
A Deterministic Calibration Method for the Thermodynamic Model of Gas Turbines



Abstract
:1. Introduction
2. Methodology
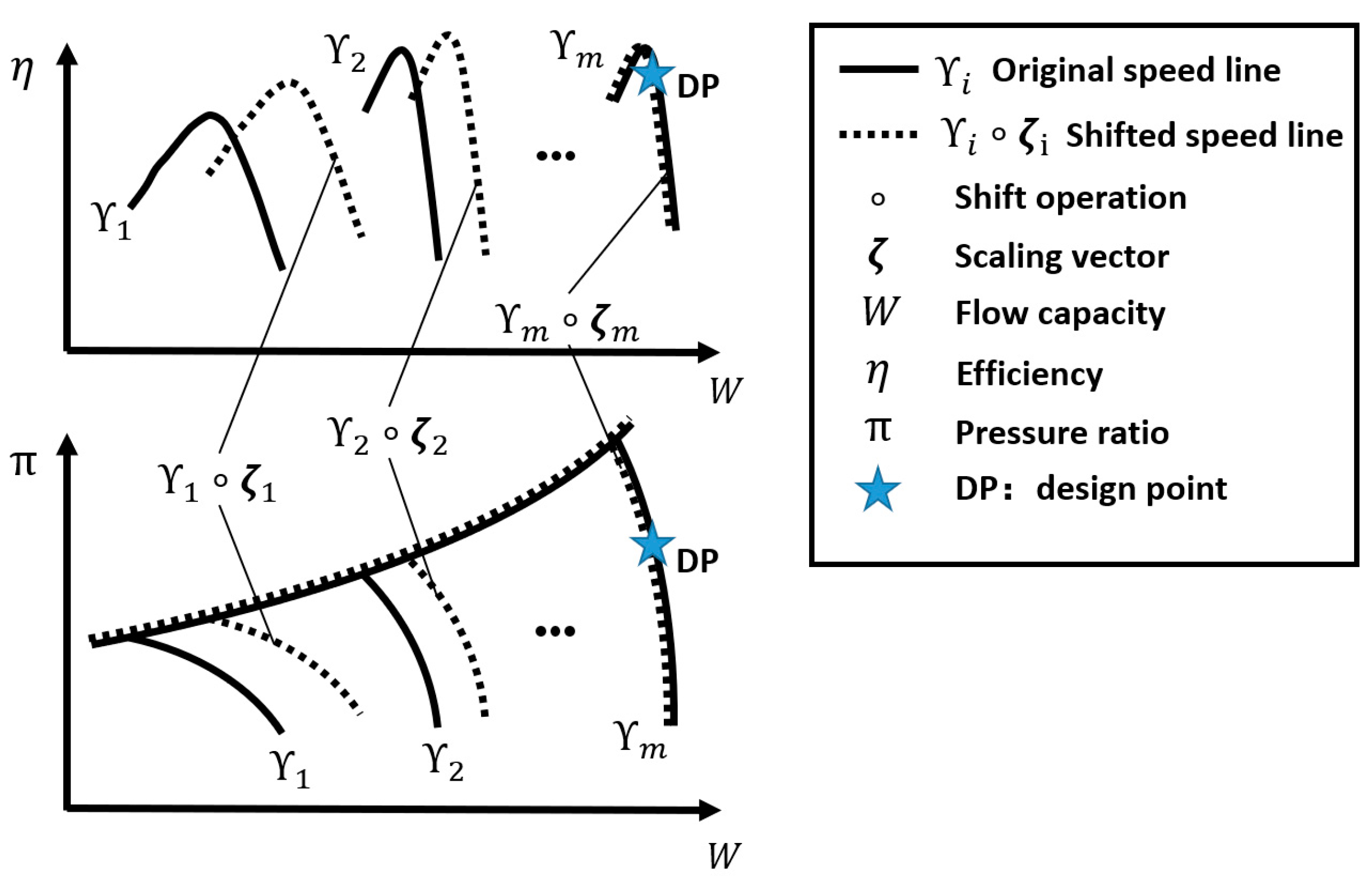
2.1. Representation of Map Shift
2.2. Scaling Factor Determination
2.2.1. Actual Performance Estimation
2.2.2. Scaling Factors at Measured Conditions
2.2.3. Scaling Factors for Map Shifting
- Case 1. M = 1
- Case 2. M > 1
3. Application and Results
3.1. Basic Information of the Model Engine
3.2. “Test Data” Generation
3.3. Actual Performance Estimation
3.4. Determination of Scaling Factors
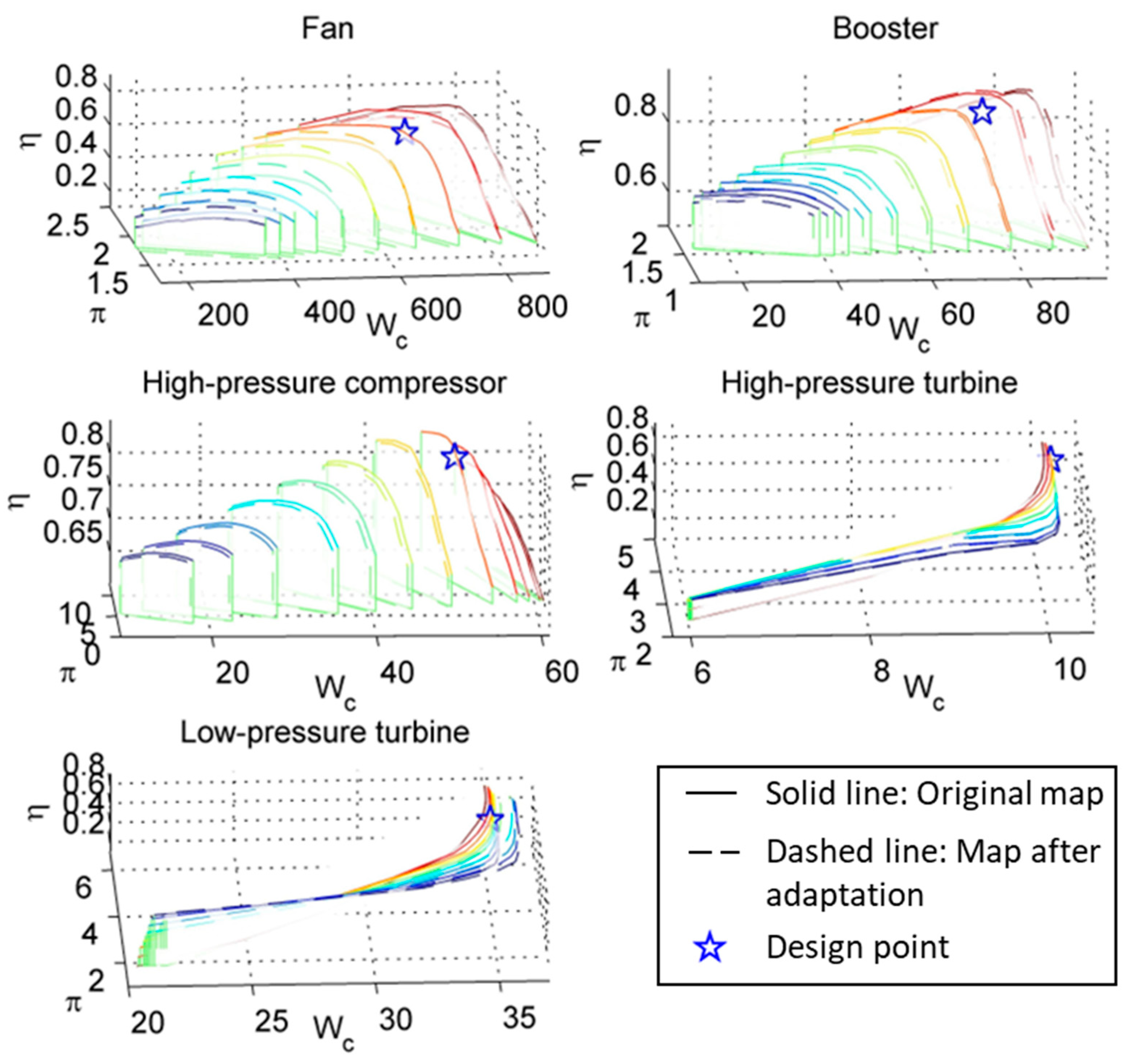
3.5. Adaptation Results
4. Discussions
4.1. Low Time Complexity
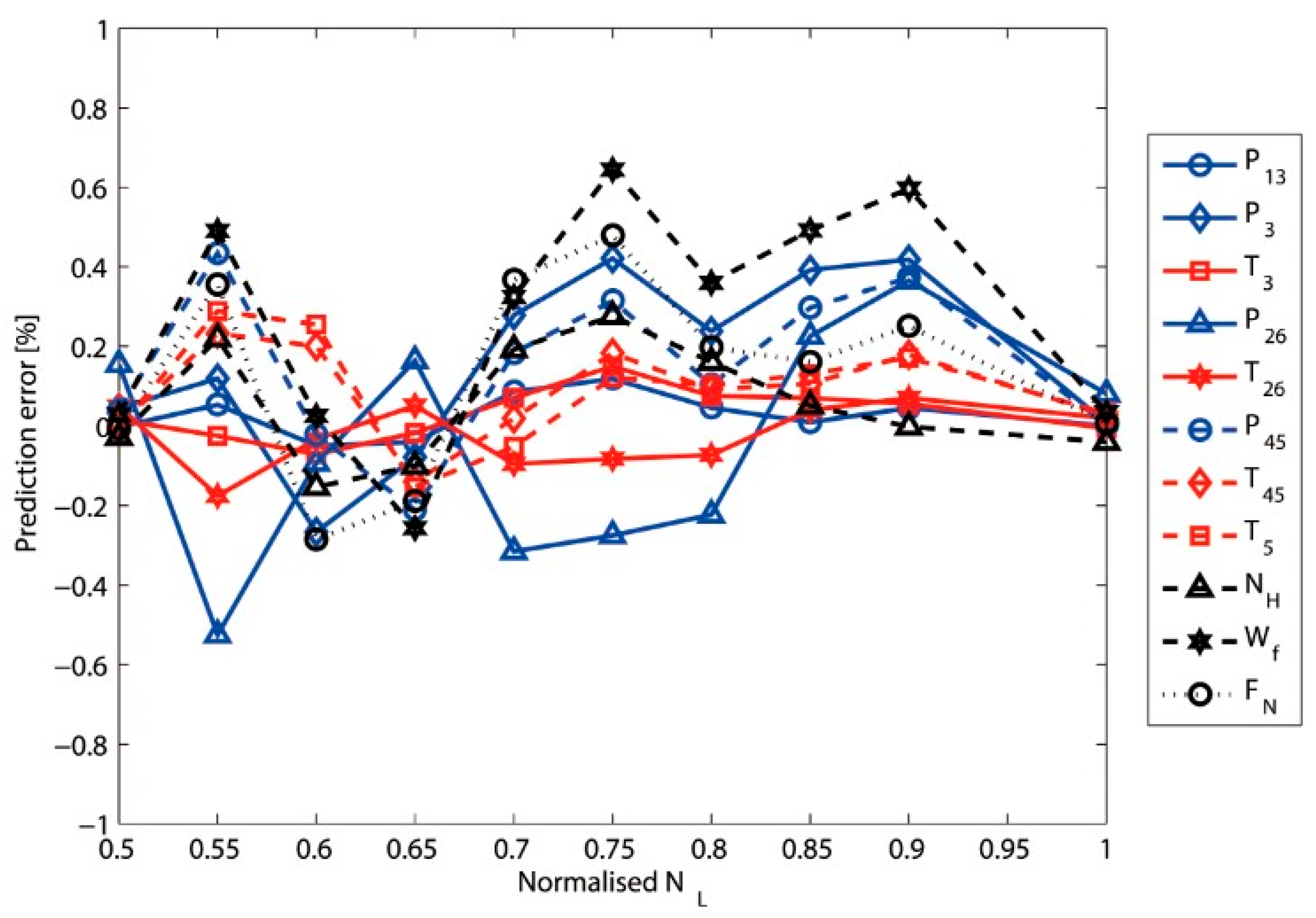
4.2. Guaranteed Accuracy
4.3. Sure Solution
5. Conclusions
- (1)
- The time complexity of this approach is notably low.
- (2)
- The prediction error of the adapted model can be guaranteed at a relatively low level.
- (3)
- In contrast to optimization-based approaches that entail stochastic procedures, the deterministic approach eliminates the need for a searching procedure and consistently delivers a reliable outcome.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| DP | design point |
| GTML-E | Gas Turbine Modeling Library for Education |
| HPC | high-pressure compressor |
| HPT | high-pressure turbine |
| LPT | low-pressure turbine |
| SF | scaling factor |
| n | corrected relative rotational speed |
| W | flow capacity |
| pressure ratio | |
| isentropic efficiency | |
| contour line of the rotational speed | |
| scaling factor of flow capacity | |
| scaling factor of pressure ratio | |
| scaling factor of isentropic efficiency | |
| vector of the above three scaling factors | |
| speed value at measured conditions | |
| scaling vector at measured conditions |
References
- Miao, K.; Wang, X.; Zhu, M.; Yang, S.; Pei, X.; Jiang, Z. Transient Controller Design Based on Reinforcement Learning for a Turbofan Engine with Actuator Dynamics. Symmetry 2022, 14, 684. [Google Scholar] [CrossRef]
- Cao, J. Status, Challenges and Perspectives of Aero-Engine Simulation Technology. J. Propuls. Technol. 2018, 39, 961–970. [Google Scholar]
- Hanachi, H.; Mechefske, C.; Liu, J.; Banerjee, A.; Chen, Y. Performance-based gas turbine health monitoring, diagnostics, and prognostics: A survey. IEEE Trans. Reliab. 2018, 67, 1340–1363. [Google Scholar] [CrossRef]
- Jiang, Z.; Yang, S.; Wang, X.; Long, Y. An Onboard Adaptive Model for Aero-Engine Performance Fast Estimation. Aerospace 2022, 9, 845. [Google Scholar] [CrossRef]
- Mamala, J.J.; Praznowski, K.; Kołodziej, S.; Ligus, G. The Use of Short-Term Compressed Air Supercharging in a Combustion Engine with Spark Ignition. Int. J. Automot. Mech. Eng. 2021, 18, 8704–8713. [Google Scholar] [CrossRef]
- Cruz-Manzo, S.; Panov, V.; Zhang, Y. Gas path fault and degradation modelling in twin-shaft gas turbines. Machines 2018, 6, 43. [Google Scholar] [CrossRef]
- Panov, V. Auto-tuning of real-time dynamic gas turbine models. Turbo Expo: Power for Land, Sea, and Air. In Proceedings of the ASME Turbo Expo 2014: Turbine Technical Conference and Exposition (GT2014-25606, V006T06A004), Düsseldorf, Germany, 16–20 June 2014. [Google Scholar]
- Hayes, R.; Dwight, R.; Marques, S. Reducing parametric uncertainty in limit-cycle oscillation computational models. Aeronaut. J. 2017, 121, 940–969. [Google Scholar] [CrossRef]
- Stamatis, A.; Mathioudakis, K.; Papailiou, K.D. Adaptive Simulation of Gas Turbine Performance. J. Eng. Gas Turbines Power 1990, 112, 168. [Google Scholar] [CrossRef]
- Lambiris, B.; Mathioudakis, K.; Stamatis, A.; Papailiou, K. Adaptive modeling of jet engine performance with application to condition monitoring. J. Propuls. Power 1994, 10, 890–896. [Google Scholar] [CrossRef]
- Li, Y.G.; Marinai, L.; Gatto, E.L.; Pachidis, V.; Philidis, P. Multiple-point adaptive performance simulation tuned to aeroengine test-bed data. J. Propuls. Power 2009, 25, 635–641. [Google Scholar] [CrossRef]
- Li, Y.G.; Ghafir, M.A.; Wang, L.; Singh, R.; Huang, K.; Feng, X. Nonlinear Multiple Points Gas Turbine Off-Design Performance Adaptation Using a Genetic Algorithm. J. Eng. Gas Turbines Power 2011, 133, 42–50. [Google Scholar] [CrossRef]
- Li, Y.G.; Abdul Ghafir, M.F.; Wang, L.; Singh, R.; Huang, K.; Feng, X.; Zhang, W. Improved Multiple Point Nonlinear Genetic Algorithm Based Performance Adaptation Using Least Square Method. J. Eng. Gas Turbines Power 2012, 134, 031701. [Google Scholar] [CrossRef]
- Alberto Misté, G.; Benini, E. Turbojet engine performance tuning with a new map adaptation concept. J. Eng. Gas Turbines Power 2014, 136, 071202. [Google Scholar] [CrossRef]
- Tsoutsanis, E.; Li, Y.-G.; Pilidis, P.; Newby, M. Non-linear model calibration for off-design performance prediction of gas turbines with experimental data. Aeronaut. J. 2017, 121, 1758–1777. [Google Scholar] [CrossRef]
- Tsoutsanis, E.; Meskin, N.; Benammar, M.; Khorasani, K. A component map tuning method for performance prediction and diagnostics of gas turbine compressors. Appl. Energy 2014, 135, 572–585. [Google Scholar] [CrossRef]
- Pang, S.; Li, Q.; Feng, H.; Zhang, H. Joint steady state and transient performance adaptation for aero engine mathematical model. IEEE Access 2019, 7, 36772–36787. [Google Scholar] [CrossRef]
- Baklacioglu, T.; Turan, O.; Aydin, H. Dynamic modeling of exergy efficiency of turboprop engine components using hybrid genetic algorithm-artificial neural networks. Energy 2015, 86, 709–721. [Google Scholar] [CrossRef]
- Dinc, A. Optimization of a Turboprop UAV for Maximum Loiter and Specific Power Using Genetic Algorithm. Int. J. Turbo Jet-Engines 2016, 33, 265–273. [Google Scholar] [CrossRef]
- Gendreau, M.; Potvin, J.Y. Metaheuristics in combinatorial optimization. Ann. Oper. Res. 2005, 140, 189–213. [Google Scholar] [CrossRef]
- Bianchi, L.; Dorigo, M.; Gambardella, L.M.; Gutjahr, W.J. A survey on metaheuristics for stochastic combinatorial optimization. Nat. Comput. 2009, 8, 239–287. [Google Scholar] [CrossRef]
- Li, Y.G.; Pilidis, P.; Newby, M.A. An adaptation approach for gas turbine design-point performance simulation. J. Eng. Gas Turbines Power 2006, 128, 789–795. [Google Scholar] [CrossRef]
- Roth, B.; Doel, D.L.; Mavris, D.N.; Beeson, D. High-accuracy matching of engine performance models to test data. In Proceedings of the ASME Turbo Expo 2003: Power for Land, Sea and Air (GT2003-38784), Atlanta, GA, USA, 16–19 June 2003; pp. 129–137. [Google Scholar]
- Ortega, J.M.; Rheinboldt, W.C. Iterative Solution of Nonlinear Equations in Several Variables. Math. Comput. 1970, 25, 398. [Google Scholar]
- Kurzke, J.; Halliwell, I. Propulsion and Power: An Exploration of Gas Turbine Performance Modeling; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Yang, S. GTML-E: Gas Turbine Modeling Library for Education. 2019. Available online: https://github.com/xjysb/GTML_E (accessed on 1 January 2024).
- Chapman, J.W.; Lavelle, T.M.; May, R.; Litt, J.S.; Guo, T.-H. Propulsion System Simulation Using the Toolbox for the Modeling and Analysis of Thermodynamic Systems (T MATS). In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference (AIAA 2014-3929), Cleveland, OH, USA, 28–30 July 2014; pp. 1–14. [Google Scholar]
- Visser, W.P.; Broomhead, M.J. GSP, a Generic Object-Oriented Gas Turbine Simulation Environment. In Proceedings of the ASME Turbo Expo 2000: Power for Land, Sea, and Air Turbo (V001T01A002), Munich, Germany, 8–11 May 2000. [Google Scholar]
- Dyson, R.J.; Doel, D.L. CF6-80 condition monitoring-the engine manufacturer’s involvement in data acquisition and analysis. In Proceedings of the 20th AIAA//SAE/ASEE Joint Propulsion Conference, Cincinnati, OH, USA, 11–13 June 1984. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurements | Symbol | For Estimation | For Validation |
|---|---|---|---|
| Ambient Pressure | Input | Input | |
| Fan Inlet Temperature | Input | Input | |
| Fan Inlet Pressure | Input | Input | |
| Fuel Flow | Input | Target | |
| Fan Speed | Input | Input | |
| Core Speed | Input | Target | |
| HPC Inlet Temperature | Target | Target | |
| HPC Inlet Pressure | Target | Target | |
| HPC Outlet Temperature | Target | Target | |
| HPC Outlet Pressure | Target | Target | |
| LPT Inlet Temperature | Target | Target | |
| LPT Inlet Pressure | Target | Target | |
| LPT Outlet Temperature | Target | Target | |
| Fan Outlet Pressure | Target | Target | |
| Net Thrust | Input | Target |
| No. | No. | ||
|---|---|---|---|
| 1 * | 0.5 | 6 | 0.75 |
| 2 | 0.55 | 7 * | 0.8 |
| 3 * | 0.6 | 8 | 0.85 |
| 4 | 0.65 | 9 * | 0.9 |
| 5 * | 0.7 | 10 * | 1 |
| No. | Guess | Symbol |
|---|---|---|
| 1 | Fan pressure ratio | |
| 2 | Fan isentropic efficiency | |
| 3 | Booster pressure ratio | |
| 4 | Booster isentropic efficiency | |
| 5 | HPC pressure ratio | |
| 6 | HPC isentropic efficiency | |
| 7 | HPT pressure ratio | |
| 8 | HPT efficiency | |
| 9 | LPT pressure ratio | |
| 10 | LPT efficiency | |
| 11 | Total air flow | |
| 12 | Bypass ratio |
| No. | Error | Symbol |
|---|---|---|
| 1 | Prediction error of | |
| 2 | Flow imbalance in duct nozzle | |
| 3 | Prediction error of | |
| 4 | Prediction error of | |
| 5 | Prediction error of | |
| 6 | Prediction error of | |
| 7 | Prediction error of | |
| 8 | Prediction error of | |
| 9 | Flow imbalance in core nozzle | |
| 10 | Prediction error of | |
| 11 | Torque imbalance of HP spool | |
| 12 | Torque imbalance of LP spool |
| i | i | ||
|---|---|---|---|
| 1 | 4 | ||
| 2 | 5 | ||
| 3 | 6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Z.; Wang, X.; Yang, S.; Zhu, M. A Deterministic Calibration Method for the Thermodynamic Model of Gas Turbines. Symmetry 2024, 16, 522. https://doi.org/10.3390/sym16050522
Jiang Z, Wang X, Yang S, Zhu M. A Deterministic Calibration Method for the Thermodynamic Model of Gas Turbines. Symmetry. 2024; 16(5):522. https://doi.org/10.3390/sym16050522
Chicago/Turabian StyleJiang, Zhen, Xi Wang, Shubo Yang, and Meiyin Zhu. 2024. "A Deterministic Calibration Method for the Thermodynamic Model of Gas Turbines" Symmetry 16, no. 5: 522. https://doi.org/10.3390/sym16050522
APA StyleJiang, Z., Wang, X., Yang, S., & Zhu, M. (2024). A Deterministic Calibration Method for the Thermodynamic Model of Gas Turbines. Symmetry, 16(5), 522. https://doi.org/10.3390/sym16050522