


A Non-Second-Gradient Model for Nonlinear Electroelastic Bodies with Fibre Stiffness

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
“In doing this, we exclude effects due to fibre ’splay’ and fibre ’twist’, both of which feature in liquid crystal theory, but it is plausible that in fibre composite solids the major factor is fibre curvature.”
- (1)
- Require the existence of contact torques (which are not observed in actual nonpolar elastic solids reinforced by finite-radius fibres).
- (2)
- Introduce higher-order differential equations in the corresponding boundary value problem.
2. Preliminaries
2.1. Deformation
2.2. Electrostatics
3. Embedded Fibres
4. Total Energy Function
4.1. Spectral Invariants
4.2. Spectral Derivative Components
5. Strain Energy Prototype
6. Boundary Value Problem
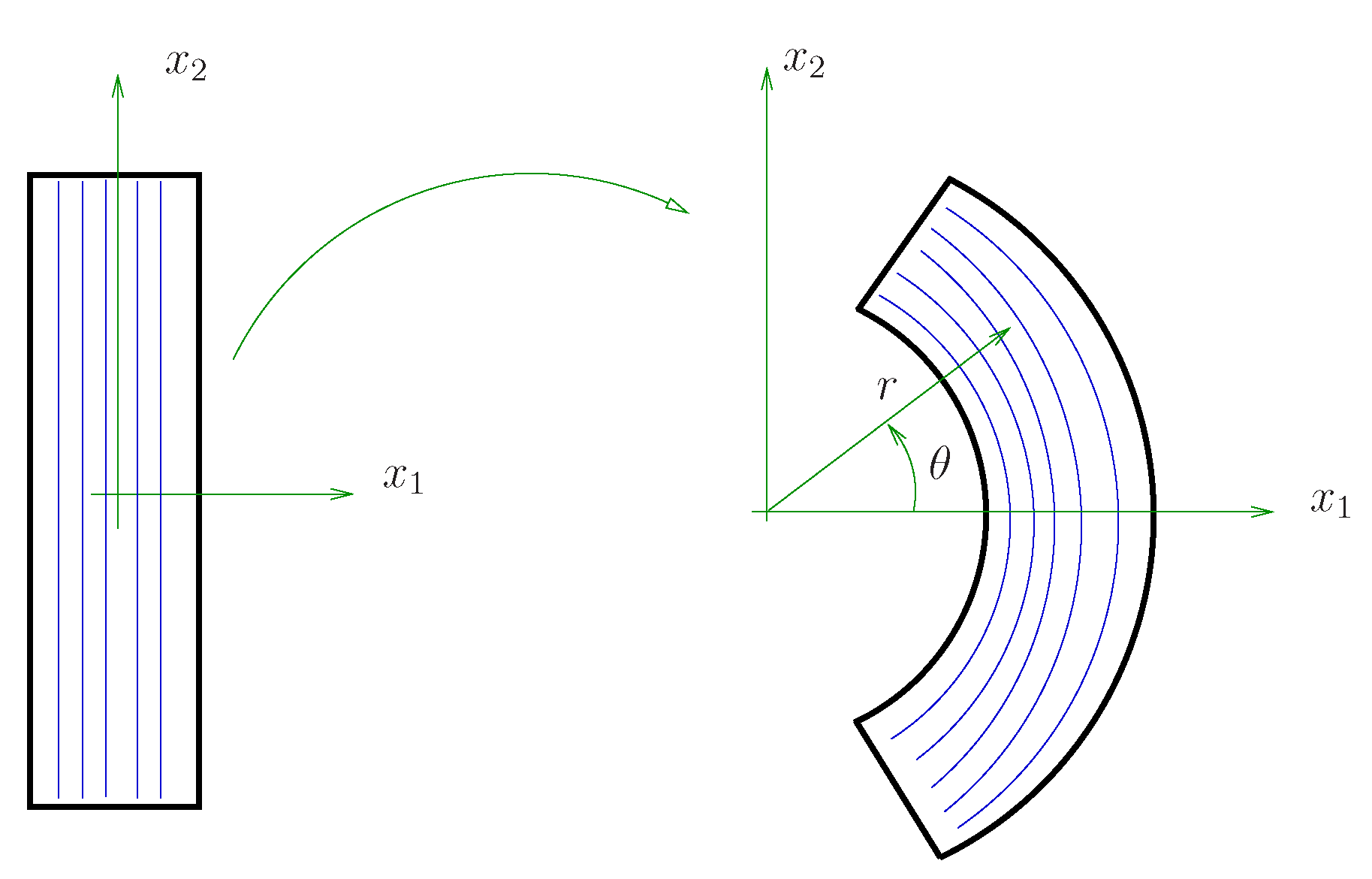
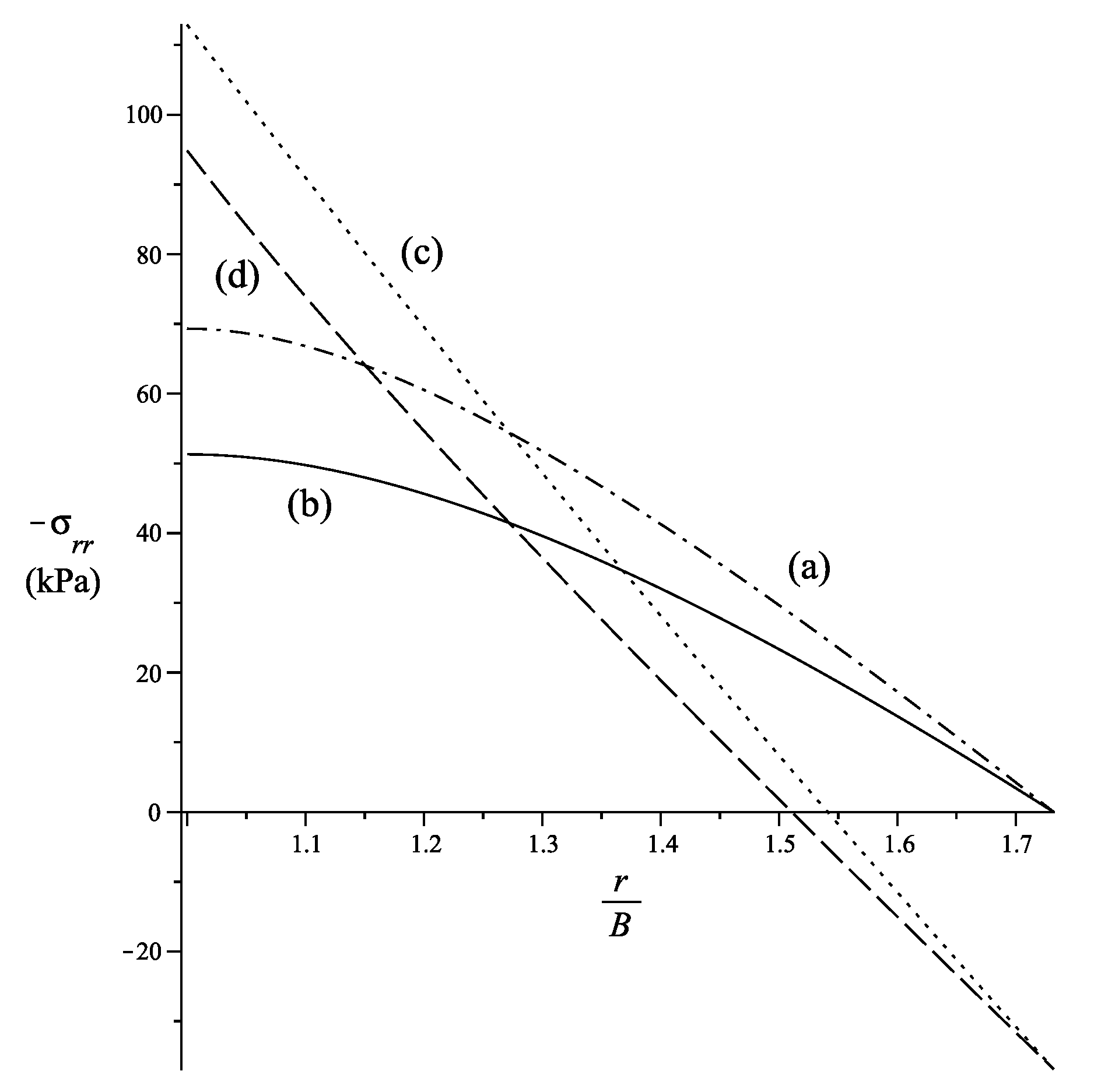
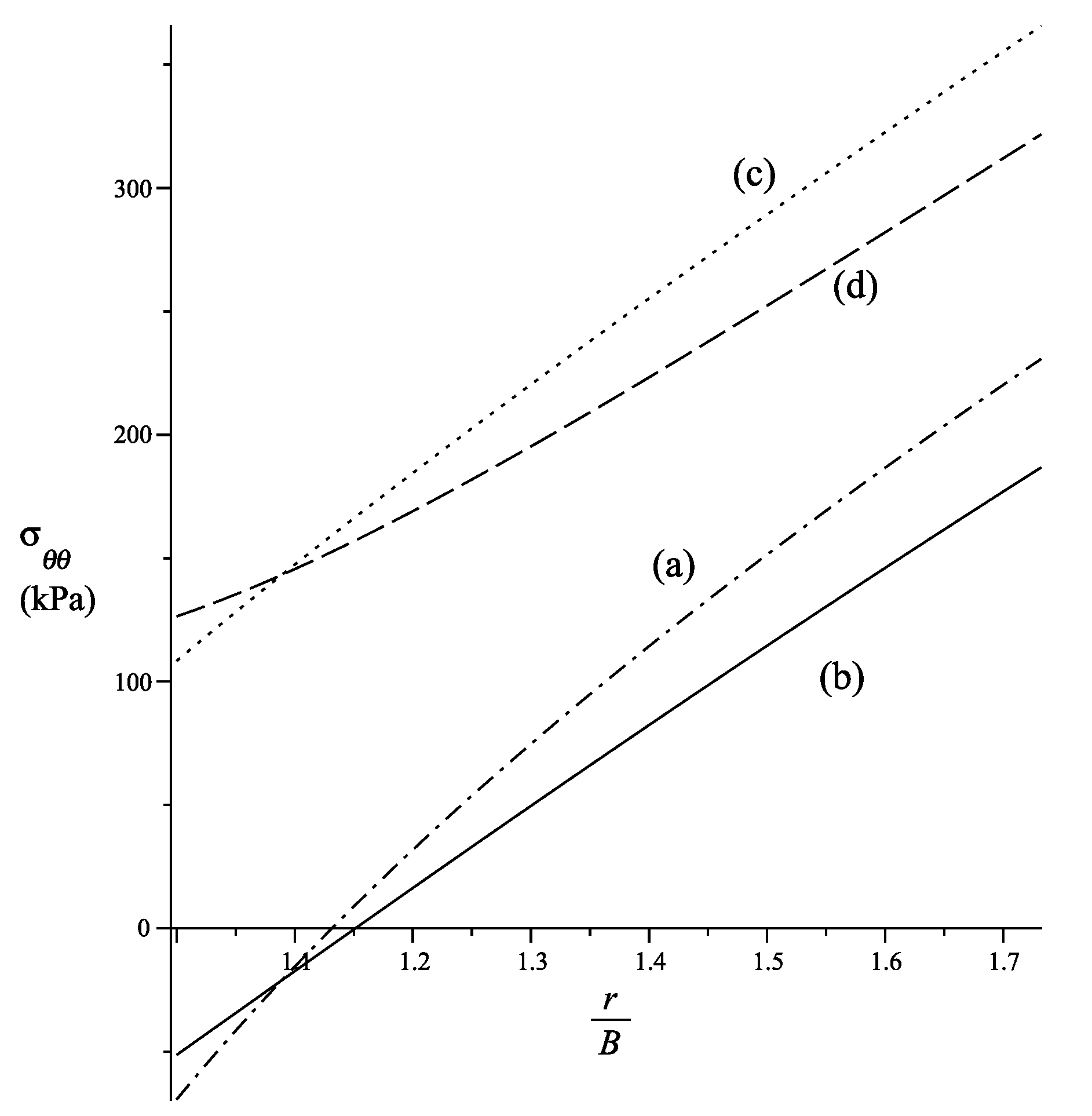
6.1. Pure Bending
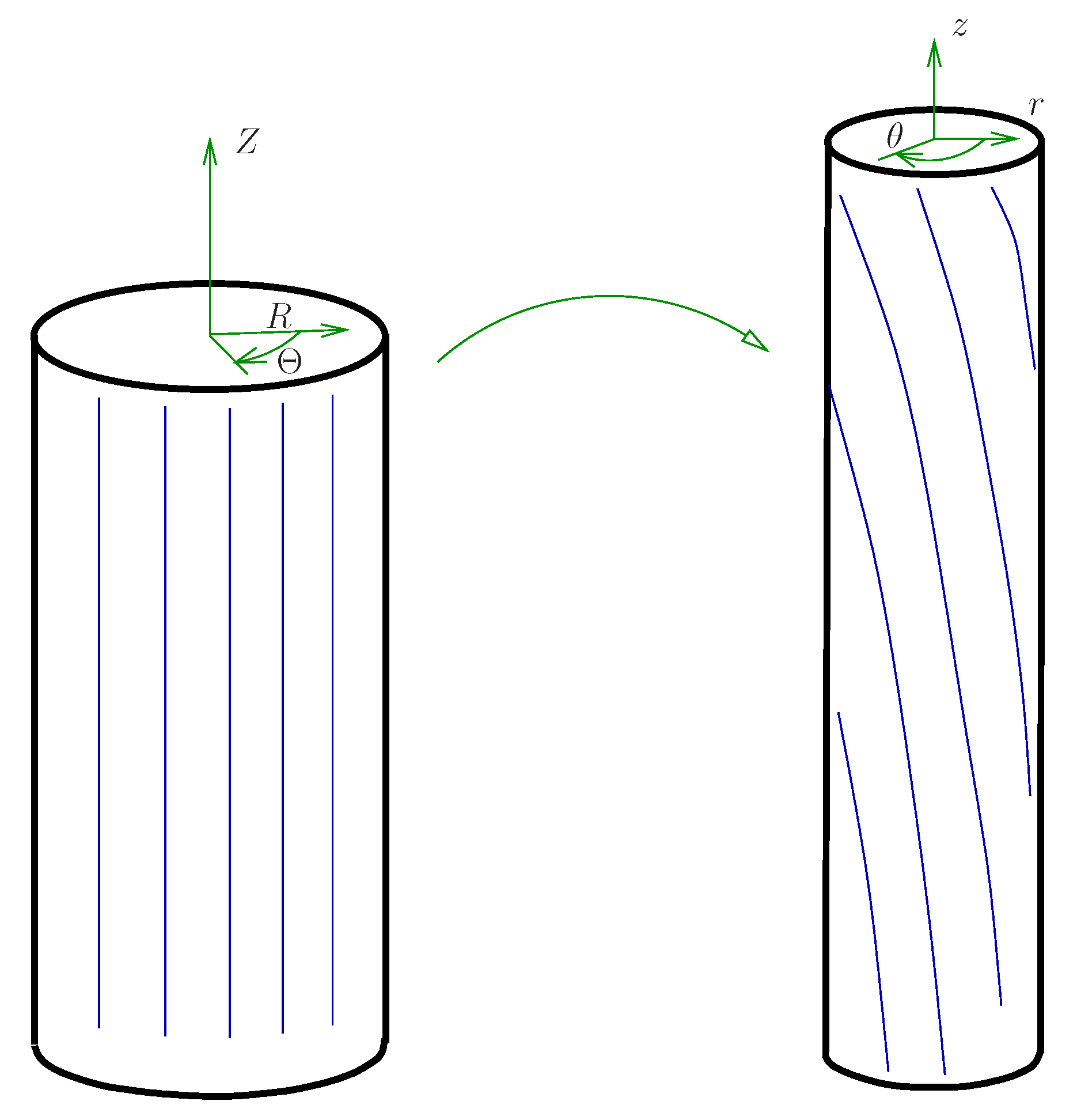
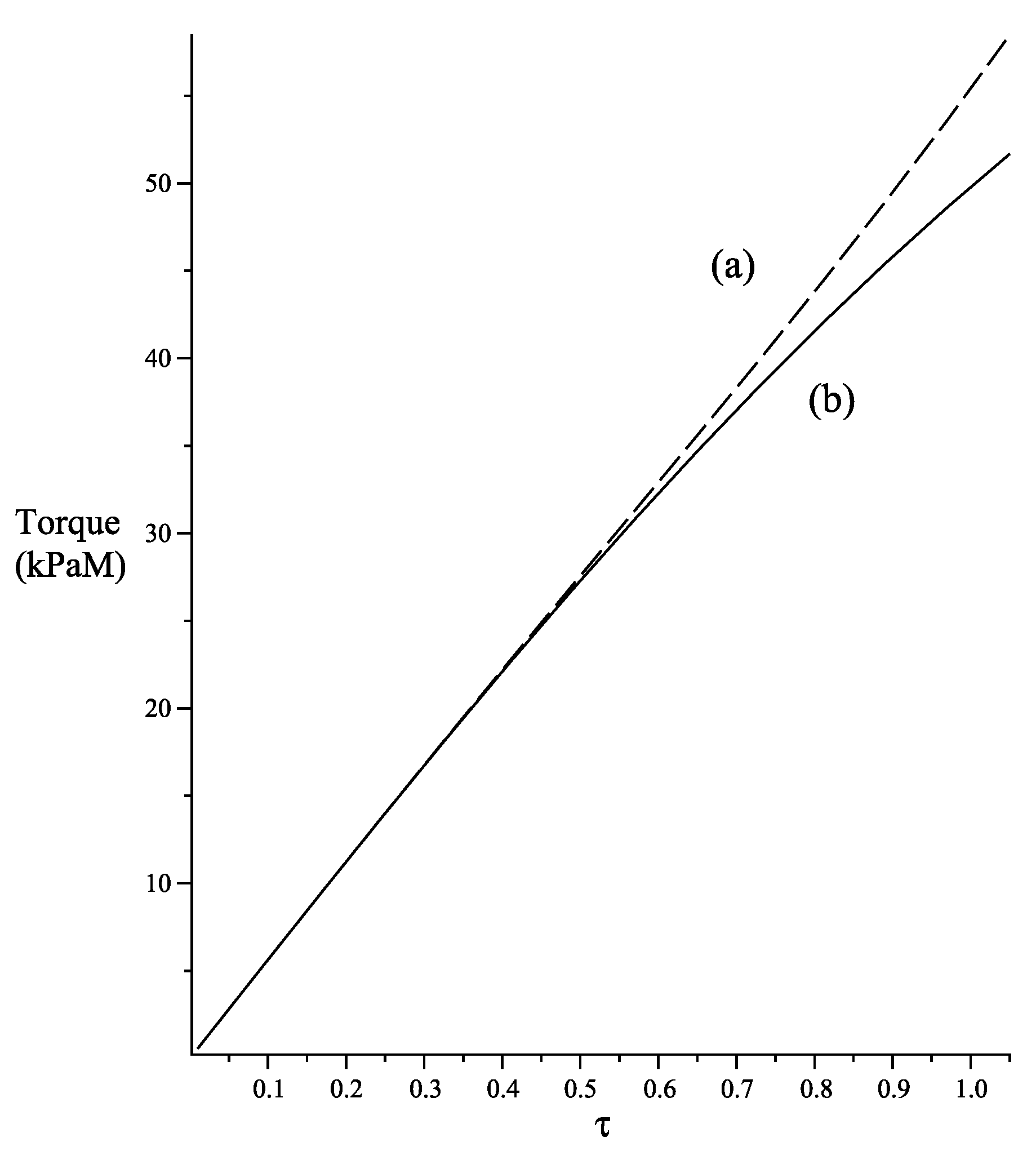
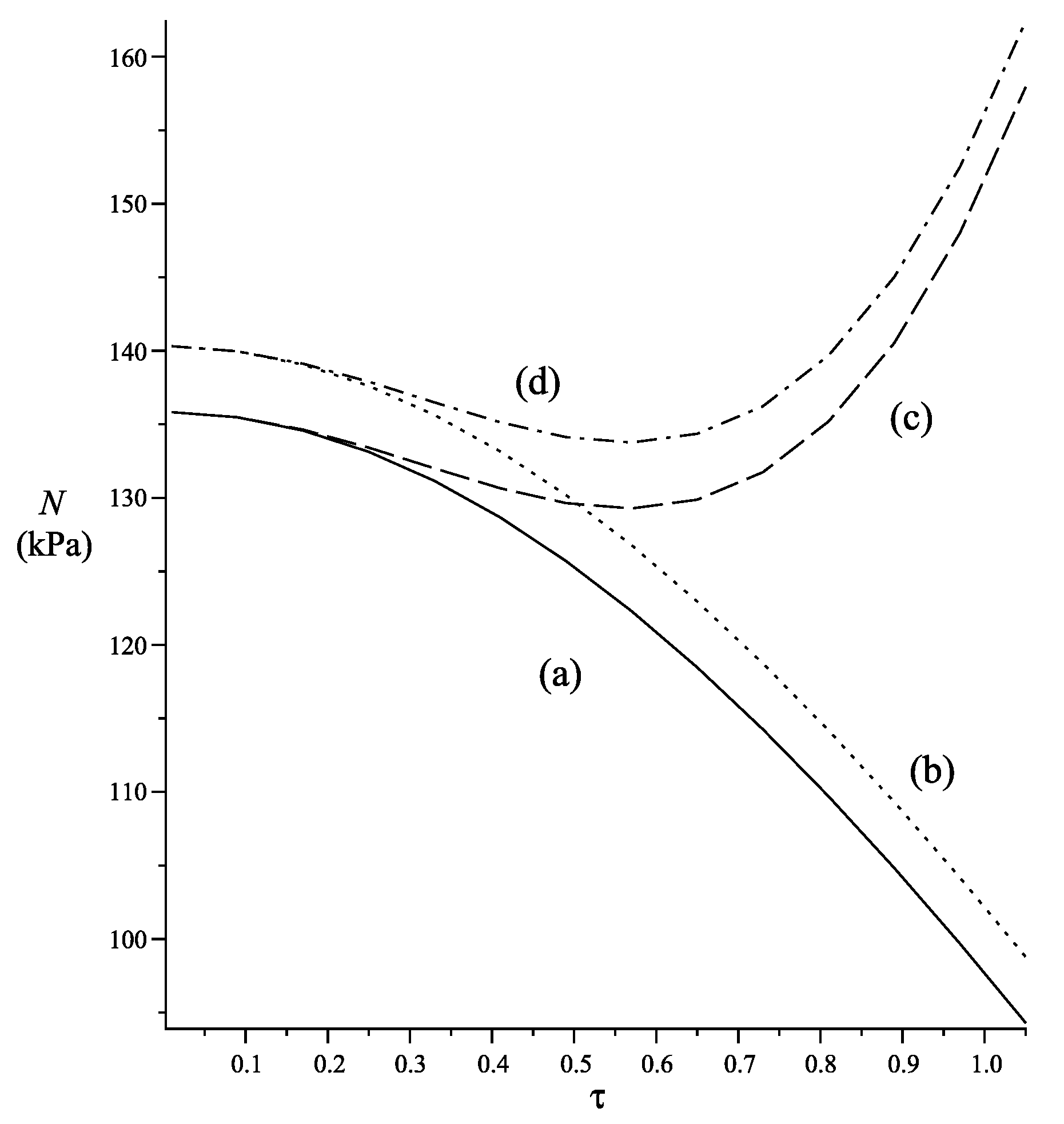
6.2. Torsion and Extension of a Cylinder
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Wu, Z.; Lin, B.; Fan, J.; Zhao, J.; Zhang, Q.; Li, L. Effect of Dielectric Relaxation of Epoxy Resin on Dielectric Loss of Medium-Frequency Transformer. IEEE Trans. Dielectr. Electr. Insul. 2022, 29, 1651–1658. [Google Scholar] [CrossRef]
- Huang, Z.; Luo, P.; Zheng, H.; Lyu, Z.; Ma, X. Novel one-dimensional V3S4@NC nanofibers for sodium-ion batteries. J. Phys. Chem. Solids 2023, 172, 111081. [Google Scholar] [CrossRef]
- Cao, K.; Wang, B.; Ding, H.; Lv, L.; Dong, R.; Cheng, T.; Gong, F. Improving Physical Layer Security of Uplink NOMA via Energy Harvesting Jammers. IEEE Trans. Inf. Forensics Secur. 2021, 16, 786–799. [Google Scholar] [CrossRef]
- Song, Z.; Shao, X.; Wu, W.; Liu, Z.; Yang, M.; Liu, M.; Wang, H. Structures and Stabilities of Carbon Chain Clusters Influenced by Atomic Antimony. Molecules 2023, 28, 1358. [Google Scholar] [CrossRef] [PubMed]
- Shi, M.; Wang, R.; Li, L.; Chen, N.; Xiao, P.; Yan, C.; Yan, X. Redox-Active Polymer Integrated with MXene for Ultra-Stable and Fast Aqueous Proton Storage. Adv. Funct. Mater. 2022, 33, 2209777. [Google Scholar] [CrossRef]
- Xiao, X.; Zhang, Q.; Zheng, J.; Li, Z.; Yan, X. Analytical model for the nonlinear buckling responses of the confined polyhedral FGP-GPLs lining subjected to crown point loading. Eng. Struct. 2023, 282, 115780. [Google Scholar] [CrossRef]
- Bar-Cohen, Y. Electro-active polymers: Current capabilities and challenges. In Proceedings of the 4th Electroactive Polymer Actuators and Devices (EAPAD) Conference, 9th Smart Structures and Materials Symposium, San Diego, CA, USA, 11 July 2002. [Google Scholar]
- Chukov, D.; Nematulloev, S.; Zadorozhnyy, M.; Tcherdyntsev, V.; Stepashkin, A.; Zherebtsov, D. Structure, mechanical and thermal properties of polyphenylene sulfide and polysulfone impregnated carbon fiber composites. Polymers 2019, 11, 684. [Google Scholar] [CrossRef]
- Linul, E.; Lell, D.; Movahedi, N.; Codrean, C.; Fiedler, T. Compressive properties of Zinc Syntactic Foams at elevated temperatures. Compos. Part B Eng. 2019, 167, 122–134. [Google Scholar] [CrossRef]
- Sherif, G.; Chukov, D.; Tcherdyntsev, V.; Torokhov, V. Effect of formation route on the mechanical properties of the polyethersulfone composites reinforced with glass fibers. Polymers 2019, 11, 1364. [Google Scholar] [CrossRef]
- Yashas Gowda, T.G.; Sanjay, M.R.; Subrahmanya Bhat, K.; Madhu, P.; Senthamaraikannan, P.; Yogesha, B. Polymer matrix-natural fiber composites: An overview. Cogent. Eng. 2018, 5, 1446667. [Google Scholar] [CrossRef]
- Clyne, T.W.; Hull, D. An Introduction to Composite Materials, 3rd ed.; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Monteiro, S.N.; de Assis, F.S.; Ferreira, C.L.; Simonassi, N.T.; Weber, R.P.; Oliveira, M.S.; Colorado, H.A.; Pereira, A.C. Fique fabric: A promising reinforcement for polymer composites. Polymers 2018, 10, 246. [Google Scholar] [CrossRef] [PubMed]
- Movahedi, N.; Linul, E. Quasi-static compressive behavior of the ex-situ aluminum-alloy foam-filled tubes under elevated temperature conditions. Mater. Lett. 2017, 206, 182–184. [Google Scholar] [CrossRef]
- Zagho, M.M.; Hussein, E.A.; Elzatahry, A.A. Recent overviews in functional polymer composites for biomedical applications. Polymers 2018, 10, 739. [Google Scholar] [CrossRef] [PubMed]
- Gizzi, A.; Ruiz-Baier, R.; Rossi, S.; Laadhari, A.; Cherubini, C.; Filippi, S. A three-dimensional continuum model of active contraction in single cardiomyocytes. In Modeling the Heart and the Circulatory System; Springer International Publishing: Cham, Switzerland, 2015; pp. 157–176. [Google Scholar] [CrossRef]
- Shariff, M.H.B.M. Physical invariant strain energy function for passive myocardium. J. Biomech. Model. Mechanobiol. 2012, 12, 215–223. [Google Scholar] [CrossRef]
- Shariff, M.H.B.M. On the spectral constitutive modelling of transversely isotropic soft tissue: Physical invariants. Int. J. Eng. Sci. 2017, 120, 199–219. [Google Scholar] [CrossRef]
- Shariff, M.H.B.M.; Bustamante, R.; Merodio, J. A nonlinear electro- elastic model with residual stresses and a preferred direction. Math. Mech. Solids 2020, 25, 838–865. [Google Scholar] [CrossRef]
- Shariff, M.H.B.M.; Bustamante, R.; Merodio, J. A nonlinear con- stitutive model for a two preferred direction electro-elastic body with residual. Int. J.-Non-Linear Mech. 2020, 119, 103352. [Google Scholar] [CrossRef]
- Ferreti, M.; Madeo, A.; Dell’isola, F.; Boisse, P. Modeling the onset of shear boundary layers in fibrous composite reinforcements by second gradient theory. Z. Angew. Math. Phys. 2013, 65, 587–612. [Google Scholar] [CrossRef]
- Pipkin, A.C. Stress analysis for fiber-reinforced materials. Adv. Appl. Mech. 1979, 19, 1–51. [Google Scholar]
- Shariff, M.H.B.M.; Merodio, J. Residually stressed fiber reinforced solids: A spectral approach. Materials 2020, 13, 4076. [Google Scholar] [CrossRef]
- Spencer, A.J.M. Deformations of Fibre-Reinforced Materials; Oxford University Press: Oxford, UK, 1972. [Google Scholar]
- Shariff, M.H.B.M.; Merodio, J.; Bustamante, R. Finite deformations of fibre bending stiffness: A spectral approach. J. Appl. Comput. Mech. 2022, 8, 1332–1342. [Google Scholar]
- Shariff, M.H.B.M.; Merodio, J.; Bustamante, R. Nonlinear elastic constitutive relations of residually stressed composites with stiff curved fibres. Appl. Math. Mech. 2022, 43, 1515–1530. [Google Scholar] [CrossRef]
- Soldatos, K.P.; Shariff, M.H.B.M.; Merodio, J. On the Constitution of Polar Fibre-reinforced Materials. Mech. Adv. Mater. Struct. 2020, 28, 2255–2266. [Google Scholar] [CrossRef]
- Spencer, A.J.M.; Soldatos, K.P. Finite deformations of fibre-reinforced elastic solids with fibre bending stiffness. Int. J.-Non-Linear Mech. 2007, 42, 355–368. [Google Scholar] [CrossRef]
- Steigmann, D. Theory of elastic solids reinforced with fibers resistant to extension, flexure and twist. Int. J. Non-Linear Mech. 2012, 47, 734–742. [Google Scholar] [CrossRef]
- Hadjesfandiari, A.R.; Dargush, G.F. Couple stress theory for solids. Int. J. Solids Struct. 2011, 48, 2496–2510. [Google Scholar] [CrossRef]
- Hadjesfandiari, A.R.; Dargush, G.F. Evolution of generalized couple-stress continuum theories:a critical analysis. arXiv 2015, arXiv:1501.03112. [Google Scholar]
- Neff, P.; Münch, I.; Ghiba, I.; Madeo, A. On some fundamental misunderstandings in the indeterminate couple stress model. A comment on recent papers of A.R. Hadjesfandiari and G.F. Dargush. Int. J. Solids Struct. 2016, 81, 233–243. [Google Scholar] [CrossRef]
- Shariff, M.H.B.M. A generalized strain approach to anisotropic elasticity. Sci. Rep. 2022, 12, 172. [Google Scholar] [CrossRef]
- Shariff, M.H.B.M.; Bustamante, R.; Hossain, M. A Generalised Time-Dependent Mathematical Formulation for Magnetoelectrically Coupled Soft Solids at Finite Strains. Symmetry 2023, 15, 628. [Google Scholar] [CrossRef]
- Dorfmann, A.; Ogden, R.W. Nonlinear electroelasticity. Acta Mech. 2005, 174, 167–183. [Google Scholar] [CrossRef]
- Kovetz, A. Electromagnetic Theory; Oxford University Press: Oxford, UK, 2000. [Google Scholar]
- Ogden, R.W.; Steigmann, D.J. Mechanics and Electrodynamics of Magneto- and Electro-Elastic Materials; Springer: Wien, Austria, 2011; Volume 527, CISM Courses and Lectures Series. [Google Scholar]
- Shariff, M.H.B.M.; Merodio, J.; Bustamante, R. A non-second-gradient model for nonlinear elastic bodies with fibre stiffness. Sci. Rep. 2023, 13, 6562. [Google Scholar] [CrossRef] [PubMed]
- Shariff, M.H.B.M. Anisotropic separable free energy functions for elastic and non-elastic solids. Acta Mech. 2016, 227, 3213–3237. [Google Scholar] [CrossRef]
- Shariff, M.H.B.M. On the Smallest Number of Functions Representing Isotropic Functions of Scalars, Vectors and Tensors. Q. J. Mech. Appl. Math. 2023. [Google Scholar] [CrossRef]
- Morrow, D.A.; Donahue, T.L.H.; Odegard, G.M.; Kaufman, K.R. Transversely isotropic tensile material properties of skeletal muscle tissue. J. Mech. Behav. Biomed. Mater. 2010, 3, 124–129. [Google Scholar] [CrossRef]
- Mathieu, S.; Hamila, N.; Bouillon, F.; Boisse, P. Enhanced modeling of 3D composite preform deformations taking into account local fiber bending stiffness. Compos. Sci. Technol. 2015, 117, 322–333. [Google Scholar] [CrossRef]
- Lu, W.-Y.; Jin, H.; Foul, J.W.; Ostien, J.; Kramer, S.L.; Jones, A. Solid cylinder torsion for large shear deformation and failure of engineering materials. Exp. Mech. 2021, 61, 307–320. [Google Scholar] [CrossRef]
- Laadhari, A.; Saramito, P.; Misbah, C.; Székely, G. Fully implicit methodology for the dynamics of biomembranes and capillary interfaces by combining the level set and Newton methods. J. Comput. Phys. 2017, 343, 271–299. [Google Scholar] [CrossRef]
- Laadhari, A.; Székely, G. Fully implicit finite element method for the modeling of free surface flows with surface tension effect. Int. J. Numer. Methods Eng. 2017, 111, 1047–1074. [Google Scholar] [CrossRef]
- Laadhari, A. Implicit finite element methodology for the numerical modeling of incompressible two-fluid flows with moving hyperelastic interface. Appl. Math. Comput. 2018, 333, 376–400. [Google Scholar] [CrossRef]
- Ogden, R.W. Non-Linear Elastic Deformations; Ellis Horwood: Chichester, UK, 1984. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shariff, M.H.B.M.; Merodio, J.; Bustamante, R.; Laadhari, A. A Non-Second-Gradient Model for Nonlinear Electroelastic Bodies with Fibre Stiffness. Symmetry 2023, 15, 1065. https://doi.org/10.3390/sym15051065
Shariff MHBM, Merodio J, Bustamante R, Laadhari A. A Non-Second-Gradient Model for Nonlinear Electroelastic Bodies with Fibre Stiffness. Symmetry. 2023; 15(5):1065. https://doi.org/10.3390/sym15051065
Chicago/Turabian StyleShariff, Mohd Halim Bin Mohd, Jose Merodio, Roger Bustamante, and Aymen Laadhari. 2023. "A Non-Second-Gradient Model for Nonlinear Electroelastic Bodies with Fibre Stiffness" Symmetry 15, no. 5: 1065. https://doi.org/10.3390/sym15051065
APA StyleShariff, M. H. B. M., Merodio, J., Bustamante, R., & Laadhari, A. (2023). A Non-Second-Gradient Model for Nonlinear Electroelastic Bodies with Fibre Stiffness. Symmetry, 15(5), 1065. https://doi.org/10.3390/sym15051065