1. Introduction
Viscoelastic relaxation at small strain amplitudes is of geophysical significance as the cause of the attenuation and frequency-dependent wavespeeds (dispersion) of seismic waves within the Earth’s deep interior [
1,
2,
3]. For example, Minster and Anderson [
4] demonstrated the potentially important link between dislocation creep and seismic-wave attenuation, and Karato [
5] showed how the temperature sensitivity of wavespeeds is enhanced by viscoelastic relaxation.
In a very influential contribution, Goetze [
6] reviewed the extensive literature concerning internal friction in metals, measured mainly with resonance (torsional pendulum) techniques, and emphasized the need for high-temperature laboratory measurements on geological materials at sub-Hz teleseismic frequencies rather than the MHz frequencies of conventional laboratory wave-propagation methods. This challenge has been addressed mainly with superior sub-resonant forced-oscillation techniques in multiple laboratories worldwide (e.g., [
7,
8,
9,
10,
11,
12]).
Concerning such methods for the study of high-temperature viscoelasticity, it is well known that there is, in principle, a valuable complementarity between time-domain and frequency- (or period-) domain methods (e.g., [
13]). In practice, time-domain microcreep studies have been used to constrain the value of steady-state viscosity for use in modelling the results of sub-resonant forced oscillation studies [
10,
11]. In our laboratory, consistency between forced-oscillation and microcreep data has been used as evidence of linearity of mechanical behaviour [
14], and microcreep studies have been used to provide a qualitative or quantitative indication of the extent to which the inelastic strain is recoverable on removal of the applied stress [
15,
16]. However, we have not yet fully exploited the valuable complementarity between the forced-oscillation and microcreep methods. The purpose of this investigation is to explore how results obtained in our laboratory from the two methods might best be combined to take advantage of the complementarity.
If a steady stress is suddenly applied at time
t = 0, i.e.,
σ(t) =
H(
t), where H is the Heaviside step function, the resulting strain is specified by the creep function
J(
t). Provided only that the mechanical behaviour is linear, the strain
ε(
t) =
ε0exp(
iωt −
δ) associated with a stress
σ(
t) =
σ0exp(
iωt), that is sinusoidally time-varying with angular frequency
ω, may be calculated by superposition of the strains resulting from a series of consecutive step-function changes in stress each of infinitesimal amplitude. In this way, it is established that
where the (complex) dynamic compliance
J*(ω) is related to the creep function
J(t) by (e.g., [
13,
17]).
In the representation of linear viscoelastic behaviour, the alternative Andrade and extended Burgers creep functions
J(
t), respectively,
and
are widely used. In Equations (3) and (4),
JU is the unrelaxed compliance,
β is the coefficient of the term representing the transient creep varying as the fractional
n-th power of time
t, and
η is the steady-state viscosity. For the Burgers model, the parameter Δ is the anelastic relaxation strength associated with the distribution
D(ln
τ) of anelastic relaxation times.
The distribution D(lnτ) of anelastic relaxation times is commonly prescribed by separately normalised contributions DB(lnτ) and DP(lnτ), appropriate for monotonic dissipation background and a superimposed peak, respectively, along with the associated modulus dispersion:
DB(ln
τ) =
ατα/(
τHα −
τLα), for
τL ≤
τ ≤
τH, and zero elsewhere [
4,
18].
In Equation (5),
τL and
τH are respectively the lower and upper limits of the distribution of anelastic relaxation times
τ, and
α the
τ-exponent in the distribution
DB(ln
τ). The parameters
τP and
σ define the centre and width, respectively, of the log-normal distribution of relaxation times given by
DP(ln
τ). The duration of transient creep involving grain-boundary sliding has been identified with the Maxwell time
τM =
ηJU [
19]. Accordingly, consistent with insights from more recent micromechanical modelling of grain-boundary sliding [
20] and our recent practice [
16], we here set
τH =
τM.
The real and negative imaginary parts of the associated dynamic compliance
J*(ω) =
J1(
ω) −
iJ2(
ω) for the Andrade model are
The corresponding quantities for the extended Burgers model are
In equivalent parameterisations, the Maxwell time τM = ηJU takes the place of viscosity η.
The (stiffness) modulus
M(
ω) and strain energy dissipation
Q−1(
ω) then follow as
Accordingly, it is seen that, in principle, the creep function J(t) and the dynamic compliance J*(ω) contain identical information concerning the mechanical behaviour.
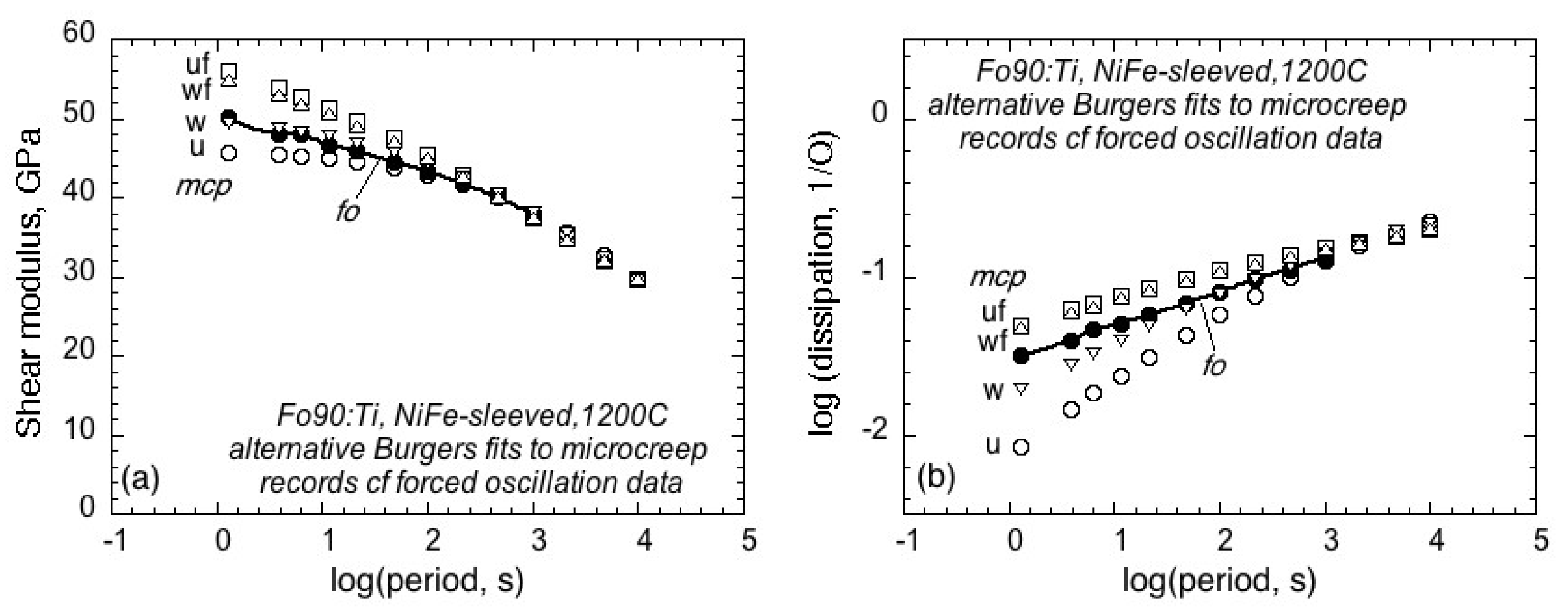
In practice, however, there are two important qualifications. Forced-oscillation measurements of shear modulus G (or Young’s modulus E) and associated strain-energy dissipation Q−1 involve comparison of stress and strain signals of prescribed frequency or period (To) that are intensively sampled—even at short periods. In contrast, microcreep records, of much longer duration, are normally much more sparsely sampled. Thus, in our laboratory, the forced-oscillation and microcreep records are routinely sampled at frequencies of 128/To and 1 Hz, respectively. Accordingly, forced-oscillation data are expected to better resolve the behaviour at short timescales, whereas microcreep records will better resolve the behaviour at long timescales. Furthermore, our microcreep testing protocol involving successive switching of the torque between steady values 0, +L, 0, −L, and 0 has the capacity to distinguish between recoverable (and therefore anelastic) and permanent (viscous) strains, as demonstrated below. Forced-oscillation records comprising multiple complete cycles of oscillation have no such capacity to distinguish between anelastic and viscous behaviour.
2. Materials and Methods
2.1. The Processing of Experimental Forced-Oscillation Data
In our laboratory, shear modulus
G and dissipation
Q−1 are measured at each prescribed oscillation period
To by comparing the complex torsional compliances (rad (Nm)
−1) measured on complementary experimental assemblies containing, respectively, the cylindrical specimen of interest and a control specimen of known, nearly elastic, shear modulus [
9]. Calculation of the compliance differential between the two assemblies serves to eliminate the contribution to the overall compliance from ceramic/steel torsion rods in series mechanically with the specimens. Accordingly, the compliance differential is the difference in compliance between the metal-jacketed specimen and a similarly jacketed control specimen of either polycrystalline alumina or a sapphire crystal. The compliances of the respective assemblies are routinely corrected for the small perturbation caused by interaction between the gas (argon) pressure medium and the central plate moving between the pair of relatively closely spaced outer fixed plates of the capacitance displacement transducers [
21]. The force exerted by the gas medium on the central plate perturbs the observed compliance both by bending the lever arms on which the transducer central plates are mounted and by contributing to the torque. If the space between two parallel circular plates of radius
R is occupied by gas (argon) of density
ρ and viscosity
η, the force F(
t) on the plate with normal displacement d(
t) = d
0exp(
iωt) is
with
The compliance differential is also corrected for any small differences between the dimensions and jacketing of the two specimens. Established procedures for the routine processing of such forced-oscillation data for each of a series of oscillation periods
To, approximately logarithmically equally spaced at each temperature T, are outlined in previous publications [
9,
22]. All such G and
Q−1 data obtained at relatively high temperatures and oscillation periods of 1–1000 s with log
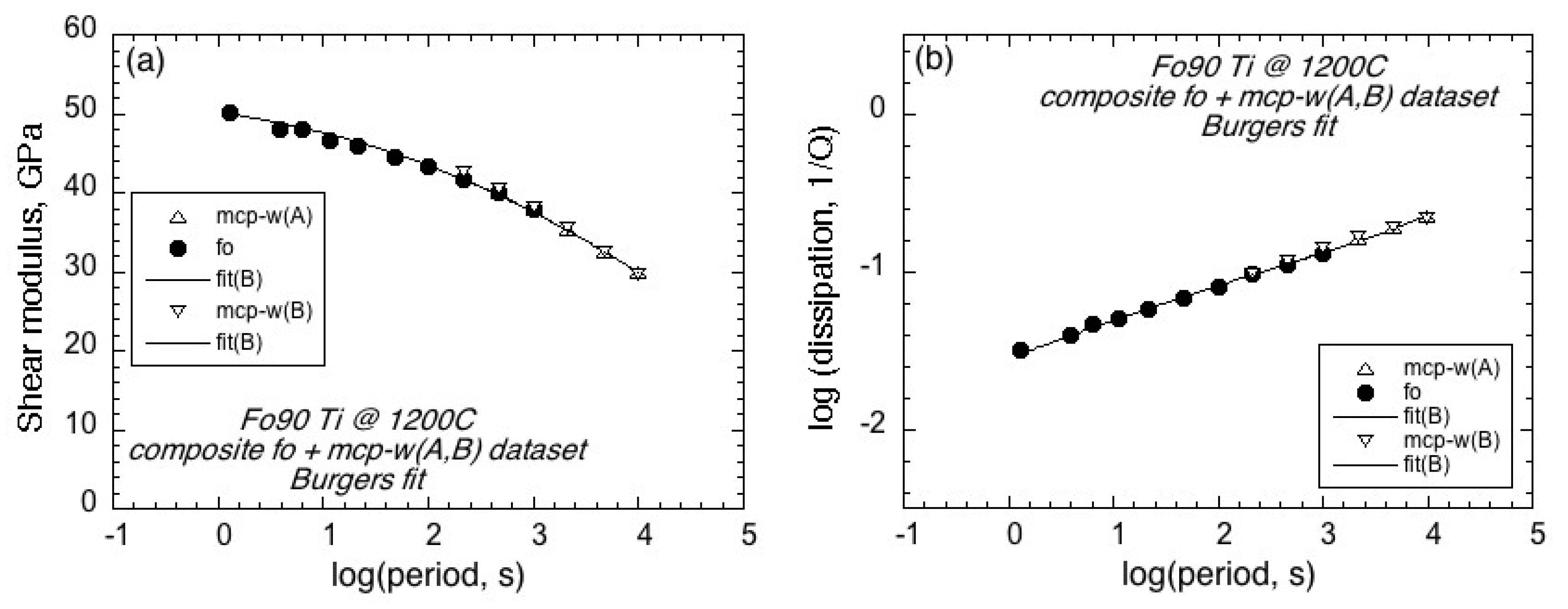
Q−1 > −2.2 are then usually fitted by a non-linear least-squares procedure to an extended Burgers creep function model (e.g., [
23]).
2.2. The Processing of Complementary Torsional Microcreep Records
Torsional microcreep tests in our laboratory, conducted on the same assembly as for the forced-oscillation measurements, involve the application of a torque of amplitude 0, +L, 0, −L, and 0 for successive time intervals typically of 2000 s duration each [
4]. The first segment is used to estimate and correct for any linear drift, leaving a four-segment record of 8000 s duration within which the torque is switched at times
ti, (
i = 1, 2, 3, 4). The switching of the torque can be modelled as the superposition of Heaviside step functions of appropriate sign
si (+1 at
t1 and
t4, −1 at
t2 and
t3) with rise times of order 1 s.
The motion of the central transducer plate relative to the pair of fixed plates following each such switching of the steady torque is well approximated by the expression
The force exerted by the gas medium on the moving plate is found from an analysis similar to that of [
21] to be
with
In Equation (12), the first term on the right-hand side is the force associated with the steady rate d0γ of plate separation, whereas the second term relates to the transiently enhanced rate κd0exp(−κt) of plate separation. Representative second-segment microcreep data have been fitted to Equation (11), allowing calculation of and correction for the influence of the forces (Equation (12)) exerted on the moving transducer plates. The resulting perturbations are of order 0.001 μm at t = 1 s—negligible when compared with displacement amplitudes of 50–100 μm. By comparison, the correction for forced-oscillation displacement amplitudes of similar magnitude at the shortest period of 1.28 s is of order 0.1 μm—large enough to justify their routine correction.
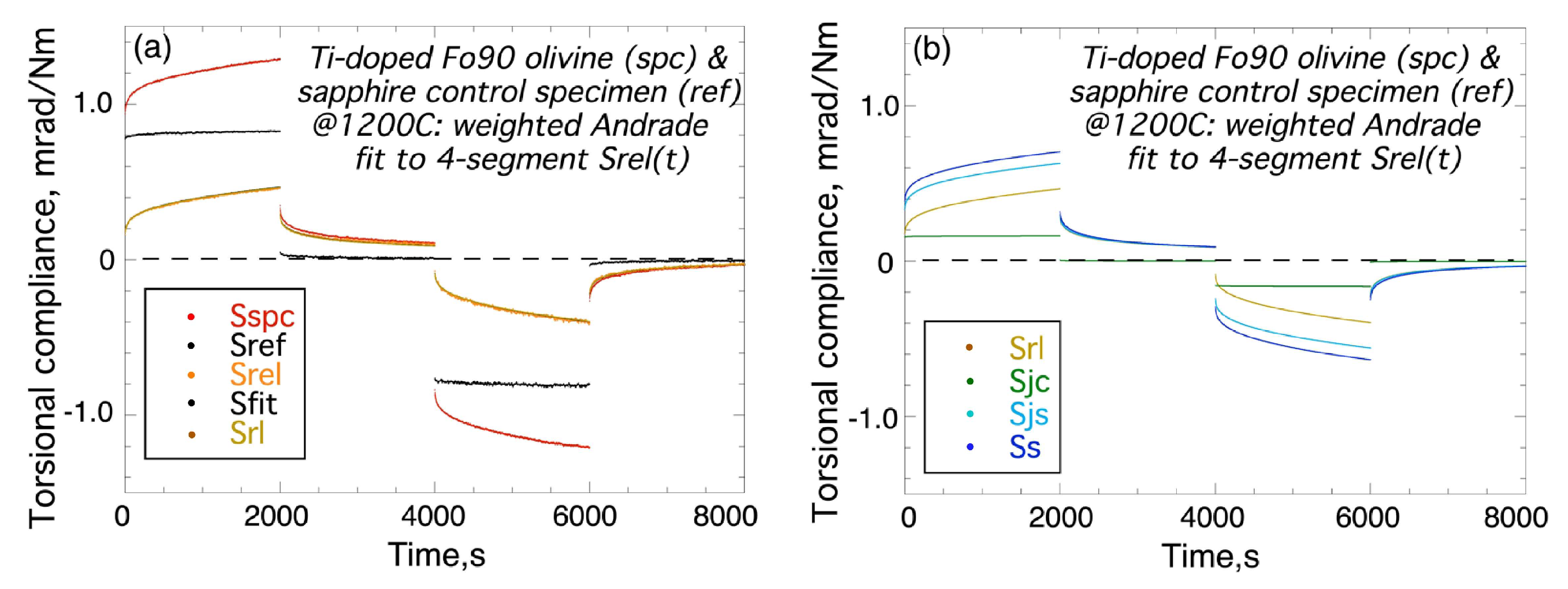
Accordingly, the raw microcreep data are first processed to obtain a quantity termed the instantaneous torsional compliance
Sspc(
t), being the time-dependent twist (radian) per unit torque (Nm) for the specimen assembly containing the polycrystalline specimen sandwiched between torsion rods within the enclosing metal jacket. Subtraction of the corresponding twist per unit torque for the reference assembly,
Sref(
t), in which a control specimen (either Lucalox
TM polycrystalline alumina or sapphire) of known properties is substituted for the specimen, eliminates the unwanted contribution from the steel and alumina torsion rods. The difference
Srel(
t) is thus the twist of the jacketed specimen relative to that of the jacketed control specimen, yet to be corrected for any (usually minor) differences in geometry. This difference signal
Srel(
t) is fitted to a function
Sfit(
t) that is the superposition of the responses to each of the torque switching episodes, prescribed by the appropriate creep function
J(
t′):
where
ti’ =
t −
ti is the time elapsed since the
i-th switching of the torque, for time
t belonging to the
k–th (
k = 1, 4) segment of the four-segment record.
We have explored the option of weighting the fit by specifying an uncertainty in
Srel(
t) proportional to log
tj′,
tj′ being the time elapsed since the most recent (
k–th) switching of the torque. The effect is to weight the data early in each segment relatively more heavily—in order to strengthen the connection with the forced-oscillation data. For the same reason, it may be desirable, as explored in the Results section, to fix certain parameters in the creep function model at values constrained by the forced oscillation data. For reasons of parametric economy, the Andrade creep function (Equation (3)) has thus far been preferred over the extended Burgers alternative (Equation (4)) for use in Equation (14) [
16].
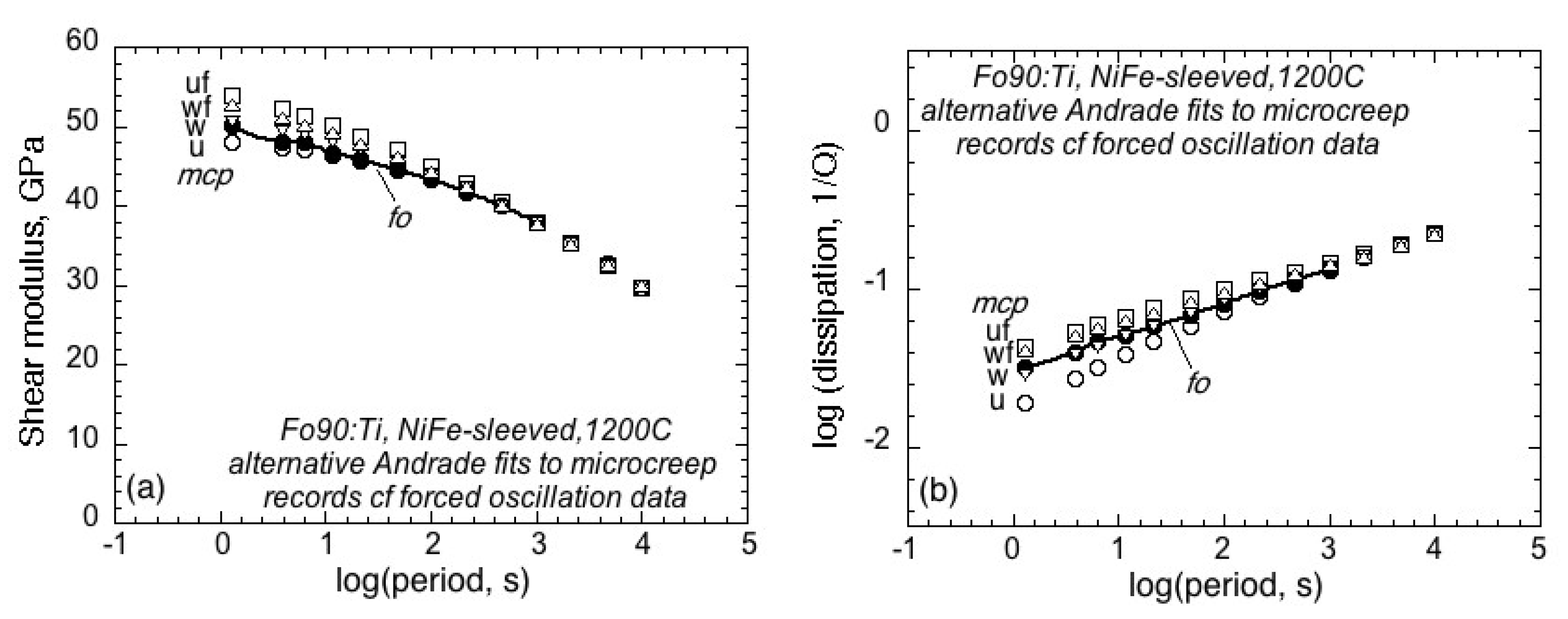
The Andrade creep function J(t) associated with this time-domain fit is then Laplace transformed to obtain the corresponding complex dynamic compliance at selected periods To (those of the forced-oscillation experiments within the range 1–1000 s, and similarly chosen periods within the range 1000–10,000 s). The further processing of the microcreep data then proceeds exactly as for the forced-oscillation data. For the purpose of reconciling the results of the forced-oscillation and microcreep tests, the critical step in the processing of the microcreep record is therefore the fitting of the differential compliance Srel(t) to Equation (14).
A normally very small correction is then applied to the Laplace transform of Srel(t) for any differences in geometry between the two assemblies, to obtain the relative dynamic torsional compliance Srl(To). Srl(To) is added to the dynamic torsional compliance Sjc(To) calculated a priori for the jacketted control specimen from forced-oscillation data for the relevant jacket metal, along with data concerning the viscoelasticity of polycrystalline alumina, or appropriate temperature-dependent elastic properties of single-crystal sapphire. The result is an estimate of the dynamic torsional compliance Sjs(To) of the jacketted specimen. The reciprocal of Sjs, the torsional stiffness (Nm rad−1), is then corrected for the stiffness of the jacket (inclusive of any foil wrapper used to control redox conditions), and inverted to obtain the (complex) dynamic torsional compliance Ss(To) of the bare cylindrical specimen from which its shear modulus G and dissipation Q−1 are calculated. At each stage of this process, conducted within the period domain, the dynamic torsional compliance, fitted to an Andrade creep function, allows the construction of an associated virtual microcreep record by superposition of the responses to the successive episodes of torque switching (through Equation (14)). The results for Srl(t), Sjc(t), Sjs(t) and Ss(t) are intended to provide a clear indication of the relative contributions of the control specimen and jacket (inclusive of any liner) to the observed behaviour.
Concerning the recoverability of the strain, we first examine the use of the Andrade creep function in Equation (14) for the fit to the instantaneous torsional compliance within the second segment of the four-segment record as follows
For
t >>
ti (
i = 1, 2), this expression becomes approximately
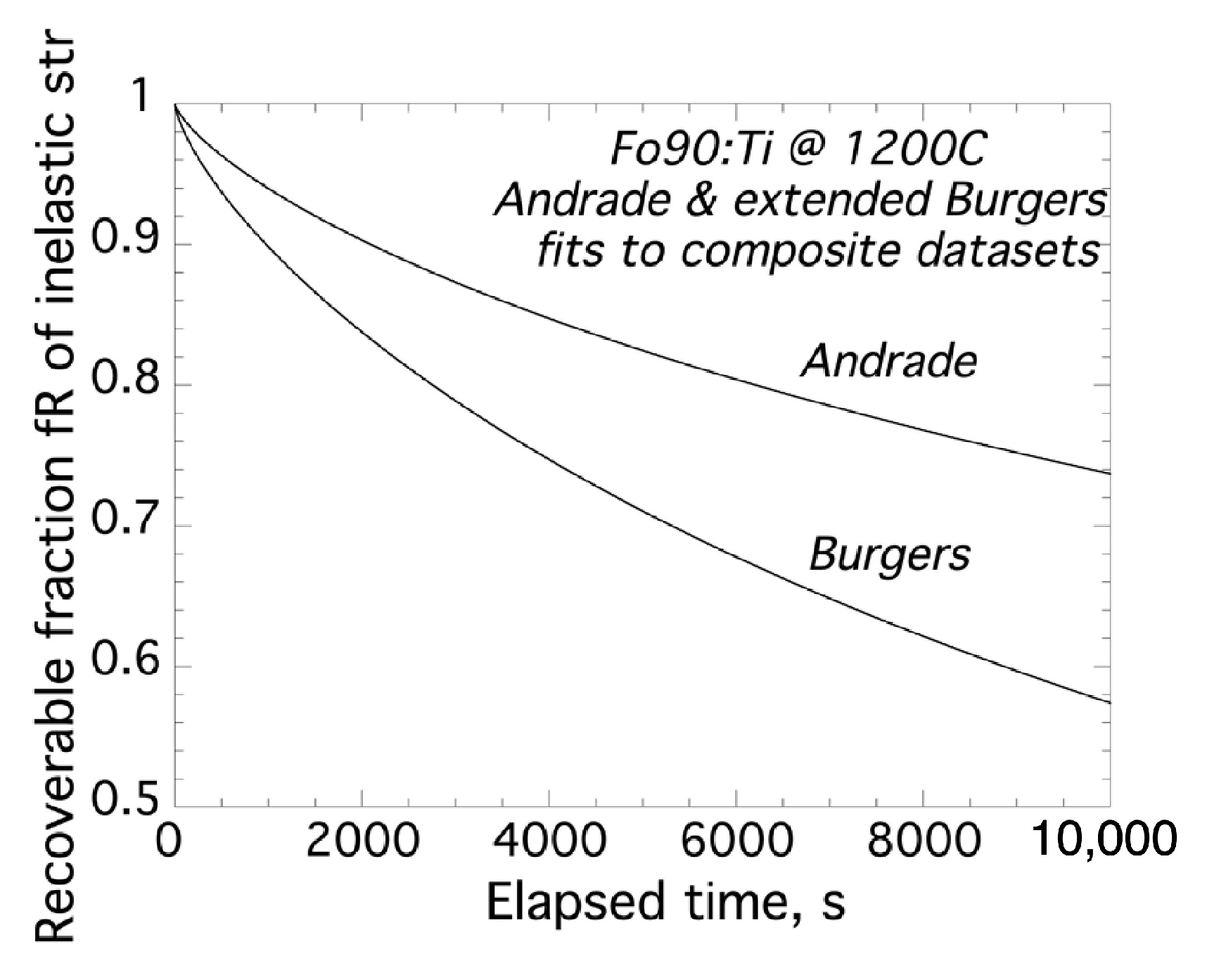
Thus, as t → ∞, the first term in Equation (16) with n typically ~1/3 becomes vanishingly small, indicating that the strain associated with the βtn term in the Andrade creep function is ultimately recoverable.
Accordingly, the fraction
fR of the total inelastic strain
βtn +
t/
η at time
t that is ultimately recoverable following removal of the applied torque is [
16].
Such an estimate can be made for the Andrade model Sfit(t) fitted to the compliance difference Srel(t) between the raw microcreep records right through to the Andrade model fitted to the final Ss(To) data—with closely consistent results concerning the fraction of recoverable strain.
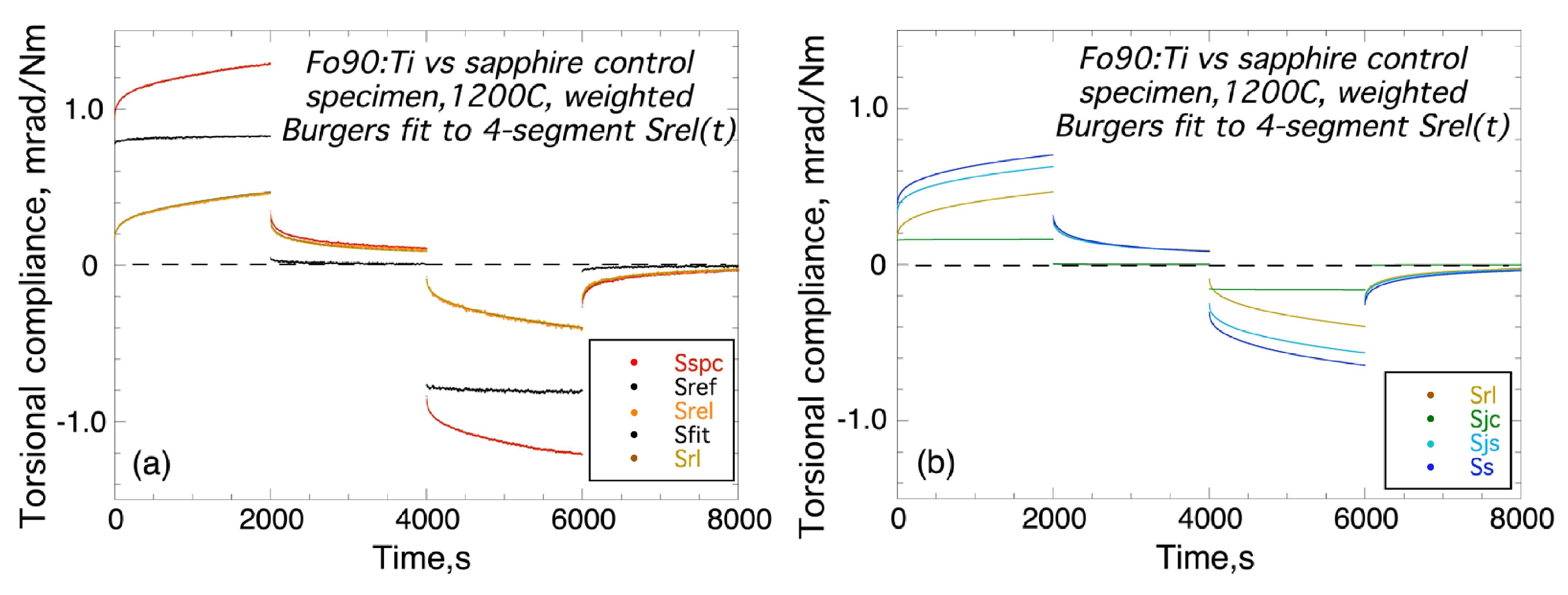
For the alternative extended Burgers model, the fraction
fR of the inelastic strain that is recoverable varies with elapsed time
t as









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}