


Error State Extended Kalman Filter Localization for Underground Mining Environments


Abstract
:1. Introduction
2. Simulation Methodology
2.1. Reference Frame Decomposition
- Body frame ,
- Local frame ,
- Earth-North-UP frame ,
- Earth-Centered, Earth-Fixed frame

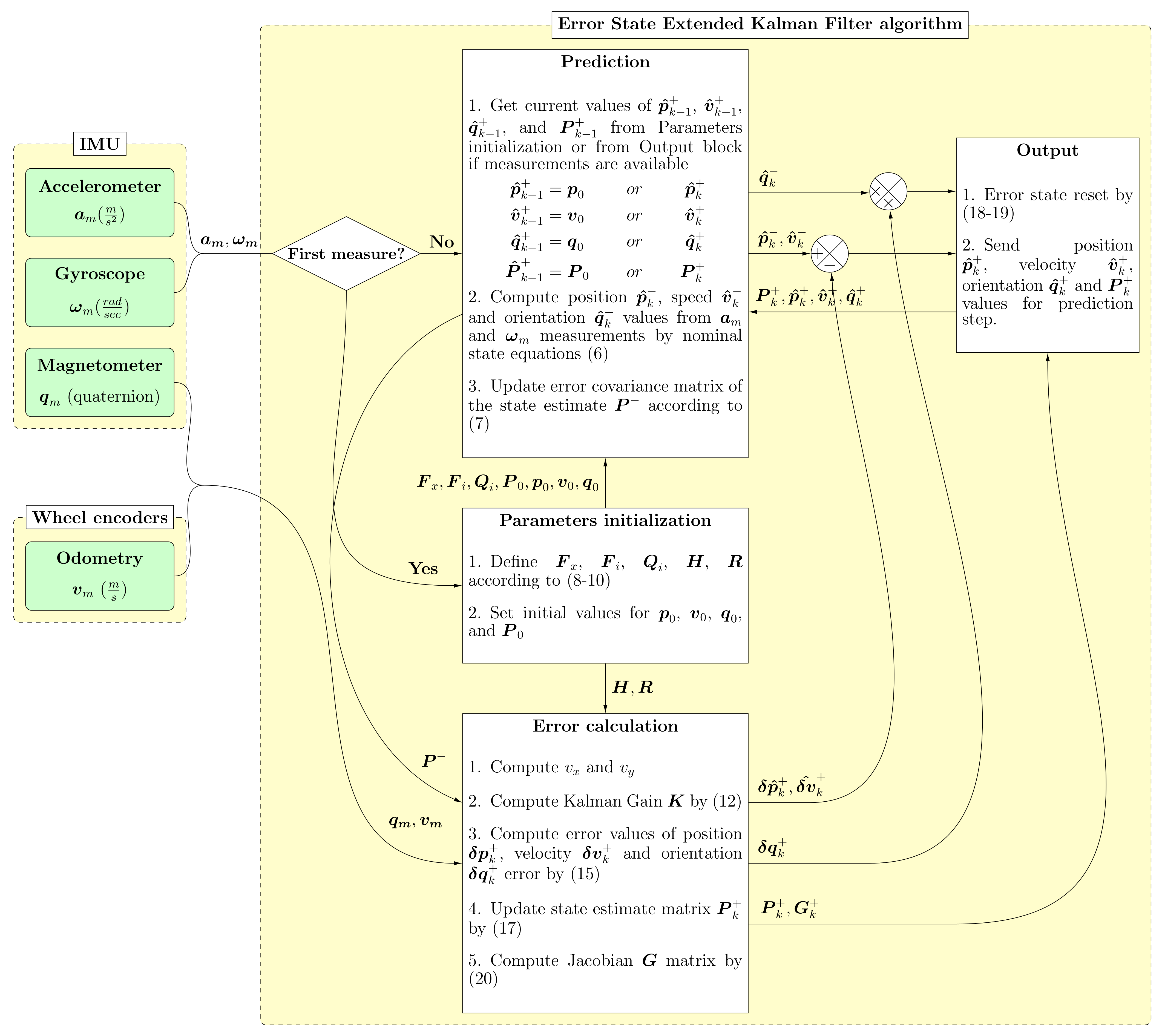
2.2. ES EKF with IMU and Encoder Data Fusion
2.3. Nominal State
2.4. Error State
2.5. ES EKF Prediction Step
2.6. ES EKF Measurement Update Step
2.7. ES EKF Error Reset
3. Simulation Results
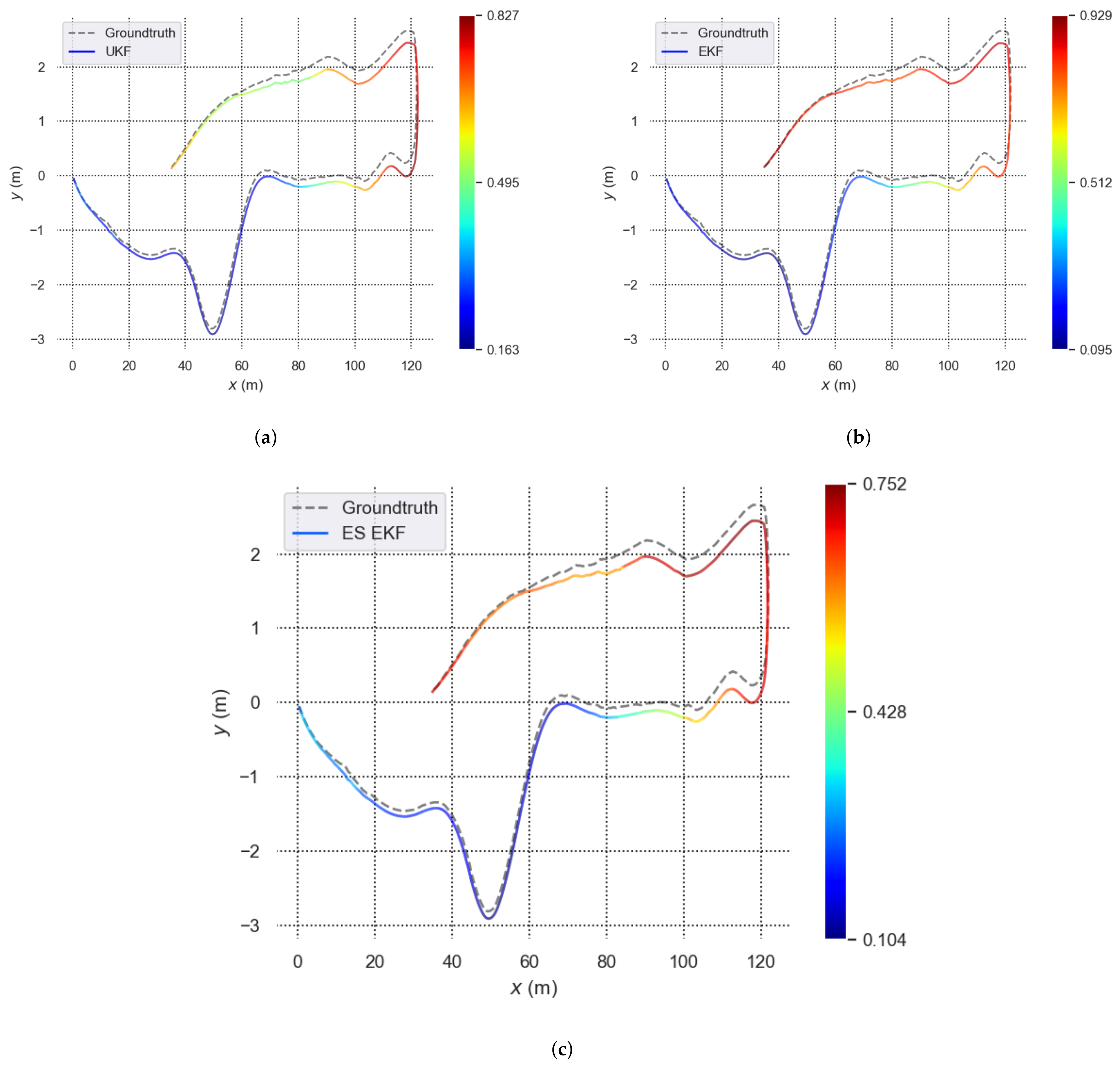
3.1. Magnetometer and Odometer Sensor Fusion
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| IMU | Inertial Measurement Units |
| EKF | Extended Kalman Filter |
| ES EKF | Error State Extended Kalman Filter |
| RMSE | Root Mean Square Error |
References
- Baek, J.; Park, J.; Cho, S.; Lee, C. 3D Global Localization in the Underground Mine Environment Using Mobile LiDAR Mapping and Point Cloud Registration. Sensors 2022, 22, 2873. [Google Scholar] [CrossRef]
- Vasilyeva, N.V.; Boikov, A.V.; Erokhina, O.O.; Trifonov, A.Y. Automated digitization of radial charts. J. Min. Inst. 2021, 247, 82–87. [Google Scholar] [CrossRef]
- Vasilyeva, N.; Fedorova, E.; Kolesnikov, A. Big Data as a Tool for Building a Predictive Model of Mill Roll Wear. Symmetry 2021, 13, 859. [Google Scholar] [CrossRef]
- Brilliant, L.S.; Zavialov, A.S.; Danko, M.U.; Andronov, K.A.; Shpurov, I.V.; Bratkova, V.G.; Davydov, A.V. Integration of machine learning methods and geological and hydrodynamic modeling in field development design (Russian). Neft. Khozyaystvo Oil Ind. 2022, 2022, 48–53. [Google Scholar] [CrossRef]
- Pshenin, V.; Liagova, A.; Razin, A.; Skorobogatov, A.; Komarovsky, M. Robot Crawler for Surveying Pipelines and Metal Structures of Complex Spatial Configuration. Infrastructures 2022, 7, 75. [Google Scholar] [CrossRef]
- Grishchenkova, E. Development of a Neural Network for Earth Surface Deformation Prediction. Geotech. Geol. Eng. 2018, 36, 1953–1957. [Google Scholar] [CrossRef]
- Men’Shikov, S.N.; Dzhaljabov, A.A.; Vasiliev, G.G.; Leonovich, I.A.; Ermilov, O.M. Spatial models developed using laser scanning at gas condensate fields in the northern construction-climatic zone. J. Min. Inst. 2019, 238, 430–437. [Google Scholar] [CrossRef] [Green Version]
- Mazakov, E.; Matrokhina, K.; Trofimets, V. Traffic management at the enterprises of the mineral industry. In Advances in Raw Material Industries for Sustainable Development Goals; CRC Press: Boca Raton, FL, USA, 2020; pp. 397–405. [Google Scholar]
- Kosarev, O.V.; Tcvetkov, P.S.; Makhovikov, A.B.; Vodkaylo, E.G.; Zulin, V.A.; Bykasov, D.A. Modeling of Industrial IoT complex for underground space scanning on the base of Arduino platform. In Topical Issues of Rational Use of Natural Resources: Proceedings of the International Forum-Contest of Young Researchers; CRC: New York, NY, USA, 2018; pp. 407–412. [Google Scholar]
- Trushko, V.L.; Protosenya, A.G. Prospects of geomechanics development in the context of new technological paradigm. J. Min. Inst. 2019, 236, 162–166. [Google Scholar] [CrossRef] [Green Version]
- Vystrchil, M.; Sukhov, A.; Novozhenin, S.; Popov, A.; Guba, S. Quality analysis of digital photogrammetric models obtained in low light conditions. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2020; Volume 1661, p. 012089. [Google Scholar]
- Gusev, V.; Puporevich, F. Improving accuracy of navigation using gyroscopes with regard to gyro drift and azimuth error. Min. Inf. Anal. Bull. (Sci. Tech. J.) 2021, 134–145. [Google Scholar] [CrossRef]
- Gusev, V.N.; Blishchenko, A.A.; Sannikova, A.P. Study of a set of factors influencing the error of surveying mine facilities using a geodesic quadcopter. J. Min. Inst. 2022, 254, 173–179. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Li, Y. Indoor navigation: State of the art and future trends. Satell. Navig. 2021, 2, 7. [Google Scholar] [CrossRef]
- He, X.; Pan, S.; Gao, W.; Lu, X. LiDAR-Inertial-GNSS Fusion Positioning System in Urban Environment: Local Accurate Registration and Global Drift-Free. Remote Sens. 2022, 14, 2104. [Google Scholar] [CrossRef]
- Mustafin, M.; Bykasov, D. Adjustment of Planned Surveying and Geodetic Networks Using Second-Order Nonlinear Programming Methods. Computation 2021, 9, 131. [Google Scholar] [CrossRef]
- Beloglazov, I.; Krylov, K. An Interval-Simplex Approach to Determine Technological Parameters from Experimental Data. Mathematics 2022, 10, 2959. [Google Scholar] [CrossRef]
- Chi, C.; Zhan, X.; Wang, S.; Zhai, Y. Enabling robust and accurate navigation for UAVs using real-time GNSS precise point positioning and IMU integration. Aeronaut. J. 2021, 125, 87–108. [Google Scholar] [CrossRef]
- Yang, J.; Lin, C.; You, B.; Yan, Y.; Cheng, T. Rtlio: Real-time lidar-inertial odometry and mapping for uavs. Sensors 2021, 21, 3955. [Google Scholar] [CrossRef]
- Rego, G.; Bazhenov, N.; Korzun, D. Trajectory Construction for Autonomous Robot Movement based on Sensed Physical Parameters and Video Data. In Proceedings of the 2021 30th Conference of Open Innovations Association FRUCT, Oulu, Finland, 27–29 October 2021; pp. 200–206. [Google Scholar] [CrossRef]
- Murthy, S.D.; Krishnan, S.; Sundarrajan, G.; Kassyap, K.S.; Bhagwanth, R.; Balasubramanian, V. A Robust Approach for Improving the Accuracy of IMU based Indoor Mobile Robot Localization. In Proceedings of the ICINCO 2016, Lisbon, Portugal, 29–31 July 2016; pp. 436–445. [Google Scholar]
- Binder, Y.I. Dead reckoning using an attitude and heading reference system based on a free gyro with equatorial orientation. Gyrosc. Navig. 2017, 8, 104–114. [Google Scholar] [CrossRef]
- Binder, Y.I.; Paderina, T.; Litmanovich, Y.A. Method errors of the dead reckoning schemes based on a single free gyroscope. Gyrosc. Navig. 2019, 10, 292–302. [Google Scholar] [CrossRef]
- Solà, J. Quaternion kinematics for the error-state Kalman filter. arXiv 2017, arXiv:1711.02508. [Google Scholar]
- Brossard, M.; Bonnabel, S. Learning Wheel Odometry and IMU Errors for Localization. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 291–297. [Google Scholar] [CrossRef] [Green Version]
- Lasmadi, L.; Kurniawan, F.; Dermawan, D.; Pratama, G.N. Mobile robot localization via unscented kalman filter. In Proceedings of the 2019 International Seminar on Research of Information Technology and Intelligent Systems (ISRITI), Yogyakarta, Indonesia, 5–6 December 2019; pp. 129–132. [Google Scholar]
- Ullah, I.; Shen, Y.; Su, X.; Esposito, C.; Choi, C. A localization based on unscented Kalman filter and particle filter localization algorithms. IEEE Access 2019, 8, 2233–2246. [Google Scholar] [CrossRef]
- Yang, C.; Shi, W.; Chen, W. Comparison of unscented and extended Kalman filters with application in vehicle navigation. J. Navig. 2017, 70, 411–431. [Google Scholar] [CrossRef]
- D’Alfonso, L.; Lucia, W.; Muraca, P.; Pugliese, P. Mobile robot localization via EKF and UKF: A comparison based on real data. Robot. Auton. Syst. 2015, 74, 122–127. [Google Scholar] [CrossRef]
- Roumeliotis, S.; Sukhatme, G.; Bekey, G. Circumventing dynamic modeling: Evaluation of the error-state Kalman filter applied to mobile robot localization. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–19 May 1999; Volume 2, pp. 1656–1663. [Google Scholar] [CrossRef]
- D’Adamo, T.; Phillips, T.; McAree, P. LiDAR-Stabilised GNSS-IMU Platform Pose Tracking. Sensors 2022, 22, 2248. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zhang, Y. Constrained ESKF for UAV Positioning in Indoor Corridor Environment Based on IMU and WiFi. Sensors 2022, 22, 391. [Google Scholar] [CrossRef] [PubMed]
- Vitali, R.V.; McGinnis, R.S.; Perkins, N.C. Robust error-state Kalman filter for estimating IMU orientation. IEEE Sens. J. 2020, 21, 3561–3569. [Google Scholar] [CrossRef]
- Youn, W.; Gadsden, S.A. Combined quaternion-based error state Kalman filtering and smooth variable structure filtering for robust attitude estimation. IEEE Access 2019, 7, 148989–149004. [Google Scholar] [CrossRef]
- Sun, W.; Wu, J.; Ding, W.; Duan, S. A robust indirect Kalman filter based on the gradient descent algorithm for attitude estimation during dynamic conditions. IEEE Access 2020, 8, 96487–96494. [Google Scholar] [CrossRef]
- Panich, S. Indirect Kalman Filter in Mobile Robot Application. J. Math. Stat. 2010, 6, 381–384. [Google Scholar] [CrossRef] [Green Version]
- Zunaidi, I.; Kato, N.; Nomura, Y.; Matsui, H. Positioning system for 4-wheel mobile robot: Encoder, gyro and accelerometer data fusion with error model method. CMU J. 2006, 5, 1–14. [Google Scholar]
- Lutonin, A.S.; Bogdanova, K.A. Development of a robotic platform for underground geomonitoring. News Tula State Univ. Tech. Sci. 2021, 12, 209–216. [Google Scholar]
- Gong, Z.; Ying, R.; Fei, W.; Qian, J.; Liu, P. Tightly Coupled Integration of GNSS and Vision SLAM Using 10-DoF Optimization on Manifold. IEEE Sens. J. 2019, 19, 12105–12117. [Google Scholar] [CrossRef]
- Cai, G.; Chen, B.M.; Lee, T.H. Unmanned Rotorcraft Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Scholte, W.J.; Rodrigo Marco, V.; Nijmeijer, H. Experimental Validation of Vehicle Velocity, Attitude and IMU Bias Estimation. IFAC-PapersOnLine 2019, 52, 118–123. [Google Scholar] [CrossRef]
- Diebel, J. Representing attitude: Euler angles, unit quaternions, and rotation vectors. Matrix 2006, 58, 1–35. Available online: https://www.astro.rug.nl/software/kapteyn/_downloads/fa29752e4cd69adcfa2fc03b1c020f4e/attitude.pdf (accessed on 19 January 2023).
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology; IET: London, UK, 2004; Volume 17. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 March 2009; Volume 3, p. 5. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 Sepetember–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Grupp, M. evo: Python Package for the Evaluation of Odometry and SLAM. 2017. Available online: https://github.com/MichaelGrupp/evo (accessed on 19 January 2023).
- Moore, T.; Stouch, D. A Generalized Extended Kalman Filter Implementation for the Robot Operating System. In Proceedings of the 13th International Conference on Intelligent Autonomous Systems (IAS-13), Padova, Italy, 15–18 July 2014; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
| Context | Item | Value | Unit |
|---|---|---|---|
| Platform wheelbase | L | m | |
| Robot speed limit | m/s | ||
| Linear acceleration RMSE | m/s | ||
| Angular velocity RMSE | rad/s | ||
| Magnetometer RMSE | T | ||
| Platform speed RMSE | m/s |
| Error | ES EKF | EKF | UKF |
|---|---|---|---|
| RMSE | 0.517 | 0.620 | 0.516 |
| Mean | 0.469 | 0.543 | 0.475 |
| Median | 0.570 | 0.679 | 0.512 |
| Min | 0.104 | 0.095 | 0.163 |
| Max | 0.752 | 0.929 | 0.827 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brigadnov, I.; Lutonin, A.; Bogdanova, K. Error State Extended Kalman Filter Localization for Underground Mining Environments. Symmetry 2023, 15, 344. https://doi.org/10.3390/sym15020344
Brigadnov I, Lutonin A, Bogdanova K. Error State Extended Kalman Filter Localization for Underground Mining Environments. Symmetry. 2023; 15(2):344. https://doi.org/10.3390/sym15020344
Chicago/Turabian StyleBrigadnov, Igor, Aleksandr Lutonin, and Kseniia Bogdanova. 2023. "Error State Extended Kalman Filter Localization for Underground Mining Environments" Symmetry 15, no. 2: 344. https://doi.org/10.3390/sym15020344
APA StyleBrigadnov, I., Lutonin, A., & Bogdanova, K. (2023). Error State Extended Kalman Filter Localization for Underground Mining Environments. Symmetry, 15(2), 344. https://doi.org/10.3390/sym15020344