
Energy-Efficient Deep Neural Networks for EEG Signal Noise Reduction in Next-Generation Green Wireless Networks and Industrial IoT Applications



Abstract
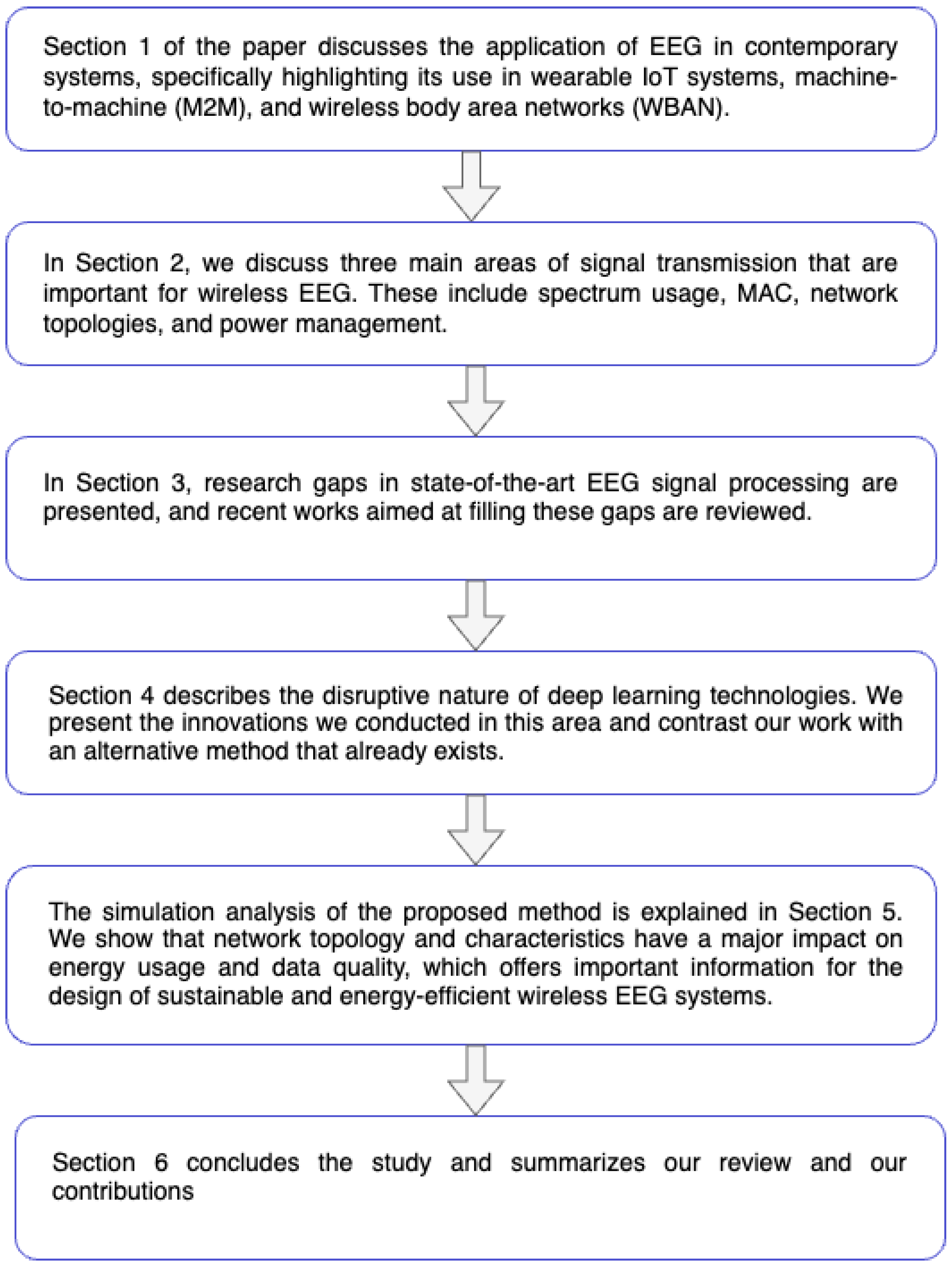
:1. Introduction
2. Current Technologies
2.1. EEG in Recent Use
- Signal from the heart (ECG, EKG, or electrocardiogram);
- EMG artifacts caused by muscle contractions;
- An electrooculogram (EOG) is a signal produced by eyeball movement;
- Lines of AC power, electronics, etc.
2.2. Digital Modulation for BCI
2.2.1. M2M Technologies with Application to BCI and EEG
2.2.2. Key Aspects to Consider for M2M and WBAN
- Device and Traffic Heterogeneity: M2M devices in mHealth often comprise various medical sensors situated on or within the human body. These sensors wirelessly transmit real-time data for continuous patient monitoring by healthcare professionals. Sensors can measure various physiological parameters such as heart rate, muscle activity, and brain signals, whereas actuators act on commands from sensors or manual input to perform specific tasks, such as insulin delivery.
- Energy Efficiency: Given the compact size requirements for body sensors, battery size and life become critical. Replacing batteries, particularly in implantable devices, is highly inconvenient and requires energy-efficient designs. Therefore, low-power transceiver architectures and energy-aware communication protocols are required.
- Quality of Service (QoS): M2M mHealth systems exhibit a broad range of traffic patterns, from low-rate monitoring to high-bandwidth, real-time applications. End-to-end delay is often the most stringent QoS requirement, particularly in real-time monitoring scenarios. Medical applications typically require support for bit error rates ranging from milli to micro levels with a maximum allowable delay of 125 ms. Alert mechanisms that trigger warnings based on preset thresholds are also integral to the system.
- Reliability: In mHealth applications, reliable data transmission from patients to the medical staff is imperative. WBANs, particularly on the patient’s side, are the most vulnerable components of the M2M architecture because of the inherently error-prone nature of biological channels. Consequently, these networks must be designed considering factors such as patient mobility, specific absorption rates (SAR), and the interference environment.
- User posture and context: Although body posture can affect sensor readings, our study assumes that the user is in a sitting position and does not incorporate specific variables in the experiment.
- Network topology: In most WBAN setups, star topology is prevalent, where all sensor devices connect directly to a central WBAN coordinator. However, network reliability and energy efficiency can be enhanced by using sensors as relays [25,26,27,28,29]. In M2M communication, point-to-point medium to long-range connections between the gateway and core network are typically assumed (e.g., via WLAN or LTE). Advanced topologies that exploit multiple Wireless Sensor Networks [30] or ambient sensor networks [31] can be considered for efficient routing and cooperation.
- Transmission and data retrieval: mHealth applications necessitate secure wireless transmission and storage of sensitive medical data. Therefore, a robust strategy is imperative to safeguard M2M communications [32]. New schemes must be developed to cater to the unique characteristics of various technologies to create interoperable and technology-agnostic security protocols.
- Technology integration: The wireless technologies employed across different layers of the M2M system have unique challenges and must be meticulously integrated for effective mHealth applications. Access technologies such as LTE, WiMAX, and IEEE 802.11 WLAN must be tailored to meet the specific requirements of WBANs. Customization is crucial for achieving end-to-end quality of service (QoS), scalability, and ubiquitous connectivity. The subsequent section in this chapter will delve deeper into current communication standards, emphasizing the importance of technology integration in machine-type brain interfaces.
2.2.3. Communication Standards for EEG
- Power management: To extend battery life and comply with safety regulations concerning SAR, IEEE 802.15.6 employs both macroscopic and microscopic power management strategies, including hibernation and sleep modes.
- Security and privacy: This standard ensures the timely delivery of alarms in emergency situations and incorporates robust security measures to safeguard patient privacy and data confidentiality.
- Physical layer technologies: Three distinct technologies are supported at the PHY layer-ultra-wideband (UWB) PHY, which leverages a wide bandwidth for high performance, robustness, low complexity, and ultra-low power; and human body communication (HBC) PHY, which utilizes the human body as a transmission medium.
- Frequency bands: The standard accommodates multiple frequency bands, from the unlicensed 2.4 GHz range to the 402–405 MHz Medical Implant Communications Service (MICS) band reserved for medical implants.
- MAC layer priorities: IEEE 802.15.6 defines eight user priorities at the MAC layer, where 0 represents the lowest and 7 represents the highest priority, typically used for medical emergencies or implant-related events.
- Network topology: WBANs operating under this standard typically use an extended star topology, where all nodes connect directly to a hub or through a single relay node.
- Access protocols: Both contention-free and contention-based channels are considered. For the latter, two random access protocols are specified: slotted Aloha and carrier-sense multiple access with collision avoidance (CSMA/CA).
- Integration with M2M systems: To enable end-to-end M2M communication, sensors must connect to the Internet via an M2M gateway, typically using WLAN/WMAN standards such as WLAN (802.11), WiMAX (802.16), and LTE/LTE-A.
3. Recent Advanced Methods
3.1. Channel Selection for BCI
- Scalp EEG acquisition: Typically chosen for its cost-effectiveness, ease of use, portability, and excellent temporal resolution. Two primary modes, bipolar and unipolar, exist for the recording of scalp EEG signals. The International 10–20 system, recommended by the International Federation of Societies for Electroencephalography and Clinical Neurophysiology (IFSECN), guides electrode placement on the scalp.
- Identification of brain waves: Frequency bands such as beta, alpha, theta, and gamma encapsulate the most significant data related to human cognitive states. These bands provide invaluable information for diagnosing various mental states and disorders.
- Developments in EEG-based processing: Advances in low-cost interfaces have fostered the development of channel selection algorithms. These algorithms target enhancing the model performance, speeding up processing, and enabling dimensionality reduction. Multiple evaluation methods, such as filtering, wrapping, embedding, and hybrid approaches, have been employed for this purpose.
- Filtering approach: Known for its speed and classifier independence, it often requires additional refinement for accuracy [37].
- Wrapper approach: Involves using a classification algorithm to evaluate channel subsets, adding an extra layer of scrutiny [38].
- Embedded approach: Integrates channel selection and classification, reducing the likelihood of overfitting.
- Hybrid approach: A combination of filtering and wrapping techniques was designed to circumvent the need for a stopping criterion [39].
- Human-guided approach: This approach utilizes expert judgment in certain applications, such as seizure detection, offering the advantage of reduced computational requirements.
3.2. Secure Wireless Communications Based on Compressive Sensing
- Signal capture: Brain-measuring hardware captures EEG data, which are subsequently visualized and recorded using SDK or API software.
- Preprocessing: This stage entails the removal of electrical interference and musculoskeletal noise to prepare raw signals for further analysis.
- Classification: Segregated patterns are classified into discernible categories, serving as a basis for subsequent control interface commands.
3.3. Distributed Signal Processing
4. Deep Learning for EEG
4.1. Deep Learning and EEG
- Convolutional layers: Specialized in feature extraction.
- Pooling layers: Focused on reducing the dimensionality of the data.
4.2. EEG Signal Compression with Deep Convolutional Autoencoders Integrated into Real-Time BCIs
4.3. Current Works in EEG Deep Learning
5. Experiments
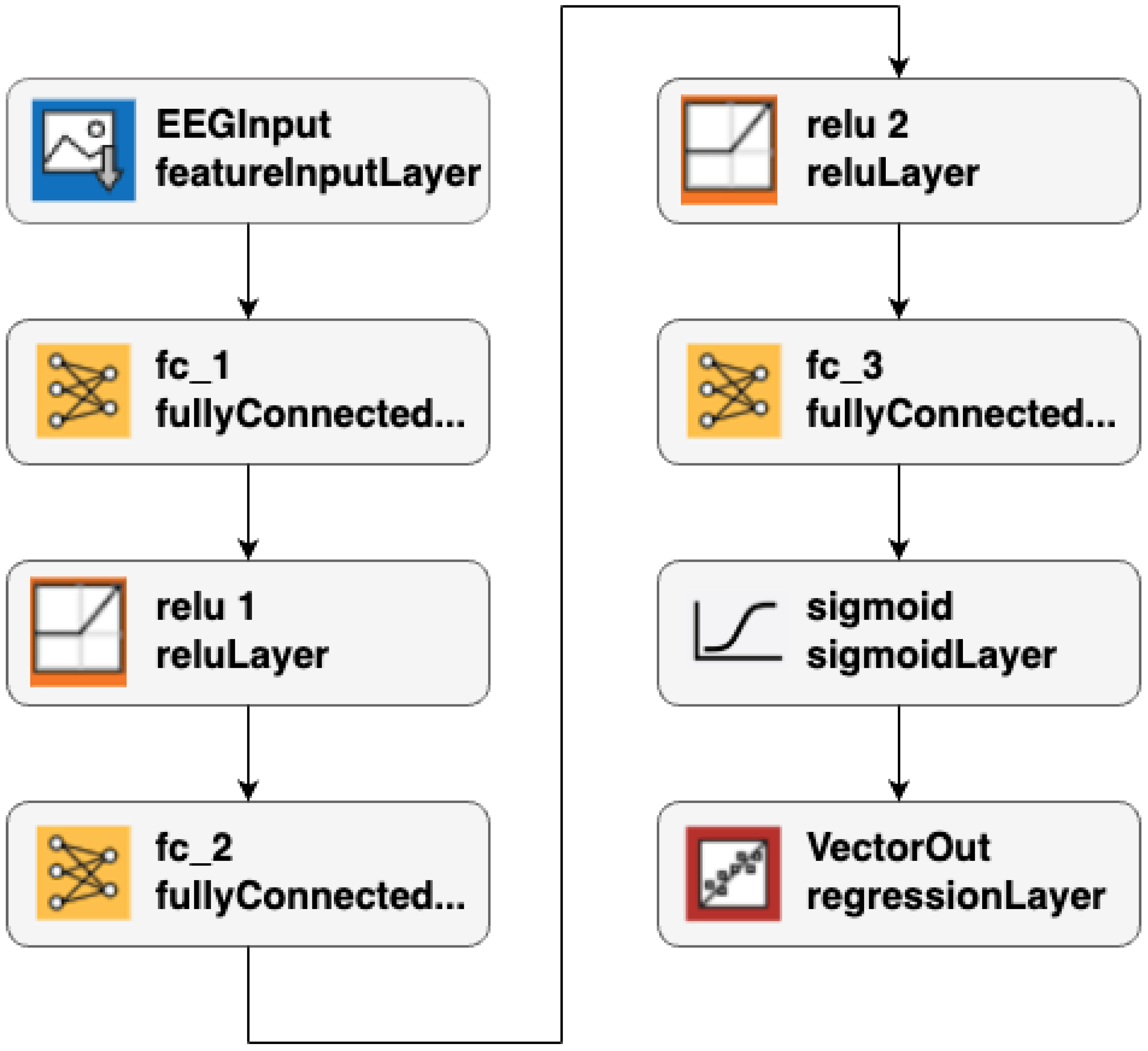
5.1. Prototype Network One
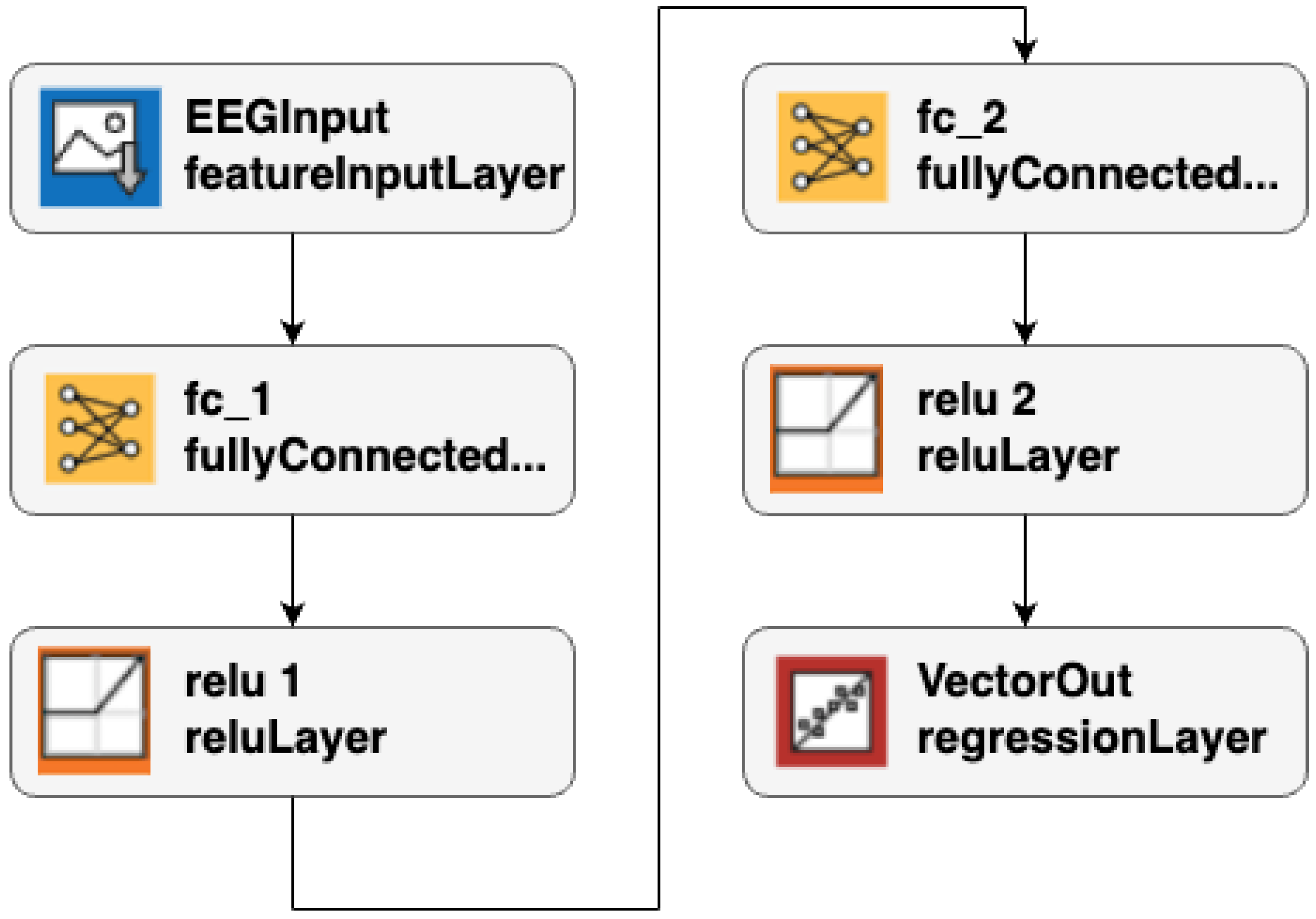
5.2. Prototype Network Two
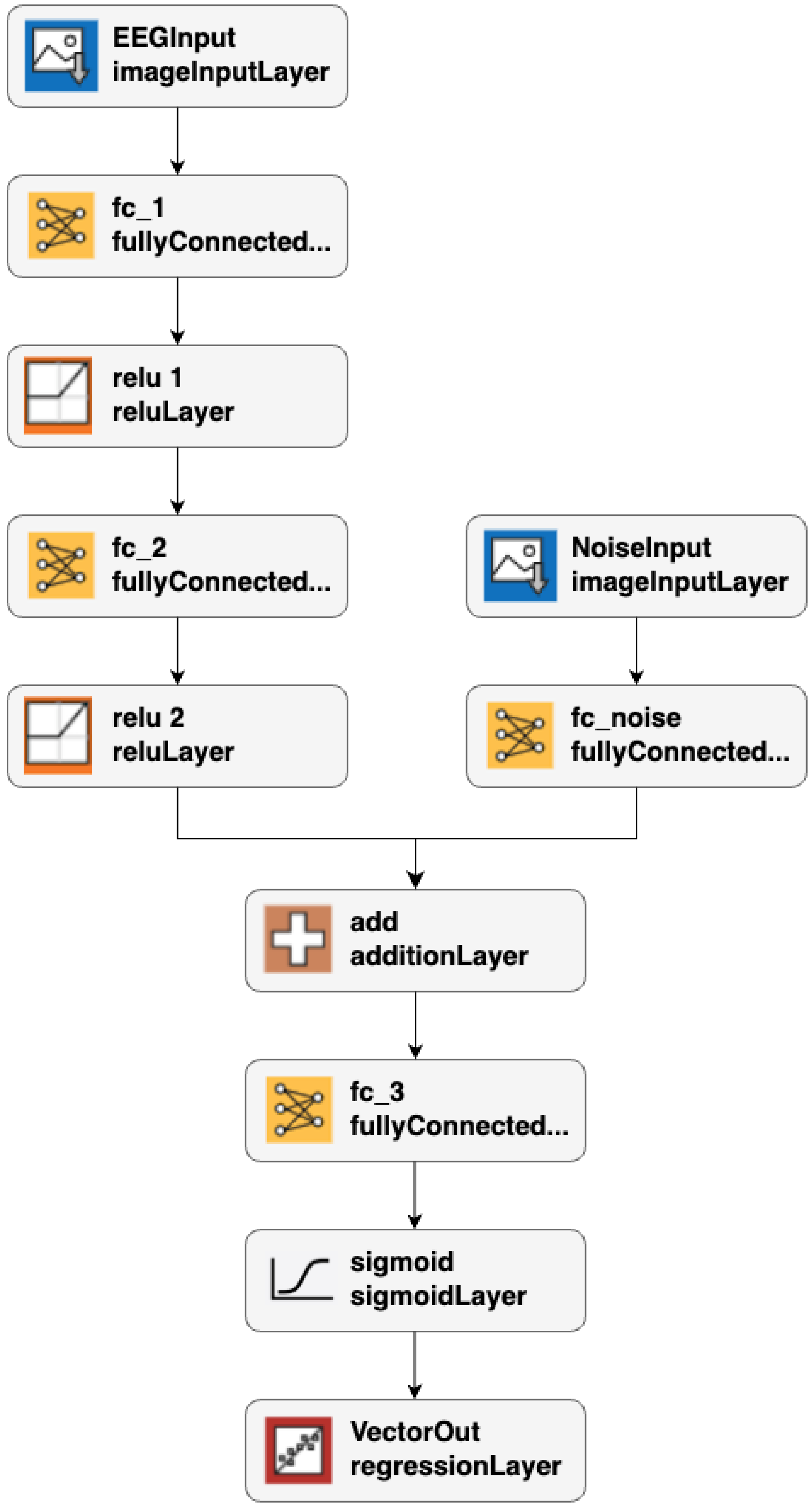
5.3. Noise Simulation Network
5.4. Network Results
5.5. Troubleshooting
5.5.1. Variations in Experiment
5.5.2. Change in Architecture
5.5.3. Smaller Channel Sample
5.5.4. Leaky ReLUs
5.5.5. Moving Average
5.5.6. Changed Noise Characteristics
5.6. Advantages of the Use of Deep Learning Approach
5.7. Complexity
5.8. Study of Symmetry
6. Discussion and Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Famoriji, O.J.; Ogundepo, O.Y.; Qi, X. An intelligent deep learning-based direction-of-arrival estimation scheme using spherical antenna array with unknown mutual coupling. IEEE Access 2020, 8, 179259–179271. [Google Scholar] [CrossRef]
- Famoriji, O.J.; Shongwe, T. Electromagnetic machine learning for estimation and mitigation of mutual coupling in strongly coupled arrays. ICT Express 2021, 9, 8–15. [Google Scholar] [CrossRef]
- Thakur, N.; Han, C.Y. An intelligent ubiquitous activity aware framework for smart home. In Proceedings of the Human Interaction, Emerging Technologies and Future Applications III: Proceedings of the 3rd International Conference on Human Interaction and Emerging Technologies: Future Applications (IHIET 2020), Paris, France, 27–29 August 2020; Springer: Berlin/Heidelberg, Germany, 2021; pp. 296–302. [Google Scholar]
- Mekruksavanich, S.; Jitpattanakul, A. Smartwatch-based human activity recognition using hybrid lstm network. In Proceedings of the 2020 IEEE Sensors, Rotterdam, The Netherlands, 25–28 October 2020. [Google Scholar]
- Al-Kadi, M.I.; Reaz, M.B.I.; Ali, M.A.M. Evolution of electroencephalogram signal analysis techniques during anesthesia. Sensors 2013, 13, 6605–6635. [Google Scholar] [CrossRef]
- Bera, T.K. A Review on The Medical Applications of Electroencephalography (EEG). In Proceedings of the 2021 Seventh International Conference on Bio Signals, Images, and Instrumentation (ICBSII), Chennai, India, 25–27 March 2021; pp. 1–6. [Google Scholar]
- Jamil, N.; Belkacem, A.N.; Ouhbi, S.; Lakas, A. Noninvasive electroencephalography equipment for assistive, adaptive, and rehabilitative brain–computer interfaces: A systematic literature review. Sensors 2021, 21, 4754. [Google Scholar] [CrossRef]
- Baqai, A.; Umrani, F.A.; Chowdhry, B.S. Led based optical wireless communication system for WBAN. Mehran Univ. Res. J. Eng. Technol. 2016, 35, 667–672. [Google Scholar] [CrossRef]
- Teshome, A.K.; Kibret, B.; Lai, D.T. A review of implant communication technology in WBAN: Progress and challenges. IEEE Rev. Biomed. Eng. 2018, 12, 88–99. [Google Scholar] [CrossRef] [PubMed]
- Mercuri, M.; Karsmakers, P.; Vanrumste, B.; Leroux, P.; Schreurs, D. Biomedical wireless radar sensor network for indoor emergency situations detection and vital signs monitoring. In Proceedings of the 2016 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems (BioWireleSS), Austin, TX, USA, 24–27 January 2016; pp. 32–35. [Google Scholar]
- Arbi, K.F.; Kromba, I.; Saffih, F.; Amina, B.R.; Slami, A.; Hadjersi, A.; Soulimane, S.; Nigassa, M.E.B. Intelligent IoT (I 2 oT) Biomedical Wearable System based on Smartphone Application. In Proceedings of the 2020 IEEE 5th Middle East and Africa Conference on Biomedical Engineering (MECBME), Amman, Jordan, 27–29 October 2020; pp. 1–4. [Google Scholar]
- Chi, Y.M.; Cauwenberghs, G. Wireless non-contact EEG/ECG electrodes for body sensor networks. In Proceedings of the 2010 International Conference on Body Sensor Networks, Singapore, 7–9 June 2010; pp. 297–301. [Google Scholar]
- Nandyala, C.S.; Kim, H.K. From cloud to fog and IoT-based real-time U-healthcare monitoring for smart homes and hospitals. Int. J. Smart Home 2016, 10, 187–196. [Google Scholar] [CrossRef]
- Pigeon, M.; Buckley, J.; Barton, J. Wireless Implantable Medical Device: In-body EM losses for a multilayer body model. In Proceedings of the 2021 IEEE Asia-Pacific Microwave Conference (APMC), Brisbane, Australia, 28 November–1 December 2021; pp. 389–391. [Google Scholar]
- Li, K.; Zhuang, S.; Liu, J.; Guo, A.; Wang, A.; Lu, J.; Xue, F. Design of an intelligent medical splint with 3D printing and pressure detection. In Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Nanchang, China, 26–28 March 2021; pp. 655–658. [Google Scholar]
- Tuan, C.C.; Lu, C.H.; Wu, Y.C.; Yeh, W.L.; Chen, M.C.; Lee, T.F.; Chen, Y.J.; Kao, H.K. Development of a system for real-time monitoring of pressure, temperature, and humidity in casts. Sensors 2019, 19, 2417. [Google Scholar] [CrossRef]
- Maag, A.-L.D.; Laufer, S.; Kwan, C.; Cohen, E.R.; Lenhart, R.L.; Stork, N.C.; Halanski, M.A.; Pugh, C.M. Sensor-based assessment of cast placement and removal. Stud. Health Technol. Inform. 2014, 196, 259. [Google Scholar]
- Wang, J.; Guo, Y.; Li, G.L. Current status of standardization of traditional Chinese medicine in China. Evid.-Based Complement. Altern. Med. 2016, 2016, 9123103. [Google Scholar] [CrossRef] [PubMed]
- Alqahtani, M. IOT within the Saudi Healthcare Industry during COVID-19. In Proceedings of the International Conference on Emerging Technologies and Intelligent Systems: ICETIS 2021 (Volume 1), Al Buraimi, Oman, 25–26 June 2021; Springer: Berlin/Heidelberg, Germany, 2022; pp. 469–483. [Google Scholar]
- Cheng, L.; Hao, C.; Li, H.; Chi, Z.; Guo, L.; Wu, Y.; Chen, S.; Hu, H.; Liu, X.; Bai, X.; et al. The Application of Sensors in the Auxiliary Medical Devices. In Proceedings of the 2021 14th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 23–25 October 2021; pp. 1–5. [Google Scholar]
- Kong, L.; Cheng, L.; Wan, P.; Liu, X. Development and Intellectualization of Ramie Fiber Composites Medical Splint. Cailiao Daobao/Mater. Rev. 2018, 32, 1202–1208. [Google Scholar] [CrossRef]
- Kelly, S.; Paterson, A.; Bibb, R. A review of wrist splint designs for additive manufacture. In Proceedings of the 2015 14th Rapid Design, Prototyping and Manufacture Conference (RDPM 14), Loughborough, UK, 15–16 December 2015. [Google Scholar]
- Fess, E.E. A history of splinting: To understand the present, view the past. J. Hand Ther. 2002, 15, 97–132. [Google Scholar] [CrossRef]
- Valenti, A.; Barsotti, M.; Brondi, R.; Bacciu, D.; Ascari, L. ROS-neuro integration of deep convolutional autoencoders for EEG signal compression in real-time BCIs. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 1–14 October 2020; pp. 2019–2024. [Google Scholar]
- Hieu, T.C.; Hiep, P.T.; Dinh, H. A study of hierarchical topology and spatial reuse superframe for cluster-based WBAN. In Proceedings of the 2019 6th NAFOSTED Conference on Information and Computer Science (NICS), Hanoi, Vietnam, 12–13 December 2019; pp. 410–415. [Google Scholar]
- Hu, F.; Wang, S.; Du, Y.; Deng, Y. An energy-efficiency index based on death probability for maximizing WBAN reward. Int. J. Electron. Lett. 2017, 5, 261–271. [Google Scholar] [CrossRef]
- Qiu, Y.; Haley, D.; Chan, T.; Davis, L. Game theoretic framework for studying WBAN coexistence: 2-Player game analysis and n-player game estimation. In Proceedings of the 2016 Australian Communications Theory Workshop (AusCTW), Melbourne, Australia, 20–22 January 2016; pp. 53–58. [Google Scholar]
- Hiep, P.; Kohno, R. Optimizing Packet Generation Rate for Multiple Hops WBAN with CSMA/CA Based on IEEE802.15.6. Commun. Netw. 2014, 6, 112–123. [Google Scholar] [CrossRef]
- Samanta, A.; Misra, S. Energy-efficient and distributed network management cost minimization in opportunistic wireless body area networks. IEEE Trans. Mob. Comput. 2017, 17, 376–389. [Google Scholar] [CrossRef]
- Ahmed, O.; Ren, F.; Hawbani, A.; Al-Sharabi, Y. Energy optimized congestion control-based temperature aware routing algorithm for software defined wireless body area networks. IEEE Access 2020, 8, 41085–41099. [Google Scholar] [CrossRef]
- Xu, S.; Wang, X.; Yang, G.; Ren, J.; Wang, S. Routing optimization for cloud services in SDN-based Internet of Things with TCAM capacity constraint. J. Commun. Netw. 2020, 22, 145–158. [Google Scholar] [CrossRef]
- Vambe, W.T.; Sibanda, K. A fog computing framework for quality of service optimisation in the internet of things (iot) ecosystem. In Proceedings of the 2020 2nd International Multidisciplinary Information Technology and Engineering Conference (IMITEC), Kimberley, South Africa, 25–27 November 2020; pp. 1–8. [Google Scholar]
- Frey, S.; Guermandi, M.; Benatti, S.; Kartsch, V.; Cossettini, A.; Benini, L. BioGAP: A 10-core FP-capable ultra-low power IoT processor, with medical-grade AFE and BLE connectivity for wearable biosignal processing. In Proceedings of the 2023 IEEE International Conference on Omni-layer Intelligent Systems (COINS), Berlin, Germany, 23–25 July 2023; pp. 1–7. [Google Scholar]
- Kim, D.U.; Lee, J.; Kim, M.; Kim, J.; Lee, J.; Heo, D.; Kim, S.P. The Effect of Wireless Communication Interference on Wireless BCI. In Proceedings of the 2023 11th International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Republic of Korea, 20–22 February 2023; pp. 1–4. [Google Scholar]
- Zhou, T.; Mei, Z.; Zhu, X.; Huang, Z. Synchrony detection of epileptic eeg signals based on attention and pearson’s correlation coefficient. In Proceedings of the 2020 13th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Chengdu, China, 17–19 October 2020; pp. 531–535. [Google Scholar]
- Banville, H.; Albuquerque, I.; Hyvärinen, A.; Moffat, G.; Engemann, D.A.; Gramfort, A. Self-supervised representation learning from electroencephalography signals. In Proceedings of the 2019 IEEE 29th International Workshop on Machine Learning for Signal Processing (MLSP), Pittsburgh, PA, USA, 13–16 October 2019; pp. 1–6. [Google Scholar]
- Jindal, K.; Upadhyay, R.; Singh, H.S. A novel EEG channel selection and classification methodology for multi-class motor imagery-based BCI system design. Int. J. Imaging Syst. Technol. 2022, 32, 1318–1337. [Google Scholar] [CrossRef]
- Li, X.; Ma, Y.; Zhang, Q.; Gao, Y. EEG characteristics extraction and classification based on R-CSP and PSO-SVM. In Proceedings of the 10th International Conference on Computer Engineering and Networks, Xi’an, China, 16–18 October 2020; Springer: Berlin/Heidelberg, Germany, 2021; pp. 1658–1667. [Google Scholar]
- Lee, J.; Chung, W. Motor Imagery Classification using local region CSP features with high-gamma band. In Proceedings of the 2021 9th International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Republic of Korea, 22–24 February 2021; pp. 1–4. [Google Scholar]
- Lou, H.; Ye, Z.; Yao, L.; Zhang, Y. Less Is More: Brain Functional Connectivity Empowered Generalizable Intention Classification With Task-Relevant Channel Selection. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 1888–1899. [Google Scholar] [CrossRef]
- Wang, J.; Shi, L.; Wang, W.; Hou, Z.G. Efficient brain decoding based on adaptive eeg channel selection and transformation. IEEE Trans. Emerg. Top. Comput. Intell. 2022, 6, 1314–1323. [Google Scholar] [CrossRef]
- Keerthika, P.; Sivachitra, M.; Bala, M.P. Eye state EEG signal classification using complex valued neural classifiers. In Proceedings of the 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17–18 March 2017; pp. 1–4. [Google Scholar]
- Jingwei, L.; Yin, C.; Weidong, Z. Deep learning EEG response representation for brain computer interface. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 3518–3523. [Google Scholar]
- Swee, S.K.; You, L.Z. Fast fourier analysis and EEG classification brainwave controlled wheelchair. In Proceedings of the 2016 2nd International Conference on Control Science and Systems Engineering (ICCSSE), Singapore, 27–29 July 2016; pp. 20–23. [Google Scholar]
- Shobana, M.G.; Sajitha, S.; Abirami, S. Brain Computer Interface using EEG Signal for Actuating a 3 DOF Robotic Arm. In Proceedings of the 2022 4th International Conference on Smart Systems and Inventive Technology (ICSSIT), Tirunelveli, India, 20–22 January 2022; pp. 637–640. [Google Scholar]
- Shankhdhar, A.; Mangla, A.; Singh, A.K.; Srivastava, A. Operating of a Drone Using Human Intent Recognition and Characteristics of an EEG Signal. In Proceedings of the 2020 Sixth International Conference on Parallel, Distributed and Grid Computing (PDGC), Waknaghat, India, 6–8 November 2020; pp. 324–327. [Google Scholar]
- Emara, H.M.; El-Shafai, W.; Algarni, A.D.; Soliman, N.F.; Abd El-Samie, F.E. A Hybrid Compressive Sensing and Classification Approach for Dynamic Storage Management of Vital Biomedical Signals. IEEE Access 2023, 11, 108126–108151. [Google Scholar] [CrossRef]
- Rivera-Flor, H.; Gurve, D.; Floriano, A.; Delisle-Rodriguez, D.; Mello, R.; Bastos-Filho, T. CCA-based compressive sensing for SSVEP-based brain-computer interfaces to command a robotic wheelchair. IEEE Trans. Instrum. Meas. 2022, 71, 1–10. [Google Scholar] [CrossRef]
- Kumar, G.; Chatterjee, B.; Sen, S. CS-audio: A 16 pJ/b 0.1–15 Mbps compressive sensing IC with DWT sparsifier for audio-AR. IEEE J. Solid-State Circuits 2022, 57, 2220–2235. [Google Scholar]
- Bertrand, A. Distributed signal processing for wireless EEG sensor networks. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 923–935. [Google Scholar] [CrossRef]
- Musluoglu, C.A.; Bertrand, A. Distributed adaptive trace ratio optimization in wireless sensor networks. IEEE Trans. Signal Process. 2021, 69, 3653–3670. [Google Scholar] [CrossRef]
- Musluoglu, C.A.; Bertrand, A. Distributed trace ratio optimization in fully-connected sensor networks. In Proceedings of the 2020 28th European Signal Processing Conference (EUSIPCO), Amsterdam, The Netherlands, 18–21 January 2021; pp. 1991–1995. [Google Scholar]
- Kordestani, M.; Dehghani, M.; Moshiri, B.; Saif, M. A new fusion estimation method for multi-rate multi-sensor systems with missing measurements. IEEE Access 2020, 8, 47522–47532. [Google Scholar] [CrossRef]
- Jamalullah, S.R.; Gladence, L.M. Implementing clustering methodology by obtaining centroids of sensor nodes for human brain functionality. In Proceedings of the 2020 6th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 March 2020; pp. 1107–1110. [Google Scholar]
- Jagadish, B.; Kiran, M.S.; Rajalakshmi, P. A novel system architecture for brain controlled IoT enabled environments. In Proceedings of the 2017 IEEE 19th International Conference on e-Health Networking, Applications and Services (Healthcom), Dalian, China, 12–15 October 2017; pp. 1–5. [Google Scholar]
- Hassani, A.; Plata-Chaves, J.; Bahari, M.H.; Moonen, M.; Bertrand, A. Multi-task wireless sensor network for joint distributed node-specific signal enhancement, LCMV beamforming and DOA estimation. IEEE J. Sel. Top. Signal Process. 2017, 11, 518–533. [Google Scholar] [CrossRef]
- Strypsteen, T.; Bertrand, A. Bandwidth-efficient distributed neural network architectures with application to neuro-sensor networks. IEEE J. Biomed. Health Inform. 2022, 27, 933–943. [Google Scholar] [CrossRef] [PubMed]
- Yao, Q.; Gu, H.; Wang, S.; Li, X. A feature-fused convolutional neural network for emotion recognition from multichannel EEG signals. IEEE Sens. J. 2022, 22, 11954–11964. [Google Scholar] [CrossRef]
- Zhen, C.; Changhui, L. Music audio sentiment classification based on CNN-BiLSTM and attention model. In Proceedings of the 2021 4th International Conference on Robotics, Control and Automation Engineering (RCAE), Wuhan, China, 4–6 November 2021; pp. 156–160. [Google Scholar]
- Deepak, S.; Prasad, B. Music Classification based on Genre using LSTM. In Proceedings of the 2020 Second International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 15–17 July 2020; pp. 985–991. [Google Scholar]
- Schlögl, A.; Lee, F.; Bischof, H.; Pfurtscheller, G. Characterization of four-class motor imagery EEG data for the BCI-competition 2005. J. Neural Eng. 2005, 2, L14. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.K.; Choi, Y.S. A convolution neural networks scheme for classification of motor imagery EEG based on wavelet time-frequecy image. In Proceedings of the 2018 International Conference on Information Networking (ICOIN), Chiang Mai, Thailand, 10–12 January 2018; pp. 906–909. [Google Scholar]
- Yao, Z.; Liu, X. A cnn-transformer deep learning model for real-time sleep stage classification in an energy-constrained wireless device. In Proceedings of the 2023 11th International IEEE/EMBS Conference on Neural Engineering (NER), Baltimore, MD, USA, 24–27 April 2023; pp. 1–4. [Google Scholar]
- Nguyen, H.T.; Mai, N.D.; Lee, B.G.; Chung, W.Y. Behind-the-Ear EEG-based Wearable Driver Drowsiness Detection System using Embedded Tiny Neural Networks. IEEE Sens. J. 2023, 23, 23875–23892. [Google Scholar] [CrossRef]
- Anjum, K.; Pompili, D. Anisotropic Diffusion-based Analog CNN Architecture for Continuous EEG Monitoring. In Proceedings of the 2023 IEEE 20th International Conference on Mobile Ad Hoc and Smart Systems (MASS), Toronto, ON, Canada, 25–27 September 2023; pp. 195–203. [Google Scholar]
- Ahmed, F.; Iqbal, H.; Nouman, A.; Maqbool, H.F.; Zafar, S.; Saleem, M.K. A non Invasive Brain-Computer-Interface for Service Robotics. In Proceedings of the 2023 3rd International Conference on Artificial Intelligence (ICAI), Islamabad, Pakistan, 22–23 February 2023; pp. 142–147. [Google Scholar]
- Ammar, H.; Shrara, H.; Nassereddine, M.; Charara, J.; Sbeity, F. An EEG Study of the Student’s Confusion Using Deep Learning. In Proceedings of the 2023 Seventh International Conference on Advances in Biomedical Engineering (ICABME), Beirut, Lebanon, 12–13 October 2023; pp. 121–124. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Default | Architecture 2 | Architecture 3 | Architecture 4 | |
|---|---|---|---|---|
| Training Loss after 200 epochs (Mini Batch RMSE) | 3.65 | 2.33 | 2.29 | 3.61 |
| (Mini Batch MSE) | 13.3225 | 5.4289 | 5.2441 | 13.0321 |
| Testing RMSE | 0.639 | 0.6529 | 0.427 | 0.3744 |
| Testing MSE | 0.408 | 0.426 | 0.182 | 0.14 |
| Different ReLUs | Moving Average | Changed Parameters | Smaller Sample Size | |
| Training Loss after 200 epochs (Mini Batch RMSE) | 3.65 | 3.72 | 3.67 | 3.52 |
| (Mini Batch MSE) | 13.32 | 13.83 | 13.46 | 12.39 |
| Testing RMSE (Four test samples) | 0.6365 | 0.632 | 0.6378 | 0.6458 |
| Testing MSE | 0.405 | 0.399 | 0.406 | 0.417 |
| EbNo | EsNo | SNR | BitsPerSymbol | SignalPower | |
|---|---|---|---|---|---|
| Default Parameters | 10 | 10 | 10 | 1 | 1 |
| New Parameters | 20 | 20 | 20 | 2 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, A.; Chakravarthy, S.; Nanthaamornphong, A. Energy-Efficient Deep Neural Networks for EEG Signal Noise Reduction in Next-Generation Green Wireless Networks and Industrial IoT Applications. Symmetry 2023, 15, 2129. https://doi.org/10.3390/sym15122129
Kumar A, Chakravarthy S, Nanthaamornphong A. Energy-Efficient Deep Neural Networks for EEG Signal Noise Reduction in Next-Generation Green Wireless Networks and Industrial IoT Applications. Symmetry. 2023; 15(12):2129. https://doi.org/10.3390/sym15122129
Chicago/Turabian StyleKumar, Arun, Sumit Chakravarthy, and Aziz Nanthaamornphong. 2023. "Energy-Efficient Deep Neural Networks for EEG Signal Noise Reduction in Next-Generation Green Wireless Networks and Industrial IoT Applications" Symmetry 15, no. 12: 2129. https://doi.org/10.3390/sym15122129
APA StyleKumar, A., Chakravarthy, S., & Nanthaamornphong, A. (2023). Energy-Efficient Deep Neural Networks for EEG Signal Noise Reduction in Next-Generation Green Wireless Networks and Industrial IoT Applications. Symmetry, 15(12), 2129. https://doi.org/10.3390/sym15122129