

State Feedback Controller Design for a Class of Generalized Proportional Fractional Order Nonlinear Systems

 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and System Description
- -
- The GFPI:
- -
- The GPFD:where .
3. State Feedback Controller Design for Lipschitz Fractional Order Nonlinear System
4. State Feedback Controller Design for OSL Fractional Order Nonlinear System
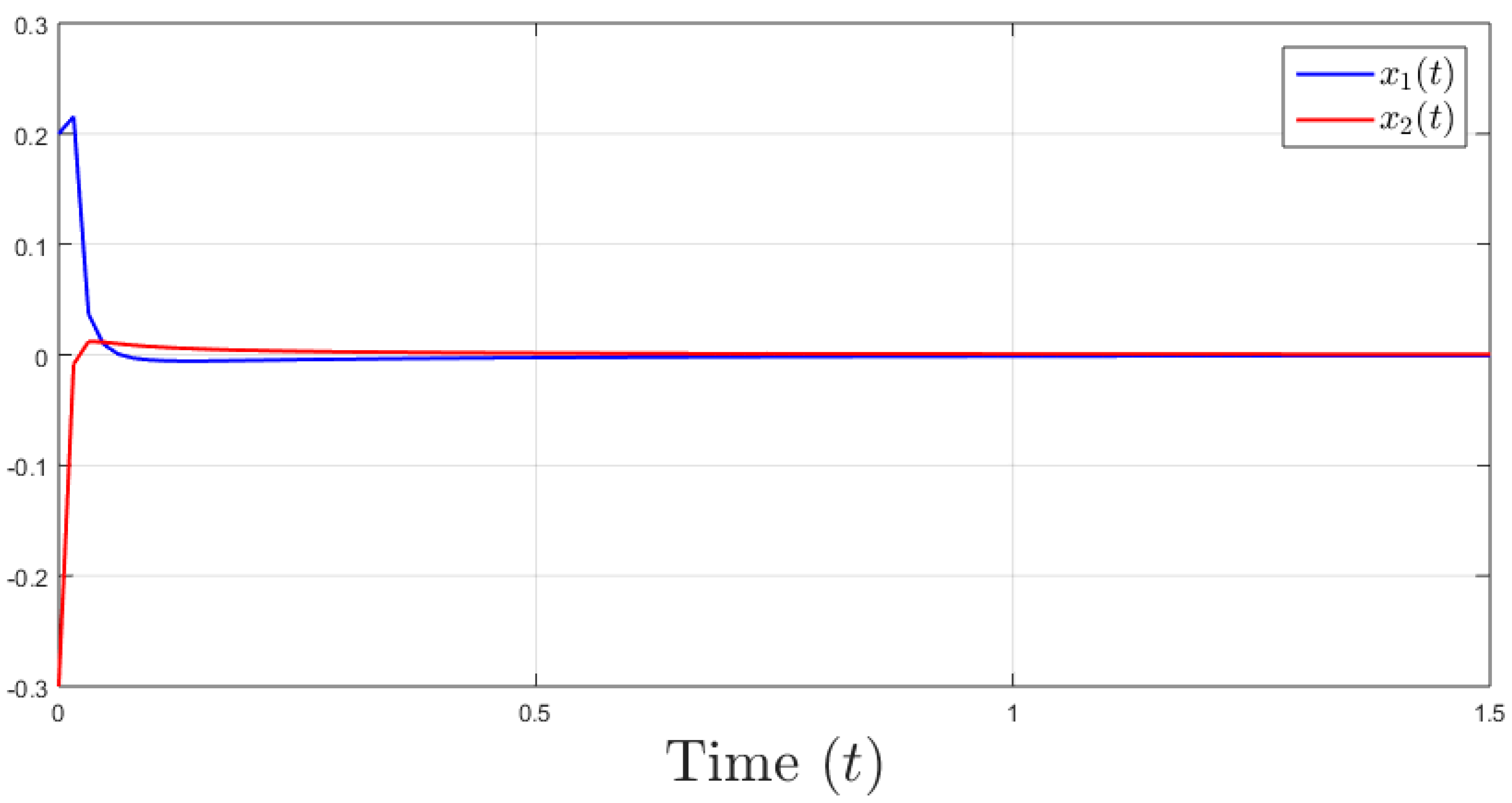
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jarad, F.; Abdeljawad, T.; Alzabut, J. Generalized fractional derivatives generated by a class of local proportional derivatives. Eur. Phys. J. Spec. Top. 2017, 226, 3457–3471. [Google Scholar] [CrossRef]
- Alzabut, J.; Abdeljawad, T.; Jarad, F.; Sudsutad, W. A Gronwall inequality via the generalized proportional fractional derivative with applications. Inequalities 2019, 2019, 101. [Google Scholar] [CrossRef]
- Xu, Y.; Yu, J.; Li, W.; Feng, J. Global asymptotic stability of fractional-order competitive neural networks with multiple time-varying-delay links. Appl. Math. Comput. 2021, 389, 125498. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, B. New fractional derivatives with non-local and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef]
- Rashid, S.; Jarad, F.; Hammouch, Z. Some new bounds analogous to generalized proportional fractional integral operator with respect to another function. Discret. Contin. Dyn. Syst. Ser. S 2021, 14, 3703–3718. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, Y.; Zhang, X. State-feedback stabilization control of nonlinear systems via adaptive dynamic programming and feedback linearization. Int. J. Control. 2019, 95, 751–761. [Google Scholar]
- Elias, L.J.; Faria, F.A.; Magossi, R.F.; Oliveira, V.A. Switched control design for nonlinear systems using state feedback. J. Control. Autom. Electr. Syst. 2022, 33, 733–742. [Google Scholar] [CrossRef]
- Gao, S.; Zhao, D.; Yan, X.; Spurgeon, S.K. Model-Free Adaptive State Feedback Control for a Class of Nonlinear Systems. In IEEE Transactions on Automation Science and Engineering; IEEE: Piscataway, NJ, USA, 2023. [Google Scholar]
- Golestani, M.; Mobayen, S.; HosseinNia, S.H.; Shamaghdari, S. An LMI approach to nonlinear state-feedback stability of uncertain time-delay systems in the presence of Lipschitzian nonlinearities. Symmetry 2020, 12, 1883. [Google Scholar] [CrossRef]
- Alimhan, K.; Mamyrbayev, O.J.; Abdenova, G.A.; Akmetkalyeva, A. Output tracking control for high-order nonlinear systems with time delay via output feedback design. Symmetry 2021, 13, 675. [Google Scholar] [CrossRef]
- Krokavec, D.; Filasova, A. On the Separation Principle in Dynamic Output Controller Design for Uncertain Linear Systems. Symmetry 2022, 14, 2239. [Google Scholar] [CrossRef]
- Yin, C.; Zhong, S.; Chen, W. Design of sliding mode controller for a class of fractional-order chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 356–366. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Robust adaptive backstepping control of uncertain fractional-order nonlinear systems with input time delay. Math. Comput. Simul. 2022, 196, 251–272. [Google Scholar] [CrossRef]
- Li, L.; Sun, Y. Adaptive Fuzzy Control for Nonlinear Fractional-Order Uncertain Systems with Unknown Uncertainties and External Disturbance. Entropy 2015, 17, 5580–5592. [Google Scholar] [CrossRef]
- Lei, T.; Mao, B.; Zhou, X.; Fu, H. Dynamics Analysis and Synchronous Control of Fractional-Order Entanglement Symmetrical Chaotic Systems. Symmetry 2021, 13, 1996. [Google Scholar] [CrossRef]
- Guo, Y.; Li, Y. Bipartite leader-following synchronization of fractional-order delayed multilayer signed networks by adaptive and impulsive controllers. Appl. Math. Comput. 2022, 430, 127243. [Google Scholar] [CrossRef]
- Hairer, E.; Norsett, S.P.; Wanner, G. Solving Ordinary Differntial Equations II: Stiff and DAE Problems; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Dekker, K.; Verwer, J.G. Stability of Runge-Kutta Methods for Stiff Nonlinear Differetial Equations; North-Holland: Amsterdam, The Netherlands, 1984. [Google Scholar]
- Dong, Y.; Liu, W.; Liang, S. Nonlinear observer design for one-sided Lipschitz systems with time-varying delay and uncertainties. Int. J. Robust Nonlinear Control 2017, 27, 1974–1998. [Google Scholar] [CrossRef]
- Khosrowjerdi, M.J.; Barzegary, S. Fault tolerant control using virtual actuator for continuous-time Lipschitz nonlinear systems. Int. J. Robust Nonlinear Control 2014, 24, 2597–2607. [Google Scholar] [CrossRef]
- Almeida, R.; Agarwal, R.P.; Hristova, S.; O’Regan, D. Quadratic Lyapunov Functions for Stability of the Generalized Proportional Fractional Differential Equations with Applications to Neural Networks. Axioms 2021, 10, 322. [Google Scholar] [CrossRef]
- Agarwal, R.; Hristova, S.; O’Regan, D. Stability of Generalized Proportional Caputo Fractional Differential Equations by Lyapunov Functions. Fractal Fract. 2022, 6, 34. [Google Scholar] [CrossRef]
- Yadegar, M.; Afshar, A.; Davoodi, M. Observer-based tracking controller design for a class of Lipschitz nonlinear systems. J. Vib. Control. 2018, 24, 2112–2119. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsharif, A.O.M.; Jmal, A.; Naifar, O.; Ben Makhlouf, A.; Rhaima, M.; Mchiri, L. State Feedback Controller Design for a Class of Generalized Proportional Fractional Order Nonlinear Systems. Symmetry 2023, 15, 1168. https://doi.org/10.3390/sym15061168
Alsharif AOM, Jmal A, Naifar O, Ben Makhlouf A, Rhaima M, Mchiri L. State Feedback Controller Design for a Class of Generalized Proportional Fractional Order Nonlinear Systems. Symmetry. 2023; 15(6):1168. https://doi.org/10.3390/sym15061168
Chicago/Turabian StyleAlsharif, Ali Omar M., Assaad Jmal, Omar Naifar, Abdellatif Ben Makhlouf, Mohamed Rhaima, and Lassaad Mchiri. 2023. "State Feedback Controller Design for a Class of Generalized Proportional Fractional Order Nonlinear Systems" Symmetry 15, no. 6: 1168. https://doi.org/10.3390/sym15061168
APA StyleAlsharif, A. O. M., Jmal, A., Naifar, O., Ben Makhlouf, A., Rhaima, M., & Mchiri, L. (2023). State Feedback Controller Design for a Class of Generalized Proportional Fractional Order Nonlinear Systems. Symmetry, 15(6), 1168. https://doi.org/10.3390/sym15061168