,1)=3+a1; x(3,1)=2+2*a1; x(4,1)=5+3*a1; x(5,1)=7+3*a1; y(1,1)=5-2*a1; y(2,1)=5-a1; y(3,1)=6-2*a1; y(4,1)=10-2*a1; y(5,1)=14-4*a1; for i=6:50 x(i+1,1)=((3/10)*x(i-1,1)*x(i-2,1)+3*x(i-3,1))/(12+6*y(i-4,1)); y(i+1,1)=((3/10)*y(i-1,1)*y(i-2,1)+3*y(i-3,1))/(12+6*x(i-4,1)); end m=[x(7,1),x(8,1),x(9,1),x(10,1),x(11,1),x(12,1),x(13,1),x(14,1),x(15,1),x(16,1),x(17,1),x(18,1),x(19,1),x(20,1),x(21,1),x(22,1),x(23,1),x(24,1),x(25,1),x(26,1),x(27,1),x(28,1),x(29,1),x(30,1),x(31,1),x(32,1),x(33,1),x(34,1),x(35,1),x(36,1),x(37,1),x(38,1),x(39,1),x(40,1),x(41,1),x(42,1),x(43,1),x(44,1),x(45,1),x(46,1),x(47,1),x(48,1),x(49,1),x(50,1)] n=[y(7,1),y(8,1),y(9,1),y(10,1),y(11,1),y(12,1),y(13,1),y(14,1),y(15,1),y(16,1),y(17,1),y(18,1),y(19,1),y(20,1),y(21,1),y(22,1),y(23,1),y(24,1),y(25,1),y(26,1),y(27,1),y(28,1),y(29,1),y(30,1),y(31,1),y(32,1),y(33,1),y(34,1),y(35,1),y(36,1),y(37,1),y(38,1),y(39,1),y(40,1),y(41,1),y(42,1),y(43,1),y(44,1),y(45,1),y(46,1),y(47,1),y(48,1),y(49,1),y(50,1)] hold on; plot(m,’k*’) plot(n,’r--’) box on %grid on xlabel(’n’) ylabel(’L(n)&R(n)’) legend(’L(n)’,’R(n)’) |
| %function x,y %syms x y %x=rand([1,104]); %y=rand([1,104]); clear all format long %syms a n=150; a1=1; x=zeros(n,1); y=zeros(n,1); x(1,1)=1+2*a1; x(2,1)=3+a1; x(3,1)=2+2*a1; x(4,1)=5+3*a1; x(5,1)=7+3*a1; y(1,1)=5-2*a1; y(2,1)=5-a1; y(3,1)=6-2*a1; y(4,1)=10-2*a1; y(5,1)=14-4*a1; for i=6:50 x(i+1,1)=((3/10)*x(i-1,1)*x(i-2,1)+3*x(i-3,1))/(12+6*y(i-4,1)); y(i+1,1)=((3/10)*y(i-1,1)*y(i-2,1)+3*y(i-3,1))/(12+6*x(i-4,1)); end m=[x(7,1),x(8,1),x(9,1),x(10,1),x(11,1),x(12,1),x(13,1),x(14,1),x(15,1),x(16,1),x(17,1),x(18,1),x(19,1),x(20,1),x(21,1),x(22,1),x(23,1),x(24,1),x(25,1),x(26,1),x(27,1),x(28,1),x(29,1),x(30,1),x(31,1),x(32,1),x(33,1),x(34,1),x(35,1),x(36,1),x(37,1),x(38,1),x(39,1),x(40,1),x(41,1),x(42,1),x(43,1),x(44,1),x(45,1),x(46,1),x(47,1),x(48,1),x(49,1),x(50,1)] n=[y(7,1),y(8,1),y(9,1),y(10,1),y(11,1),y(12,1),y(13,1),y(14,1),y(15,1),y(16,1),y(17,1),y(18,1),y(19,1),y(20,1),y(21,1),y(22,1),y(23,1),y(24,1),y(25,1),y(26,1),y(27,1),y(28,1),y(29,1),y(30,1),y(31,1),y(32,1),y(33,1),y(34,1),y(35,1),y(36,1),y(37,1),y(38,1),y(39,1),y(40,1),y(41,1),y(42,1),y(43,1),y(44,1),y(45,1),y(46,1),y(47,1),y(48,1),y(49,1),y(50,1)] hold on; plot(m,’k*’) plot(n,’r--’) box on %grid on xlabel(’n’) ylabel(’L(n)&R(n)’) legend(’L(n)’,’R(n)’) |
References
- Liao, Y.Z. Dynamics of two-species harvesting model of almost periodic facultative mutualism with discrete and distributed delays. Eng. Lett. 2018, 26, 7–13. [Google Scholar]
- Yang, X.S.; Cao, J.D. Adaptive pinning synchronization of coupled neural networks with mixed delays and vector-form stochastic perturbations. Acta Math. Sci. 2012, 32B, 955–997. [Google Scholar]
- Li, X.J.; Lu, S.P. Periodic solutions for a kind of high-order p-Laplacian differential equation with sign-changing coefficient ahead of the non-linear term. Nonlinear Anal.-Theory Methods Appl. 2009, 70, 1011–1022. [Google Scholar] [CrossRef]
- Apalara, T.A. Uniform decay in weakly dissipative timoshenko system with internal distributed delay feedbacks. Acta Math. Sci. 2016, 36B, 815–830. [Google Scholar] [CrossRef]
- Jia, X.J.; Jia, R.A. Improve efficiency of biogas feedback supply chain in rural China. Acta Math. Sci. 2017, 37B, 768–785. [Google Scholar] [CrossRef]
- Boukhatem, Y.; Benabderrahmane, B. General decay for a viscoelastic equation of variable coefficients with a time-varying delay in the boundary feedback and acoustic boundary conditions. Acta Math. Sci. 2017, 37B, 1453–1471. [Google Scholar] [CrossRef]
- Zhao, Z.H.; Li, Y.; Feng, Z.S. Traveling wave phenomena in a nonlocal dispersal predator-prey system with the Beddington-DeAngelis functional response and harvesting. Bound. Value Probl. Math. Biosci. Eng. 2021, 18, 1629–1652. [Google Scholar] [CrossRef]
- Shi, Q.H.; Zhang, X.B.; Wang, C.Y.; Wang, S. Finite time Blowup for Klein-Gordon- Schrodinger System. Math. Methods Appl. Sci. 2019, 42, 3929–3941. [Google Scholar] [CrossRef]
- Wu, Q.; Pan, C.H.; Wang, H.Y. Speed determinacy of the traveling waves for a three species time-periodic Lotka-Volterra competition system. Math. Methods Appl. Sci. 2022, 45, 6080–6095. [Google Scholar] [CrossRef]
- Elsayed, E.M.; Harikrishnan, S.; Kanagarajan, K. On the Existence and Stability of Boundary Value Problem for Differential Equation with Hilfer-Katugampola Fractional Derivative. Acta Math. Sci. 2019, 39B, 1568–1578. [Google Scholar] [CrossRef]
- Zheng, B.B.; Hu, C.; Yu, J.; Jiang, H.J. Synchronization analysis for delayed spatio-temporal neural networks with fractional-order. Neurocomputing 2021, 441, 226–236. [Google Scholar] [CrossRef]
- Stević, S. Global stability and asymptotics of some classes of rational difference equations. J. Math. Anal. Appl. 2006, 316, 60–68. [Google Scholar] [CrossRef] [Green Version]
- Muroya, Y.; Ishiwata, E.; Guglielmi, N. Global stability for nonlinear difference equations with variable coefficients. J. Math. Anal. Appl. 2007, 334, 232–247. [Google Scholar] [CrossRef] [Green Version]
- Hu, L.X.; Xia, H.M. Global asymptotic stability of a second order rational difference equation. Appl. Math. Comput. 2014, 233, 377–382. [Google Scholar] [CrossRef]
- Haddad, N.; Touafek, N.; Rabago, J.F.T. Well-defined solutions of a system of difference equations. J. Appl. Math. Comput. 2018, 56, 439–458. [Google Scholar] [CrossRef]
- Agarwal, R.P.; Li, W.T.; Pang, P.Y.H. Asymptotic behavior of a class of nolinear delay difference equations. J. Differ. Equ. Appl. 2002, 8, 719–728. [Google Scholar] [CrossRef]
- Pielou, E.C. Population and Community Ecology: Principles and Methods; Gordon and Breach: London, UK, 1975. [Google Scholar]
- Popov, E.P. Automatic Regulation and Control; Nauka: Moscow, Russia, 1966. (In Russian) [Google Scholar]
- Elabbasy, E.M.; Elsayed, E.M. Dynamics of a rational difference equation. Chin. Ann. Math. 2009, 30B, 187–198. [Google Scholar] [CrossRef]
- Elsayed, E.M. On the solutions and periodic nature of some systems of difference equations. Int. J. Biomath. 2014, 7, 1450067. [Google Scholar] [CrossRef]
- Elsayed, E.M. Expression and behavior of the solutions of some rational recursive sequences. Math. Methods Appl. Sci. 2016, 39, 5682–5694. [Google Scholar] [CrossRef]
- Huo, H.; Li, W. Stable periodic solution of the discrete periodic Leslie-Gower predator-prey model. Math. Comput. Model. 2004, 40, 261–269. [Google Scholar] [CrossRef]
- Anderson, D.R. Global stability for nonlinear dynamic equations with variable coefficients. J. Math. Anal. Appl. 2008, 345, 796–804. [Google Scholar] [CrossRef] [Green Version]
- Galewski, M. A note on the existence of a bounded solution for a nonlinear system of difference equations. J. Differ. Equ. Appl. 2010, 16, 121–124. [Google Scholar] [CrossRef]
- Chen, Y.H.; Yang, B.; Meng, Q.F.; Zhao, Y.; Abraham, A. Time-series forecasting using a system of ordinary differential equations. Inf. Sci. 2011, 181, 106–114. [Google Scholar] [CrossRef]
- Elsayed, E.M. Behavior and expression of the solutions of some rational difference equations. J. Comput. Anal. Appl. 2013, 15, 73–81. [Google Scholar]
- Elsayed, E.M. Solutions of rational difference systems of order two. Math. Comput. Model. 2012, 55, 378–384. [Google Scholar] [CrossRef]
- Elsayed, E.M. Solution for systems of difference equations of rational form of order two. Comput. Appl. Math. 2014, 33, 751–765. [Google Scholar] [CrossRef]
- Li, W.T.; Sun, H.R. Dynamics of a rational difference equation. Appl. Math. Comput. 2005, 163, 577–591. [Google Scholar] [CrossRef]
- Saleh, M.; Abu-Baha, S. Dynamics of a higher order rational difference equation. Appl. Math. Comput. 2006, 181, 84–102. [Google Scholar] [CrossRef]
- Dehghan, M.; Mazrooei-Sebdani, R. Dynamics of a higher-order rational difference equation. Appl. Math. Comput. 2006, 178, 345–354. [Google Scholar] [CrossRef]
- Zayed, E.M.E.; El-Moneam, M.A. On the global asymptotic stability for a rational recursive sequence. Iran. J. Sci. Technol. Trans. A Sci. 2012, 35, 333–339. [Google Scholar]
- Chrysafifis, K.A.; Papadopoulos, B.K.; Papaschinopoulos, G. On the fuzzy difference equations of finance. Fuzzy Sets Syst. 2008, 159, 3259–3270. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Liu, J.; Luo, Z. Dynamical behavior of a third-order rational fuzzy difference equation. Adv. Differ. Equ. 2015, 2015, 108. [Google Scholar] [CrossRef] [Green Version]
- Hatir, E.; Mansour, T.; Yalcinkaya, I. On a fuzzy difference equation. Util. Math. 2014, 93, 135–151. [Google Scholar]
- Khastan, A. Fuzzy logistic difference equation. Iran. J. Fuzzy Syst. 2018, 15, 55–66. [Google Scholar]
- Papaschinopoulos, G.; Stefanidou, G. Boundedness and asymptotic behaviour of the solutions of a fuzzy difference equation. Fuzzy Sets Syst. 2003, 140, 523–539. [Google Scholar] [CrossRef]
- Khastan, A. New solutions for first order linear fuzzy difference equations. J. Comput. Appl. Math. 2017, 312, 156–166. [Google Scholar] [CrossRef]
- Allahviranloo, T.; Salahshour, S.; Khezerloo, M. Maximal-and minimal symmetric solutions of fully fuzzy linear systems. J. Comput. Appl. Math. 2011, 235, 4652–4662. [Google Scholar] [CrossRef] [Green Version]
- Kocic, V.L.; Ladas, G. Global Behavior of Nonlinear Difference Equations of Higher Order with Applications; Kluwer Academic: Dordrecht, The Netherlands, 1993. [Google Scholar]
- Kulenovic, M.R.S.; Ladas, G. Dynamic of Second-Order Rational Difference Equations: With Open Problems and Conjectures; Chapman & Hall CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Camouzis, E.; Ladas, G. Dynamics of Third-Order Rational Difference Equations: With Open Problems and Conjectures; Chapman and Hall/CRC: Boca Raton, FL, USA, 2007. [Google Scholar]
- Deeba, E.Y.; De Korvin, A.; Koh, E.L. A fuzzy difference equation with an application. J. Differ. Equ. Appl. 1996, 2, 365–374. [Google Scholar] [CrossRef]
- Deeba, E.Y.; De Korvin, A. Analysis by fuzzy difference equations of a model of CO2 level in the blood. Appl. Math. Lett. 1999, 12, 33–40. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.H.; Yag, L.; Liao, D. Behavior of solutions to a fuzzy nonlinear difference equation. Iran. J. Fuzzy Syst. 2012, 9, 1–12. [Google Scholar]
- Zhang, Q.H.; Yang, L.; Liao, D. On first order fuzzy Ricatti difference equation. Inf. Sci. 2014, 270, 226–236. [Google Scholar] [CrossRef]
- Wang, C.Y.; Su, X.L.; Liu, P.; Hu, X.H.; Li, R. On the dynamics of a five-order fuzzy difference equation. J. Nonlinear Sci. Appl. 2017, 10, 3303–3319. [Google Scholar] [CrossRef] [Green Version]
- Khastan, A.; Alijani, Z. On the new solutions to the fuzzy difference equation xn+1=A+B/xn. Fuzzy Sets Syst. 2019, 358, 64–83. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Lin, F.; Zhong, X. On discrete time Beverton-Holt population model with fuzzy environment. Math. Biosci. Eng. 2019, 16, 1471–1488. [Google Scholar] [CrossRef]
- Bede, B. Mathematics of Fuzzy Sets and Fuzzy Logic; Springer: London, UK, 2013. [Google Scholar]
- Diamond, P.; Kloeden, P. Metric Spaces of Fuzzy Sets; World Scientific: Singapore, 1994. [Google Scholar]
- Sedaghat, H. Nonlinear Difference Equations: Theory with Applications to Social Science Models; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2003. [Google Scholar]
- Zhang, Q.H.; Lin, F. On dynamical behaviour of discrete time fuzzy logistic equation. Discret. Dyn. Nat. Soc. 2018, 2018, 8742397. [Google Scholar]
- Papaschinopoulos, G.; Papadopoulos, B.K. On the fuzzy difference equation xn+1=A+xn/xn−m. Fuzzy Sets Syst. 2002, 129, 73–81. [Google Scholar] [CrossRef]
- Wu, C.X.; Zhang, B.K. Embedding problem of noncompact fuzzy number space Ẽ(I). Fuzzy Sets Syst. 1999, 105, 165–169. [Google Scholar] [CrossRef]
- Lakshmikantham, V.; Vatsala, A.S. Basic theory of fuzzy difference equations. J. Differ. Equ. Appl. 2002, 8, 957–968. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, L.; Wang, C.; Zhao, X.; Wei, W. Dynamic Behavior of a Fractional-Type Fuzzy Difference System. Symmetry 2022, 14, 1337. https://doi.org/10.3390/sym14071337
Jia L, Wang C, Zhao X, Wei W. Dynamic Behavior of a Fractional-Type Fuzzy Difference System. Symmetry. 2022; 14(7):1337. https://doi.org/10.3390/sym14071337
Chicago/Turabian StyleJia, Lili, Changyou Wang, Xiaojuan Zhao, and Wei Wei. 2022. "Dynamic Behavior of a Fractional-Type Fuzzy Difference System" Symmetry 14, no. 7: 1337. https://doi.org/10.3390/sym14071337
APA StyleJia, L., Wang, C., Zhao, X., & Wei, W. (2022). Dynamic Behavior of a Fractional-Type Fuzzy Difference System. Symmetry, 14(7), 1337. https://doi.org/10.3390/sym14071337