1. Introduction and Preliminaries
Space curves are one of the most important topics of differential geometry. Curves are characterized by the Frenet frame, which consists of tangent, principal normal, and binormal vectors. However, the Frenet frame is defined only for differentiable curves, and the second derivative of curves can be zero at some points. Because of this, for a more thorough examination of the curve, an alternative to the Frenet frame, known as the Bishop frame, was introduced by Bishop in 1975 [
1]. The Bishop frame has been used in biology and has spread to fields such as computer graphics. It is used to predict the structural information of DNA helices and to control virtual cameras in computer graphics. This alternative frame, associated with parallel vector fields and also known as the alternative or parallel frame, is obtained without changing the tangent vector on the Frenet frame and by rotating the principal normal and binormal vectors at an angle. The characterizations of curves using the Bishop frame were obtained in [
2,
3,
4]. Later, a new version of the Bishop frame called the “Type-2 Bishop Frame” was defined by [
5]. This other alternative frame, also referred to as the parallel frame, is derived by rotating the tangent and principal normal at an angle while keeping the binormal vector unchanged from the Frenet frame. Subsequently, the characterizations of curves according to the type-2 Bishop frame were studied in [
4,
5,
6,
7].
Ruled surfaces are defined as surfaces formed by a one-parameter family of straight lines in Euclidean space. The well-known examples of these surfaces are cylinder and conical surfaces. Their unique geometric properties make them a versatile tool with extensive applications across various engineering disciplines such as manufacturing technology, computer-aided geometric design (CAGD), simulation, rigid body Dynamics, and modern engineering practices [
8,
9,
10]. Izumiya and Takeuchi’s studies on ruled surfaces represent a significant contribution to the field of geometry [
11,
12,
13,
14]. Moreover, many researchers have studied different curves on ruled surfaces in [
13,
14,
15,
16]. On the other hand, the special ruled surfaces with different direction vectors are called generalized rectifying ruled surfaces, generalized normal ruled surfaces, and osculating-type ruled surfaces in
, as defined by Önder and Kaya [
17,
18,
19]. Ruled surfaces with the type-2 Bishop frame were studied in [
20].
In this paper, we define osculating type ruled surfaces with a type-2 Bishop frame by utilizing the symmetry properties related to osculating curves. We examine these surfaces according to curvatures of the base curve. Moreover, we calculate their Gaussian and mean curvatures and investigate surface curves on osculating-type ruled surfaces. We see that some geometric properties of osculating type ruled surfaces with type-2 Bishop frame in
shows similarity with the rectifying ruled surfaces according to Frenet frame in
[
19]. Interestingly, the consequences slightly show that the osculating type ruled surfaces with the type-2 Bishop frame are associated with the rectifying ruled surfaces according to the Frenet frame in
. Finally, we present illustrative examples demonstrating the properties and behaviors of these surfaces.
Let
be a regular curve.
and
are the Frenet and type-2 Bishop Frame apparatus of the unit speed curve
, respectively. Then Frenet and type-2 Bishop frame formulas are given by [
5,
21,
22].
The relations between Frenet and type-2 Bishop frames are
where
is the angle between the
vector of the Bishop frame and the principal normal vector
N of the Frenet frame. The curvatures according to the type 2-Bishop frame are defined by [
5]
where
,
and
.
More information about the type-2 Bishop frame can be found in [
5,
6,
7].
A ruled surface
is defined by
where
,
are the base curve and ruling, respectively.
is cylindrical if and only if
with
. The curve
d lying on
satisfying the condition
is defined as the striction curve of
[
23].
The normal vector
n, the Gaussian and mean curvatures of
are defined by [
22]
where
More information about surfaces and ruled surfaces can be found in [
11,
12,
13,
14,
22,
23,
24].
2. Osculating Type Ruled Surfaces with Type 2-Bishop Frame
We define an osculating developable surface by where is a differentiable unit speed curve with curvatures , , type 2-Bishop frame and where is the modified Bishop Darboux vector of , which is defined by . We define a base curve of an osculating type ruled surface where the ruling of the surface always lies in the plane of . The definition of a surface can be given as follows:
Definition 1. Let be a regular curve in with a type-2 Bishop frame. The ruled surface defined byis named an osculating type ruled surface where are differentiable functions of the arc length of parameter s. The osculating type developable surface is an example of an osculating type ruled surface with and . If we take and , then we have a developable tangent surface of . Similarly, taking and gives the principal normal surface of .
Theorem 1. The surface is not regular if and only if Proof. From the Equations in (
9), we obtain
From the last Equations in (
11), we get
Then, if and only if and . □
Proposition 1. Let have singular points and let the base curve ς not be a plane curve with . Then the locus of the singular points of is the curve where and .
Proof. For the singular points of
with the help of Equation (
10), we have
. □
From now on, we will take
From (
9), we have
. Then,
if and only if
and
are non-zero constants and
. As a result, we find that
is constant. If
, we have a contradiction. So, the surface
cannot be cylindrical.
Corollary 1. There exists no cylindrical osculating type ruled surface .
Proposition 2. For , osculating type ruled surface is developable if and only if .
Proof. is developable if and only if
From (
14),
if and only if
, which implies that
. Thus, we get
, i.e.,
. □
Proposition 3. Let and be a striction line of . Then, is constant.
Proof. The striction parameter of
is obtained as
From (
15), we conclude that the curve
is a striction line if and only if
is constant. □
Corollary 2. If , then for the surface , the following statements are equivalent.
- (i)
is developable.
- (ii)
.
From Theorem 1 and Proposition 1, we can give the following corollary.
Corollary 3. The developable osculating type ruled surface is regular if and only if .
Corollary 4. Let be an osculating type ruled surface. Then
- (i)
is a geodesic.
- (ii)
is not an asymptotic curve.
Proof. The unit normal vector
n of the surface
can be obtained as
By taking , the unit normal vector along the base curve on can be obtained as . Thus, we have , then is a geodesic and the equality implies that is not an asymptotic curve. □
Theorem 2. The curve ς is a line of curvature on the osculating type ruled surface with the type-2 Bishop frame if and only if is a plane.
Proof. The curve
is a line of curvature on the surface
if and only if
where
. From (12), we have
. Then,
lies on the plane
and binormal vector
B is constant. Since
and
, we find
. Then the unit normal vector of
is constant, which implies that
is a plane. For the converse, let a unit normal vector
n of
be constant and
be a plane. Since
, we get
, which means the vector
is constant. Then
gives
is a line of curvature on the surface
. □
The fundamental coefficients of the surface
are calculated as follows:
By using the fundamental coefficients computed in (
18), the Gaussian curvature
K and the mean curvature
H of
are given by
respectively. We can easily see from (
19) and Proposition 2 the Gauss curvature
K vanishes if and only if the surface is developable. Then, the following corollary can be given:
Corollary 5. For the osculating type ruled surface with vanishing Gauss curvature K is .
Corollary 6. Regular points of are minimal if and only if Theorem 3. Let be developable osculating type ruled surface. For , the is minimal and for , the is not minimal.
Proof. Let
be developable. Then,
and from (
19), we get
If
, then
and we have
. This result implies that
is minimal. If
, then by utilizing
in (
21) we obtain
From (
22),
is minimal if and only if
. Hence, we obtain
. Then,
gives
. In that case,
which is a contradiction. Therefore,
is not minimal. □
Corollary 7. If , there is no developable osculating type ruled helicoid.
Proof. The Catalan Theorem in [
24] puts forward that helicoids and pieces of helicoids are the only minimal ruled surfaces and, as a result of Theorem 3, there is no developable osculating type ruled helicoid. □
Under the assumption that
is developable, the Equations in (
11) can be written as
and the normal vector
n of the surface is
. For the vector
, the Weingarten map of the surface
is expressed by
, where
is tangent space and
is its base at
. Then, we have
Then the Weingarten map can be expressed by
Thus, for the surface
, the Gaussian curvature and mean curvature are expressed by
respectively. From
, we get the principal curvatures of the surface
as
, and
. Hence, the following corollary can be given:
Corollary 8. Let be a developable osculating type ruled surface.
- (i)
For , there exists no umbilical point on the surface .
- (ii)
For and , the quadratic approach of the surface is a parabolic cylinder.
- (iii)
For , the quadratic approach of the surface is a plane.
Since the unit normal vector
n of the developable osculating type ruled surface
along the base curve
is
, we have
The base curve is a line of curvature, i.e, () if and only if is a plane curve. However, being developable implies that . Then and satisfies so that is a line. Therefore, the following corollary can be given:
Corollary 9. The base curve is a line of curvature if and only if is a line.
If
, the equation
gives the principal direction
as
If we assume , it leads to a contradiction. Then the following corollary can be given:
Corollary 10. Let and be a developable osculating type ruled surface.
- (i)
The parameter curve is a line of curvature if and only if .
- (ii)
The parameter curve cannot be a line of curvature.
Moreover, using (
11) in (
28), we get
. This result satisfies Corollary 9.
Assume that
is a unit tangent vector at a point
p on the developable osculating type ruled surface
. Then we express
as
where
A and
B are differential functions and
. Then, we have
Using (
11) in (
29) and (
30), it is obtained that
Then the normal curvature can be written as
If
, since
is developable,
is obtained. Then, (
32) becomes
. If
, we get
. Then the following theorem can be given:
Theorem 4. Let be a developable osculating type ruled surface.
- (i)
If , then a unit tangent vector is asymptotic if and only if and .
- (ii)
If , then ς is a straight line and any tangent vector is asymptotic.
Since the vector
is unit, considering the type-2 Bishop frame of the osculating type ruled surface, we can take
where
is the angle between
and
. Differentiating the ruling
with respect to
s, we obtain
where
. Then, using the definitions in [
23], the central normal and central tangent vectors of the surface
are determined by
respectively. Then the following corollaries can be given:
Corollary 11. Let be an osculating type ruled surface. Then the following statements are equivalent:
- (i)
The angle between and is constant.
- (ii)
The central normal vector and the binormal vector of ς are linearly dependent.
- (iii)
The central tangent vector lies on the plane of ς.
Corollary 12. For the osculating type ruled surface the following statements are equivalent:
- (i)
is developable.
- (ii)
The central normal vector lies on the plane of ς.
- (iii)
The central tangent vector and the binormal vector of ς are linearly dependent.
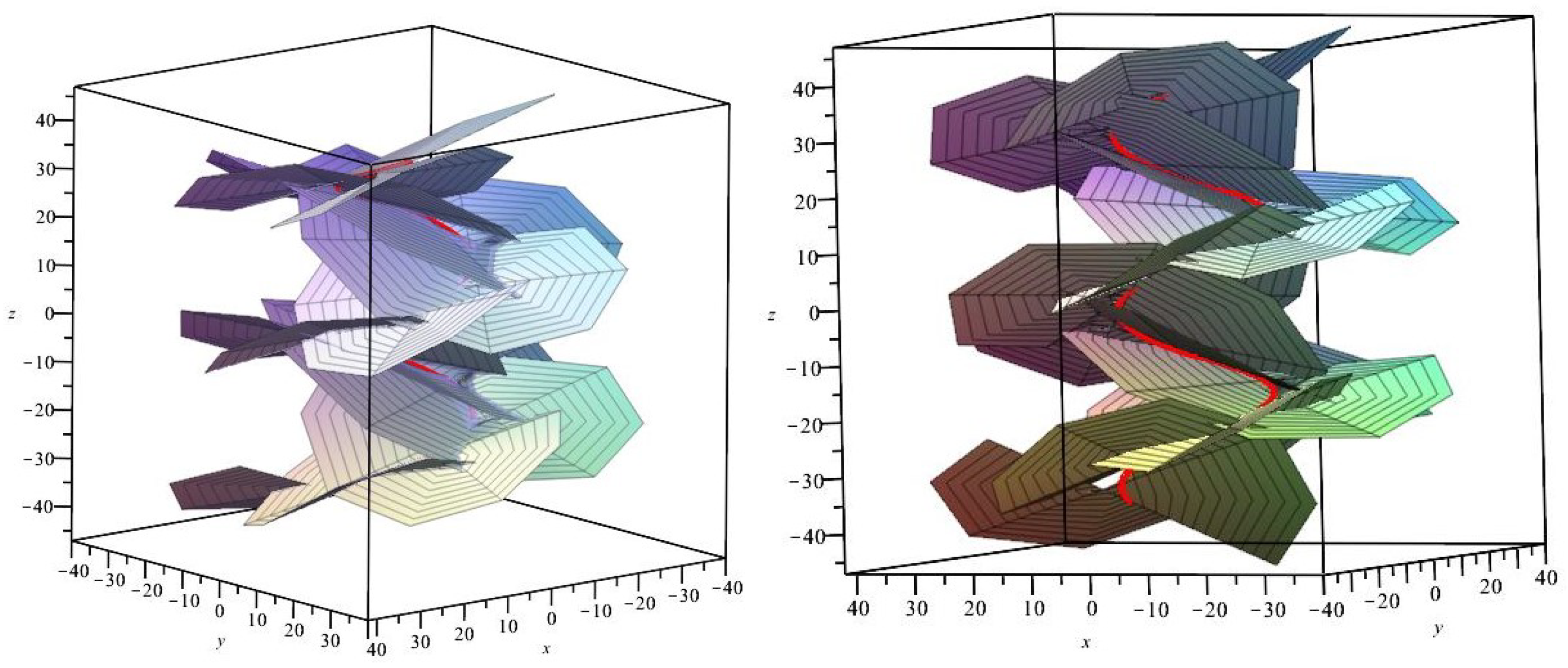
Example 1. Let be a unit speed curve of given by Using (2), the type-2 Bishop frame of is written as follows:where . By taking and , developable osculating type ruled surface is obtained as (37). The surface is displayed in Figure 1. By taking and , we obtain a non-developable osculating type ruled surface . The surface is displayed in Figure 2 where Example 2. Let be a unit speed curve of given by Using (2), the type-2 Bishop frame of is written as follows:where . By taking and , a developable osculating type ruled surface is displayed in Figure 3 where By taking , we obtain a non-developable osculating type ruled surface is displayed in Figure 4 where 

{kind=link}
{kind=link}
{kind=link}
{kind=link}



