1. Introduction
The Compact Muon Solenoid (CMS) multi-purpose detector [
1] at the Large Hardon Collider (LHC) [
2] registers the charged and neutral particles created during proton–proton collisions at a center-of-mass energy of 13.6 TeV. The detector includes a wide-aperture superconducting thin solenoid coil [
3] with a diameter of 6 m, a length of 12.5 m, and a central magnetic flux density
B0 of 3.81 T created by an operational direct current of 18.164 kA. Inside the superconducting coil around the interaction point of proton beams the major particle subdetectors are located: a silicon pixel and strip tracking detectors for registering charged particles; a solid crystal electromagnetic calorimeter for registering electrons, positrons, and gamma rays; and barrel and endcap hadronic calorimeters of total absorption for registering the energy of all the hadron particles. Outside the solenoid coil, the muon spectrometer chambers register muon particles escaping the calorimeters.
For the next run of the LHC a High-Luminosity (HL) operational phase is scheduled to be implemented after a long shutdown of the machine. The plan is to level the instantaneous luminosity at 5 × 1034 cm−2 s−1 with the goal of integrating some 3000 fb−1 by the mid-2030s. The HL-LHC will integrate ten times more luminosity than the LHC, posing significant challenges regarding radiation tolerance and event pileup on detectors, especially for calorimetry in the forward region.
To ensure optimal operation in the high pileup and high radiation environment of the HL-LHC, the existing CMS plastic scintillator-based hadron endcap calorimeter will be replaced by a new high granularity calorimeter (HGCal) containing silicon sensors and plastic scintillators as active materials and stainless-steel absorber plates in the hadronic compartments [
4]. At each endcap, these slightly magnetic stainless-steel plates occupy a volume of about 21 m
3. Assuming they are to be produced with a relative permeability
µrel well below 1.05, they will nevertheless attract under a magnetic field of 3.81 T to the center of the CMS superconducting solenoid with substantial electromagnetic axial forces. With a three-dimensional (3D) CMS magnet computer model [
5] based on the 3D finite-element code TOSCA (two scalar potential method) [
6], developed in 1979 [
7] at the Rutherford Appleton Laboratory, the axial force acting on each absorber plate is calculated for
µrel equal to 1.05 and scaled to the conditions expected at a
B0 of 3.81 T using the measured dependence of
µrel on the external magnetic flux density. The influence of HGCal stainless-steel absorber plates with an extreme
µrel value of 1.05 on the CMS solenoid inner magnetic field in the location of the pixel and strip tracking detectors was previously investigated using similar modelling techniques [
8].
A large amount of stainless steel was used in the endcap calorimetry of the D0 detector [
9]. In the north and south end calorimeters of the D0 detector, numerous 46.5 mm thick stainless-steel plates were used as particle absorbers. The 2 T superconducting solenoid [
10] located between the end calorimeters produced a magnetic stray field that was too low to affect the plates substantially. In addition, the volume of stainless steel plates in each end calorimeter was about 10 times less than the volume of the plates in each HGCal compartment. A calculation of the axial electromagnetic forces acting on the D0 end calorimeters has not been reported in the literature. Thus, the present study can be considered pioneering.
This article is organized as follows:
Section 2 describes the model of the HGCal stainless-steel absorber plates inside the CMS superconducting solenoid;
Section 3 contains the results of the axial magnetic force calculations for each stainless-steel absorber plate and for the entire endcap compartment;
Section 4 presents a discussion of the obtained results; and, finally, conclusions are drawn in
Section 5.
2. Description of the HGCal Hadronic Compartment Model
In
Figure 1, a perspective view of the CMS detector is displayed, with existing electromagnetic and hadronic endcap calorimeters shown in green and yellow, respectively. The calorimeters are shown on one side of the solenoid coil. On the other side, their positions are symmetrical with respect to the detector’s middle plane. For the HL-LHC operations, both endcap calorimeters will be replaced with HGCal endcaps.
To absorb the hadronic particles along the entire length of each HGCal endcap, 22 stainless-steel disks with thicknesses ranging from 45 to 95.4 mm interleaved with air gaps of 21.55 mm form in each endcap the shapes shown in
Figure 2 and
Figure 3. In the CMS magnet model, these disks are located 3.6098 to 5.2239 m away from the coil middle plane on both sides of the coil. These distances account for the 12 mm shifts toward the coil center on both sides according to the magnet yoke deformation that occurs under the magnetic forces produced when the magnet is switched on.
Figure 2 and
Figure 3 were developed using the updated CMS magnet 3D model [
5] calculated using an operational direct current of 18.164 kA and a stainless steel
µrel value of 1.05 in the absorber plates that corresponds to the mechanical limitation of the axial magnetic forces acting on the absorbers. As shown in
Figure 2 and
Figure 3, the absorber disks form two cones (small and large) and two cylinders at each side of the inner volume of the coil. The smallest outer diameter of the small cone is 3.2934 m; the outer diameter of the large cylinder is 5.2492 m, and the volume of the absorber plates modeled in each HGCal endcap is 18.9 m
3. The small cone has an angle of 19.09° with respect to the coil axis, and the corresponding angle of the large cone is 52.67°. The cone angle in the transition disks (with numbers ±5) located between the small and large cones is 44.93°. In each endcap, the first eight disks in the conical part (with numbers from ±1 to ±8) have an inner bore with a radius of 0.3136 m; the next four disks (with numbers from ±9 to ±12) have an inner bore with a radius of 0.3836 m; and the last two disks in the conical part (with numbers ±13 and ±14) and all eight cylinder disks (with numbers from ±15 to ±22) have an inner bore of 0.4448 m. The numbers of the disks are positive and increasing when moving from the smallest disk to a back disk in the positive
Z direction, while the disks have negative numeration in the same orientation toward the negative
Z direction, as shown in
Figure 2 and
Figure 3.
The coordinate axes shown in
Figure 2 and
Figure 3 represent the CMS coordinate system, where the origin is at the center of the superconducting solenoid, the
X axis lies in the LHC plane and is directed toward the center of the LHC machine, the
Y axis is directed upward and is perpendicular to the LHC plane, and the
Z axis makes up the right triplet with the
X and
Y axes and is directed along the vector of magnetic flux density created on the axis of the superconducting coil.
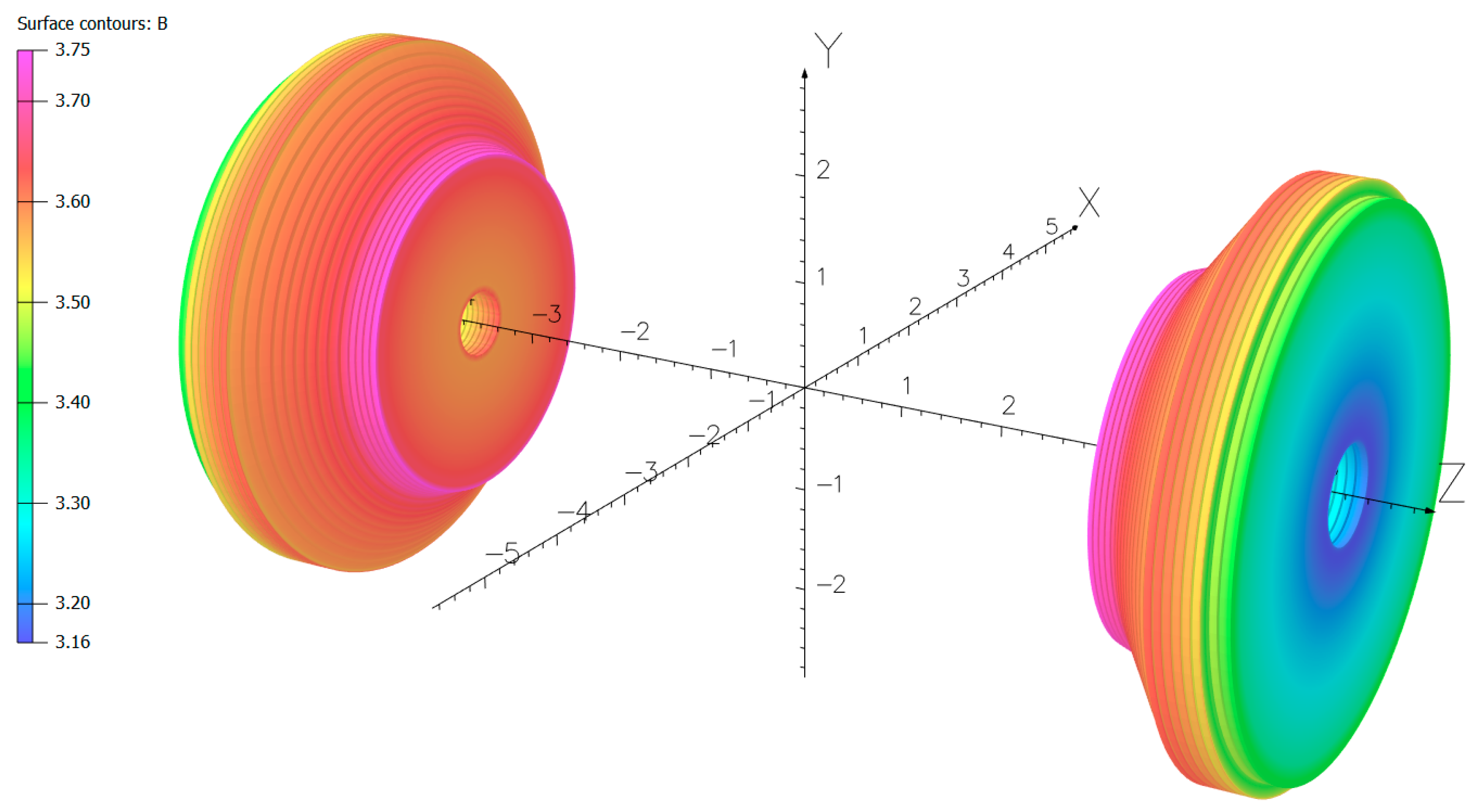
In
Figure 2, the distribution of the magnetic flux density total component
B on the absorber plate surfaces is shown. The distribution of the axial magnetic flux density component
Bz is displayed in
Figure 3. Both components
B and
Bz have a maximum value of 3.75 T and a minimum value of 3.16 T. The radial component of the magnetic flux density
Br has an extremum value of ±0.27 T on the surfaces of the 95.4 mm thick back disks (with numbers ±22).
The central magnetic flux density B0 is equal to 3.817 T and is 0.21% greater than that value in the present CMS configuration. Thus, at a µrel value of 1.05, the contribution of the stainless-steel plate magnetization to the CMS’s inner field is extremely small.
In
Figure 4, the calculated axial magnetic flux density
Bz is shown along the
Z coordinates at an
X coordinate equal to 1.259675 m. This
X coordinate value was determined by averaging the halves of the distances between the outer and inner radii of the first and last disks in the endcap at positive
Z coordinates.
The Bz values were calculated in three models of the CMS magnet: in Model 1, where the relative permeability inside the stainless-steel absorber plates is equal to 1.05; in Model 2, where the relative permeability inside the absorber plates is equal to the permeability of air, i.e., µrel = 1.0; and in Model 3, corresponding to the present configuration of the CMS magnet where the absorber plates are absent. The insertion of the absorber plates required the modification of the spatial finite-element mesh in Models 1 and 2 in comparison with Model 3.
As is visible in
Figure 4, the
Bz values in Model 2, with
µrel = 1.0 for the absorber pates, coincide with the
Bz values in Model 3 without the absorbers. This result confirms the absence of an influence of the modified spatial mesh on the calculated results.
The curve of Bz vs. Z in Model 1, with µrel = 1.05, is rather smooth. This confirms the continuity of the axial magnetic flux density on the stainless steel–air interface since, at X = 1.259675 m, the axial magnetic flux density vector is normal with respect to the surfaces of the disks.
In
Figure 5, the calculated axial magnetic field strength
Hz is shown along the
Z coordinates at the
X coordinate equal to 1.259675 m. Here, the
Hz values in Model 2, with
µrel = 1.0 in the absorber pates, coincide with the
Hz values in Model 3 without the absorbers, and, in Model 1, the axial magnetic field strength at the stainless steel–air interface is 1.05 times larger than that inside the absorber plates. That results from the axial magnetic flux density continuity.
3. Calculation of the Axial Electromagnetic Forces
The force
F acting on the stainless-steel absorber plate with the surface
S, located in the magnetic field with a magnetic flux density
B is calculated by integrating the Maxwell stress tensor [
11] over the absorber surface. The following formula is valid for integration in the air near the absorber surface:
Here,
µ0 is the permeability of free space, and
n is a unit vector of the outer surface normal to the integration surface
S. It was observed that in the range of
µrel < 1.1, the calculated axial force
Fz dependence on
µrel is linear but has a non-zero contribution at
µrel = 1.0 depending on the calculation conditions. If the region in the CMS magnet model where the stainless-steel absorbers are located is characterized by a reduced scalar magnetic potential [
5], then this contribution is negative. If the region with absorbers is characterized by a total scalar magnetic potential [
5], then this contribution is positive. In both cases, the slope of
Fz on
µrel is approximately the same. It was also noticed that dividing the volume of the endcap compartment into a larger number of absorber plates somewhat increases the slope of linear dependence of
Fz on
µrel. Thus, in contrast to previous calculations [
8] performed with five absorber sections in each endcap compartment located in the reduced scalar magnetic potential zone, in the present force calculations, all 22 absorbers in each endcap compartment located in the total scalar magnetic potential zone are used.
The force calculation procedure includes calculating the axial forces in Model 1 using Equation (1) and subtracting from the obtained values the systematic error calculated according to Model 2 where for the absorber plates the relative permeability of air is set.
Figure 6, where the axial forces are calculated for each absorber plate at positive
Z coordinates, illustrates this procedure. The form of the resulting curve in
Figure 6 is explained in
Section 4, which also contains a discussion of the results.
With
µrel = 1.05, the resulting axial forces at a CMS coil operating current of 18.164 kA are −1.584 MN and +1.578 MN on the endcap compartment at positive and negative
Z coordinates, respectively. These values, which are calculated using the total scalar magnetic potential in the compartment regions, are larger than those calculated earlier [
8], with a reduced scalar magnetic potential in the same regions.
The value µrel = 1.05 is the limit value corresponding to the mechanical strength limit when an axial force acts on the endcap compartment integrated in the CMS magnet yoke. Under this limitation, the goal is to select a stainless steel material having the lowest possible relative permeability in balance with the cost of producing the material. In addition, to simplify the choice of material, it is necessary to investigate the dependence of the relative permeability of the stainless steel material on the magnetic field strength or magnetic flux density in the air around the material. This dependence was measured for three selected samples of stainless steel material.
Figure 7 shows this measurement for one of the samples: S1. The relative permeability of stainless steel in sample S1 rapidly drops from 1.04279 at an external magnetic flux density of 0.101 T to 1.01006 at an external magnetic flux density of 0.999 T.
The approximation from the last measured value at 0.999 T to the expected value at an operating coil current of 18.164 kA is made over the last three measured points using a power function, as displayed in
Figure 7. The resulting dependence of
µrel on the external magnetic flux density in region
B0 from 0.808 to 3.81 T has the following form:
From this approximation, it can be determined that the relative permeability of stainless steel in sample S1 is 1.000588 at 3.809442 T.
Using this value, together with two values measured at 0.101 and 0.999 T, the dependence of the axial forces for each endcap compartment on the CMS central magnetic flux density
B0 was calculated using Models 1 and 2.
Figure 7 shows the results of the calculations for the endcap compartment at positive,
Fz abs1, and negative,
Fz abs2,
Z coordinates. As a result, at a CMS coil operating current of 18.164 kA, the axial force
Fz abs1 is −18.63 kN, and
Fz abs2 is +18.56 kN.
Thus, the expected axial forces at a CMS central magnetic flux density of 3.81 T are 85 times less than the axial forces calculated at 3.81 T with the extreme value of the relative permeability of stainless steel at µrel = 1.05.
Figure 8 shows the dependence of the axial forces on the absorber number for positive and negative
Z coordinates. The forces are calculated at two values of the relative permeability of the stainless-steel disks: the maximum of 1.05 and the approximate value of 1.000588 at 3.81 T.
4. Discussion
To explain the form of the dependence of the axial force on the
Z coordinate (as shown in
Figure 6) or on the disk number (as shown in
Figure 8), consider the forces acting on the conical disk. In
Figure 9, the conical disk at the positive
Z coordinates is shown in a longitudinal view.
At the edge of the disk, the surface of integration with Equation (1) is divided by a dashed line into three parts: a cylindrical part with a front plane at Z1 and a back plain at Z2; a conical part on the front side between Z1 and Z2; and an annular part on the back side at Z2. For these three surfaces, integration with Equation (1) can be represented in three forms.
The following equation expresses the axial force
Fz cyl acting on the central surfaces of the disk:
Here, index 1 corresponds to the front surface of the disk, index 2 corresponds to the back side of the disk, and S is the front or rear surface of the central cylinder.
The axial force
Fz cone acting on the conical surface of the disk is described by the following equation:
Here, Br is the radial component of the external magnetic flux density, and θ is the angle of the cone with respect to the Z axis.
The axial force
Fz ring acting on the outer annular surface of the disk is described by the following equation:
Equation (3) describes the main contribution to the axial force. In the region of the positive
Z coordinates,
Fz cyl is negative, since
Bz ~
B and
Bz1 >
Bz2, which follows from
Figure 4. In the region of negative
Z coordinates,
Fz cyl is positive since the directions of the normal unit vectors to the front and back surfaces have the opposite directions relative to those in the region of the positive
Z coordinates. In both cases, the axial forces are exerted towards the CMS’s coil center.
By combining Equations (4) and (5), we concluded that the axial force acting on the peripheral part of the conical disk −|
Fz cone| + |
Fz ring| is positive in the region of positive
Z coordinates and negative in the region of negative
Z coordinates, and in both cases, the forces are directed outwards the center of the CMS coil. From these two circumstances, we can conclude that the shape of the axial force dependence on the
Z coordinate or disk number shown in
Figure 6 and
Figure 8, respectively, can be explained by a quadratic increase in the surfaces of the cylindrical part of the conical disks and by a linear increase in the differences between the axial and total components of the magnetic flux densities on the front and back sides of the disk.
5. Conclusions
In this study, the calculation of the electromagnetic forces acting on the stainless steel hadronic compartments of a new high granularity calorimeter is performed using the updated three-dimensional model of the Compact Muon Solenoid (CMS) magnet. We plan to place twenty-two 45, 41.5, 60.7, and 95.4 mm thick stainless-steel disks, with 21.55 mm air gaps between the disks in each endcap compartment located in the CMS magnetic field with a magnetic flux density of 3.81 T. With a relative permeability value of 1.05, the maximum axial force acting on the disk plate is 0.486 MN, and the maximum total axial force acting on the 22 plates in the compartment is 1.584 MN. With a relative permeability of 1.000588, approximated for a central magnetic flux density of 3.81 T, the maximum axial force acting on the disk plate is 5.72 kN, and the maximum total axial force acting on the 22 plates in the compartment is 18.6 kN, which is 85 times less than, and thus well below, the safety margins. The form of the dependence of the axial force on the position of the disk in the endcap compartment is determined by the increase in area of each disk with the increase in distance from the center of the CMS coil and by the distribution of the magnetic flux density along the radii of the disks in a non-uniform magnetic flux at the edges of the CMS coil. The force calculation procedure used in this study has not been described in the literature.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








