The main aim of RTRO-Coal is to decrease risk in not meeting production targets in continuous coal mining operations. As discussed in the introduction, one main contributor to risk in mining is the limited knowledge about the details of the deposit. The ability to quantify the unavoidable uncertainty and to propagate this through the mining process, when using the mine process simulator, is key to understand the impact of resource model uncertainty on system performance. It is also required as a basis for resource model updating. Therefore this section first reviews the used methodology to capture geological uncertainty within RTRO-Coal, conditional simulation in geostatistics. Subsequently, the state-of-the-art of the mentioned building blocks is detailed, examples are illustrated and the necessary progress in research and technical development stated.
3.1. Capturing Geological Uncertainty
The majority of decisions in mining, such as equipment selection and specification, the optimization of a short- or long-term mine plan or the design of blending opportunities are based on the understanding of the orebody captured in the ore body model. Although estimated models can be considered to be good locally, they also exhibit a smoothing effect. To account for variability and grade uncertainty, methods of conditional simulation have increasingly been applied in geostatistical modelling over the last two decades [
1,
8]. Conditional simulation is a Monte-Carlo-Simulation-based technique that allows generating multiple possible models or scenarios of the deposit based on the information available, usually exploration drill holes. Each model is called realization and reproduces available data and information, statistics and spatial variability. In the terms of geostatistics, the generated models reproduce the representative data histogram and the variogram.
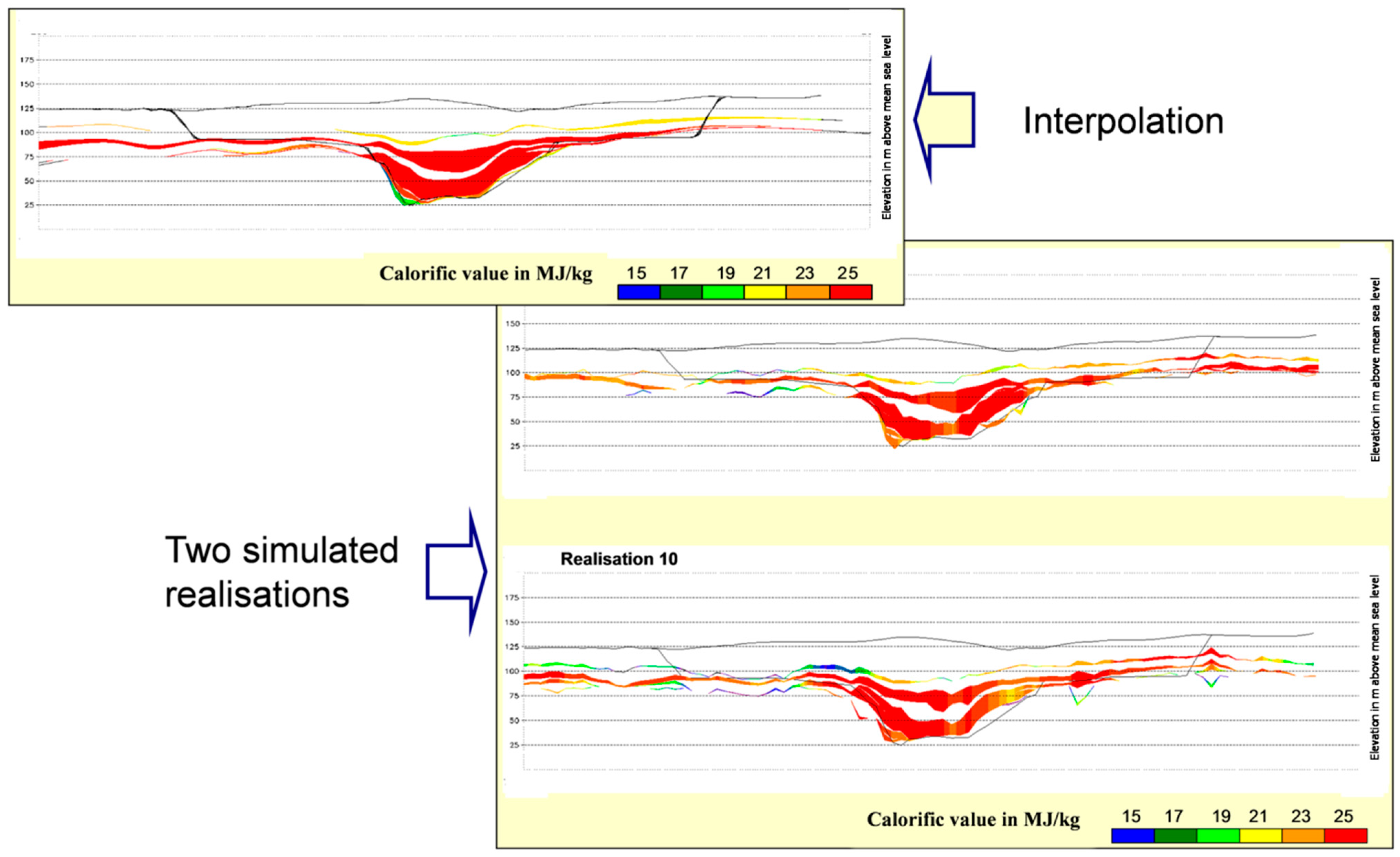
Figure 5 shows a comparison between models generated by interpolation and simulation for a multi-seam coal deposit. A visual inspection of the models illustrates the differences very well. The interpolated model suggests a very smooth seam geometry and distribution of calorific value; however, this smoothness does not represent what was found in the data. Essentially, this smooth behavior does not represent reality. The two simulated models exhibit features inferred from data, namely the variability. Each realization captures the global structure of the deposit but exhibits a different behavior at a local scale.
Figure 5.
Comparison between deposit models based on interpolation and simulation in geostatistics (reproduced after [
9]).
Figure 5.
Comparison between deposit models based on interpolation and simulation in geostatistics (reproduced after [
9]).
Analyzing the spread of values from different realizations at a location, say a mining block, allows for quantifying uncertainty in prediction and inferring probabilities of exceeding certain thresholds. Various case studies about the value added when using conditional simulation techniques in coal mining are documented in literature e.g., [
10,
11,
12,
13].
For practicality and acceptance of these conditional simulation techniques as a standard tool in industry, some challenges have to be overcome, including the size of simulations, computational efficiency and data management. Large coal deposit models, frequently discretized by up to millions grid nodes, need to be simulated. The development of algorithms for mining applications in general has taken this requirement into account. Dimitrakopoulos and Luo [
14] suggest the theoretical background for a computationally efficient method, the Generalized Sequential Gaussian Simulation (GSGS). This sequential simulation approach simulates groups of clustered nodes simultaneously instead of node-by-node, which decreases computing time. Benndorf [
9] demonstrates the applicability and computational benefit of GSGS in large coal deposits. Recently, this technique was combined with the minimum/maximum autocorrelation factors (MAF) decorrelation method for jointly simulating multiple correlated attributes, such as roof and floors in a lithological seam sequence [
15].
With these techniques a toolset is available in general, but as well for RTRO-Coal, that enables a scenario-based modelling of the coal resource that captures uncertainty in prediction.
3.2. Optimization of Long-Term Mine Planning in Continuous Mining Operations
Long-term mine planning and production scheduling aim to define the “best” mine plan subject to the constraints imposed by physical and geological conditions, policies and the operational mining approach. The term “best” is defined by management objectives. These typically include maximizing the monetary value of the mining project as well as meeting customer expectations and guaranteeing a safe operation.
Methods of mathematical optimization, such as linear programming LP (e.g., [
16]) or mixed integer programming MIP [
17,
18,
19] have been successfully applied for over three decades to find optimal solutions for the defined problem. However, applications were mainly focused on discontinuous block mining in diffuse deposits. For continuous mining operations, such as lignite deposits, only very few applications are known to the authors. For example, Kawalec and Specylak [
20] report a simplified application of open pit design optimization to a lignite deposit located in the Belchatow field in Poland using the commercially available Whittle software. For the first time, Minnecker
et al. [
21] introduced a new multi-objective MIP-model for coal-quality driven long-term extraction mine planning, tailored to continuous mining operations. Constraints developed honor the practical restriction of a continuous extraction system: first the complete mining pass has to be excavated before the belt conveyor can be moved and the next mining pass is accessible.
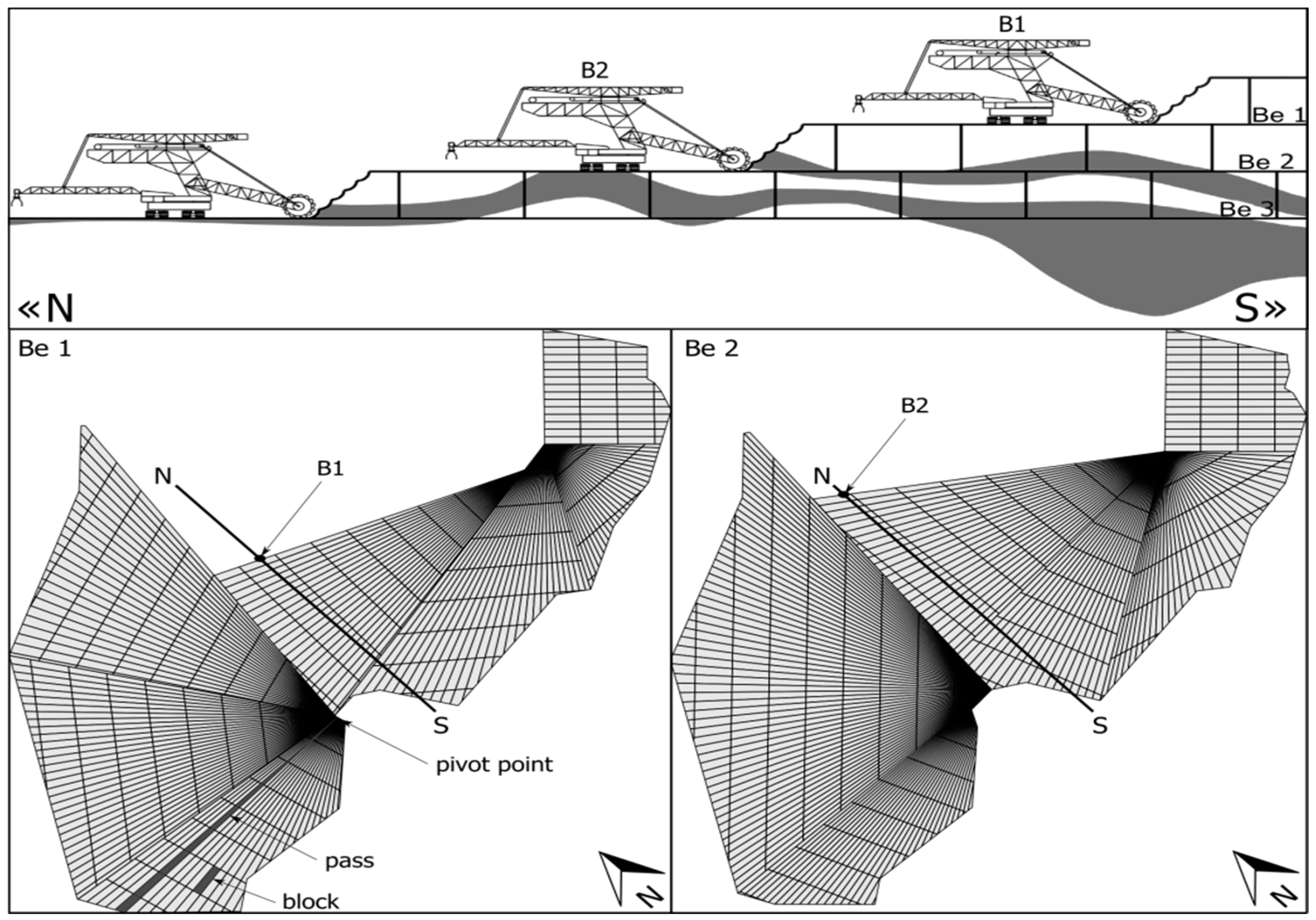
Figure 6 illustrates the general division of the deposit in mining benches (BE) and the geometry of the block model, which results from the continuous mining system pivoting around a central point. The quality driven optimization approach allows defining upper and lower limits for critical coal quality parameters, e.g., calorific value and Fe
2O
3 in ash. The optimizer balances out the annual advance of each bench (Be) under the given constraints to meet targets as good as possible.
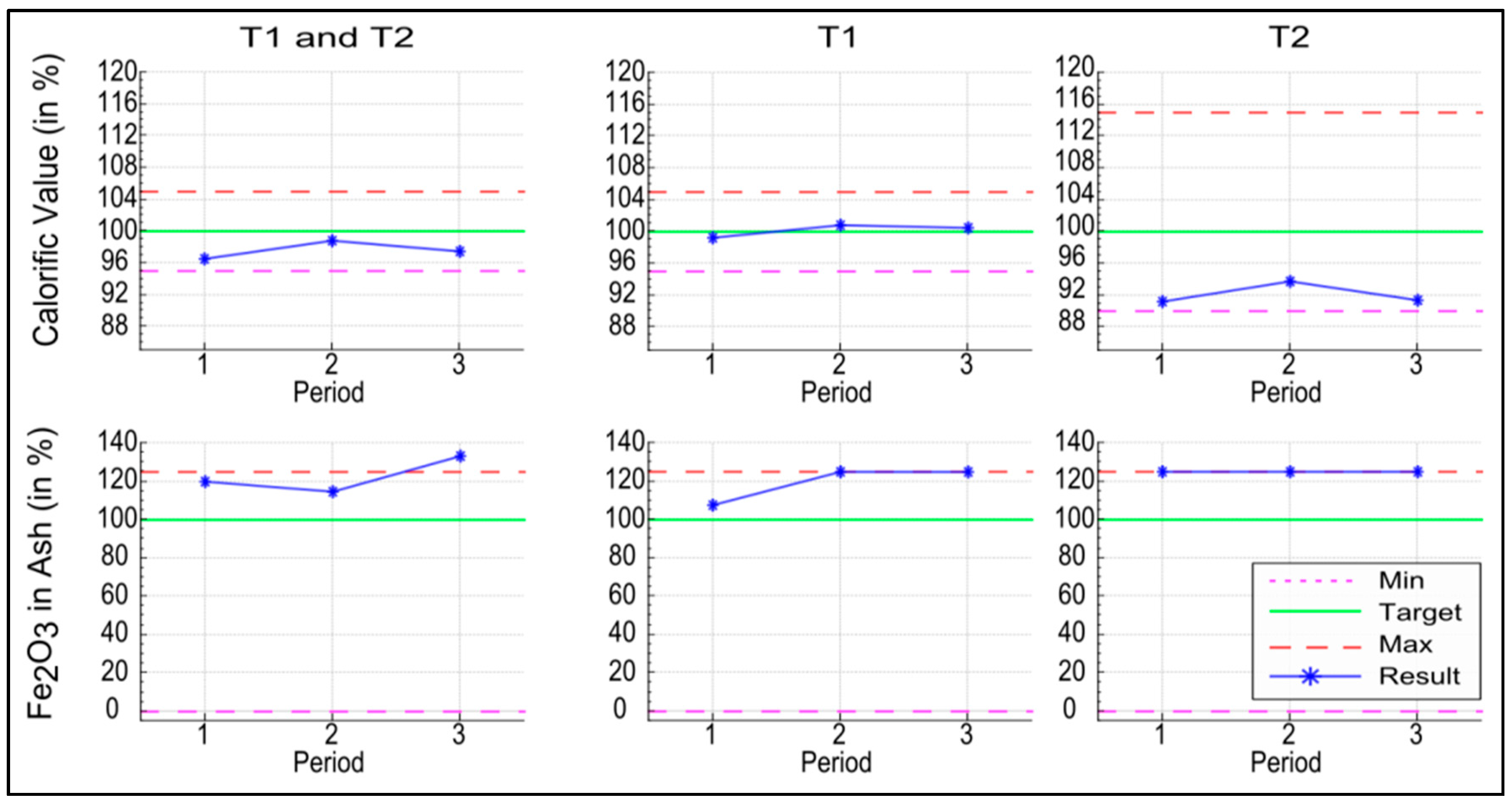
Figure 7 shows the expected quality for an optimized plan for two products, dust coal (T1) and boiler coal (T2). As can be seen, the calorific value is well balanced out between the years of production. Due to an increased Fe
2O
3 content in this particular part of the deposit, meeting this production target will be a challenge during the illustrated time span.
An extension of this approach to integrate different scenarios of the coal deposit based on conditional simulation was suggested and tested by [
22]. As a result the optimized long-term mine plans have a high probability of meeting production targets given the uncertain nature of the knowledge about the details of the deposit.
RTRO-Coal adopts this approach for optimizing the long-term mine plan. A next step is to investigate the feasibility of short-term mine planning and daily production within the boundaries defined by the optimized long-term plan. RTRO-Coal will investigate options for a new integrated short-term/long-term approach. So far such an approach is not known by the authors. A first discussion of potential approaches is given in the section on future research.
Figure 6.
Schematic bench design and block model layout for optimizing continuous mining operations (reproduced after [
21]).
Figure 6.
Schematic bench design and block model layout for optimizing continuous mining operations (reproduced after [
21]).
Figure 7.
Prediction of expected coal quality produced during the next periods when executing the optimized long-term plan (reproduced after [
21]).
Figure 7.
Prediction of expected coal quality produced during the next periods when executing the optimized long-term plan (reproduced after [
21]).
3.3. Process Simulation of Continuous Mining Operations
Continuous mining systems containing multiple excavators, producing multiple products of raw materials, are highly complex and exhibit strong interdependencies between constituents. A network of conveyor belts is used for transportation of the extracted materials to the different waste dumps or the coal stockpile. Techniques of stochastic process simulation, whether discrete, continuous or combined [
23], provide a powerful tool for measuring performance indicators of complex systems. In the past few years there has been a large development in applications of process simulation in the mining industry. For example Panagiotou [
24] described the application of the simulation program SIMPTOL for opencast lignite mines that use bucket wheel excavators (BWEs), conveyors and stackers. The main objective was to select and match the equipment to fit material characteristics while meeting production requirements and mine profiles. Michalakopoulos
et al. [
25] presented the simulation model of an excavation system at a multi-level terrace mine using the GPSS/H simulation language. The principal model output variables are production and arrival rate at the transfer point of mineral and waste. Later on [
26] utilize the Arena simulation software for the simulation of Kardia Field mine in Greece. The validation of results illustrates an acceptable agreement with the actual data. Fioroni
et al. [
27] used discrete tools for the simulation of the continuous behavior of a conveyor belt network in a large steelmaking company. The authors proposed a modelling approach of the flow process, which uses portions of materials, which that are treated as discrete entities in simulation modelling. The results demonstrated that this technique was valid and successful.
As a literature demonstrates, stochastic process simulation is a potent method for measuring the Key Performance Indicators (KPIs) in continuous mining systems. However, the investigation of the impacts of geological uncertainty in the performance of continuous mining systems is still seen as a major gap. Within RTRO-Coal a new stochastic based mine process simulator was developed focusing on the effects of geological uncertainty to predict mine process performance and reliability. KPI’s of the mining system are defined within RTRO-Coal as the ability to meet coal quality and quantity targets and also the utilization and efficiency of the system. Potential KPI’s to be evaluated for each simulation replication are presented in
Table 1. More details about the mathematical formulation and the evaluation function are discussed in [
28].
To account for geological uncertainty, the concept of RTRO-Coal combines the two simulation concepts, geostatistical simulation for capturing geological uncertainty and stochastic process simulation to predict the large continuous mining system’s performance and reliability.
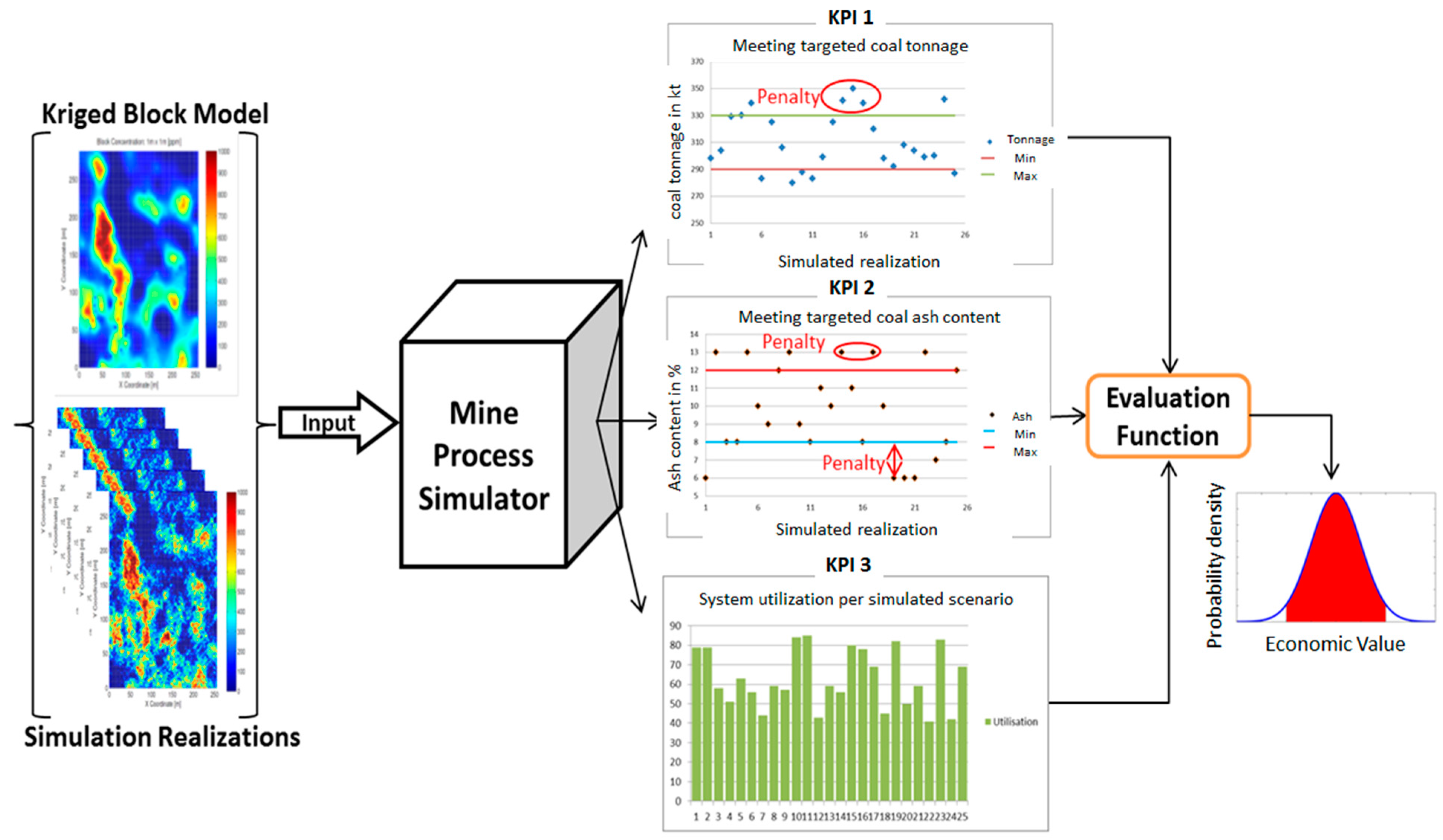
Figure 8 shows the integrated simulation approach. As such it incorporates the timely and spatial varying nature of mining problems. With the deposit models representing spatial variability of characteristics and the extraction sequence representing availability and projected capacity over time the spatial and timely variability of the extraction system are fully captured in the simulator.
The output of the simulator is the set of values for each KPI. At this stage, penalties are applied when deviating from production targets. The KPI’s are summarized in an evaluation function, which results in a probability distribution when multiple replications are evaluated.
Table 1.
The parameters of the evaluation function related to the Key Performance Indicators (KPI’s).
Table 1.
The parameters of the evaluation function related to the Key Performance Indicators (KPI’s).
| Parameter | Description |
|---|
| Objective | Evaluation of aggregated KPI’s of each simulation replication based on the pre-defined short-term planning targets. |
| KPIs | J1—Coal quality: should be between defined lower and upper limit otherwise penalties are applied. |
| J2—Coal quantity: should be between defined lower and upper limit otherwise penalties are applied. |
| J3—Utilization: average utilization of the system can be concluded from the average utilization of excavators. |
| Decision Variables | Task schedules: different alternatives for short-term plans of mine (daily/weekly/monthly). |
| Extraction sequences: sequence of extracting mining blocks for each excavator. |
| Stockpile management: Stacking and reclaiming sequence and inventory. |
| Planned extraction rate of excavators for different time intervals. |
| Constraints | Each block can be mined just once. |
| Conveyor belts can only be moved further along if all the blocks in one pass are mined out. |
Figure 8.
Integrated simulation approach (reproduced after [
28]).
Figure 8.
Integrated simulation approach (reproduced after [
28]).
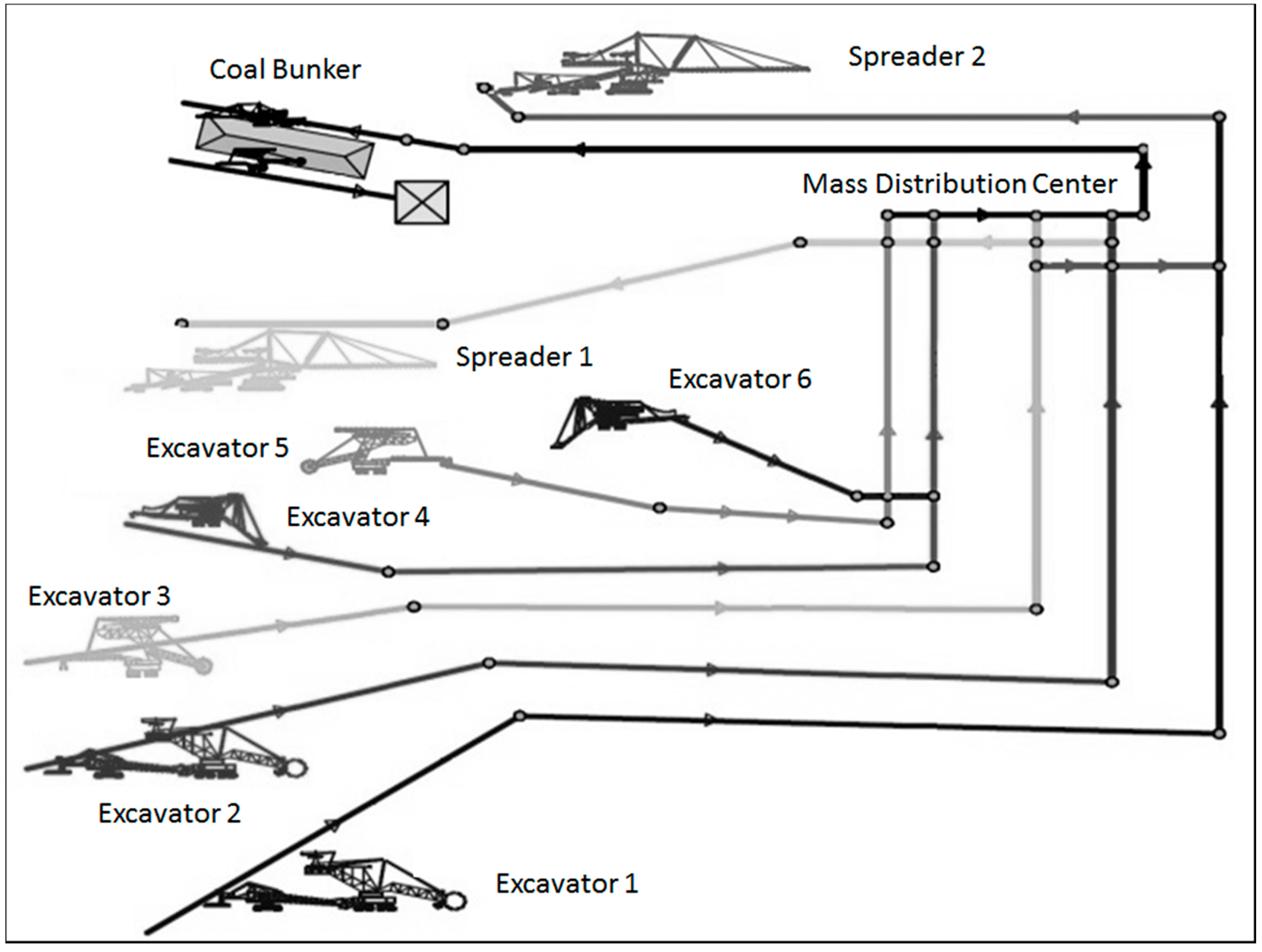
For illustration,
Figure 9 shows the schema of a typical open cast mine using continuous mining technology. The mining operation uses six excavators at six benches. The material extracted is transported by conveyor belts to the mass distribution center. Here, destinations are determined based on the type of material and based on the excavator from which the material originates. Finally, waste materials are conveyed to spreader 1 or 2 and the coal to the stockpile yard.
A resource block model is provided. For comparison, a block model was generated based on estimation and simulation in geostatistics. In addition, for benchmarking a synthetic reality was reconstructed based on historical mine data.
Figure 9.
Schematic view of the problem (opencast mine).
Figure 9.
Schematic view of the problem (opencast mine).
Table 2 and
Table 3 summarize general information and technical parameters that are used for simulation model building.
Table 2.
Parameters related to equipment.
Table 2.
Parameters related to equipment.
| Type | Theoretical Capacity (loose m3/h) | Scheduled Time Tscheduled (h) |
|---|
| Excavator 1 | 4900 | 152 |
| Excavator 2 | 4900 | 152 |
| Excavator 3 | 3770 | 144 |
| Excavator 4 | 1400 | 168 |
| Excavator 5 | 3770 | 152 |
| Excavator 6 | 740 | 152 |
| Spreader 1 | 10,000 | 168 |
| Spreader 2 | 10,000 | 168 |
| Conveyor belts | 6000 | 168 |
Table 3.
Parameters related to targets.
Table 3.
Parameters related to targets.
| Material Types | Targets | Penalties |
|---|
| Type | Density | Max | Min | Upper | Lower |
| Coal Quantity | 1 | 322,700 t | 316,000 t | 1 | 1 |
| Coal Quality | Ash content < 8.5% | 1 |
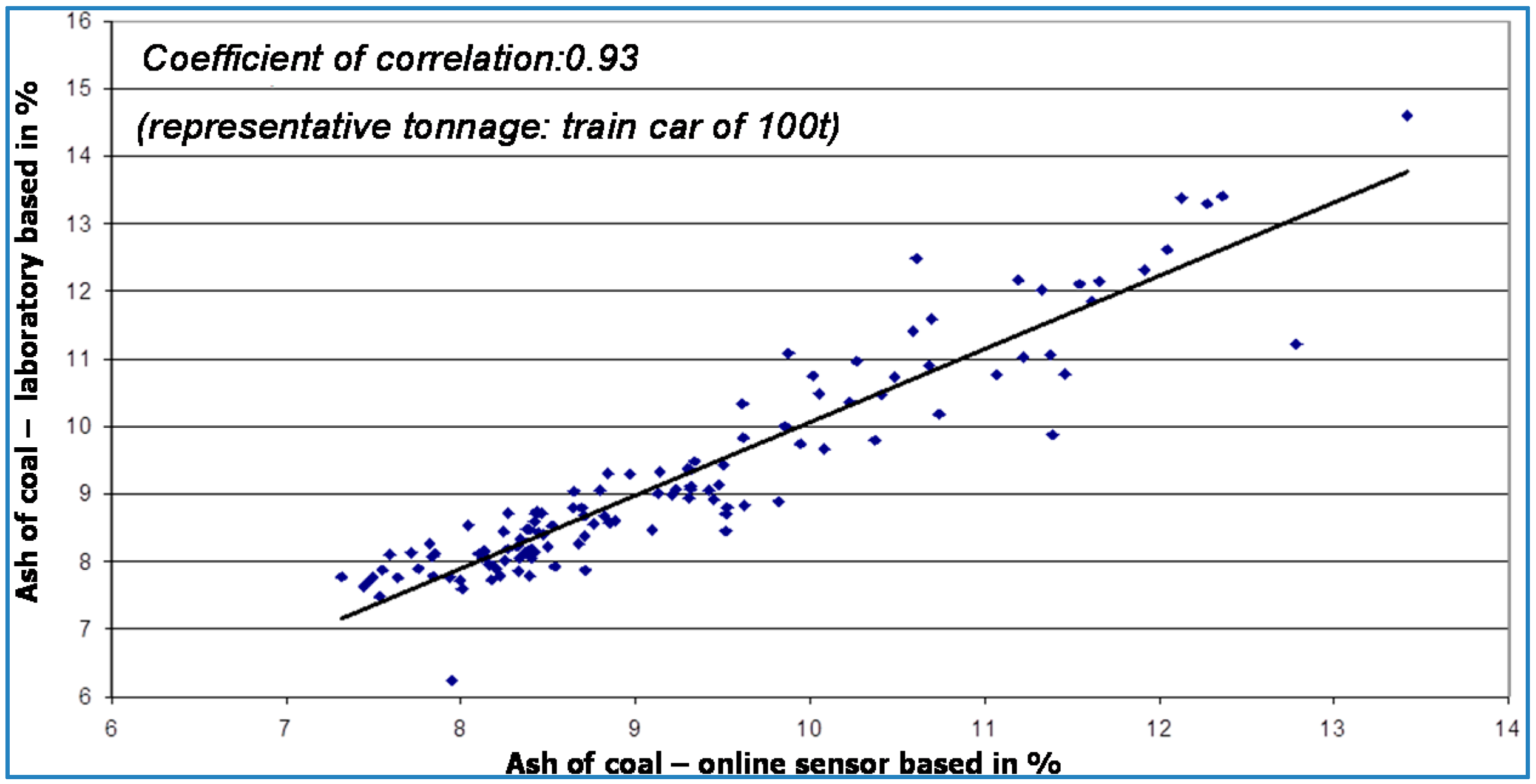
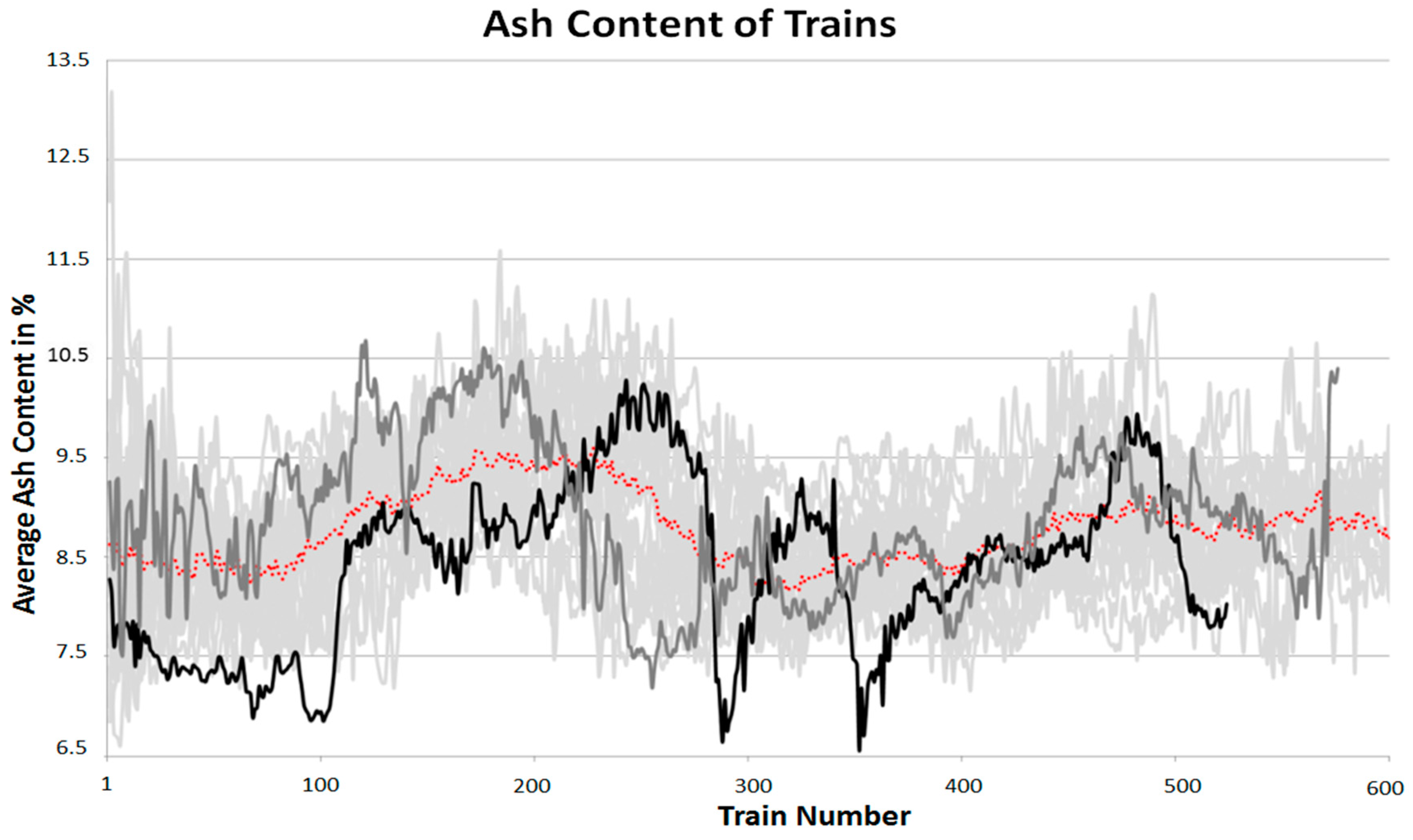
To illustrate the value of the integrated simulation approach for this specific example, the KPI J1 is investigated, which is the ability to meet the coal quality target, in particular the ash content.
Figure 10 shows the ash content for a week of production to be delivered by trains to power plants. Different resource block models were used as input, an estimated model using Kriging, a set of realizations using conditional simulation and the exhaustively known data set (reality). Results reveal that predictions based on the estimated model (black line) and the reality (dark grey line) are not well correlated. Reasons for this effect are the smoothing effect and the introduction of a conditional bias. If based on predictions on the basis of estimated models control decisions are made, it cannot be guaranteed that these decisions will lead to optimal results. Contrary, considering the conditional simulation model, there are 20 realizations (light grey cloud) and the average of the realizations (red line). Comparing geostatistical simulation based predictions with the reality; the red line generally follows the true ash content very well. Differences are in the expected range of deviations which are mapped by the shadow range (realization cloud).
Figure 10.
The average ash content in the delivered trains (reproduced after [
28]).
Figure 10.
The average ash content in the delivered trains (reproduced after [
28]).
The previous example illustrates that the integrated simulation approach is a valid and powerful tool to explore the effect of geological uncertainty on the expected performance of complex continuous mining systems. It provides a valuable tool to the mine planning engineer to foresee critical situations affecting the continuous and reliable supply of raw material. More examples are given in [
28]. The simulator is a key building block within RTRO-Coal and both, ingredient for updating the resource model and basis for the simulation-based optimization.
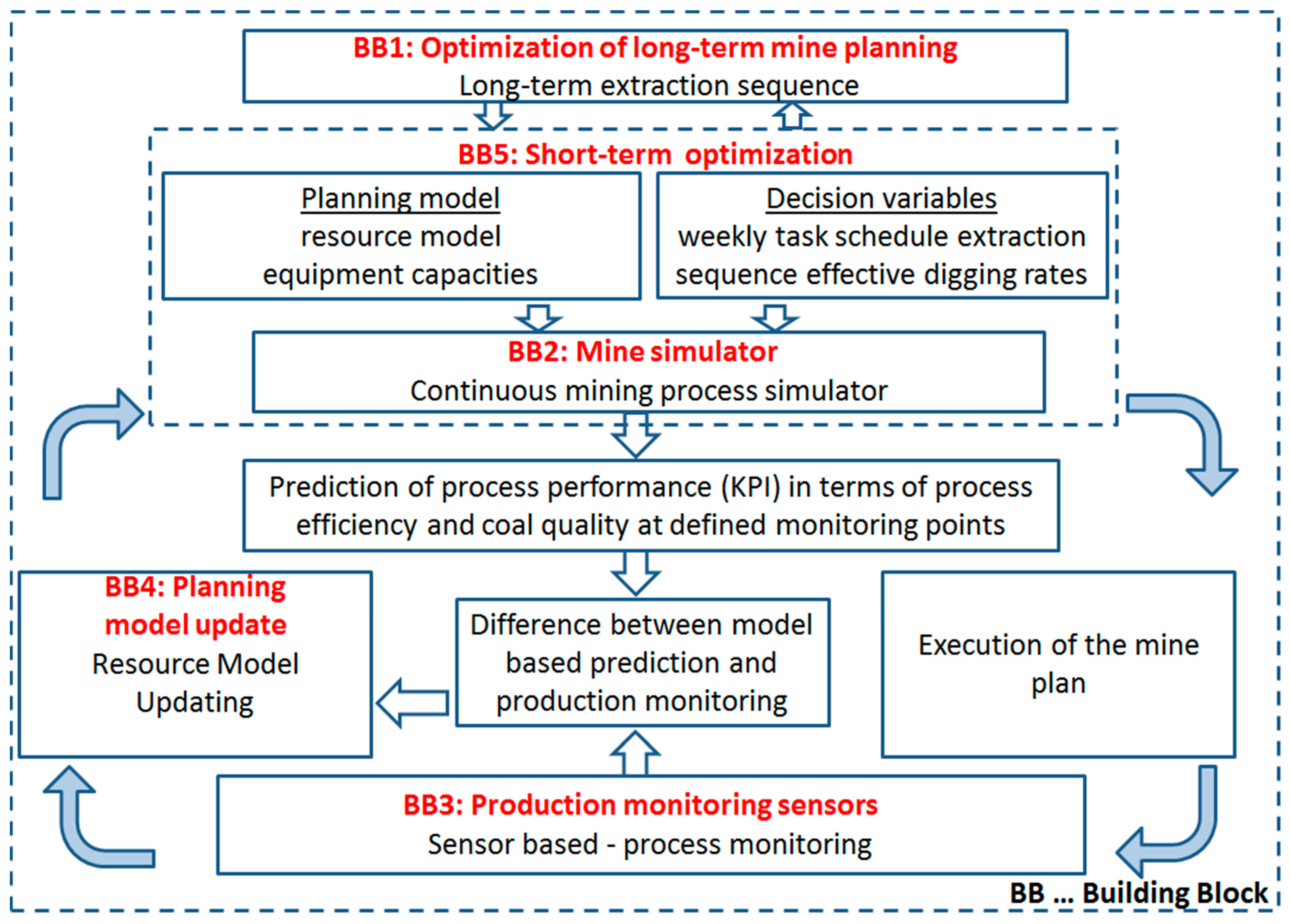
3.5. Resource Model Updating Based on Sensor Data
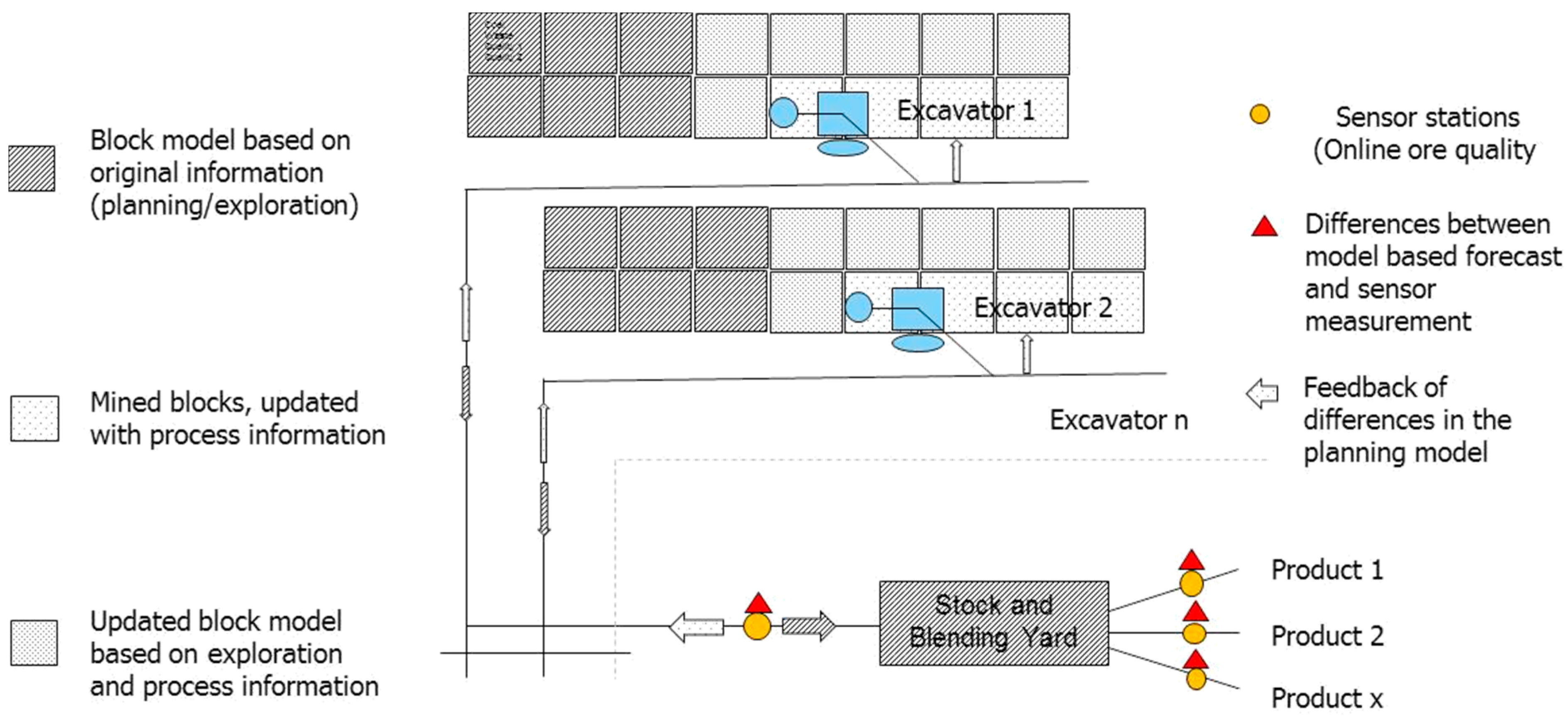
This section introduces a framework for real-time feedback of sensor derived online data into the resource model. The framework consists of three parts: (1) a model based forecast at the sensor station; (2) sensor measurements; and (3) posterior updating of the resource model based on differences between model based prediction and sensor data. The latter one is a challenging task. The material stream passing a sensor station may be composed from different sub-streams coming from different excavators working at different parts in the deposit.
Figure 11 illustrates this case for a continuous open pit mine. The raw material is mined on multiple benches. The flow of material is combined leading to the coal stock and blending yard. If the sensors are located above the central conveyor it is difficult to track back the differences between model based prediction and sensor measurement as the raw material stream originates from multiple different sources with different associated prediction accuracies in the resource models. In this respect, the accuracy of the sensor has to be taken into account as well.
Figure 11.
Closed-loop concept in a continuous mining operation (reproduced after [
29]).
Figure 11.
Closed-loop concept in a continuous mining operation (reproduced after [
29]).
To account for different data originating from different sources with a different data quality, density and support, the currently used methods in geostatistical modelling and data fusion have to be extended. To solve these challenges multiple solutions are possible. Benndorf [
29] proposes a modification of Kalman-Filter techniques, which are designed to sequentially estimate the system states, in this case the local grades at excavation locations, recursively on the basis of noisy input data measured. Kalman [
30] introduced a method in the context of system and control theory, describing a recursive solution to estimate the state of a stochastic process
Zt+1 at time
t+1 based on a prior model of the state
Zt at time
t and observations
l at time
t.
To update a spatial resource model, the system state can be seen in a spatial content and it represents the block model estimate (x), and the observations correspond to sensor measurements during a production period of a certain time span, e.g., 5 min or 1 h.
The underlying idea is to update the resource model, denoted by Zt+1 (x), as a linear combination of the prior block model Zt(x) and the difference between model based prediction and the vector of sensor based measurements l (Equation 1).
Matrix
A is a design matrix and captures the contribution of each reserve block per time interval to the raw material flow produced and observed at a sensor station. The term
AZt(
x) represents the model-based prediction and integrates the operative decisions (digging capacity and location of excavators at each time) in
A and the prior resource/reserve model
Zt(
x). The objective is to determine the matrix
K, which is the unknown updating factor, in literature referred to as Kalman-Gain (e.g., [
31]), as a best linear and unbiased estimator. A detailed derivation is not scope of this paper and the reader is referred to [
29]. It can be shown that
An interpretation of equation (2) reveals the integrative character of the Kalman-Gain. The first term is the inverse of two error sources: (a) the model prediction error, represented by the covariance matrix of the prior resource model , which is propagated through the mining system by the design matrix A and (b) the measurement error, represented by the covariance matrix of the sensor-based measurement . The second term represents again the error source of the model-based prediction. A comparison of potential magnitudes of the two error terms reveals that:
● if the model error is large and the measurement error of data small, the Kalman-Gain K tends towards 1. The application to equation (1) shows that the full difference between model-based prediction and sensor-based measurement is taken into account to update the resource/reserve model.
● if the model error is small and the measurement error of data large, the Kalman-Gain K tends towards 0. The application to equation (1) indicates that the difference between model-based prediction and sensor-based measurement is not taken into account to update the resource/reserve model. The precision of the sensor is too low to add value to the estimation of resources and reserves.
The traditional method is limited to normally distributed errors and linear relationships in the design matrix
A. These assumptions are not always valid in mineral resource extraction, as coal qualities may not be distributed normally and reserve estimation includes non-linear elements, such as minimum mining thicknesses, losses and dilutions. Expression (3) would not be valid. The so called N-Score Ensemble Kalman-Filter (EnKF) (e.g., [
32]), offers a solution, which is founded upon the Monte-Carlo concept. Based on an ensemble of possible scenarios of the resource model, which capture the uncertainty and variability in estimation, the application of equation (1) to each of the ensemble members leads to updated scenarios. A statistical evaluation of the updated models leads to an empirical representation of the new model error
. The Ensemble members can be generated using commonly applied techniques of conditional simulation in geostatistics (e.g., [
1]).
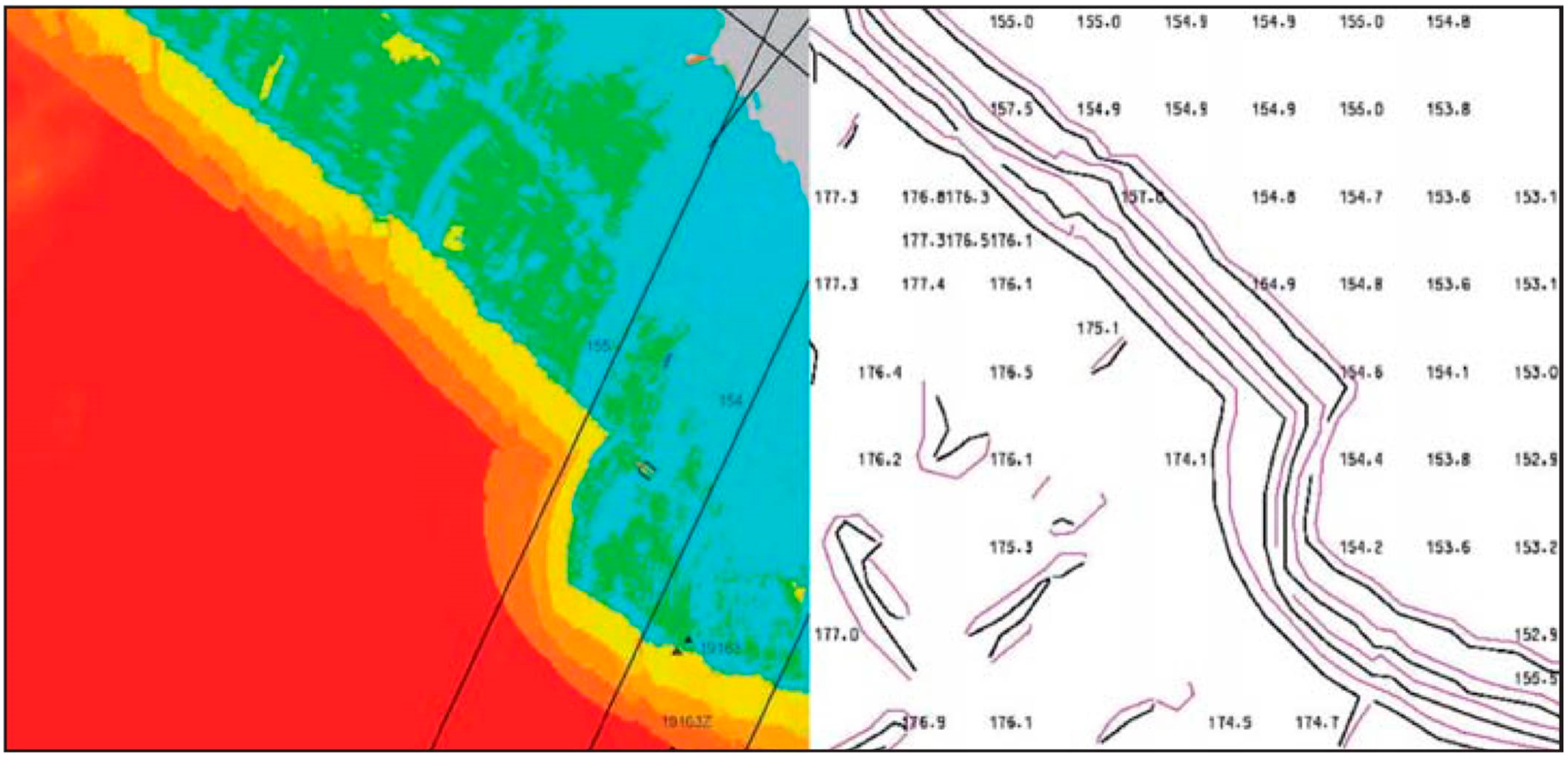
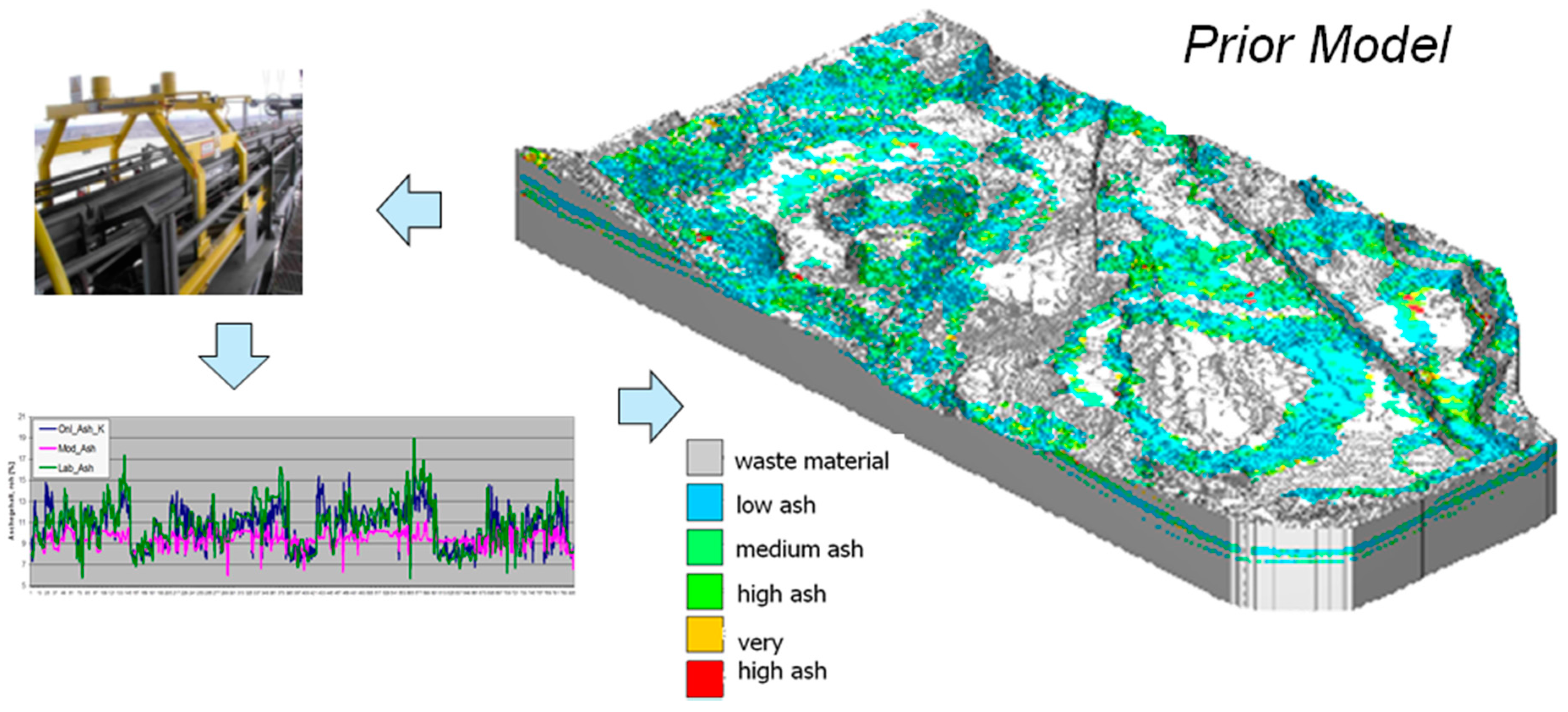
The subsequent example aims to investigate the performance of the proposed updating methodology. Here, an artificial test case presented, which is built around the well-known and fully understood Walker Lake data set [
33]. The data set (
Figure 12) is interpreted as a quality parameter of a coal deposit, e.g., as ash content and is integrated in a typical mine topography. It is sampled irregularly at a spacing corresponding to an average of two reserve block lengths. The blocks were defined with a dimension of 16 m × 16 m × 10 m. The block-variogram is given with a spherical structure, range 50 m, nugget effect 0.4 and sill 0.6.
Figure 12.
Example for resource model updating in a mine.
Figure 12.
Example for resource model updating in a mine.
Taking an assumed density of 2 t/m
3 into account, one mining block represents a tonnage of 5.120 t. Ordinary Kriging was used to generate a resource block model and the prior error covariance matrix, Generalized Sequential Gaussian Simulation was used to derive the realizations or ensemble members for the EnKF application. For simplicity, no dilution and losses were applied resulting in the reserve model being equal to the resource model. The resulting block model (
Figure 12) was used as the prior model.
The artificial block model shall be mined applying a continuous mining system, which initially consists of two bucket-wheel excavators positioned at separate benches. Different digging rates were applied to each excavator as specified in
Table 2. The material is discharged on belt-conveyors positioned on the benches, which are combined to one material flow at the central mass distribution point. The belt speed is assumed to be constant at 6 m/s.
The combined material flow of two excavators is scanned by a sensor positioned above a central conveyor feeding the stock- and blending yard. Since no real sensor data are available, virtual sensor data were generated. The artificial sensor data represent a 10 min moving average (corresponding to about 250 t of production) and are composed of three components. Component one is the true block grade taken from the exhaustively known data set. Component two captures the volume variance relationship and corrects the smaller sensor-measurement support of 250 t to the mining block support of 5120 t by adding the corresponding dispersion variance. The third component mimics the precision of the sensor. For this case study the relative sensor error is varied between 1%, 5% and 10%.
The performance of the proposed updating approach is evaluated using the mean square difference or mean square error (MSE) related to the true block value. Here, the difference between estimated block value
Zt+1(
x) and real block value
Z(
x) from the exhaustive data set is compared. The MSE is an empirical error measure and can be calculated according to
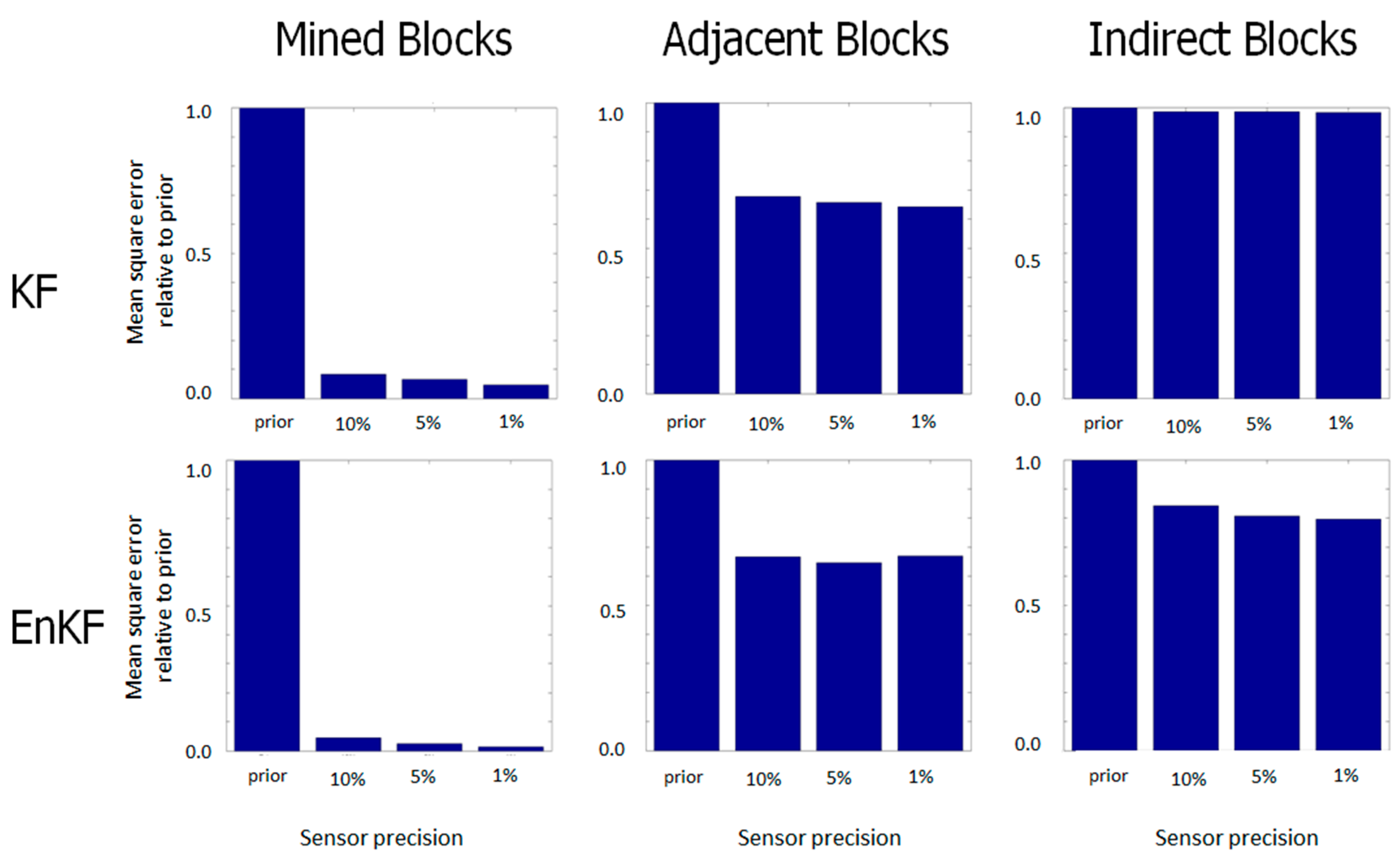
Figure 13 shows the MSE for different sensor precisions compared to the prior case for blocks,
which are already mined,
which are one block distant and will be mined during next working shift, day or week and
which are two blocks distant and will be mined in the near future.
The upper row shows results from the Kalman-Filter, the lower row shows results obtained by the Ensemble Kalman Filter.
Figure 13.
Evaluation of results for resource model updating using the Kalman-Filter (KF) and the Ensemble Kalman-Filter (EnKF) (reproduced after [
29]).
Figure 13.
Evaluation of results for resource model updating using the Kalman-Filter (KF) and the Ensemble Kalman-Filter (EnKF) (reproduced after [
29]).
Figure 13 clearly demonstrates the ability of the presented Kalman-Filter based approach to decrease the uncertainty of predicting block values by updating based on sensor data. Considering the MSE, the following observations can be made:
• For mined blocks, the uncertainty almost vanishes. This is expected because blocks are mined. Residual uncertainties remain due to the sensor precision and the ability to track back the differences to its origin.
• Adjacent blocks are updated resulting in a significant improvement compared to the prior model. For high precision sensors this improvement leads to an about 40% decrease of the MSE. This improvement is due to the positive covariance between two adjacent blocks. In addition, the sensor clearly influences the result.
• Blocks in the second next row are still updated. Due to the larger distance and the corresponding smaller covariance, the effect is less obvious compared to directly adjacent blocks, however, still significant.
With this methodology an updating framework is presented that allows for a sequential integration of production data to continuously improve the resource model. In the next research stage of RTRO-Coal, the validated concept will be applied to a full scale 3D resource model and implemented in a direct mining environment. A bench-marking exercise using historical production monitoring data will be used to calibrate the method.
3.6. Simulation-Based Optimization for Short-Term Mine Planning
The updated resource model possibly will lead to new decisions in short-term operation management such as production sequencing, digging capacity control or stock-pile management. A particular example is to optimize equipment utilization as a function of material management. Consider two scenarios A and B. In scenario A, on a given bench, an excavator has two types of material, coal and waste. The demand of coal and waste differs due to blending constraints and available dump space on the spreader site of the open pit. The objective here is to optimize the sequence of extraction and effective digging rates of individual excavators in a way, which minimizes downtime of equipment due to lack in demand. In scenario B, on a given bench, the excavator has two material types to dig, dry and wet material. The extraction sequence hast to be coordinated in a way, which follows a geotechnical stable dumping sequence of waste material on the dump site. The optimization task is to coordinate the extraction sequence of multiple excavators that the available dump space for wet material is utilized best possible while minimizing downtimes of excavators due to waiting on available dump space.
Methods of mathematical programming, such as Dynamic Programming or Mixed Integer Programming, are well acknowledged in the field of mine planning optimization. Most of the mathematical programming approaches are limited by the amount of decision variables, as applications become large and suffer from reduced computational efficiency. In leading manufacturing process industries, such as aerospace, chemical industry or petroleum engineering, the simulation approach is applied to support making expensive decisions and optimization during design and operation of processes [
34,
35,
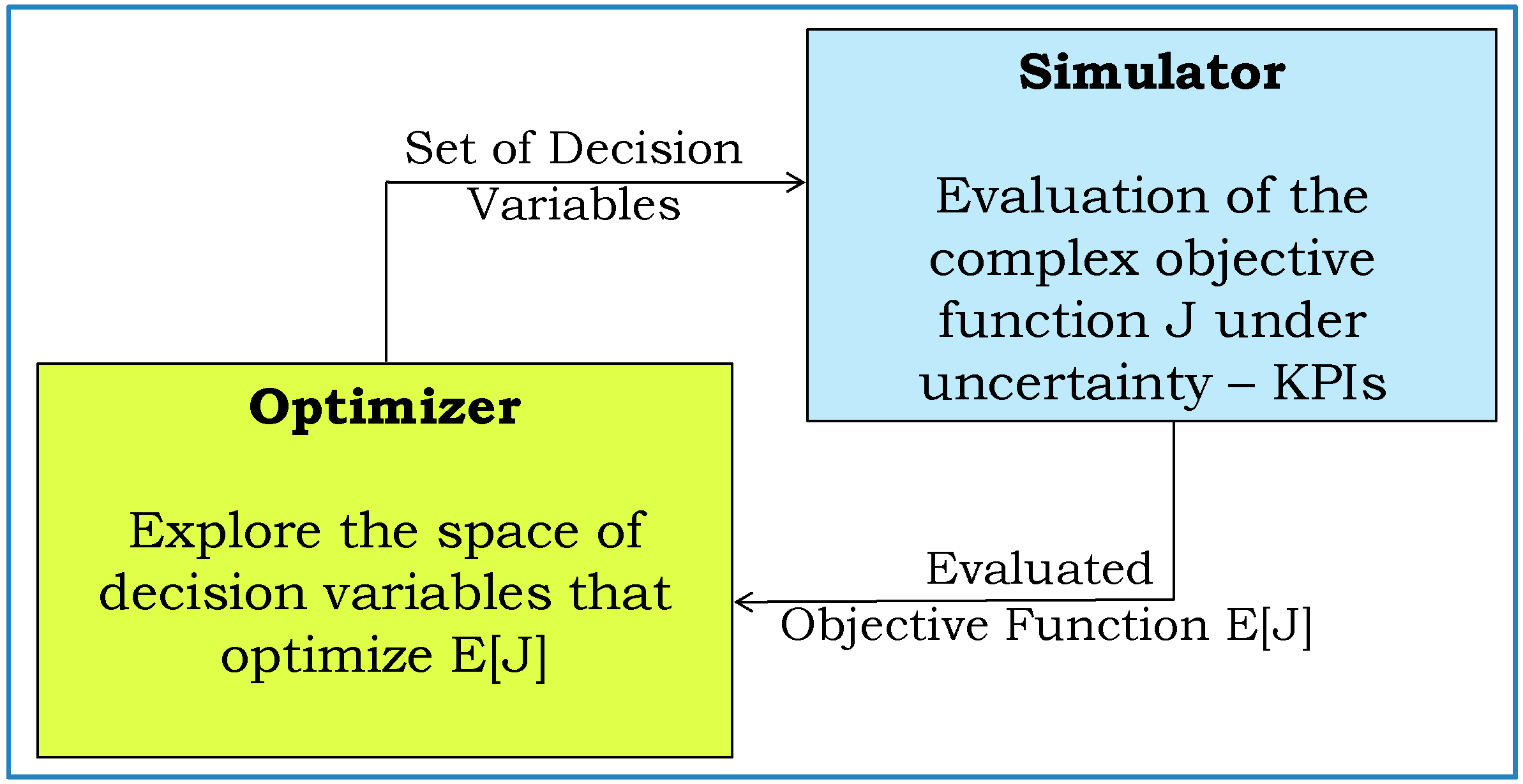
36]. Simulation based optimization methods (
Figure 14), such as Response Surface Methods or Learning Automata Search, have been proven to result in near optimal solutions for decision problems and are especially applicable for scheduling complex and computationally large systems [
37], such as continuous mining operations. The concept of simulation based optimization is shown in
Figure 14. Using general system simulation techniques the objective value J of a complex objective function can be evaluated for a given set of decision variables. The optimization part, such as Response Surface Methods in combination with gradient descent methods explores the space of decision variables to obtain a near to optimal set of these.
Figure 14.
The concept of simulation based optimization.
Figure 14.
The concept of simulation based optimization.
Based on the mine system simulator, RTRO-Coal will explore methods of simulation-based optimization applied to continuous mining systems. To evaluate suitable approaches for the applicability to short-term mine planning of continuous mining systems, the following problem characteristics have to be taken into account:
● The optimization problem consists of discrete decision variables, which determine the extraction sequence of the material (scheduling problem), as well as continuous decision variables to control the effective digging capacities within certain boundaries.
● To provide a detailed enough resolution for scheduling, the amount of decision variables can become rather large resulting in a large-scale optimization problem.
● The objective function value is quantified by a simulator that considers the geological uncertainty, unscheduled breakdowns of equipment, and the uncertain quantity demand of customers. One simulation run might take some time. Therefore, an optimization algorithm is desirable that does not need to call the simulator too often.
● The objective function value is obtained by summing up the weighted system KPIs, which are calculated using outputs generated by a simulator. It can be expected that the design problem is multimodal, consisting of multiple local optima. Consequently, a global optimization mechanism is required that prevents the optimization process from getting trapped in a local optimum.
● Due to the continual gain of additional information during the extraction process, that can be used to update the planning model, the short-term mine planning problem will be re-optimized frequently. Consequently, one optimization run should not take too long.
A first review of simulation based optimization methods resulted in a set of preferred methods for optimizing short-term planning in continuous mining operations [
38]. Next steps involve prioritizing methods, implementing and comparing, validation studies as well as full scale applications in a mining environment.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






