
Research on Path Planning in 3D Complex Environments Based on Improved Ant Colony Algorithm


Abstract
:1. Introduction
2. Model Establishment
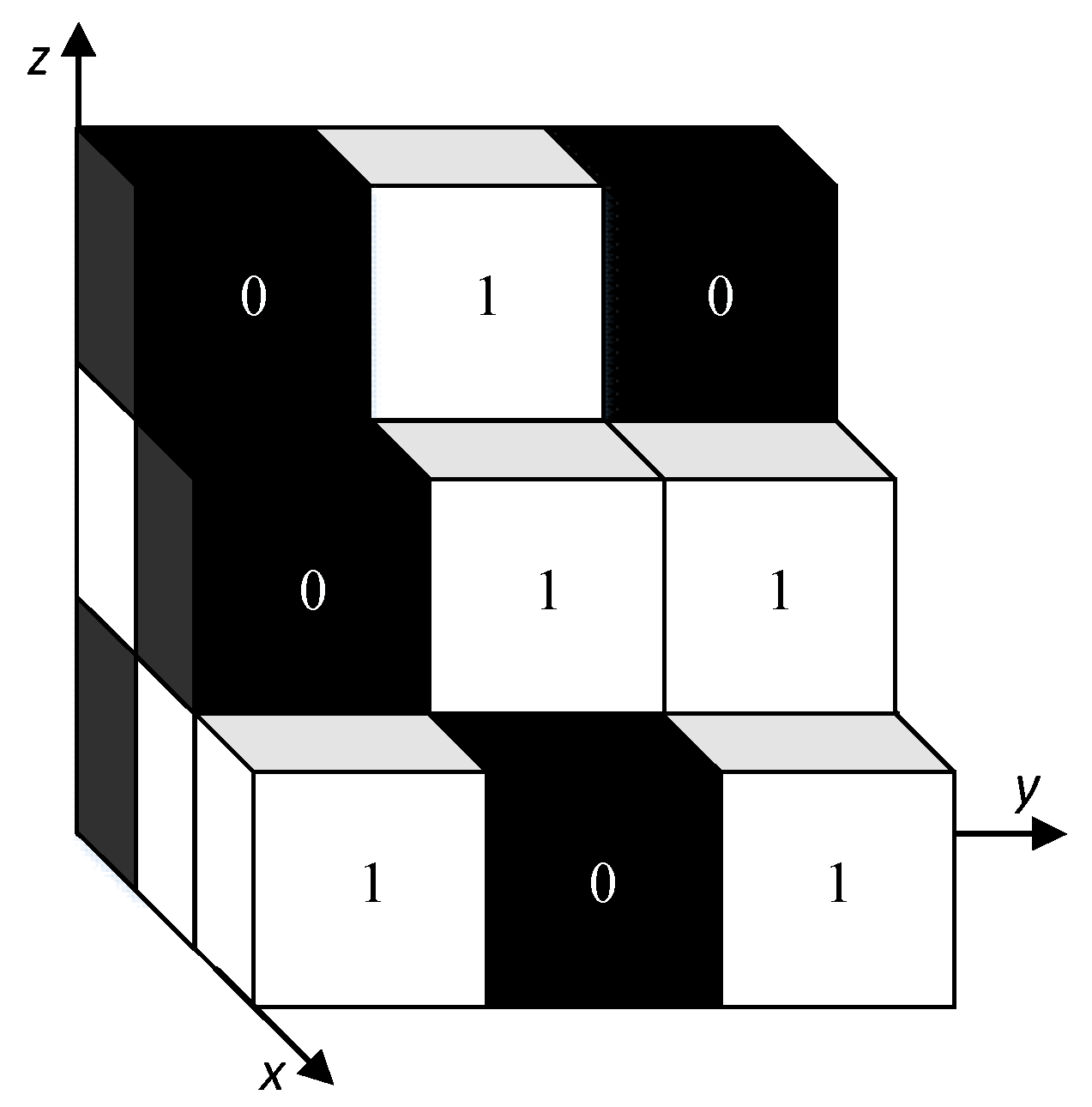
2.1. Flight Environment Model
2.2. Path Planning Model
2.2.1. Objective Function
2.2.2. Constraints
3. Improved Ant Colony Algorithm
3.1. Ant Colony Algorithm
3.2. Improvement Heuristic Function
3.3. Anti-Deadlock Path
3.4. Improvement Pheromone Update
3.5. Improvement Algorithm Flow
4. Simulation Experiments and Analysis
4.1. Parameter Settings
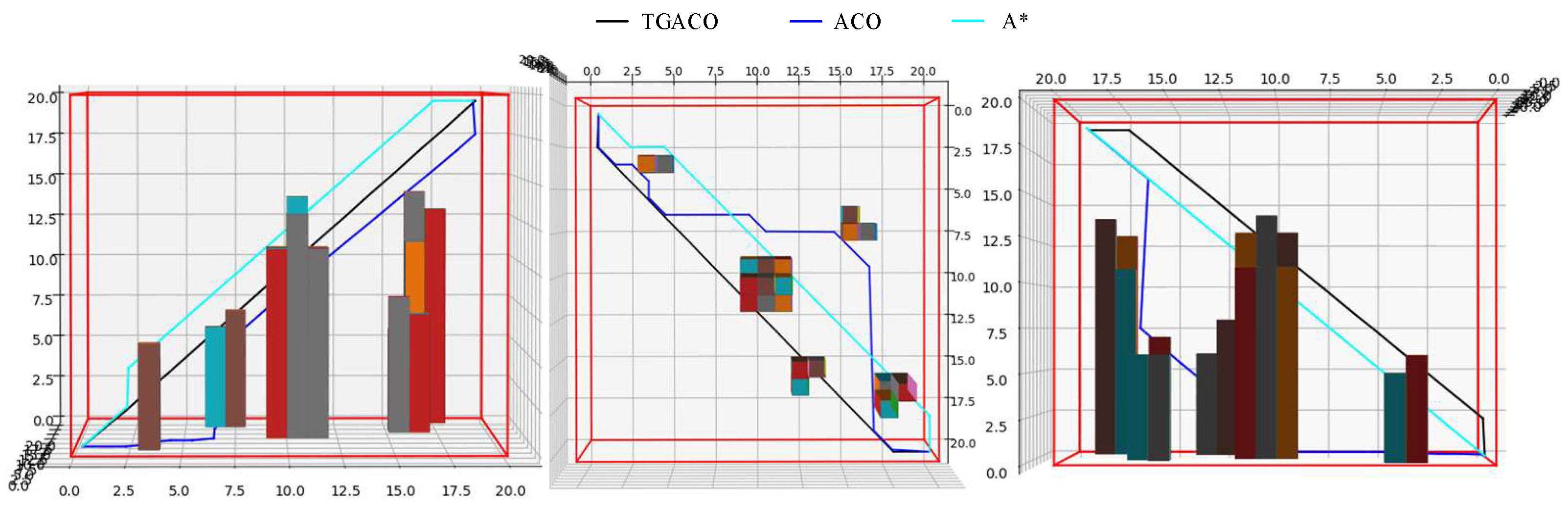
4.2. Algorithm Comparison Experiment
- (1)
- The Grid environment
- (2)
- The Grid environment
- (3)
- The Grid environment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, D.; Li, R. Research on Swarms Cooperative Path Planning Method Based on Intelligent Optimization Algorithm. Tactical Missile Technol. 2020, 103, 17–29. [Google Scholar]
- Wu, P.; Li, T.; Cao, G.; Song, G. UCAV path planning based on improved chaotic bee colony algorithm. China Sci. Pap. 2021, 16, 301–306. [Google Scholar]
- Shi, H.; Tian, C.; Ren, Y.; Jia, F. Route Planning of Small Fixed-wing UAV Based on Sparse A* Algorithm. Ordnance Ind. Autom. 2021, 40, 14–18, 39. [Google Scholar]
- Han, Y.; Li, S. UAV Path Planning Based on Improved Artificial Potential Field. Systems Engineering and Electronics. 2021. Available online: https://kns.cnki.net/kcms/detail/11.2422.TN.20210531.1117.014.html (accessed on 10 March 2022).
- Wenbin, B. Route Planning Algorithm for Fixed-Wing UAV. Master’s Thesis, Harbin Engineering University, Harbin, China, 2019. [Google Scholar]
- Jia, G. Research on Three-Dimensional Path Planning of UAV Based on Genetic Algorithm and Sparse A* Algorithm. Master’s Thesis, Nanjing University of Posts and Telecommunications, Nanjing, China, 2017. [Google Scholar]
- Miao, C.; Chen, G.; Yan, C.; Wu, Y. Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm. Comput. Ind. Eng. 2021, 156, 1–10. [Google Scholar] [CrossRef]
- Gao, Y. UAV Task Planning Based on Intelligent Optimal Algorithms. Master’s Thesis, Nanjing University of Posts and Telecommunications, Nanjing, China, 2019. [Google Scholar]
- Junyi, Z. Research on Coordinated Attack Strategy of Multi-Loitering Ammunition Based on Intelligent Algorithm. Master’s Thesis, North University of China, Taiyuan, China, 2020. [Google Scholar]
- Qing, W.; Haiming, X.; Pin, L.Y.U.; Rui, J.; Dongdong, M. Research on path planning of multi-rotor UAV based on improved ant colony algorithm. J. Hefei Univ. Technol. (Nat. Sci.) 2021, 44, 1172–1178. [Google Scholar]
- Gu, J.J.; Cao, Q.X. Path planning for mobile robot in a 2.5-dimensional grid-based map. Industrial Robot. Int. J. 2011, 38, 315–321. [Google Scholar]
- Weinan, W. Research on Modeling and Method for Cooperative Combat Task Planning of Multiple Cruise Flight Missiles. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2013. [Google Scholar]
- Qiong, W.; Meiwan, L.; Weijian, R.; Tianren, W. Overview of Common Algorithms for UAV Path Planning. J. Jilin Univ. (Inf. Sci. Ed.) 2019, 37, 58–67. [Google Scholar]
- Kaili, X.; Haitao, Y.; Haiping, X. Research Status of Intelligent Track Planning Algorithm. J. Ordnance Equip. Eng. 2020, 41, 8–13, 34. [Google Scholar]
- Shahid, N.; Abrar, M.; Ajmal, U.; Masroor, R.; Amjad, S.; Jeelani, M. Path planning in unmanned aerial vehicles: An optimistic overview. Int. J. Commun. Syst. 2022, 35, e5090. [Google Scholar] [CrossRef]
- Wenzhen, L.; Fukang, L.; Zongyan, C.; Jia, Y.; Xinkun, Y.; Ningning, Z. Mobile Robot Path Planning Using An improved Ant Colony Algorithm. Modul. Mach. Tool Autom. Manuf. Tech. 2021, 15, 49–52. [Google Scholar]
- Liu, J.; Anavatti, S.; Garratt, M.; Abbass, H.A. Modified continuous Ant Colony Optimisation for multiple Unmanned Ground Vehicle path planning. Expert Syst. Appl. 2022, 196, 116605. [Google Scholar] [CrossRef]
- Dai, X.; Long, S.; Zhang, Z.; Gong, D. Mobile Robot Path Planning Based on Ant Colony Algorithm with A* Heuristic Method. Front. Neurorobot. 2019, 13, 15. [Google Scholar] [CrossRef] [PubMed]
- Tian, W.; Yang, Z. A Grid-Map-Oriented UAV Flight Path Planning Algorithm Based on ACO Algorithm. Commun. Signal Processing Syst. Lect. Notes Electr. Eng. 2020, 516, 1206–1216. [Google Scholar]
- Zhao, H.; Nie, Z.; Zhou, F.; Lu, S. A Compound Path Planning Algorithm for Mobile Robots. In Proceedings of the 2021 IEEE International Conference on Power Electronics, Computer Applications (ICPECA), Shenyang, China, 22–24 January 2021. [Google Scholar]
- Li, J.; Xiong, Y.; She, J. An improved ant colony optimization for path planning with multiple UAVs. In Proceedings of the 2021 IEEE International Conference on Mechatronics (ICM), Kashiwa, Japan, 7–9 March 2021. [Google Scholar]
- Blum, C.; Dorigo, M. The hyper-cube framework for ant colony optimization. IEEE Trans. Syst. Man Cybern. Part B 2004, 34, 1161–1172. [Google Scholar] [CrossRef] [PubMed]
- Xiangyang, D.; Limin, Z.; Wei, F.; Miao, T. Robot Path Planning Based on Bidirectional Aggregation Ant Colony Optimization. J. Syst. Simul. 2021, 34, 1101. Available online: https://kns.cnki.net/kcms/detail/11.3092.v.20210420.1808.002.html (accessed on 18 November 2021).
- Fulong, Y.; Jianping, Z. Optimal path planning of mobile robot based on improved ant colony algorithm. Mod. Manuf. Eng. 2021, 65, 38–47. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Parameter Settings and Experimental Results | ||||
|---|---|---|---|---|---|
| α | 1 | 2 | 3 | 4 | 5 |
| Mean path length | 35.25 | 36.13 | 36.34 | 36.68 | 36.82 |
| β | 1 | 3 | 5 | 7 | 9 |
| Mean path length | 42.55 | 36.83 | 35.87 | 34.81 | 34.01 |
| ρ | 0.2 | 0.4 | 0.5 | 0.6 | 0.8 |
| Mean path length | 34.84 | 34.97 | 35.43 | 35.33 | 36.13 |
| Functions | Total Distance Mean | Total Angle Mean | Average Number of UAV Attitude Changes |
|---|---|---|---|
| Optimal path distance | 33.81 | 376.5 | 12 |
| Optimal path comprehensive | 33.85 | 256.5 | 8 |
| Algorithms | Total Distance | Total Angle | Attitude Change Times | Running Time(s) |
|---|---|---|---|---|
| TGACO | 33.7 | 135 | 4 | 0.798 |
| ACO | 41.0 | 625 | 8 | 17.099 |
| A* | 33.7 | 190 | 6 | 1.285 |
| Algorithms | Total Distance | Total Angle | Attitude Change Times | Running Time(s) |
|---|---|---|---|---|
| TGACO | 50.8 | 280 | 9 | 2.262 |
| ACO | 64.9 | 735 | 22 | 224.262 |
| A* | 50.7 | 190 | 6 | 12.282 |
| Algorithms | Total Distance | Total Angle | Attitude Change Times | Running Time(s) |
|---|---|---|---|---|
| TGACO | 183.2 | 3075 | 98 | 16.701 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, H.; Jiang, Z.; Xue, Y.; Li, W.; Cai, F.; Li, Y. Research on Path Planning in 3D Complex Environments Based on Improved Ant Colony Algorithm. Symmetry 2022, 14, 1917. https://doi.org/10.3390/sym14091917
Zhou H, Jiang Z, Xue Y, Li W, Cai F, Li Y. Research on Path Planning in 3D Complex Environments Based on Improved Ant Colony Algorithm. Symmetry. 2022; 14(9):1917. https://doi.org/10.3390/sym14091917
Chicago/Turabian StyleZhou, Hang, Ziqi Jiang, Yuting Xue, Weicong Li, Fanger Cai, and Yunchen Li. 2022. "Research on Path Planning in 3D Complex Environments Based on Improved Ant Colony Algorithm" Symmetry 14, no. 9: 1917. https://doi.org/10.3390/sym14091917
APA StyleZhou, H., Jiang, Z., Xue, Y., Li, W., Cai, F., & Li, Y. (2022). Research on Path Planning in 3D Complex Environments Based on Improved Ant Colony Algorithm. Symmetry, 14(9), 1917. https://doi.org/10.3390/sym14091917