
Intelligent RFID Indoor Localization System Using a Gaussian Filtering Based Extreme Learning Machine

Abstract
:1. Introduction
2. Related Works
2.1. IPS Technologies
2.2. ELM Algorithm
3. The Proposed ELM Based IPS
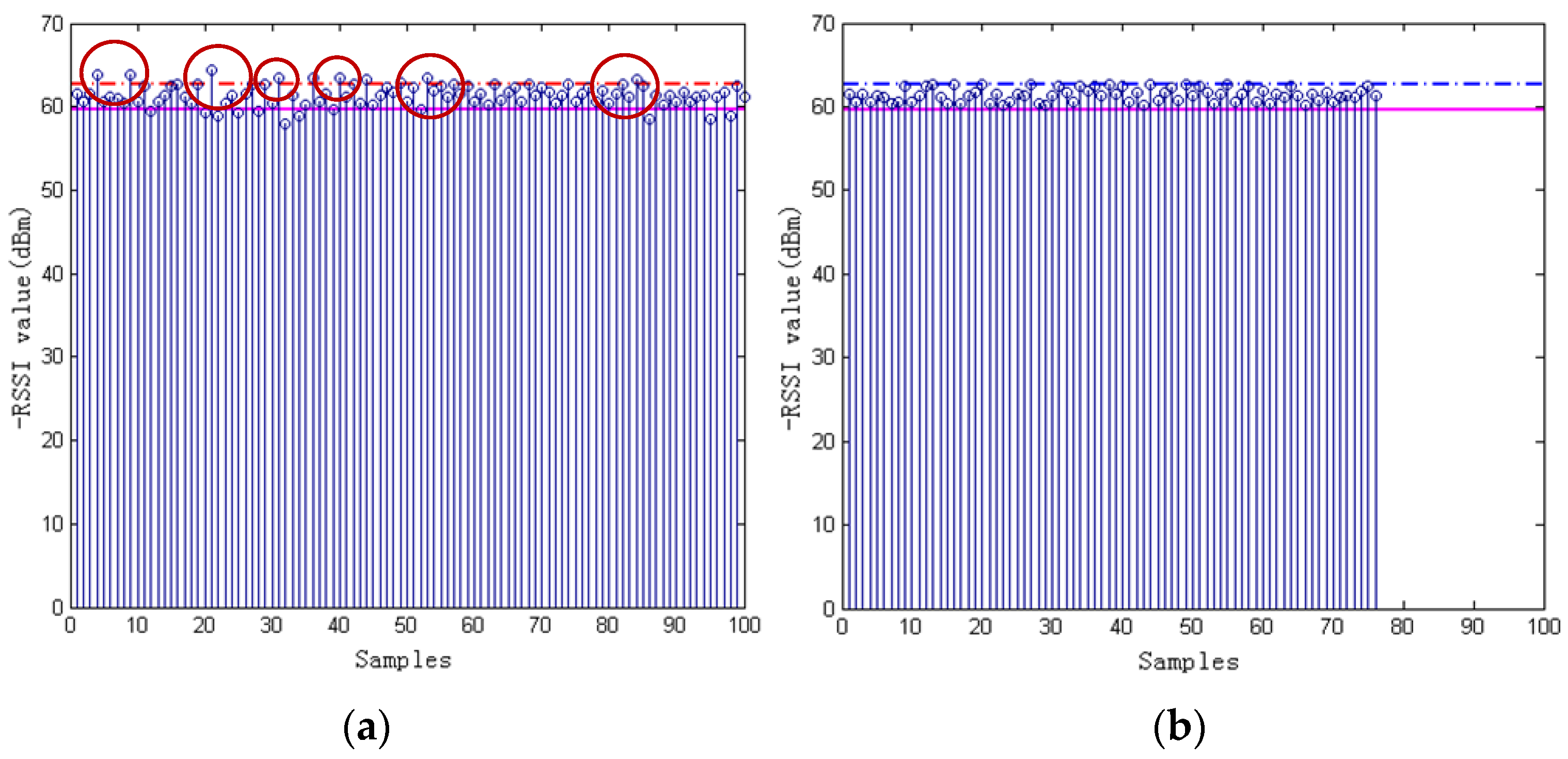
3.1. Data Gaussian Filtering
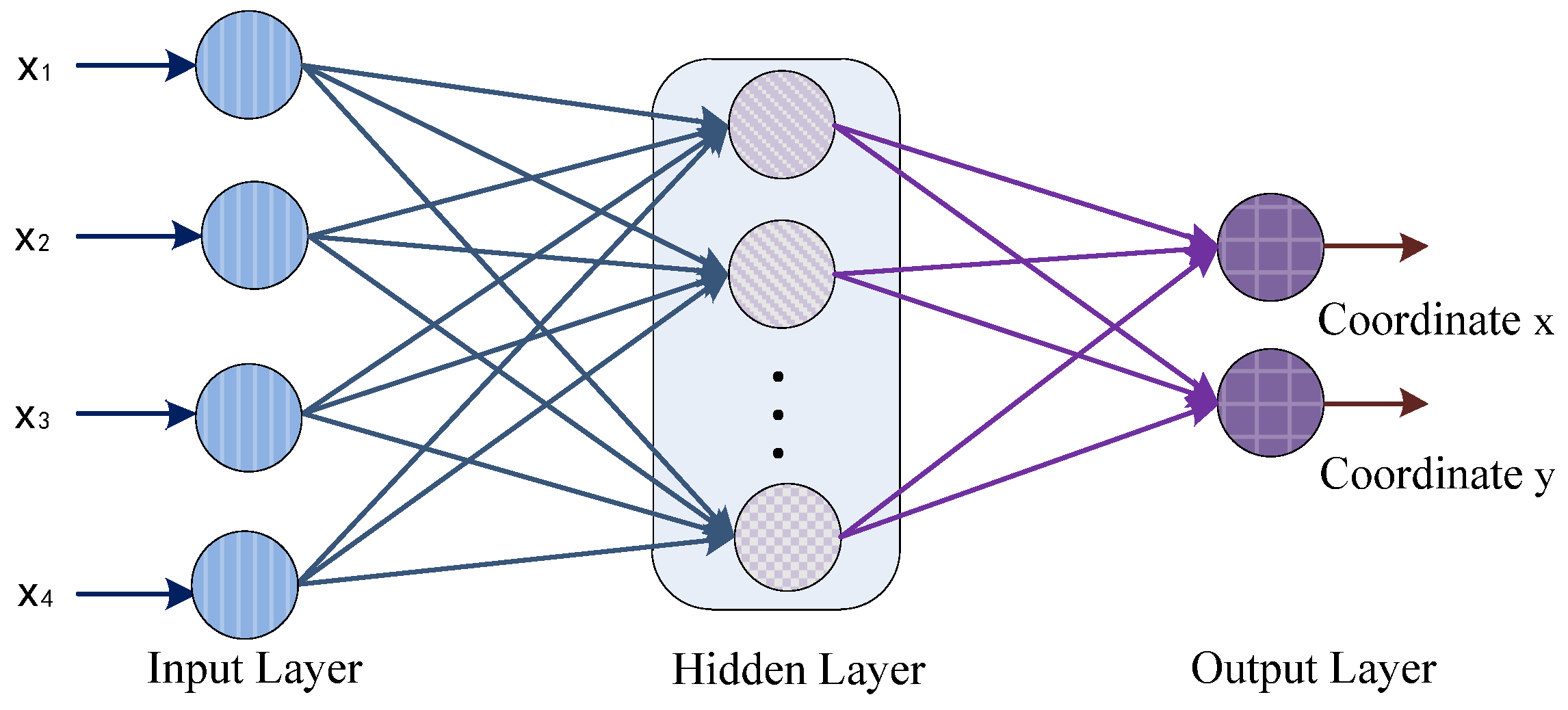
3.2. ELM Learning Method
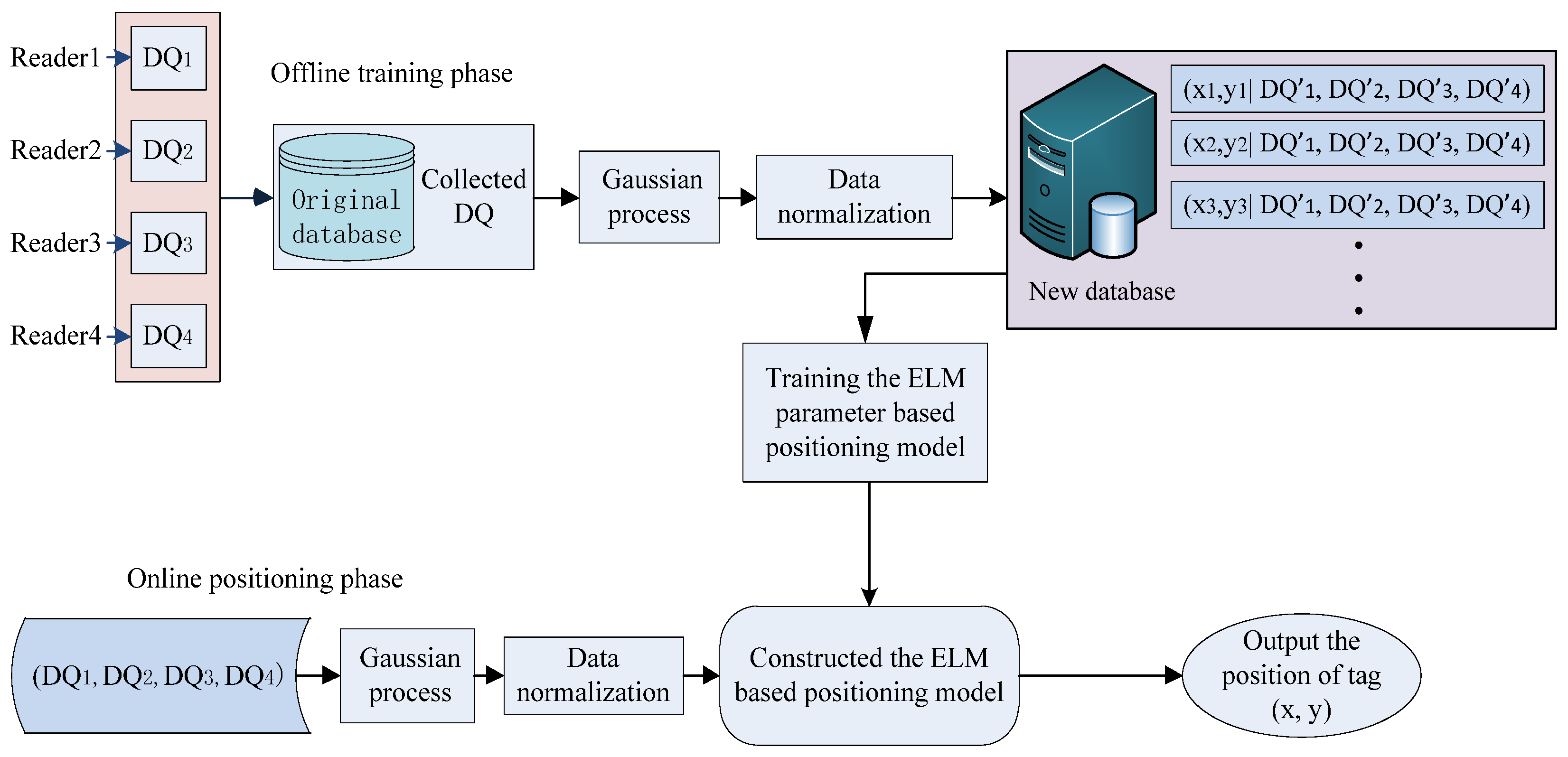
3.3. Overall System
4. Experimental Results and Analysis
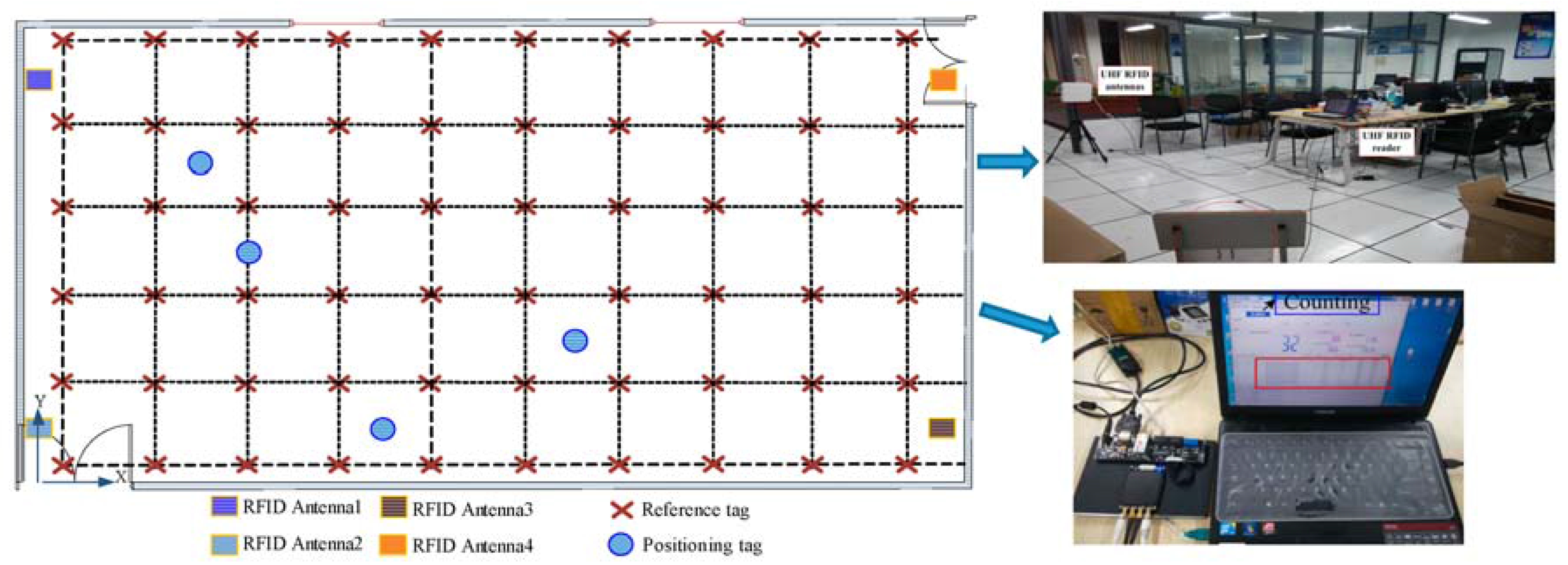
4.1. Experimental Environment
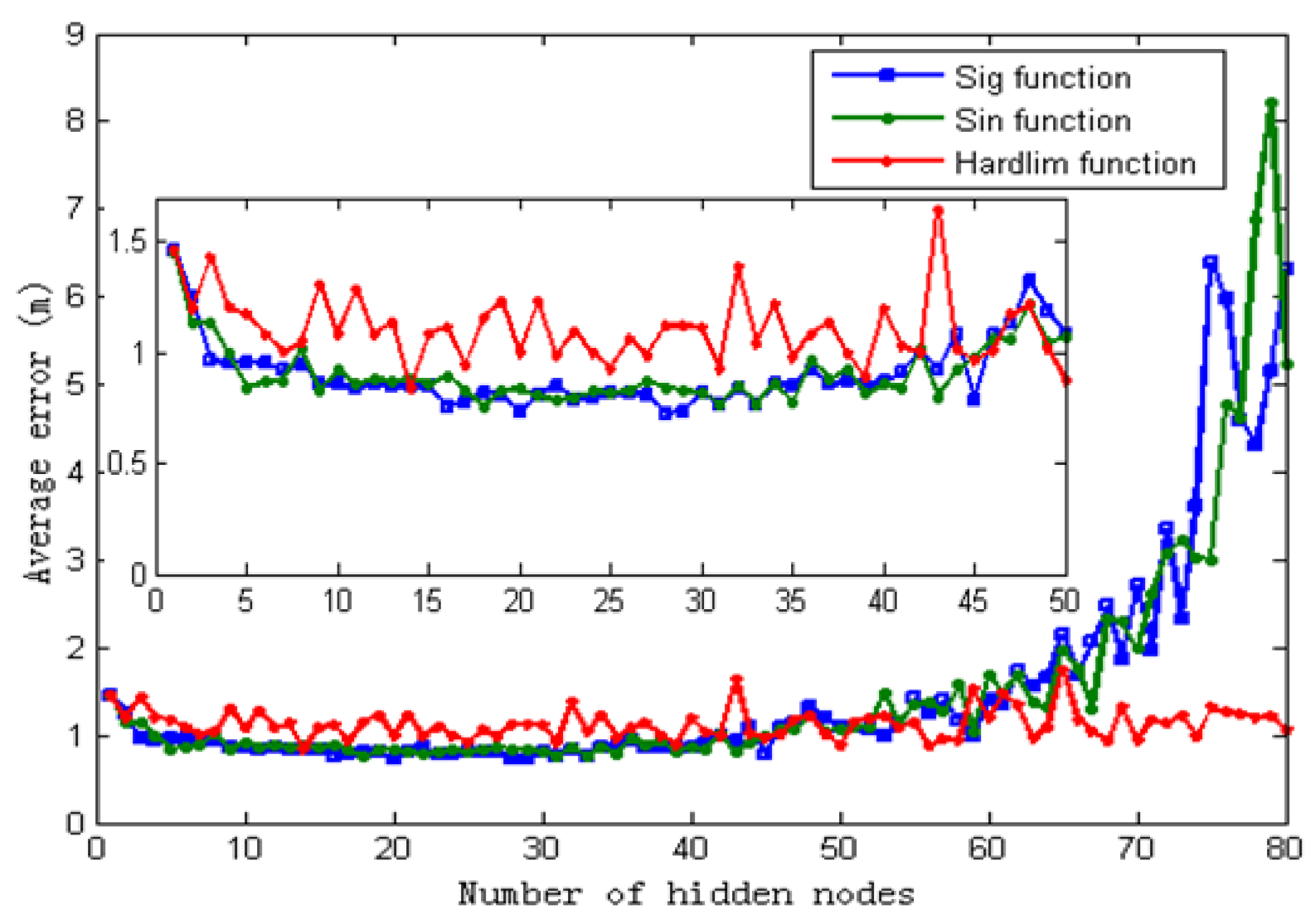
4.2. Selection of Parameters for the ELM Model
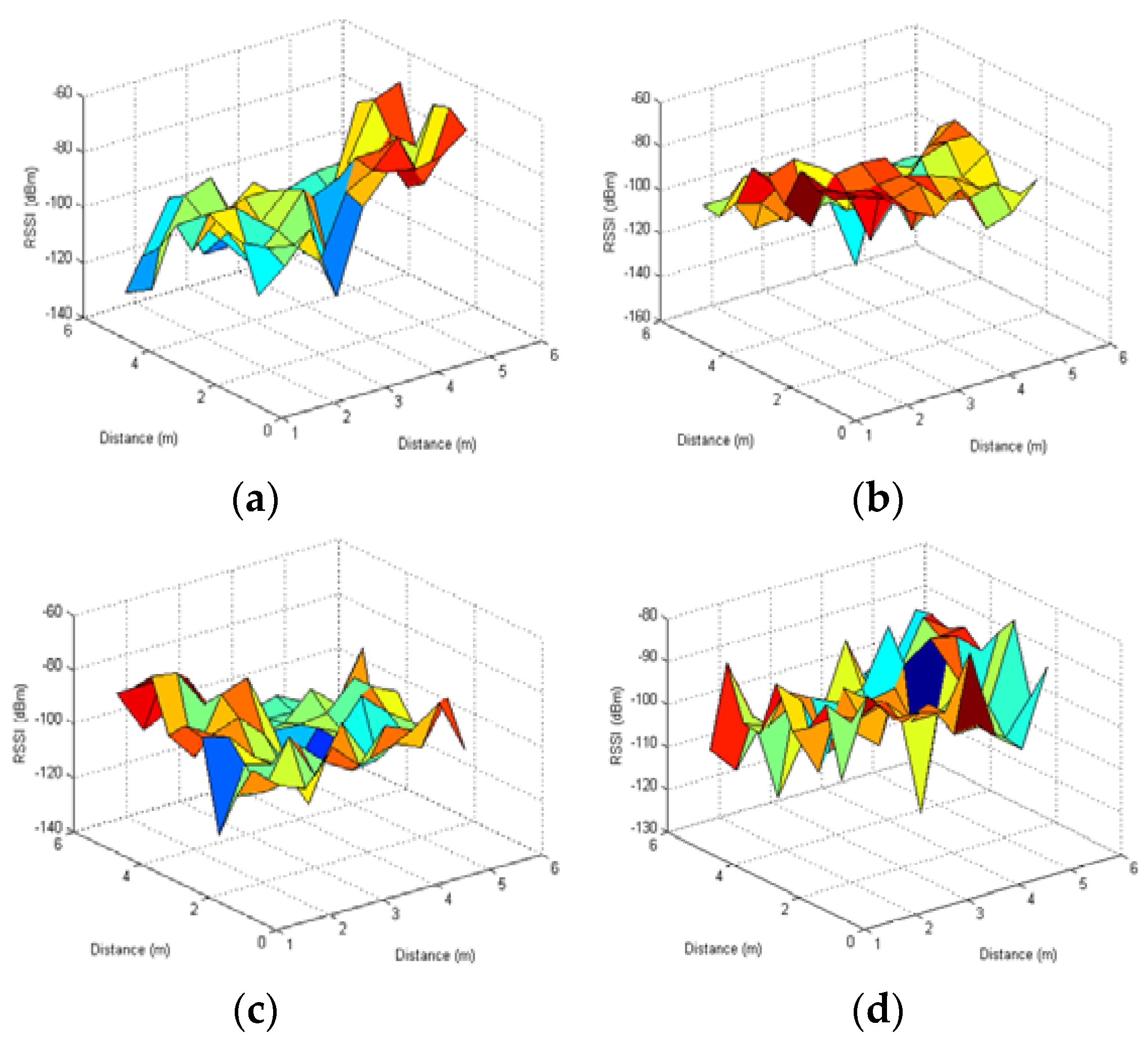
4.3. Comparison of Data Quality
4.4. Comparison with Other Algorithms
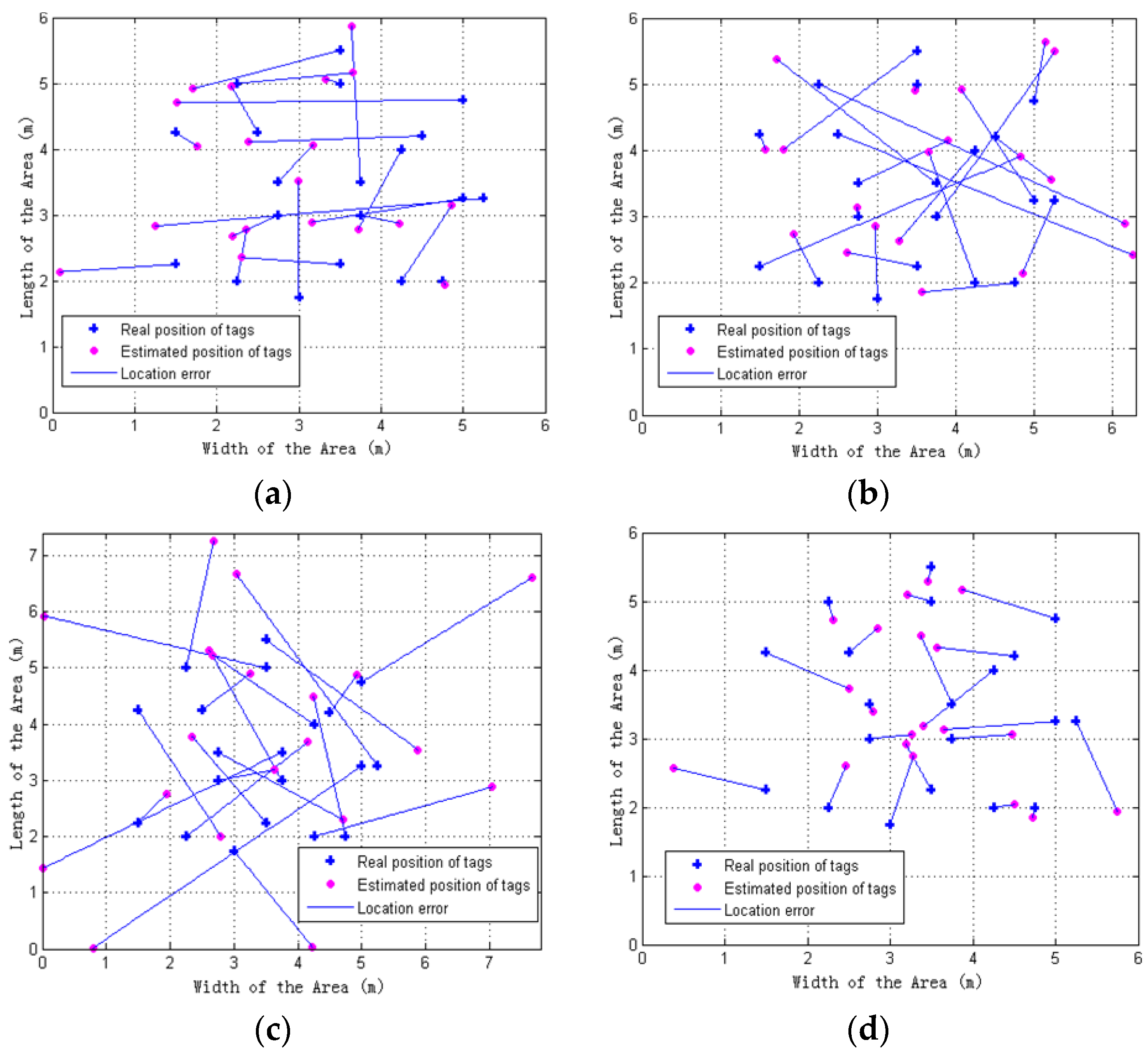
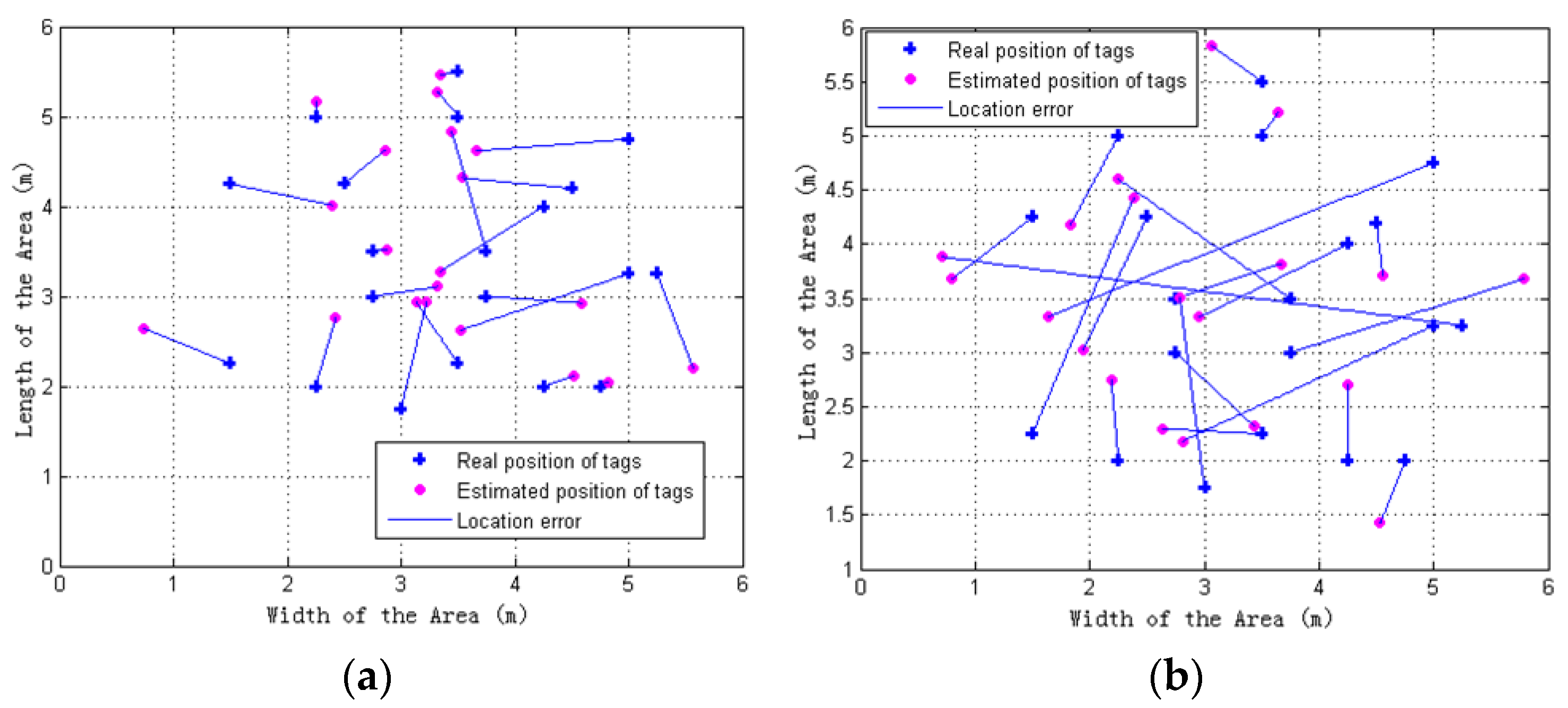
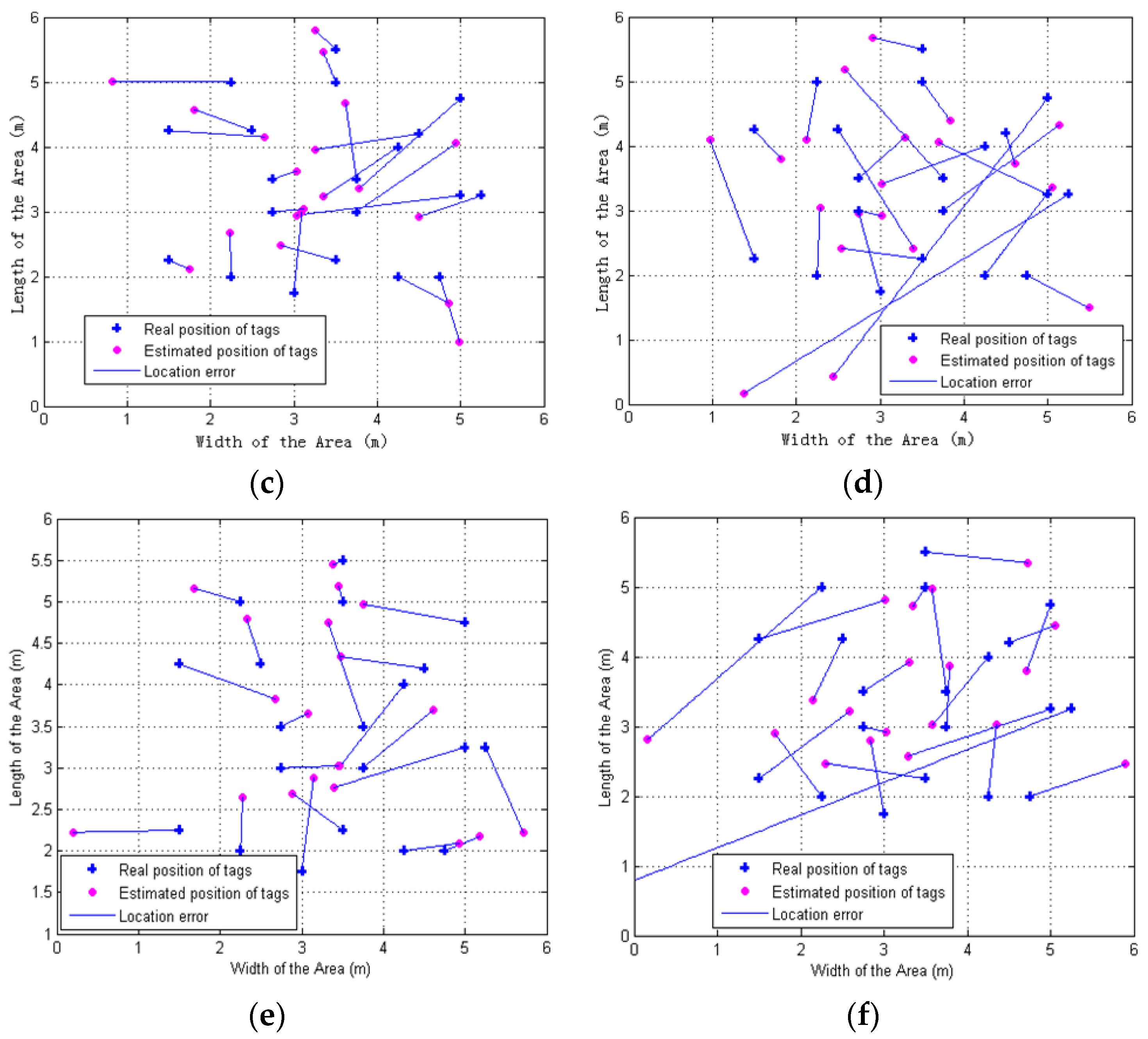
4.4.1. Positioning Error
4.4.2. Computational Time
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.L.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Gressmann, B.; Klimek, H.; Turau, V. Towards Ubiquitous Indoor Location Based Services and Indoor Navigation. In Proceedings of the 2010 7th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 11–12 March 2010; pp. 107–112.
- Lee, D.; Chung, W. Discrete-status-based localization for indoor service robots. IEEE Trans. Ind. Electron. 2006, 53, 1737–1746. [Google Scholar] [CrossRef]
- Moghtadaiee, V.; Dempstera, A.G. Indoor location fingerprinting using FM radio signals. IEEE Trans. Broadcast. 2014, 60, 336–346. [Google Scholar] [CrossRef]
- Luo, X.W.; O’Brien, W.J.; Julien, C.L. Comparative evaluation of received signal-strength index (RSSI) based indoor localization techniques for construction jobsites. Adv. Eng. Inform. 2011, 25, 355–363. [Google Scholar] [CrossRef]
- Benavente-Peces, C.; Moracho-Oliva, V.M.; Dominguez-Garcia, A.; Lugilde-Rodriguez, M. Global system for location and guidance of disabled people: indoor and outdoor technologies integration. In The Fifth International Conference on Networking and Services; IEEE Press: Valencia, Spain, 2009; pp. 370–375. [Google Scholar]
- Shiraishi, T.; Komuro, N.; Ueda, H.; Kasai, H.; Tsuboi, T. Indoor Location Estimation Technique using UHF band RFID. In Proceedings of the International Conference on Information Networking, Busan, Korea, 23–25 January 2008; pp. 1–5.
- Wang, C.S.; Chen, C.C. Flexible localization and identification system based on RFID and vision tracking technologies. In Proceedings of the 2011 International Symposium on Computer Science and Society, Kota Kinabalu, Malaysia, 16–17 July 2011; pp. 356–360.
- Montaser, A.; Moselhi, O. RFID indoor location identification for construction projects. Autom. Constr. 2014, 39, 167–179. [Google Scholar] [CrossRef]
- Goodrum, P.M.; McLaren, M.A.; Durfee, A. The application of active radio frequency identification technology for tool tracking on construction job sites. Autom. Constr. 2006, 15, 292–302. [Google Scholar] [CrossRef]
- Yang, Z.X.; Zhang, P.B.; Chen, L. RFID-enabled indoor positioning method for a real-time manufacturing execution system using OS-ELM. Neurocomputing 2016, 174, 121–133. [Google Scholar] [CrossRef]
- Wu, Z.; Jedari, E.; Muscedere, R.; Rashidzadeh, R. Improved particle filter based on WLAN RSSI fingerprinting and smart sensors for indoor localization. Commput. Commun. 2016, 83, 64–71. [Google Scholar] [CrossRef]
- Wu, H.; Chang, Y.; Hwang, M.; Lin, I. Flexible RFID location system based on artificial neural networks for medical care facilities. SIGBED Rev. 2009, 6, 12. [Google Scholar] [CrossRef]
- Kuo, R.J.; Shieh, M.C.; Zhang, J.W.; Chen, K.Y. The application of an artificial immune system-based back-propagation neural network with feature selection to an RFID positioning system. Robot. Comput. Integr. Manuf. 2013, 29, 431–438. [Google Scholar] [CrossRef]
- Ceravolo, F.; Felice, M.D.; Pizzuti, S. Combining back-propagation and genetic algorithms to train neural networks for ambient temperature modeling in Italy. Lect. Notes Comput. Sci. 2009, 5484, 123–131. [Google Scholar]
- Zou, H.; Wang, H.; Xie, L.; Jia, Q.-S. An RFID indoor positioning system by using weighted path loss and extreme learning machine. In Proceedings of the 2013 IEEE 1st International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA), Taipei, Taiwan, 19–20 August 2013; pp. 66–71.
- Jiang, X.L.; Chen, Y.Q.; Liu, J.F.; Liu, D.J.; Gu, Y.; Chen, Z.Y. Real-time and accurate indoor localization with fusion model of wi-fi fingerprint and motion particle filter. Math. Probl. Eng. 2015, 2015, 545792. [Google Scholar] [CrossRef]
- Fu, H.; Vong, C.M.; Wong, P.K.; Yang, Z. Fast detection of impact location using kernel extreme learning machine. Neural Comput. Appl. 2016, 27, 121–130. [Google Scholar] [CrossRef]
- Lee, C.W.; Lin, T.N.; Fang, S.H.; Chou, Y.H.; Chou, Y.C. A novel clustering-based approach of indoor location fingerprinting. In Proceedings of the 2013 IEEE 24th International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC Workshops), London, UK, 8–9 September 2013; pp. 3191–3196.
- Lin, T.N.; Fang, S.H.; Tseng, W.H.; Lee, C.W.; Hsieh, J.W. A group-discrimination-based access point selection for WLAN fingerprinting localization. IEEE Trans. Veh. Technol. 2014, 63, 3967–3976. [Google Scholar] [CrossRef]
- Kegen, Y.; Jay, G.Y. Statistical NLOS identification based on AOA, TOA and signal strength. IEEE Trans. Veh. Technol. 2009, 58, 274–286. [Google Scholar]
- Yassin, M.; Rachid, E.; Nasrallah, R. Performance Comparison of Positioning Techniques in Wi-Fi Networks. In Proceedings of the 2014 10th International Conference on Innovations in Information Technology (INNOVATIONS), Al-Ain, UAE, 9–11 November 2014; pp. 75–79.
- Hatami, A.; Alavi, B.; Pahlavan, K.; Kanaan, M. A Comparative Performance Evaluation of Indoor Geolocation Technologies. Interdiscip. Inf. Sci. 2006, 12, 133–146. [Google Scholar] [CrossRef]
- Choi, J.S. Accurate and Cost Efficient Object Localization Using Passive UHF RFID. Ph.D. Thesis, University of Texas at Arlington, Arlington, TX, USA, 2011. [Google Scholar]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: A new learning scheme of feedforward neural networks. In Proceedings of the IEEE International Joint Conference on Neural Networks, Budapest, Hungary, 25–29 July 2004; Volume 2, pp. 985–990.
- Huang, G.B.; Chen, L.; Siew, C.K. Universal approximation using incremental constructive feedforward networks with random hidden nodes. IEEE Trans. Neural Netw. 2006, 17, 879–892. [Google Scholar] [CrossRef] [PubMed]
- Li, M.B.; Huang, G.B.; Saratchandran, P.; Sundararajan, N. Fully complex extreme learning machine. Neurocomputing 2005, 68, 306–314. [Google Scholar] [CrossRef]
- Huang, G.; Song, S.; Gupta, J.N.; Wu, C. Semi-supervised and unsupervised extreme learning machines. IEEE Trans. Cybern. 2014, 44, 2405–2417. [Google Scholar]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.-K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Tran, D.A.; Nguyen, T. Localization in wireless sensor networks based on support vector machines. IEEE Trans. Parallel Distrib. Syst. 2008, 19, 981–994. [Google Scholar] [CrossRef]
- Yang, G.; Chen, C.; Jian, Y. An Indoor Localization Algorithm Based on RBF Neural Network Optimized by the Improved PSO. In Proceedings of the International Conference on Electronic, Information Technology and Intellectualization (ICEITI), Guangzhou, China, 11–12 June 2016; pp. 457–464.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Activation Function | Number of Hidden Nodes () | Type |
|---|---|---|---|
| ELM | Sigmoid | 28 | 0 (Regression) |
| Positioning Scenes | Min Error | Max Error | Average Error | Average MSE |
|---|---|---|---|---|
| Case 1 | 0.1003 | 4.5780 | 1.3279 | 1.5079 |
| Case 2 | 0.1125 | 6.3260 | 1.8074 | 2.2991 |
| Case 3 | 0.3181 | 9.2672 | 2.4641 | 3.3730 |
| Case 4 | 1.1505 | 1.5264 | 0.7114 | 1.0562 |
| Positioning Method | Min Error | Max Error | Average Error | Average MSE |
|---|---|---|---|---|
| ELM-Gauss filtering | 0.0820 | 1.6060 | 0.7009 | 0.7910 |
| ELM | 0.2642 | 4.5819 | 1.3237 | 1.6804 |
| GA-BP-Gauss filtering | 0.1470 | 2.0779 | 0.9007 | 0.9366 |
| GA-BP | 0.3723 | 6.9965 | 1.3343 | 2.0387 |
| PSO-BP-Gauss filtering | 0.1317 | 1.6027 | 0.8027 | 0.8126 |
| PSO-BP | 0.2854 | 8.8549 | 1.5821 | 1.9898 |
| Algorithm | Maxgen | Popsize | Crossover Rate | Mutation Rate |
|---|---|---|---|---|
| GA-BP | 100 | 50 | 0.75 | 0.01 |
| Algorithm | Maxgen | Popsize | Learning Factor | Weight |
|---|---|---|---|---|
| PSO-BP | 100 | 50 | 0.5 | 0.5 |
| Run Times | Positioning Method | Training Time (s) | Testing Time (s) |
|---|---|---|---|
| 1 | ELM | 0.5156 | 0.1078 |
| GA-BP | 4.2998 | 1.5326 | |
| PSO-BP | 3.9891 | 1.5196 | |
| 2 | ELM | 0.5945 | 0.1916 |
| GA-BP | 4.0157 | 1.2564 | |
| PSO-BP | 4.2803 | 1.4267 | |
| 3 | ELM | 0.6416 | 0.1277 |
| GA-BP | 4.4682 | 1.6831 | |
| PSO-BP | 4.5002 | 1.4652 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Shi, Z.; Wu, F. Intelligent RFID Indoor Localization System Using a Gaussian Filtering Based Extreme Learning Machine. Symmetry 2017, 9, 30. https://doi.org/10.3390/sym9030030
Wang C, Shi Z, Wu F. Intelligent RFID Indoor Localization System Using a Gaussian Filtering Based Extreme Learning Machine. Symmetry. 2017; 9(3):30. https://doi.org/10.3390/sym9030030
Chicago/Turabian StyleWang, Changzhi, Zhicai Shi, and Fei Wu. 2017. "Intelligent RFID Indoor Localization System Using a Gaussian Filtering Based Extreme Learning Machine" Symmetry 9, no. 3: 30. https://doi.org/10.3390/sym9030030
APA StyleWang, C., Shi, Z., & Wu, F. (2017). Intelligent RFID Indoor Localization System Using a Gaussian Filtering Based Extreme Learning Machine. Symmetry, 9(3), 30. https://doi.org/10.3390/sym9030030